Viaxl: A Solution of a Low-Cost Real-Time Visual Accelerometer Based on Laser Speckle Optical Flow Detection


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (a)
- Non-contact measurement, no additional mass, no effect on the properties of the measured structure.
- (b)
- Supports measurement of multiple points at the same time.
- (c)
- Supports measurement of difficult positions and tiny structures.
- (d)
- Not affected by the material properties and state of the tested structure.
- (e)
- Supports remote measurement.
- (f)
- It is low-cost and easy to apply.
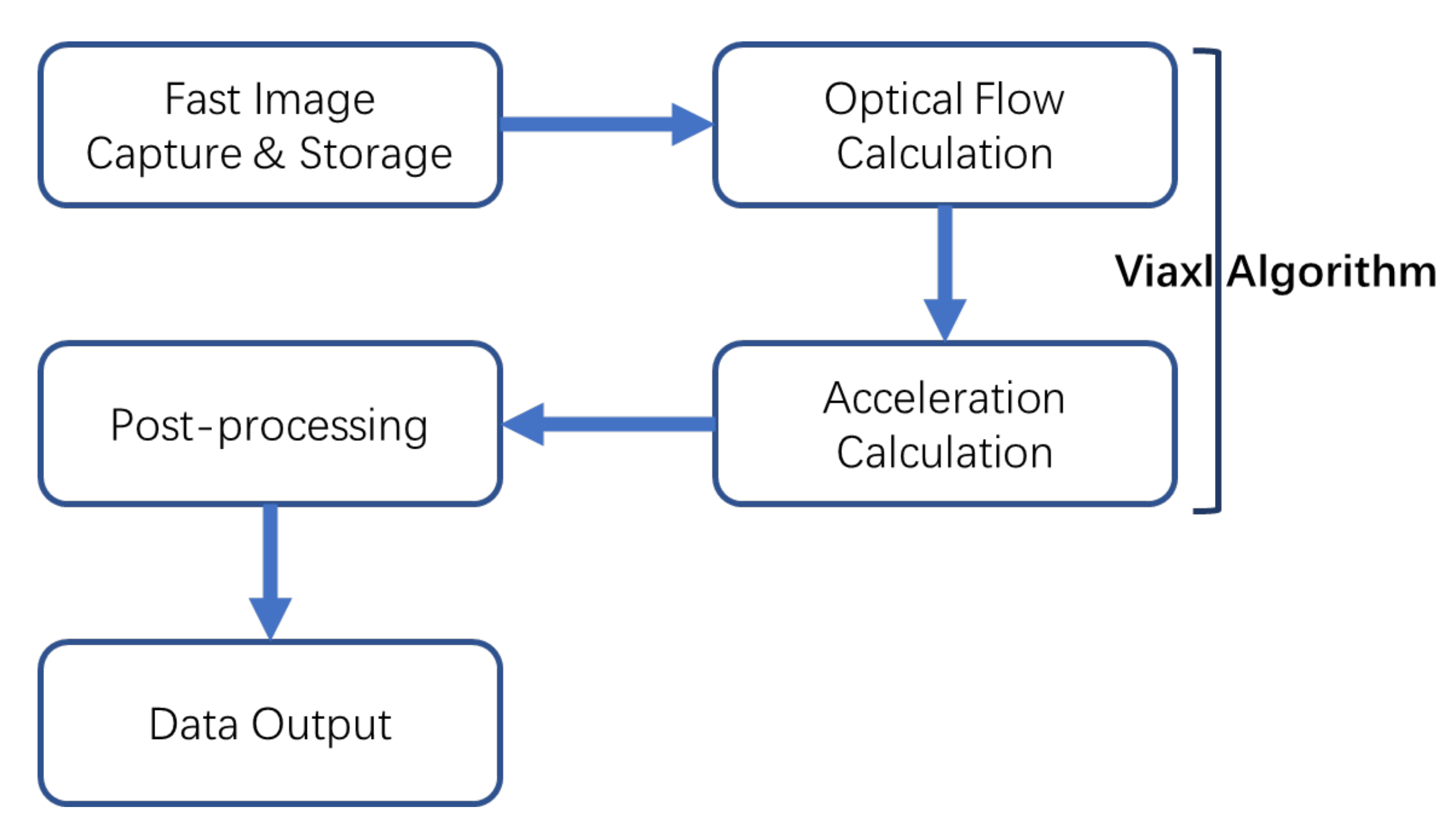
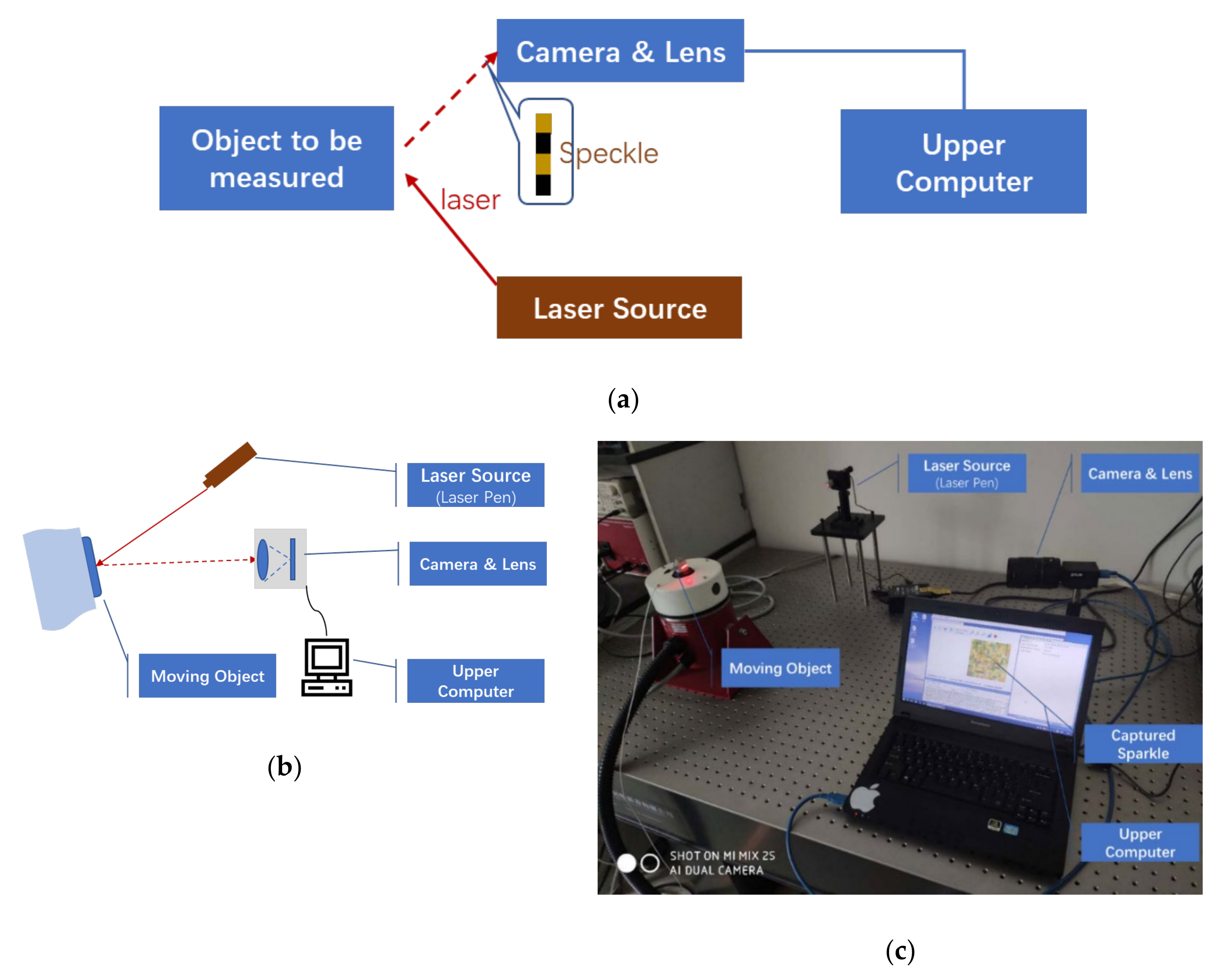
2. System Prototype
2.1. Acceleration Calculation Algorithm Based on Speckle Optical Flow Detection
2.2. Viaxl Prototype
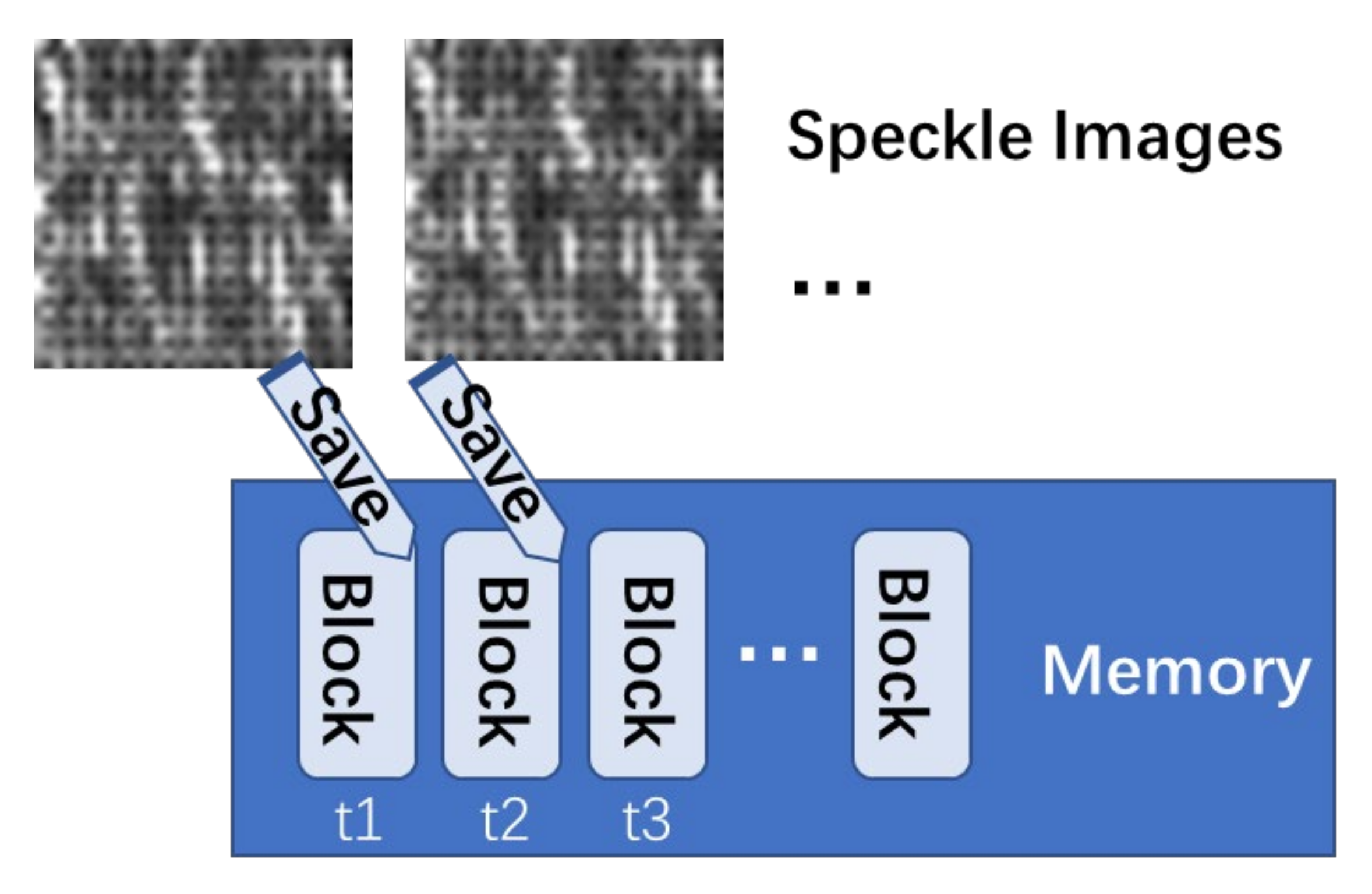
2.2.1. Fast Image Capture and Storage
2.2.2. Acceleration Calculation Based on the Viaxl Algorithm
2.2.3. Post-Processing
3. Experiment Results
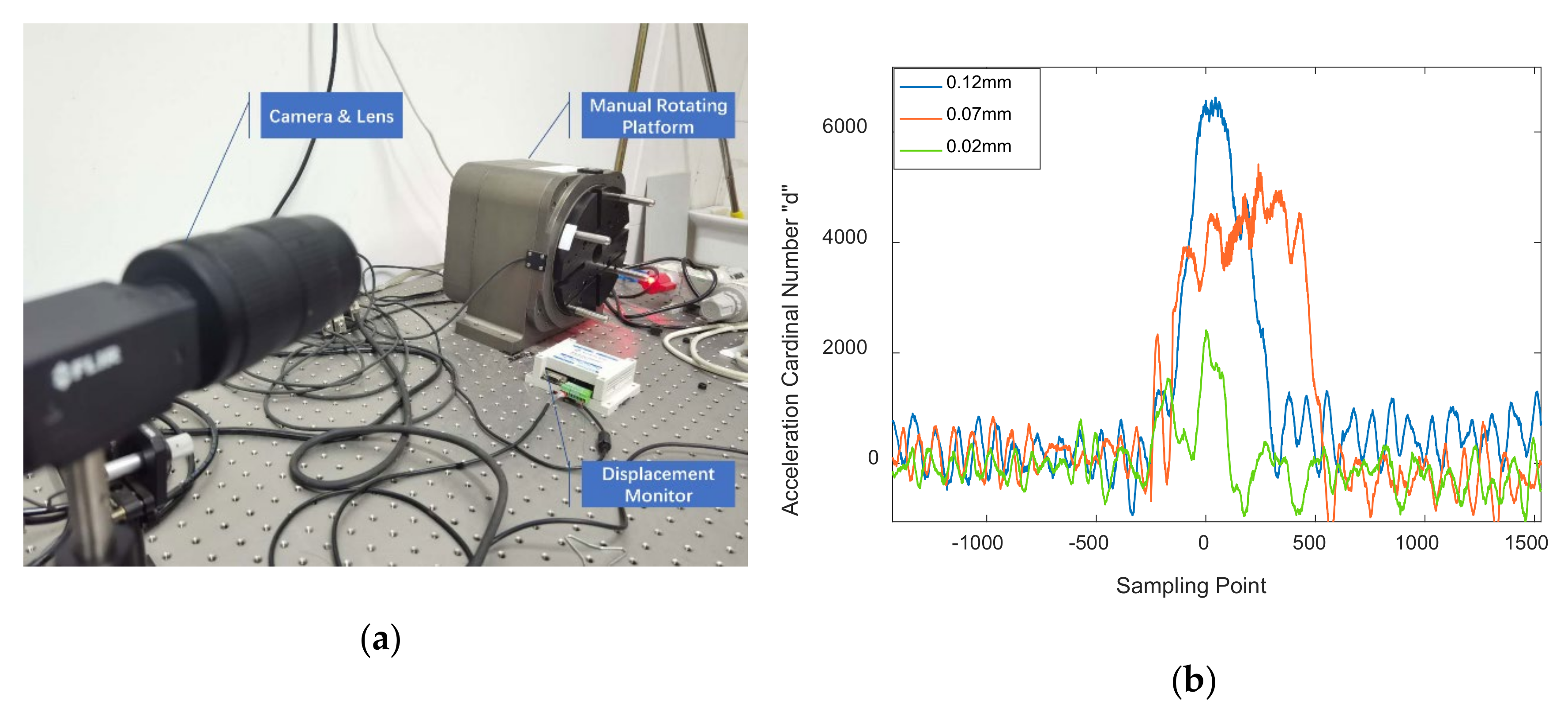
3.1. Hardware System
3.2. Experiment Results
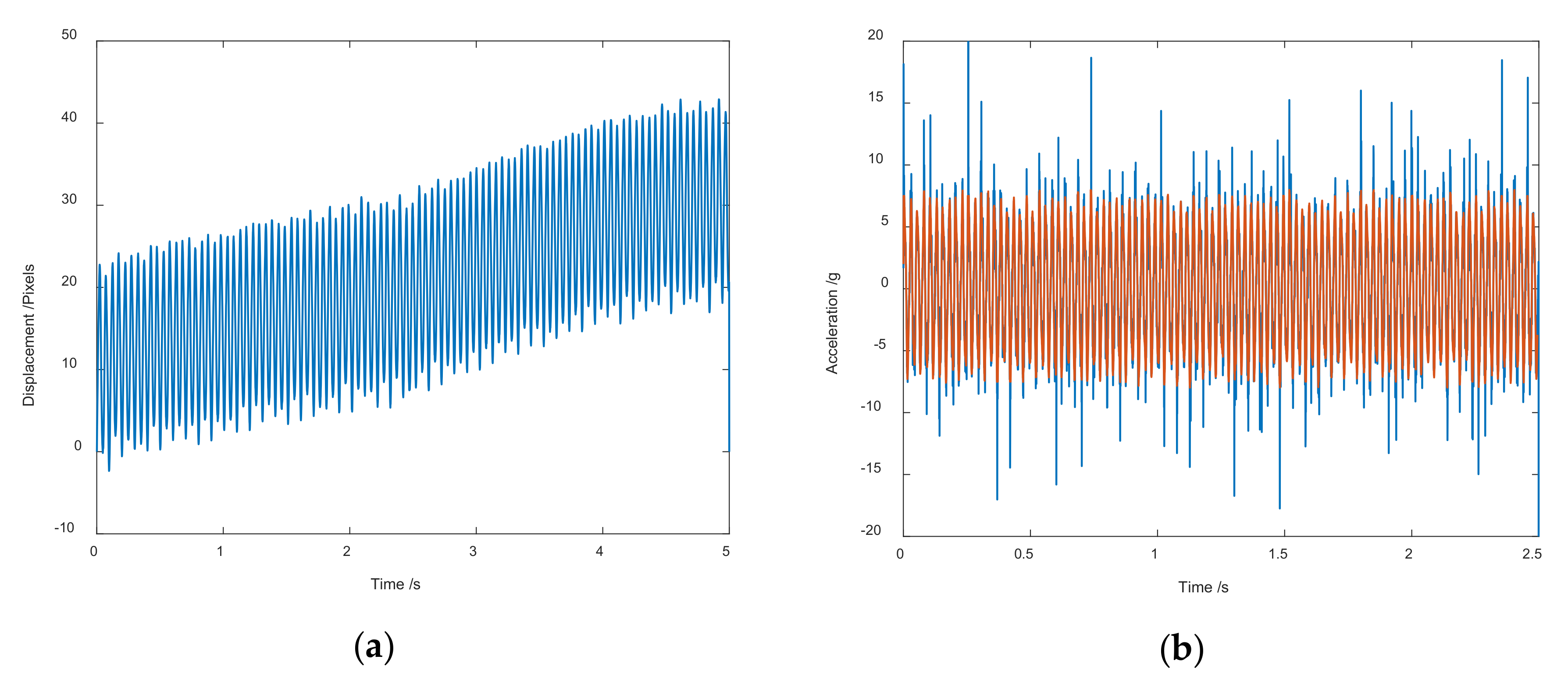
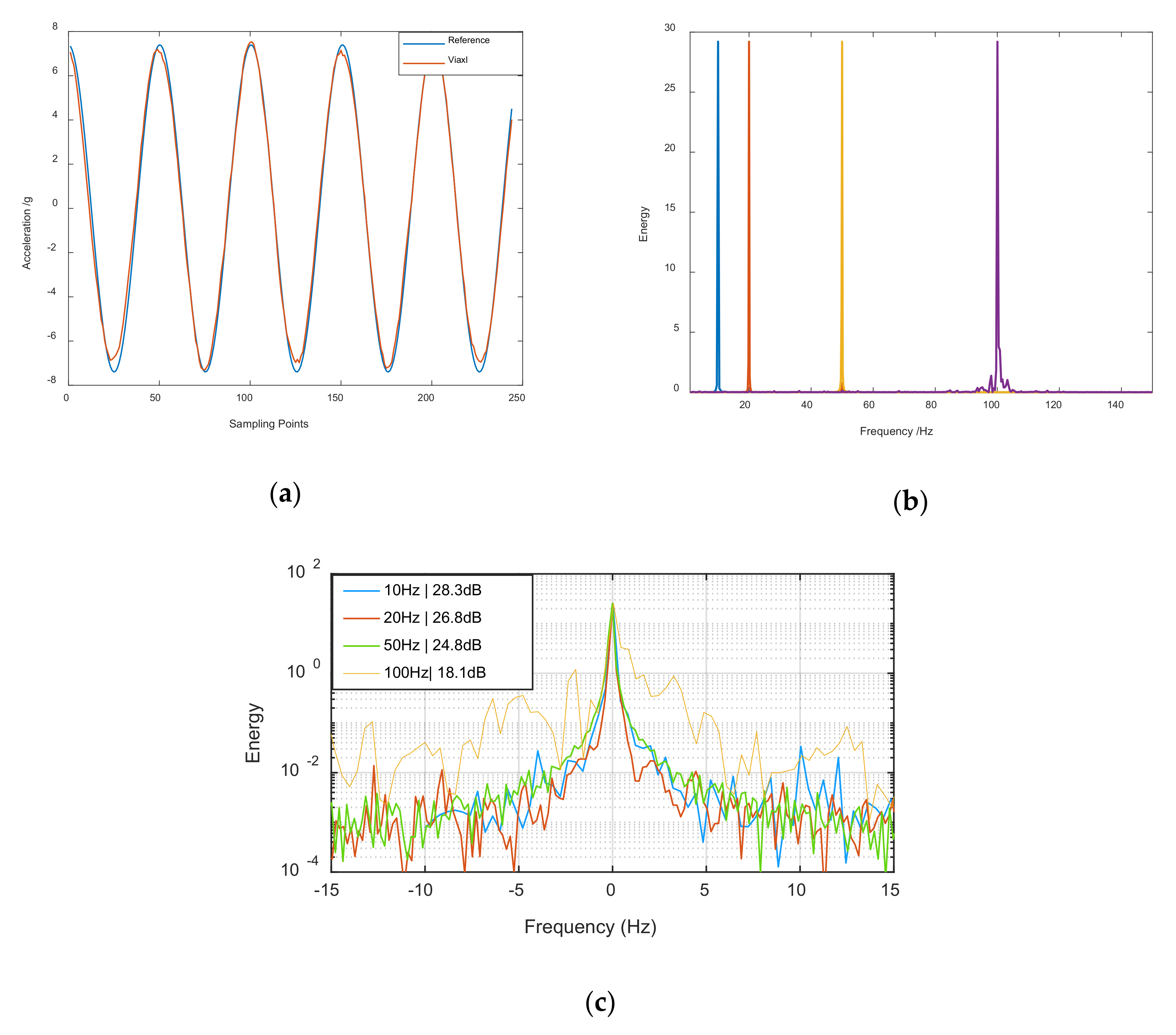
3.2.1. 10–100 Hz Acceleration Measurement Experiment
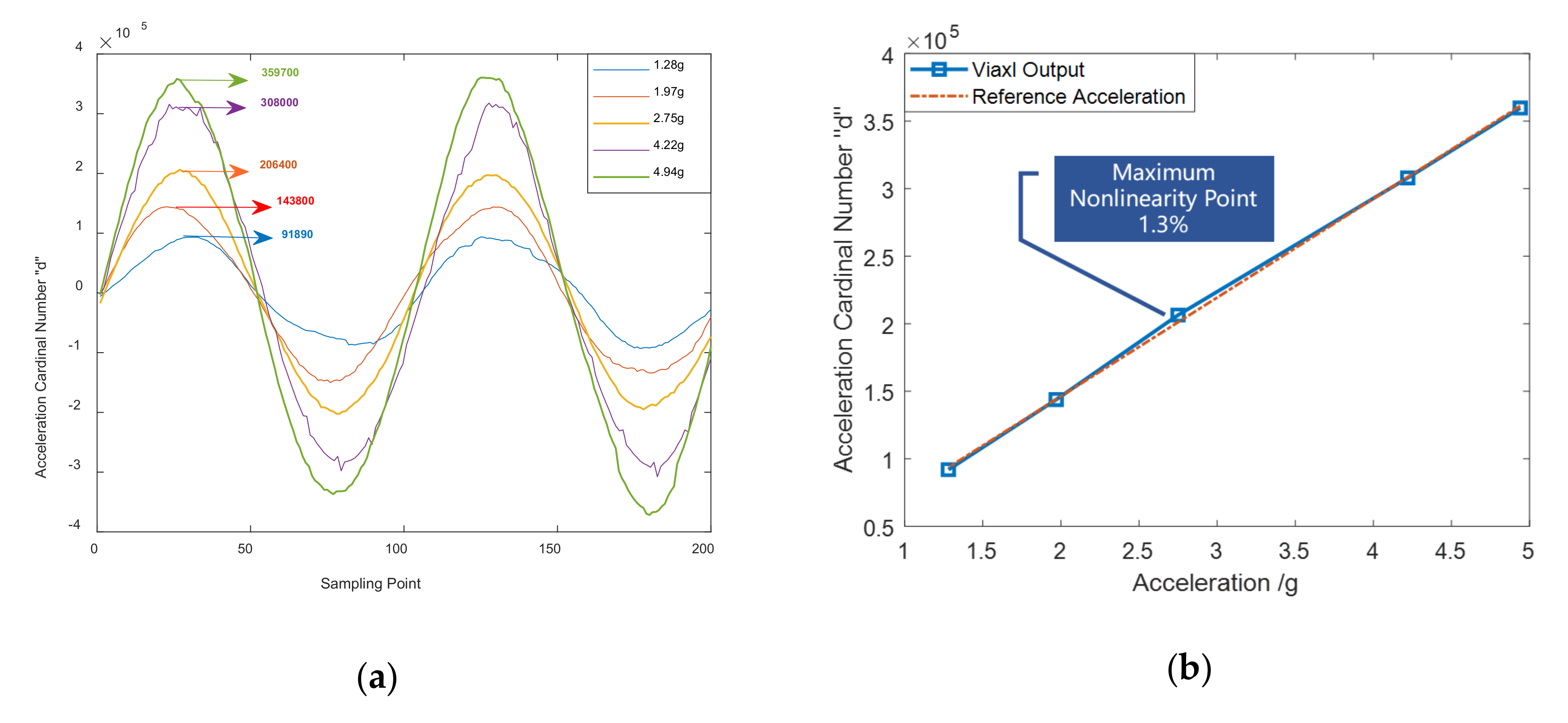
3.2.2. Nonlinearity of Acceleration Measurement
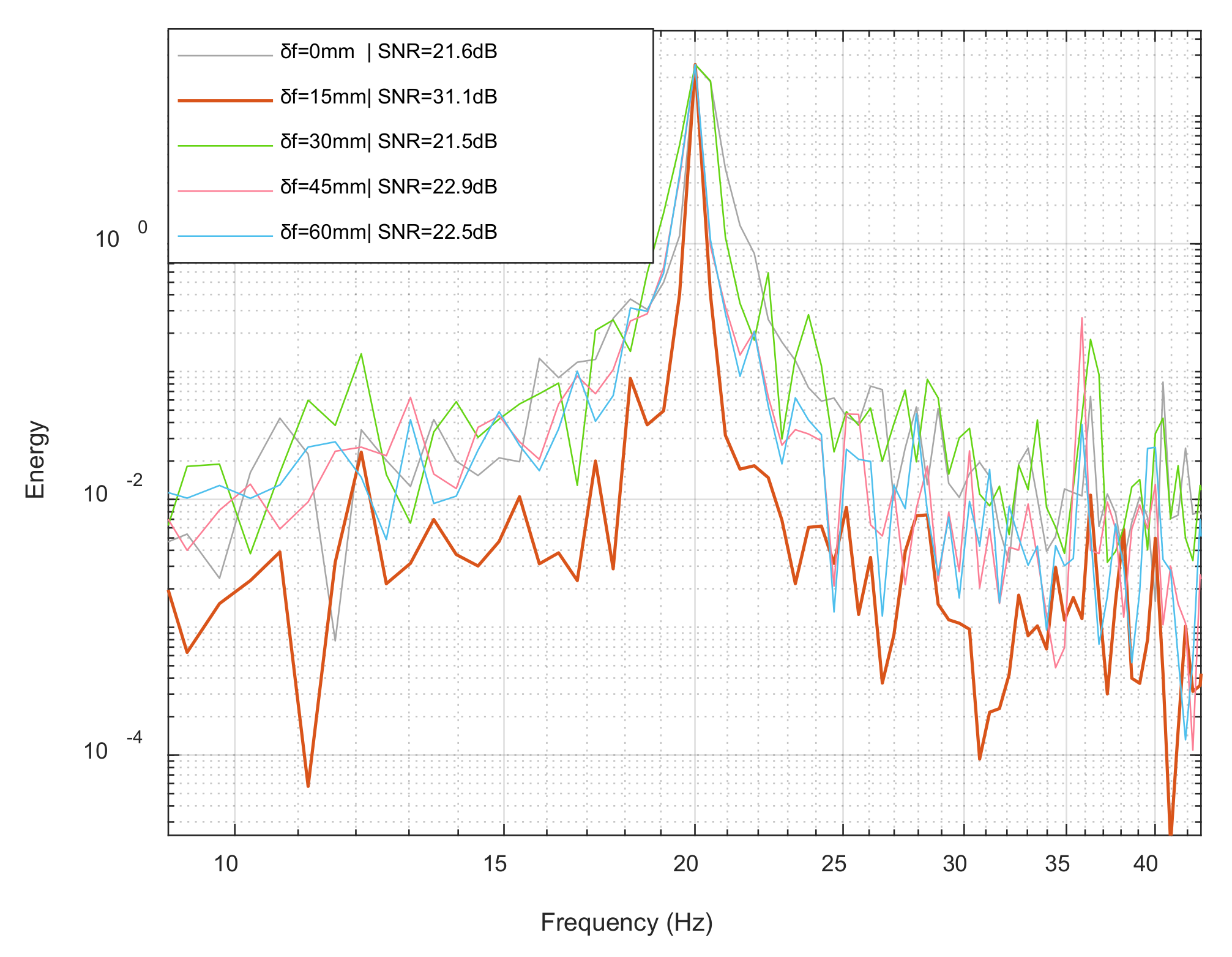
3.2.3. Defocus Effect of Viaxl
3.2.4. Minimum Detectable Amplitude
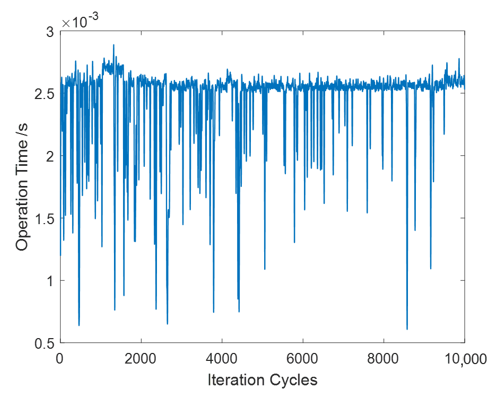
3.2.5. Real-Time Performance and Maximum Bandwidth of Detectable Vibration Frequency
4. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Lim, E.; Lee, H.; Myoung, H.-S.; Lee, K.-J. Development of a noncontact heart rate monitoring system for sedentary behavior based on an accelerometer attached to a chair. Physiol. Meas. 2015, 36, N61–N70. [Google Scholar] [CrossRef] [PubMed]
- Bjurström, H.; Ryden, N.; Birgisson, B. Non-contact surface wave testing of pavements: Comparing a rolling microphone array with accelerometer measurements. Smart Struct. Syst. 2016, 17, 1–15. [Google Scholar] [CrossRef]
- Goyal, D.; Choudhary, A.; Pabla, B.S.; Dhami, S.S. Support vector machines based non-contact fault diagnosis system for bearings. J. Intell. Manuf. 2019, 31, 1275–1289. [Google Scholar] [CrossRef]
- Goyal, D.; Dhami, S.S.; Pabla, B.S. Non-Contact Fault Diagnosis of Bearings in Machine Learning Environment. IEEE Sens. J. 2020, 20, 4816–4823. [Google Scholar] [CrossRef]
- Mahjoubfar, A.; Goda, K.; Ayazi, A.; Fard, A.M.; Kim, S.H.; Jalali, B. High-speed nanometer-resolved imaging vibrometer and velocimeter. Appl. Phys. Lett. 2011, 98, 101107. [Google Scholar] [CrossRef]
- Das, S.; Saha, A. Laser Beam Position-Dependent PSD-Based Calibrated Self-Vibration Compensated Noncontact Vibration Measurement System. IEEE Trans. Instrum. Meas. 2018, 68, 1–13. [Google Scholar] [CrossRef]
- Warren, C.; Niezrecki, C.; Avitabile, P.; Pingle, P. Comparison of FRF measurements and mode shapes determined using optically image based, laser, and accelerometer measurements. Mech. Syst. Signal Process. 2011, 25, 2191–2202. [Google Scholar] [CrossRef]
- Zabit, U.; Bernal, O.D.; Bosch, T. Design and Analysis of an Embedded Accelerometer Coupled Self-Mixing Laser Displacement Sensor. IEEE Sens. J. 2013, 13, 2200–2207. [Google Scholar] [CrossRef]
- Zhang, X.; Jing, Y.; Wang, W.; Chen, H.; Ma, Z.; Feng, J.; Guo, Z. Non-contact all-fiber optic laser Doppler accelerometer. Opt. Express 2019, 27, 19887–19895. [Google Scholar] [CrossRef] [PubMed]
- Sprecher, D.; Hof, C. Primary accelerometer calibration by scanning laser Doppler vibrometry. Meas. Sci. Technol. 2020, 31, 065006. [Google Scholar] [CrossRef]
- Longo, R.; Vanlanduit, S.; Arroud, G.; Guillaume, P. Underwater Acoustic Wavefront Visualization by Scanning Laser Doppler Vibrometer for the Characterization of Focused Ultrasonic Transducers. Sensors 2015, 15, 19925–19936. [Google Scholar] [CrossRef] [PubMed]
- Thompson, C.A.; Webb, K.J.; Weiner, A.M. Imaging in scattering media by use of laser speckle. J. Opt. Soc. Am. A 1997, 14, 2269–2277. [Google Scholar] [CrossRef]
- Jo, K.; Gupta, M.; Nayar, S.K. SpeDo: 6 DOF Ego-Motion Sensor Using Speckle Defocus Imaging. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Las Condes, Chile, 7–13 December 2015; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2015; pp. 4319–4327. [Google Scholar]
- Calzetti, G.; Fondi, K.; Bata, A.M.; Luft, N.; Wozniak, P.A.; Witkowska, K.J.; Bolz, M.; Popa-Cherecheanu, A.; Werkmeister, R.M.; Schmidl, D.; et al. Assessment of choroidal blood flow using laser speckle flowgraphy. Br. J. Ophthalmol. 2018, 102, 1679–1683. [Google Scholar] [CrossRef] [PubMed]
- Fan, Y.-Y.; Bai, G.-L.; Zhu, Y.-F.; Ou, Q.; Zhou, L.; Bi, A.-R.; Fu, X.-G.; Shen, S.; Wei, H. Laser speckle formed disordered micro-meander structures for light extraction enhancement of flexible organic light-emitting diodes. Opt. Express 2018, 26, 20420–20429. [Google Scholar] [CrossRef] [PubMed]
- Wu, N.; Haruyama, S. Real-time Sound Detection and Regeneration Based on Optical Flow Algorithm of Laser Speckle Images. In Proceedings of the 2019 28th Wireless and Optical Communications Conference (WOCC), Beijing, China, 9–10 May 2019; Institute of Electrical and Electronics Engineers (IEEE)): New York, NY, USA, 2019; pp. 1–4. [Google Scholar]
- Lowhur, A.; Chuah, M.C. Dense Optical Flow Based Emotion Recognition Classifier. In Proceedings of the 2015 IEEE 12th International Conference on Mobile Ad Hoc and Sensor Systems, Dallas, TX, USA, 19–22 October 2015; Institute of Electrical and Electronics Engineers (IEEE)): New York, NY, USA, 2015; pp. 573–578. [Google Scholar]
- Gow, R.; Renshaw, D.; Findlater, K.; Grant, L.; McLeod, S.; Hart, J.; Nicol, R. A Comprehensive Tool for Modeling CMOS Image-Sensor-Noise Performance. IEEE Trans. Electron Devices 2007, 54, 1321–1329. [Google Scholar] [CrossRef]
- Wu, N.; Haruyama, S. Real-time audio detection and regeneration of moving sound source based on optical flow algorithm of laser speckle images. Opt. Express 2020, 28, 4475–4488. [Google Scholar] [CrossRef] [PubMed]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Yang, W.; Xiong, X.; Wang, Z.; Zou, X. Viaxl: A Solution of a Low-Cost Real-Time Visual Accelerometer Based on Laser Speckle Optical Flow Detection. Sensors 2020, 20, 7033. https://doi.org/10.3390/s20247033
Li Z, Yang W, Xiong X, Wang Z, Zou X. Viaxl: A Solution of a Low-Cost Real-Time Visual Accelerometer Based on Laser Speckle Optical Flow Detection. Sensors. 2020; 20(24):7033. https://doi.org/10.3390/s20247033
Chicago/Turabian StyleLi, Zhitian, Wuhao Yang, Xingyin Xiong, Zheng Wang, and Xudong Zou. 2020. "Viaxl: A Solution of a Low-Cost Real-Time Visual Accelerometer Based on Laser Speckle Optical Flow Detection" Sensors 20, no. 24: 7033. https://doi.org/10.3390/s20247033
APA StyleLi, Z., Yang, W., Xiong, X., Wang, Z., & Zou, X. (2020). Viaxl: A Solution of a Low-Cost Real-Time Visual Accelerometer Based on Laser Speckle Optical Flow Detection. Sensors, 20(24), 7033. https://doi.org/10.3390/s20247033