5G-Enabled Autonomous Driving Demonstration with a V2X Scenario-in-the-Loop Approach

 ,
, 

Abstract
1. Introduction
- It presents real-life 5G based V2X communication scenarios with actual network traffic measurement results—for which no public data are available yet.
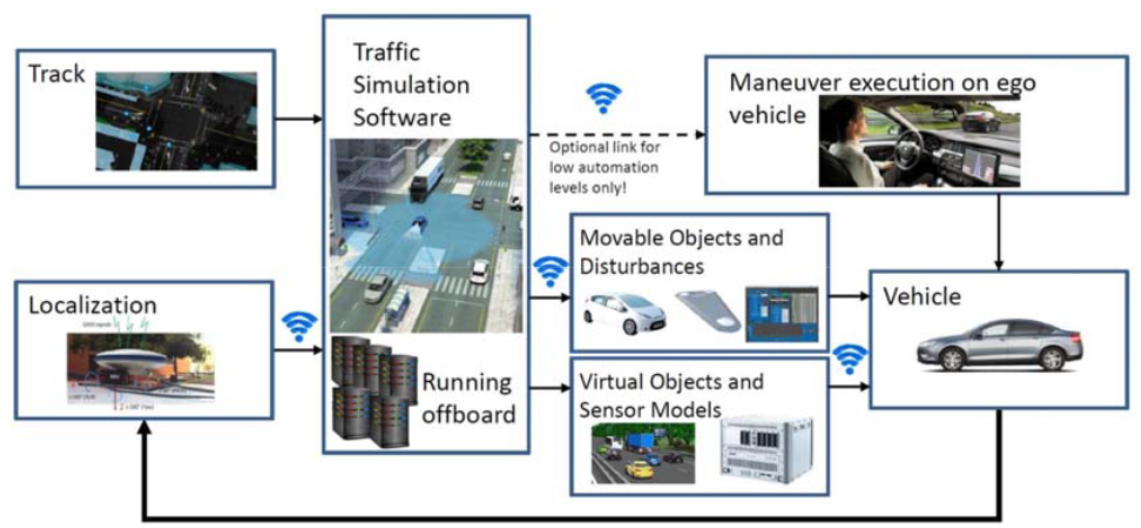
- It presents novel Scenario-in-the-Loop measurements and results, where 5G communication link was necessary for providing a stable, real-time connection between the real world and its virtual representation. This means that the vehicle under test does exactly the same thing in reality and in parallel real-time in the virtual space. It responds real-time either to real obstacles on the test track or obstacles that are generated in the virtual space, such as the dummy during the demo.
- It presents latency, round-trip-time, and packet inter-arrival time results in these real-life scenarios under the 5G NSA architecture. Based on these, it provides a feasibility study on which the vehicular communication scenario can already be supported by this technology.
2. Related Work
2.1. Expectations and Feasibility of 5G in the Field of Vehicle Mobility
2.2. Real-Life Measurements Related to 5G-Supported V2X
2.3. The Concept of Scenario-in-the-Loop—SciL
3. Demonstration Scenarios
- 1
- In the first part of the test, the solutions of another Hungarian automotive organization were presented, partly using the technologies and tools that were used in the previous presentation, but combined and further developing them. The exact position data were supplemented with vehicle environment sensors. Furthermore, information from the Digital Twin also influenced vehicle behavior—in here, the information exchange that is involved the 5G NSA architecture, for which we also measured the network performance.
- 2
- In the second part, the vehicles were moving in a temporarily closed segment of the M86 highway of Hungary. During this setup, the data were gathered through various roadside and vehicle-internal sensors, while 5G NSA measurements were carried out for analysis.
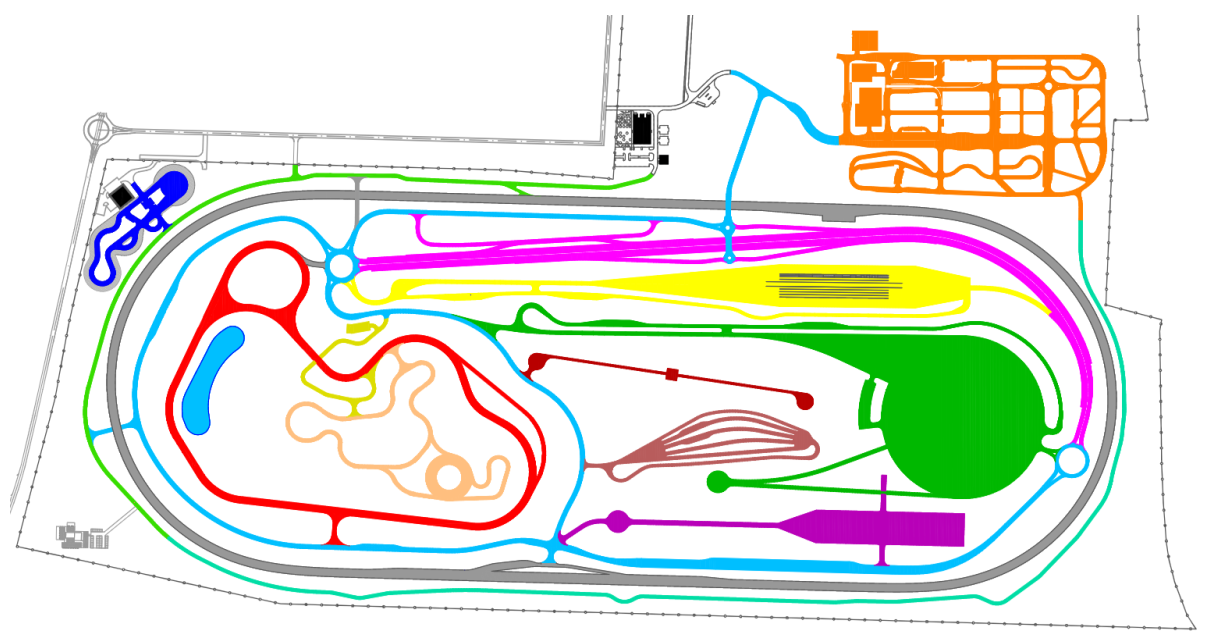
3.1. BME Self-Driving Simulation
- 1
- enter parking space;
- 2
- leaving parking space;
- 3
- stop in front of the virtual pedestrian while turning;
- 4
- stops in front of the real pedestrian;
- 5
- after turning, VUT stops behind the virtual vehicle, then overtake it; and,
- 6
- turn back, follow the real vehicle, then stop.
3.2. Measurement Campaign on M86
4. SciL Demonstration Architecture
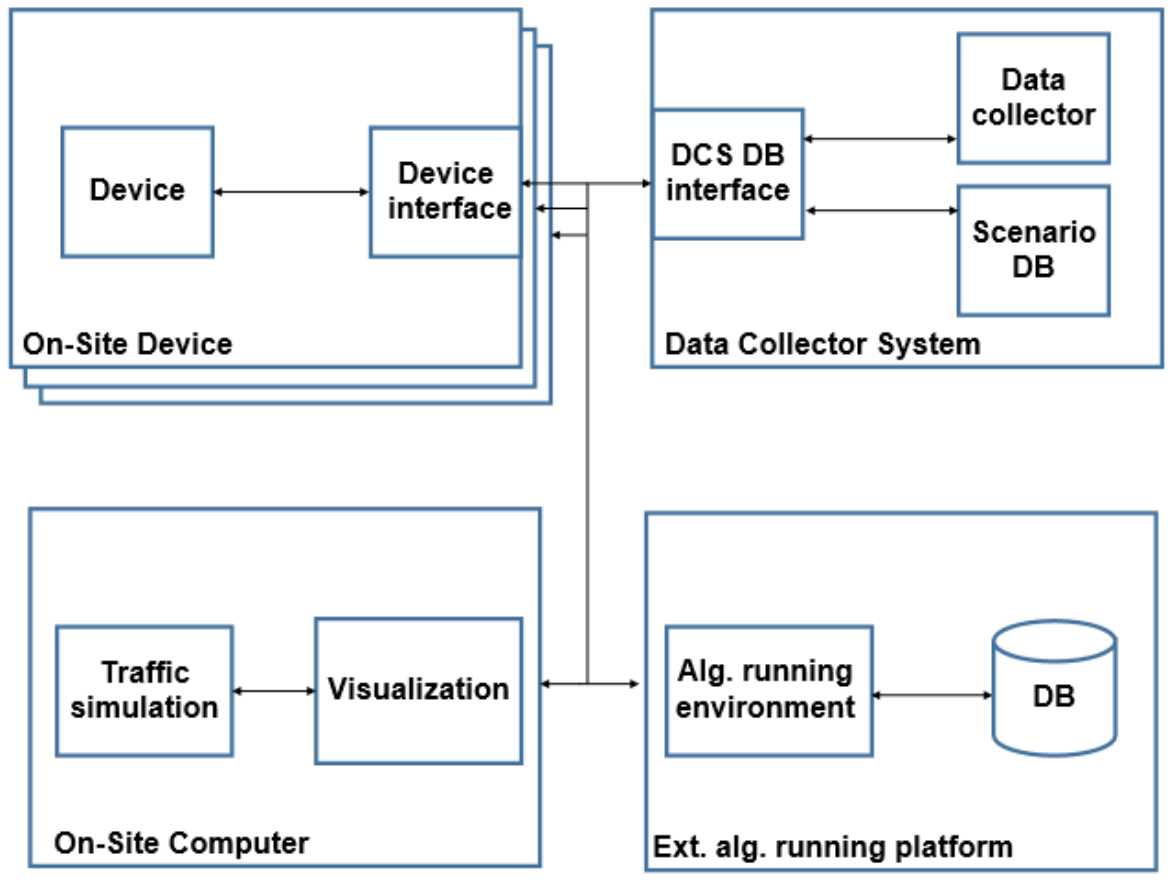
4.1. High-Level Architecture of the SciL Demo System
- devices: data provider or consumer on-site devices—during the demonstration, these included the Vehicle Under Test, road-side-unit sensors, and a physical pedestrian dummy;
- on-site computer: the computer operating the SciL simulation and realizing the Digital Twin; it also receives data directly from the devices and the Data Collector System (DCS);
- data Collector System, DCS: the main task of the DCS is to collect and distribute various data in the system; and,
- external Algorithm Running Platform: There could be external elements receiving and analyzing the data made available through DCS to provide further insights (e.g., for vehicle manufacturers, testers). The current demonstrations have not provided data externally.
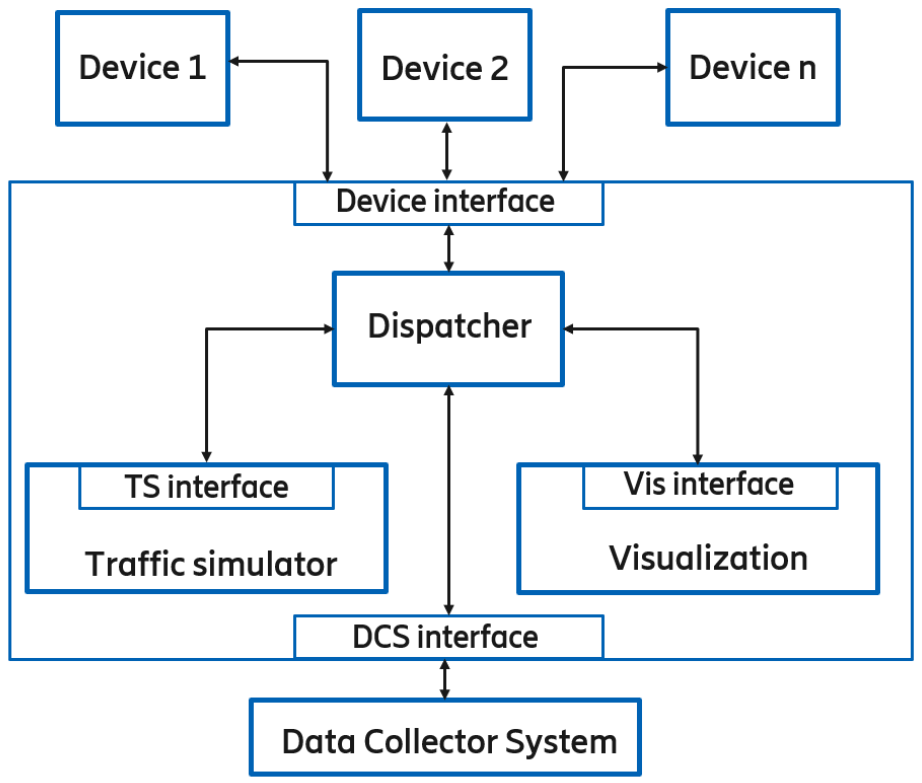
4.2. The On-Site Computer
4.3. SciL System Requirements
- important data must be able to be transferred from devices to on-Site Computers in near real-time;
- important data must be able to be transmitted to the Data Collector System (DCS) in near real-time;
- less important data must be transferred from devices to On-Site Computers; and,
- less important data must be transferred from the devices to the DCS.
- the received data is stored in the database by the DCS;
- the received data have to be transmitted to the target devices via a dispatcher service;
- data service must be provided for the External Algorithm Running Platform; and,
- log events have to be recorded.
4.4. Availability
- Avoid Error—apply development methods that exclude or at least minimize errors.
- Troubleshooting—applying testing procedures that significantly increase the chances of errors being detected before you start using the system.
- Fault Tolerance—the use of design methods that ensure that errors can be detected and managed.
5. 5G Network Measurement Scenario
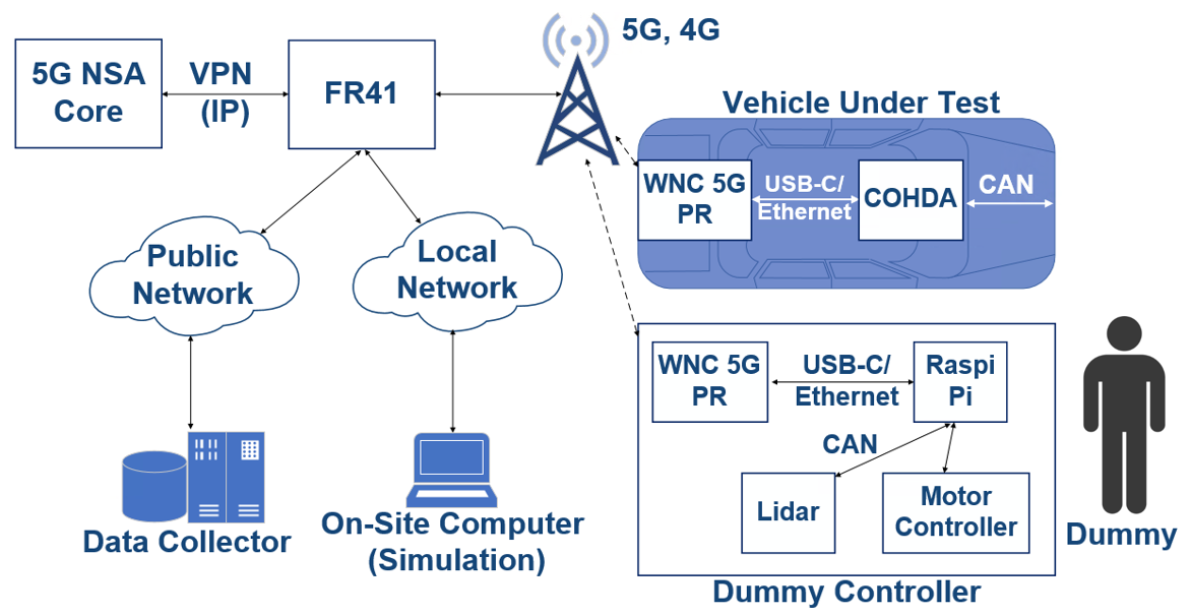
5.1. 5G Network Configuration and Architecture
5.2. Physical Architecture of the Devices
- Smart Fortwo passenger car: the car has undergone individual modifications to provide full-by-wire control—BME development—steering, gas, brake, etc., they are controlled by a special computer placed in the car;
- SciL virtual simulation environment, development of BME with the participation of ZalaZONE Research Team;
- In-vehicle support devices for autonomous mode:
- -
- iMAR positioning system;
- -
- one piece of a camera;
- -
- two pieces of LIDAR;
- -
- one piece of radar equipment.
- one electronically controlled movable Pedestrian Dummy, a development of the ZalaZONE Research Team together with BME;
- one ordinary car to display the traffic situation;
- Ericsson 5G modems; and,
- The 5G test network.
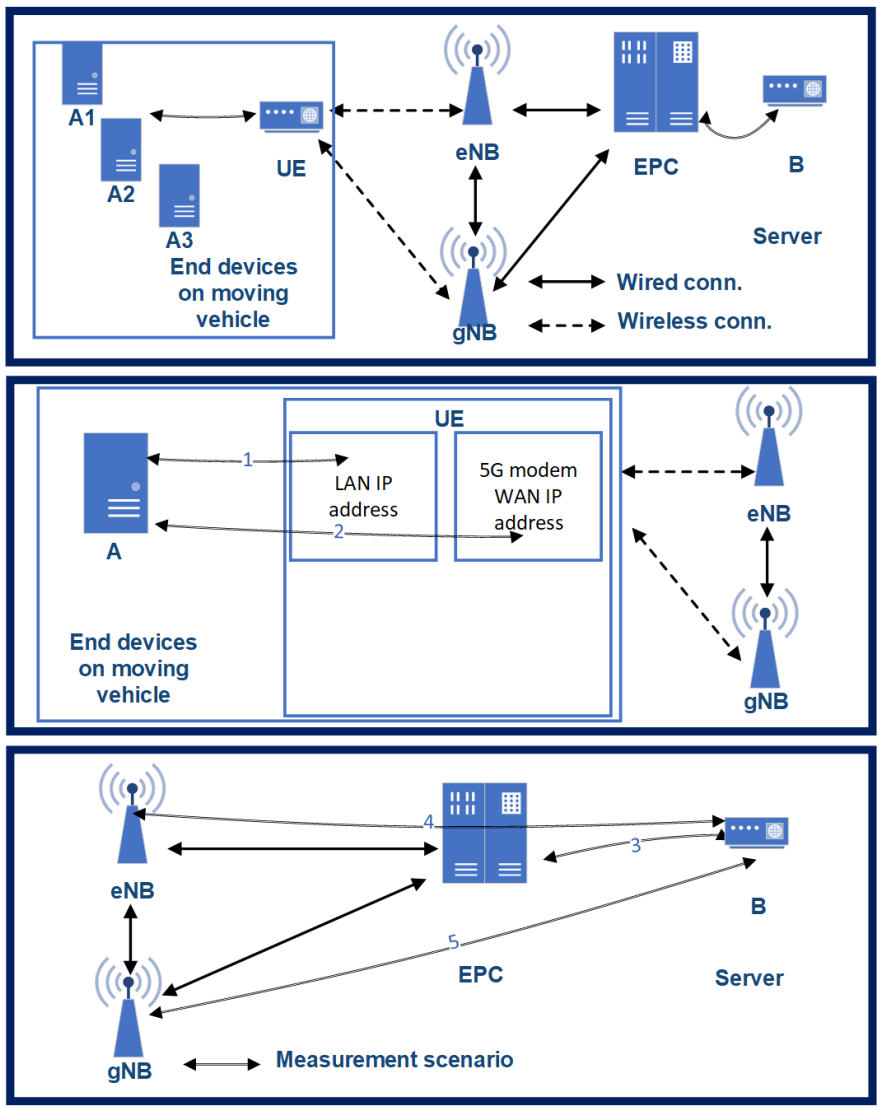
5.3. 5G Connectivity Architecture
- one-way latency (): latency between (l-bw) device A1 and server B.
- Connection 1 (): latency between the UE’s LAN interface (i/f) and the end-devices.
- Connection 2 (): latency between UE’s WAN i/f and end-devices.
- Connection 3 (): latency between EPC SGi i/f and server B.
- Connection 4 (): latency between eNB’s s S1U i/f and server B.
- Connection 5 (): latency between gNB’s S1U i/f and server B.
5.4. Measurement Methodology
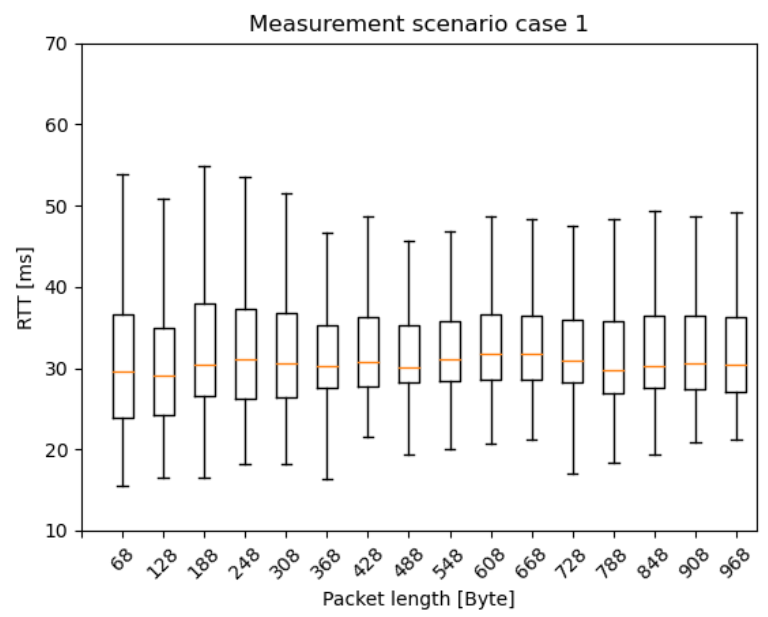
- Scenario 1: from 2 ms IAT and 60 Byte PL to 62 ms IAT and 960 Byte PL, increment the PL by 60 Byte PL for every iteration and the IAT by 20 ms for every fourth iteration;
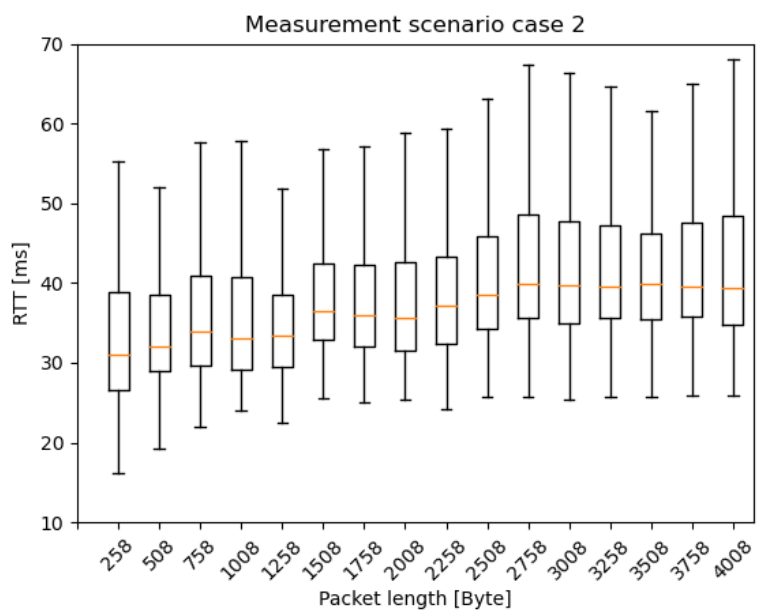
- Scenario 2: from 10 ms IAT and 250 Byte PL, to 310 ms IAT and 4000 Byte PL, increment the PL by 250 Byte for every iteration and the IAT by 100 ms for every fourth iteration;
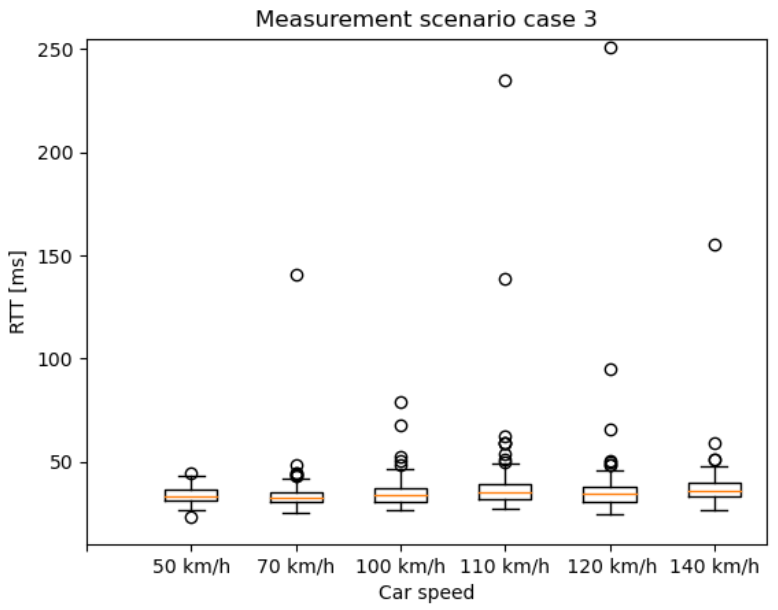
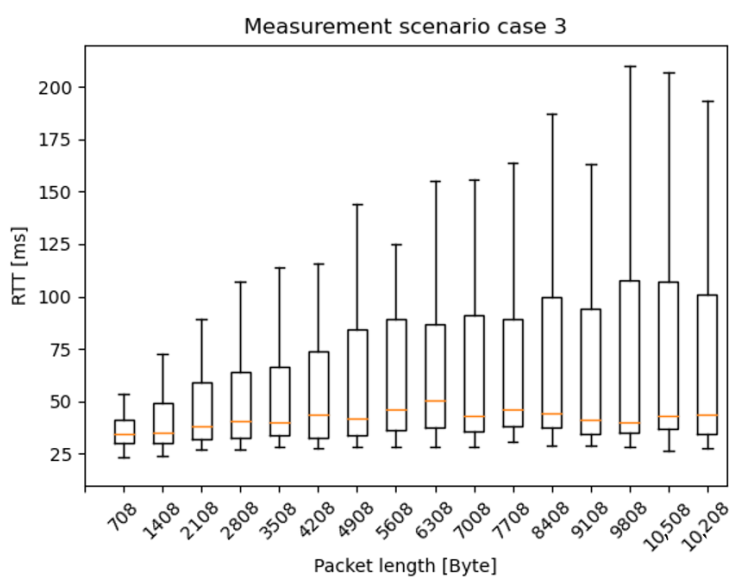
- Scenario 3: from 10 ms IAT and 700 Byte PL, to 610 ms IAT and 11200 Byte PL, increment the PL by 700 Byte for every iteration and the IAT by 200 ms for every fourth iteration; and,
- Const: 2 ms IAT and 40 Byte PL.
5.5. Graphical Presentation
6. Measurement Results
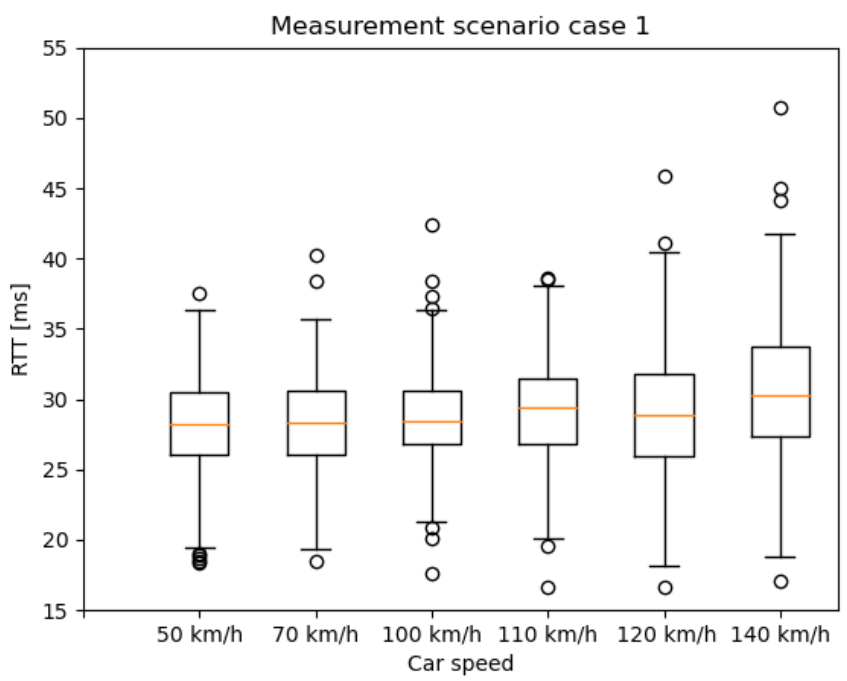
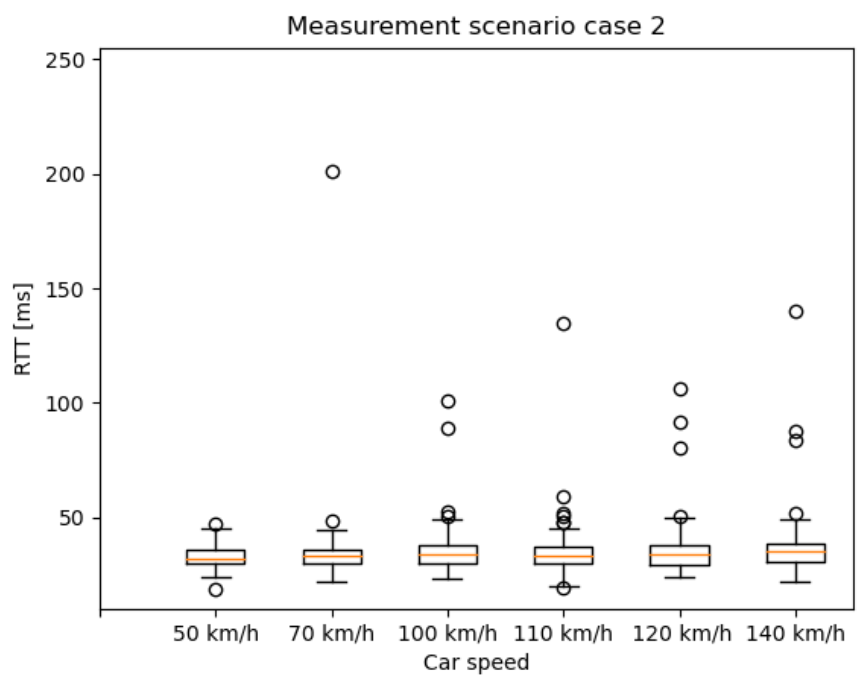
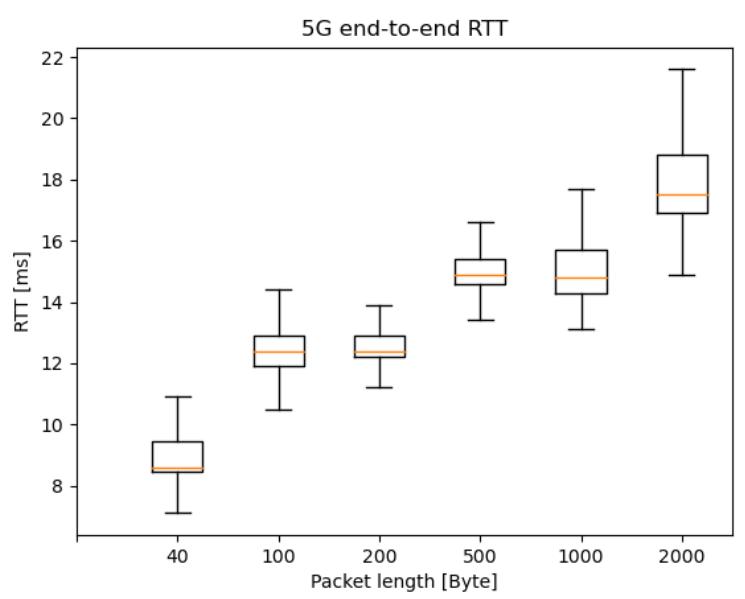
6.1. End-to-End RTT Results Based on the 5G NSA Option 3.X Architecture
6.2. Calculating Average Radio Link Latency in the Real-Life Scenarios
- Connection 1 (): the A1–A2–A3 end-devices were connected to the UE via a Gigabit Ethernet switch. The latency between the A1–A2–A3 devices and the switch was less than 0.2 ms, so, for the measurement, the A1–A2–A3 devices can be considered as an A device.
- Connection 2 (): surprising values were measured in the transmission between the A end-devices and the UE 5G WAN interface. In this connection, packets generated by the end-devices must pass through the UE via Network-Address-Translate or Packet-Address-Translate, which is performed by the UE, utilizing CPU resources. Although the UE’s CPU load was low (20%) throughout the tests, this link adds significant latency to the e2e latency. The value of this latency was 1.9 ms and the jitter was 0.8 ms.
- Connection 3 (): the number of active devices in this connection is minimal. Each data path has at least 10 Gbps of optical data transfer capability. Based on the measurements at latency 2.1 ms, the jitter is less than 0.01 ms, regardless of packet size.
- Connection 4 and 5 (, ): eNB and gNB perform a logically separate task in our measurement layout, but they are physically the same device with the same network connection. The eNB/gNB and the EPC, on the other hand, were physically quite far apart, about 140km, and were used for a variety of optical tracks, microwave sections, and even gigabit copper bridges with several different active L2-L3 devices. The data rate over the entire connection is at least 1 Gbps, latency 5.7 ms and jitter less than 0.9 ms, regardless of packet size.
- End-to-end RTT (): the average RTT of the different measurement scenarios is 29.8 ms.
- End-to-end one-way latency (): the average one-way latency—on 4G connection—from A1 to B is 17.8 ms.
6.3. 5G E2E Reference RTT Measurement with Symmetric New Radio Resources
- Category 1—Vehicles Platooning enables the vehicles to dynamically form a group travelling together.
- Category 2—Advanced Driving enables semi-automated or fully-automated driving.
- Category 3—Extended Sensors enables the exchange of raw or processed data gathered through local sensors or live video data among vehicles, RSUs, devices of pedestrians, and V2X application servers.
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Feddes, G.; Kuipers, J. Software Driving License; Intertraffic: Amsterdam, The Netherlands, 2018. [Google Scholar]
- ZalaZONE. Where Innovation Leads. Available online: https://zalazone.hu/en/ (accessed on 18 December 2020).
- Szalay, Z.; Hamar, Z.; Nyerges, A. Novel design concept for an automotive proving ground supporting multilevel CAV development. Int. J. Veh. Des. 2019, 80, 1–22. [Google Scholar] [CrossRef]
- Horváth, M.; Lu, Q.; Tettamanti, T.; Török, A.; Szalay, Z. Vehicle-In-The-Loop (VIL) and Scenario-In-The-Loop (SCIL) Automotive Simulation Concepts from the Perspectives of Traffic Simulation and Traffic Control. Transp. Telecommun. J. 2020, 20, 153–161. [Google Scholar] [CrossRef]
- Tihanyi, V.; Szalay, Z. Autonomous vehicle platform for demonstration purposes. In Proceedings of the Advanced Manufacturing and Repairing Technologies in Vehicle Industry, Visegrad, Hungary, 17–19 May 2017; pp. 144–148. [Google Scholar]
- Kozma, D.; Soos, G.; Ficzere, D.; Varga, P. Communication Challenges and Solutions between Heterogeneous Industrial IoT Systems. In Proceedings of the 2019 15th International Conference on Network and Service Management (CNSM), Halifax, NS, Canada, 21–25 October 2019. [Google Scholar] [CrossRef]
- Németh, H.; Háry, A.; Szalay, Z.; Tihanyi, V.; Tóth, B. Proving Ground Test Scenarios in Mixed Virtual and Real Environment for Highly Automated Driving. In Mobilität in Zeiten der Veränderung: Technische und Betriebswirtschaftliche Aspekte; Proff, H., Ed.; Springer: Wiesbaden, Germany, 2019; pp. 199–210. [Google Scholar] [CrossRef]
- Heineke, K.; Ménard, A.; Södergren, F.; Wrulich, M. Development in the Mobility Technology Ecosystem—How Can 5G Help? McKinsey and Company. 2019. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/development-in-the-mobility-technology-ecosystem-how-can-5g-help (accessed on 18 December 2020).
- Ge, X. Ultra-Reliable Low-Latency Communications in Autonomous Vehicular Networks. IEEE Trans. Veh. Technol. 2019, 68, 5005–5016. [Google Scholar] [CrossRef]
- Varga, P.; Peto, J.; Frankó, A.; Balla, D.; Haja, D.; Janky, F.; Soos, G.; Ficzere, D.; Maliosz, M.; Toka, L. 5G support for Industrial IoT Applications—Challenges, Solutions, and Research gaps. Sensors 2020, 20, 828. [Google Scholar] [CrossRef]
- Soós, G.; Ficzere, D.; Varga, P.; Szalay, Z. Practical 5G KPI Measurement Results on a Non-Standalone Architecture. In Proceedings of the NOMS 2020—2020 IEEE/IFIP Network Operations and Management Symposium, Budapest, Hungary, 20–24 April 2020; pp. 1–5. [Google Scholar]
- 3GPP. Service Requirements for the 5G System; TS 22.261 v17.0.1; 3rd Generation Partnership Project: Valbonne, France, 2019. [Google Scholar]
- 3GPP. Service Requirements for Cyber-Physical Control Applications in Vertical Domains; TS 22.104 v17.2.0; 3rd Generation Partnership Project: Valbonne, France, 2019. [Google Scholar]
- 3GPP. Service Requirements for Enhanced V2X Scenarios; TS 22.186 v16.2.0; 3rd Generation Partnership Project: Valbonne, France, 2019. [Google Scholar]
- 3GPP. Mobile Communication System for Railways; TS 22.289 v16.1.0; 3rd Generation Partnership Project: Valbonne, France, 2019. [Google Scholar]
- 3GPP. System Architecture for the 5G System (5GS); Stage 2; TS 23.501 v15.8.0; 3rd Generation Partnership Project: Valbonne, France, 2019. [Google Scholar]
- Afaq, M.; Iqbal, J.; Ahmed, T.; Ul Islam, I.; Khan, M.; Khan, M.S. Towards 5G network slicing for vehicular ad-hoc networks: An end-to-end approach. Comput. Commun. 2020, 149, 252–258. [Google Scholar] [CrossRef]
- ONF. Converged Multi-Access and Core (COMAC); TS 102; Open Networking Foundation: Menlo Park, CA, USA, 2020. [Google Scholar]
- Yu, R.; Ding, J.; Huang, X.; Zhou, M.; Gjessing, S.; Zhang, Y. Optimal Resource Sharing in 5G-Enabled Vehicular Networks: A Matrix Game Approach. IEEE Trans. Veh. Technol. 2016, 65, 7844–7856. [Google Scholar] [CrossRef]
- Balasubramanian, V.; Otoum, S.; Aloqaily, M.; Al Ridhawi, I.; Jararweh, Y. Low-latency vehicular edge: A vehicular infrastructure model for 5G. Simul. Model. Pract. Theory 2020, 98, 101968. [Google Scholar] [CrossRef]
- Li, G.; Lai, C. Platoon Handover Authentication in 5G-V2X: IEEE CNS 20 Poster. In Proceedings of the 2020 IEEE Conference on Communications and Network Security (CNS), Avignon, France, 29 June–1 July 2020; pp. 1–2. [Google Scholar] [CrossRef]
- Ullah, H.; Gopalakrishnan Nair, N.; Moore, A.; Nugent, C.; Muschamp, P.; Cuevas, M. 5G Communication: An Overview of Vehicle-to-Everything, Drones, and Healthcare Use-Cases. IEEE Access 2019, 7, 37251–37268. [Google Scholar] [CrossRef]
- Soós, G.; Ficzere, D.; Varga, P. Towards Traffic Identification and Modeling for 5G Application Use-Cases. Electronics 2020, 9, 640. [Google Scholar] [CrossRef]
- Isto, P.; Heikkilä, T.; Mämmelä, A.; Uitto, M.; Seppälä, T.; Ahola, J.M. 5G Based Machine Remote Operation Development Utilizing Digital Twin. Open Eng. 2020, 10, 265–272. [Google Scholar] [CrossRef]
- Cao, H.; Gangakhedkar, S.; Ali, A.R.; Gharba, M.; Eichinger, J. A 5G V2X testbed for cooperative automated driving. In Proceedings of the 2016 IEEE Vehicular Networking Conference (VNC), Columbus, OH, USA, 8–10 December 2016; pp. 1–4. [Google Scholar]
- Maskulainen, I.; Luoto, P.; Pirinen, P.; Bennis, M.; Horneman, K.; Latva-aho, M. Performance evaluation of adaptive beamforming in 5G-V2X networks. In Proceedings of the 2017 European Conference on Networks and Communications (EuCNC), Oulu, Finland, 12–15 June 2017; pp. 1–5. [Google Scholar]
- Barmpounakis, S.; Tsiatsios, G.; Papadakis, M.; Mitsianis, E.; Koursioumpas, N.; Alonistioti, N. Collision avoidance in 5G using MEC and NFV: The vulnerable road user safety use case. Comput. Netw. 2020, 172, 107150. [Google Scholar] [CrossRef]
- Wang, P.; Di, B.; Zhang, H.; Bian, K.; Song, L. Platoon Cooperation in Cellular V2X Networks for 5G and Beyond. IEEE Trans. Wirel. Commun. 2019, 18, 3919–3932. [Google Scholar] [CrossRef]
- Kiela, K.; Barzdenas, V.; Jurgo, M.; Macaitis, V.; Rafanavicius, J.; Vasjanov, A.; Kladovscikov, L.; Navickas, R. Review of V2X–IoT Standards and Frameworks for ITS Applications. Appl. Sci. 2020, 10, 4314. [Google Scholar] [CrossRef]
- Lee, W.; Na, T.; Kim, J. How to Create a Network Slice? —A 5G Core Network Perspective. In Proceedings of the 2019 21st International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 17–20 February 2019; pp. 616–619. [Google Scholar] [CrossRef]
- Srinivasa, R.; Naidu, N.K.S.; Maheshwari, S.; Bharathi, C.; Hemanth Kumar, A.R. Minimizing Latency for 5G Multimedia and V2X Applications using Mobile Edge Computing. In Proceedings of the 2019 2nd International Conference on Intelligent Communication and Computational Techniques (ICCT), Jaipur, India, 28–29 September 2019; pp. 213–217. [Google Scholar] [CrossRef]
- Husain, S.S.; Kunz, A.; Prasad, A.; Pateromichelakis, E.; Samdanis, K. Ultra-High Reliable 5G V2X Communications. IEEE Commun. Stand. Mag. 2019, 3, 46–52. [Google Scholar] [CrossRef]
- Hawkins, A.J. Waymo Gets the Green Light to Test Fully Driverless Cars in California. Available online: https://www.theverge.com/2018/10/30/18044670/waymo-fully-driverless-car-permit-california-dmv (accessed on 18 December 2020).
- Wang, J.; Shao, Y.; Ge, Y.; Yu, R. A Survey of Vehicle to Everything (V2X) Testing. Sensors 2020, 19, 334. [Google Scholar] [CrossRef] [PubMed]
- Park, C.; Chung, S.; Lee, H. Vehicle-in-the-Loop in Global Coordinates for Advanced Driver Assistance System. Appl. Sci. 2020, 10, 2645. [Google Scholar] [CrossRef]
- Horváth, M.; Tettamanti, T.; Varga, B.; Szalay, Z. The Scenario-in-the-Loop (SciL) automotive simulation concept and its realisation principles for traffic control. In Proceedings of the 8th Symposium of the European Association for Research in Transportation, Budapest, Hungray, 4–6 September 2019. [Google Scholar]
- Eichberger, A.; Markovic, G.; Magosi, Z.; Rogic, B.; Lex, C.; Samiee, S. A Car2X sensor model for virtual development of automated driving. Int. J. Adv. Robot. Syst. 2017, 14, 172988141772562. [Google Scholar] [CrossRef]
- Pariota, L.; Bifulco, G.N.; Markkula, G.; Romano, R. Validation of driving behaviour as a step towards the investigation of Connected and Automated Vehicles by means of driving simulators. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, 26–28 June 2017; pp. 274–279. [Google Scholar]
- Szalay, Z.; Szalai, M.; Tóth, B.; Tettamanti, T.; Tihanyi, V. Proof of concept for Scenario-in-the-Loop (SciL) testing for autonomous vehicle technology. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019; pp. 1–5. [Google Scholar] [CrossRef]
- ASAM. ASAM OpenSCENARIO. Available online: https://www.asam.net/standards/detail/openscenario/ (accessed on 27 November 2020).
- GSMA. 5G Implementation Guidelines: NSA Option 3; Technical Report; GSM Association: London, UK, 2020. [Google Scholar]
- Alekszejenko, L.; Dobrowiecki, T. Adapting IT Algorithms and Protocols to an Intelligent Urban Traffic Control. Inforcommun. J. 2020, 12. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Requirements | Hard-Real-Time | Soft-Real-Time |
|---|---|---|
| Typical response time | milliseconds range | seconds range |
| Behaviour at peak load | Well-defined, prioritised | Best effort, problems can occur at peak loads |
| Timing control | Deterministic, quasi-synchronous | Depending on the environment, non-deterministic response time |
| Safety and error detection | Autonomous error detection | Operator intervention |
| Typical size of data | Small (tens of Bytes) | Big (kBytes, or greater streams) |
| Type of Data | Sensor Device |
|---|---|
| GNSS coordinates | GNSS |
| Direction | GNSS/IMU |
| Velocity | GNSS/IMU/ECU |
| Acceleration | GNSS/IMU/ECU |
| Dynamic objects | Camera/Lidar/Radar/V2X |
| Lane position | Camera/GNSS |
| Lane geometry | Camera |
| Neighbour lanes | Camera |
| 4G—Only | 5G—1 UE | 5G—2 UE | |
|---|---|---|---|
| Downlink Peak Rate | 420 Mbps | 885 Mbps | 1465 Mbps |
| Uplink Peak Rate | 87 Mbps | 92 Mbps | 91 Mbps |
| Latency (one-way) | 12 ms | 3.71 ms | 4.96 ms |
| Packet Error Rate | 0.2% | 0.39% | 0.67% |
| Packet Length | Minimum | Average | Maximum | Standard Deviation |
|---|---|---|---|---|
| 40 Byte | 6.958 ms | 9.247 ms | 25.135 ms | 1.486 ms |
| 100 Byte | 10.002 ms | 12.739 ms | 25.796 ms | 1.463 ms |
| 200 Byte | 10.511 ms | 12.837 ms | 32.174 ms | 1.489 ms |
| 500 Byte | 13.095 ms | 15.380 ms | 34.815 ms | 1.560 ms |
| 1000 Byte | 13.223 ms | 15.470 ms | 136.886 ms | 3.280 ms |
| 2000 Byte | 14.944 ms | 18.580 ms | 129.536 ms | 3.883 ms |
| Communication Scenario | Degree | Max E2E Latency [ms] | Data Rate [Mbps] | Min Range [m] |
|---|---|---|---|---|
| Cooperative driving for vehicle platooning | Lowest degree of automation | 25 | – | – |
| Low degree of automation | 20 | – | 350 | |
| High degree of automation | 20 | 65 | 180 | |
| Reporting for platooning | N/A | 500 | – | – |
| Information sharing for platooning | Lower degree of automation | 20 | – | 350 |
| Higher degree of automation | 20 | 50 | 180 | |
| Inf. sharing for automated driving supporting V2X | Lower degree of automation | 100 | – | 700 |
| Higher degree of automation | 100 | 10 | 360 | |
| Inf. sharing for automated driving supporting V2X and RSU | Lower degree of automation | 100 | – | 700 |
| Higher degree of automation | 100 | 53 | 360 | |
| Intersection safety information | – | – | UL: 0. 25 DL: 50 (NOTE 1) | – |
| Cooperative lane change | Lower degree of automation | 25 | – | – |
| Sensor information sharing | Lower degree of automation | 100 | – | 1000 |
| Video sharing | Lower degree of automation | 90 | 10 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szalay, Z.; Ficzere, D.; Tihanyi, V.; Magyar, F.; Soós, G.; Varga, P. 5G-Enabled Autonomous Driving Demonstration with a V2X Scenario-in-the-Loop Approach. Sensors 2020, 20, 7344. https://doi.org/10.3390/s20247344
Szalay Z, Ficzere D, Tihanyi V, Magyar F, Soós G, Varga P. 5G-Enabled Autonomous Driving Demonstration with a V2X Scenario-in-the-Loop Approach. Sensors. 2020; 20(24):7344. https://doi.org/10.3390/s20247344
Chicago/Turabian StyleSzalay, Zsolt, Dániel Ficzere, Viktor Tihanyi, Ferenc Magyar, Gábor Soós, and Pál Varga. 2020. "5G-Enabled Autonomous Driving Demonstration with a V2X Scenario-in-the-Loop Approach" Sensors 20, no. 24: 7344. https://doi.org/10.3390/s20247344
APA StyleSzalay, Z., Ficzere, D., Tihanyi, V., Magyar, F., Soós, G., & Varga, P. (2020). 5G-Enabled Autonomous Driving Demonstration with a V2X Scenario-in-the-Loop Approach. Sensors, 20(24), 7344. https://doi.org/10.3390/s20247344