Low-Temperature Properties of the Magnetic Sensor with Amorphous Wire

 ,
,
Abstract
1. Introduction
2. Methods
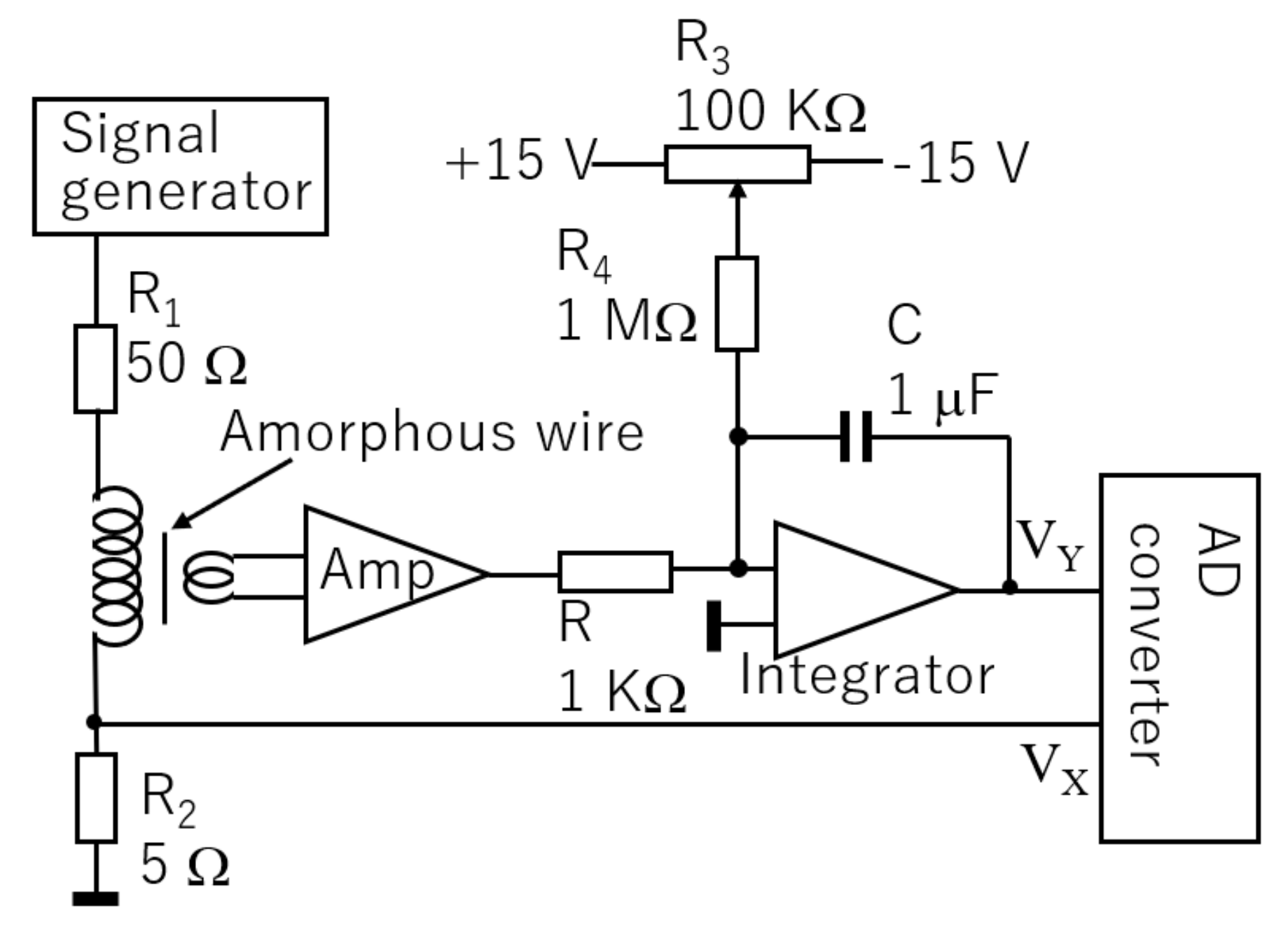
2.1. Measuring the Magnetic Hysteresis Loop (B–H Characteristics) of the FeCoSiB Amorphous Wire
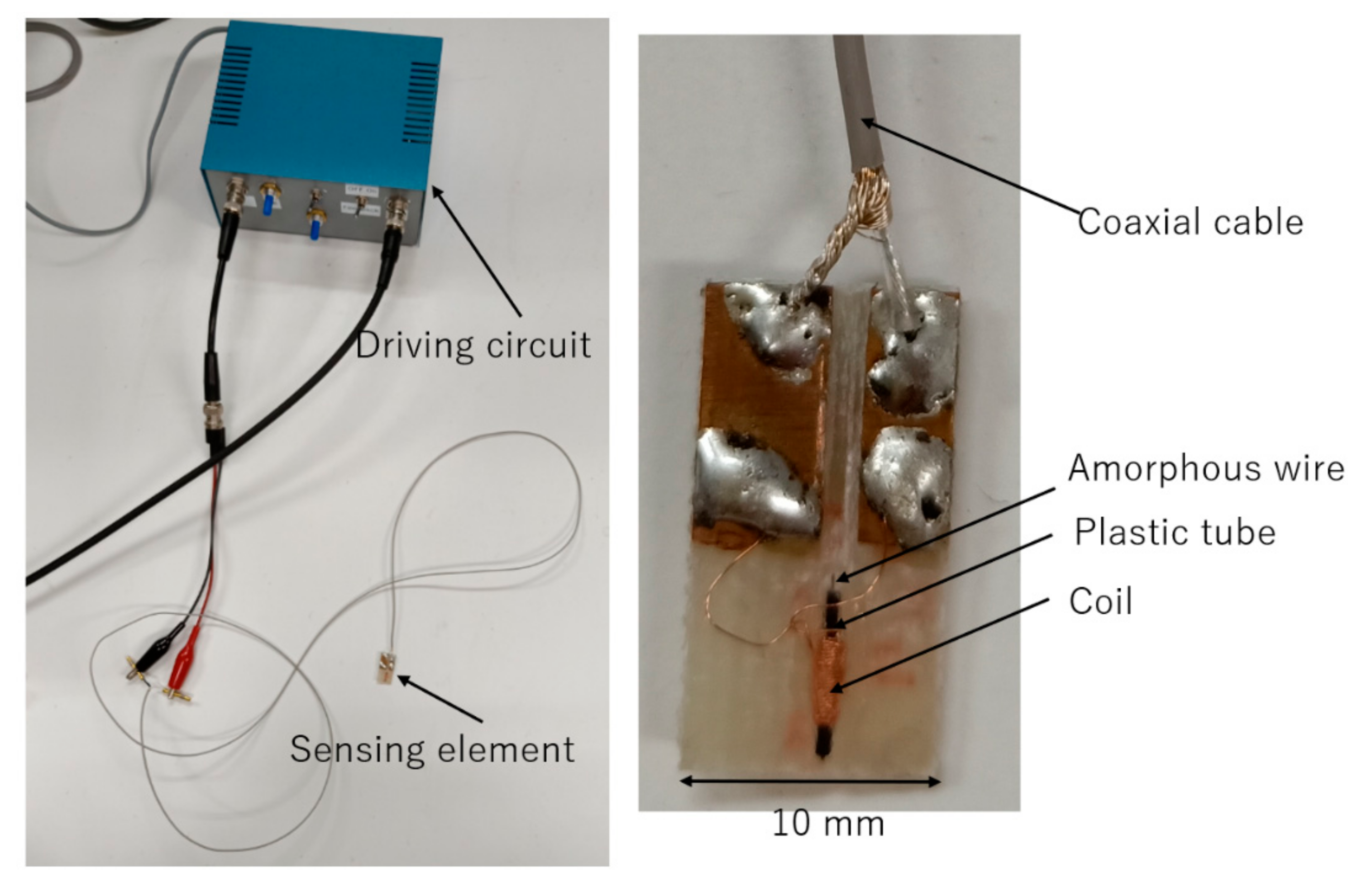
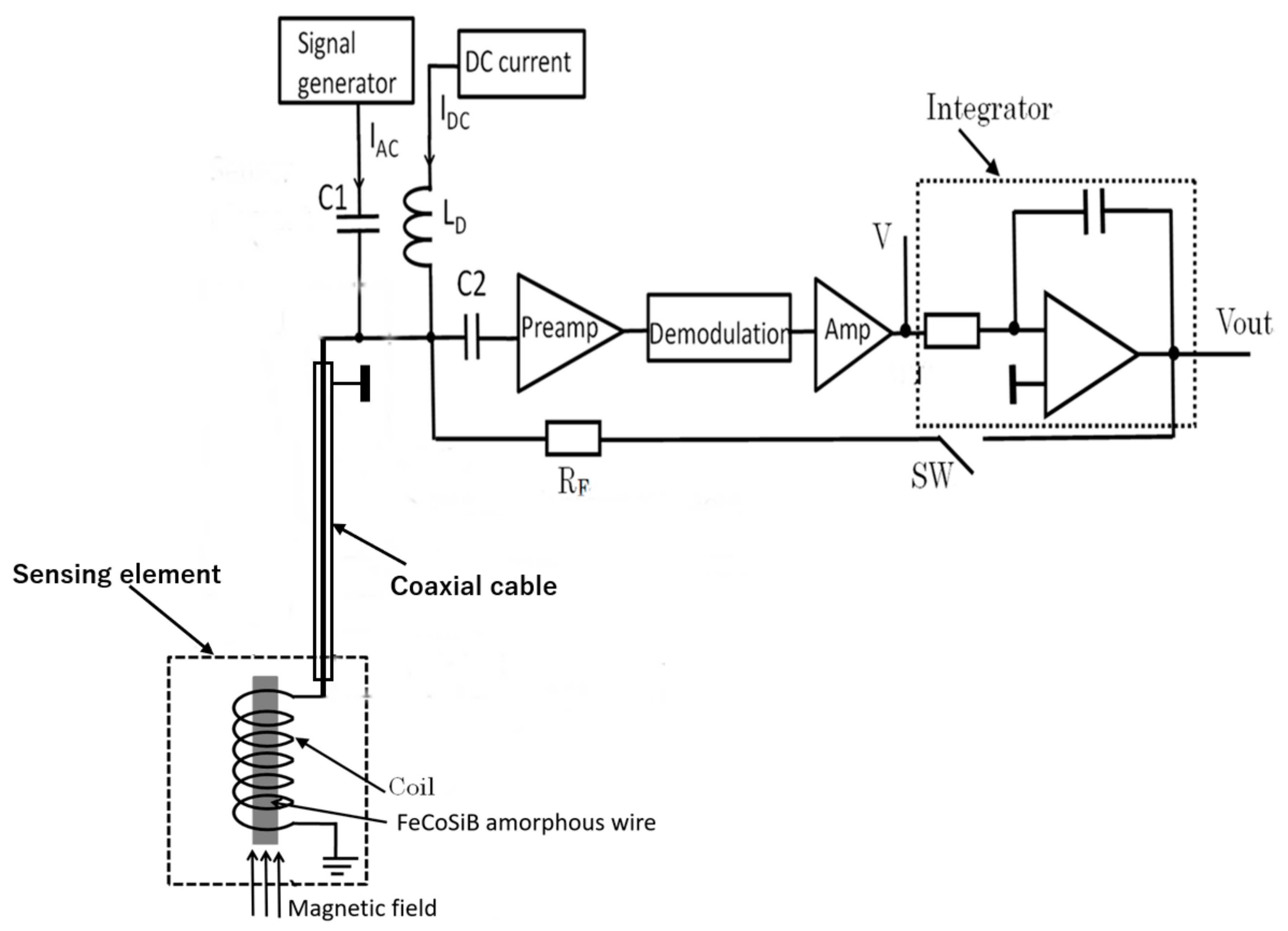
2.2. Magnetic Sensor with FeCoSiB Amorphous Wire
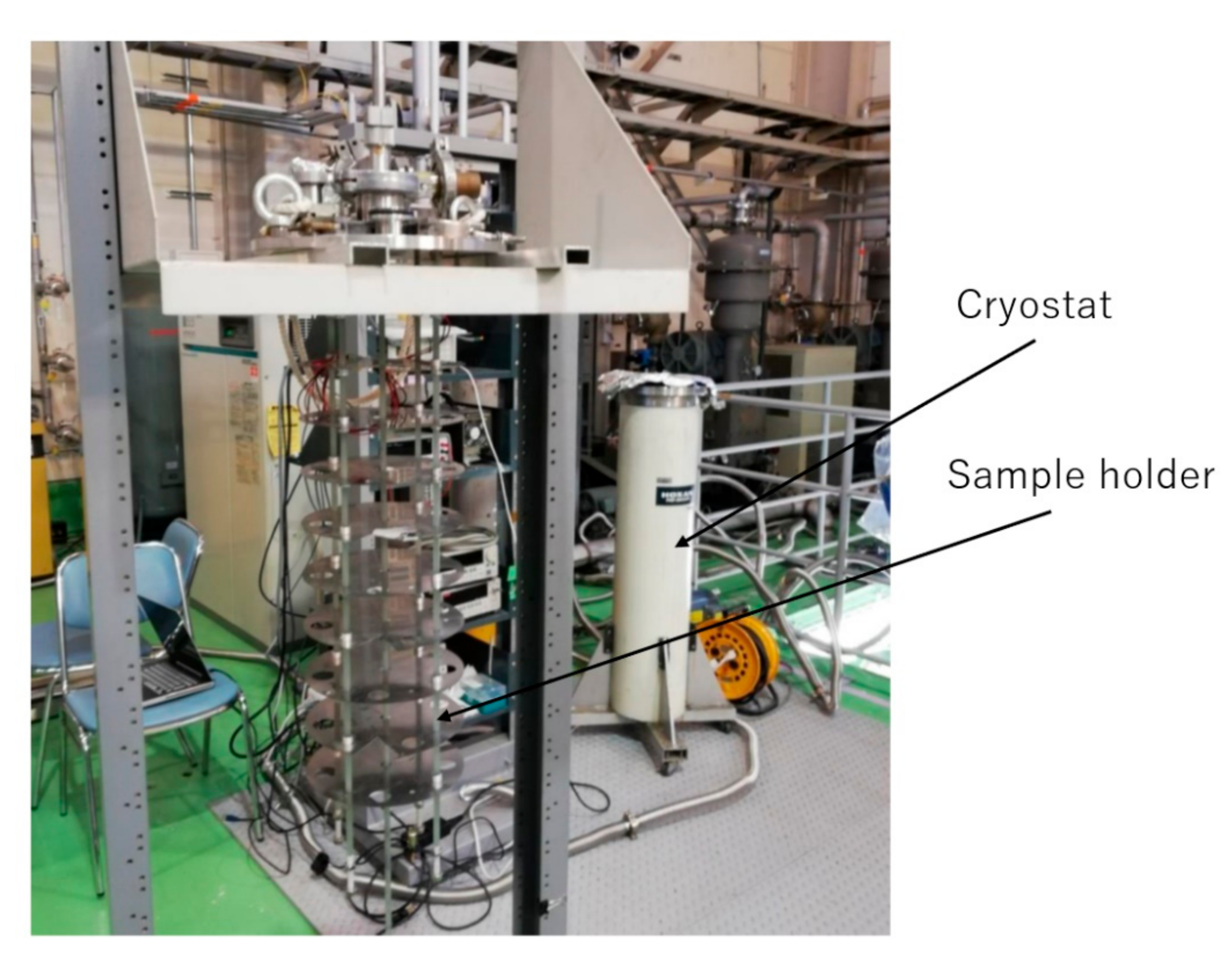
2.3. Experiments at Liquid Helium Temperature
3. Results
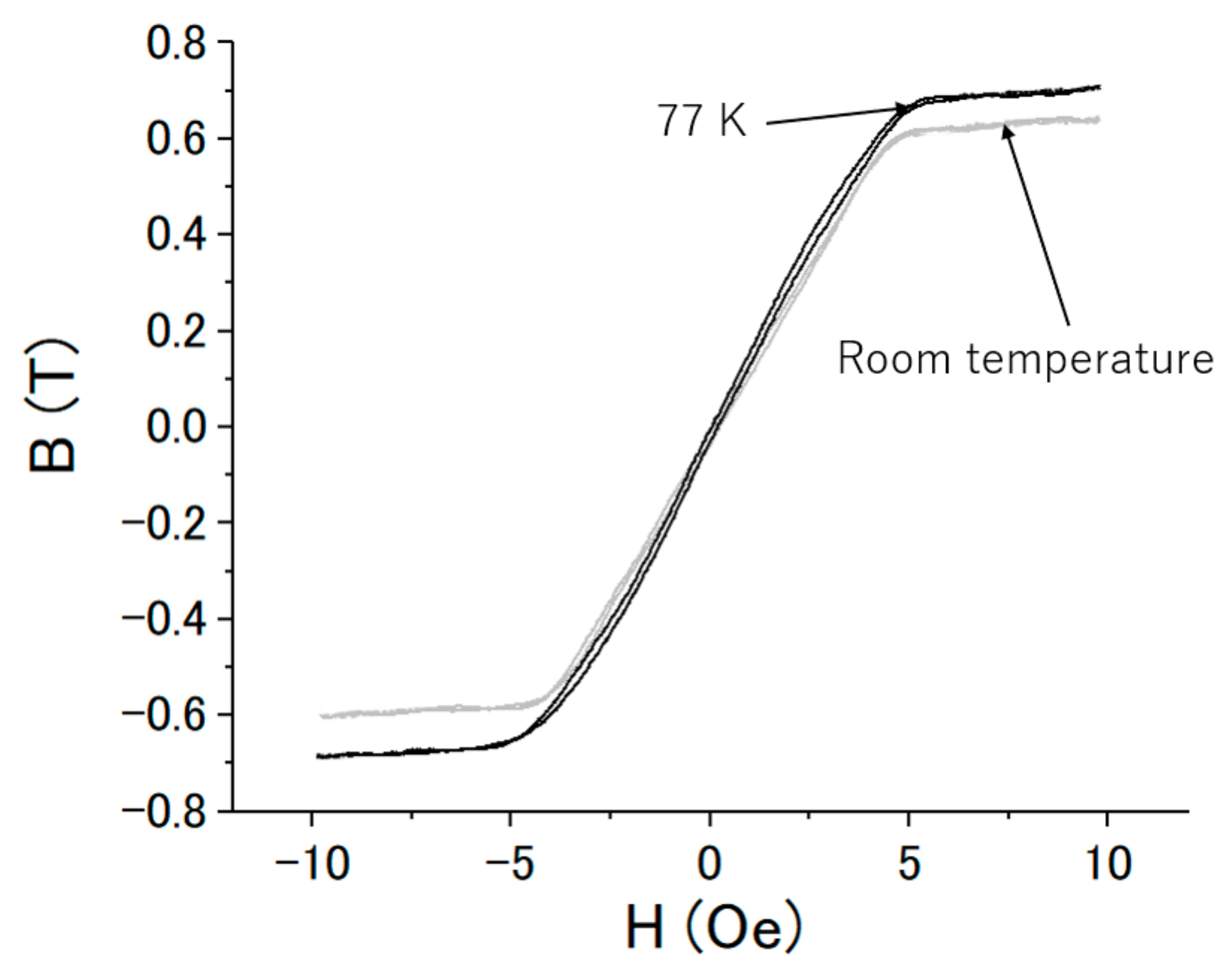
3.1. Magnetiztion Characteristics of the FeCoSiB Amorphous Wire
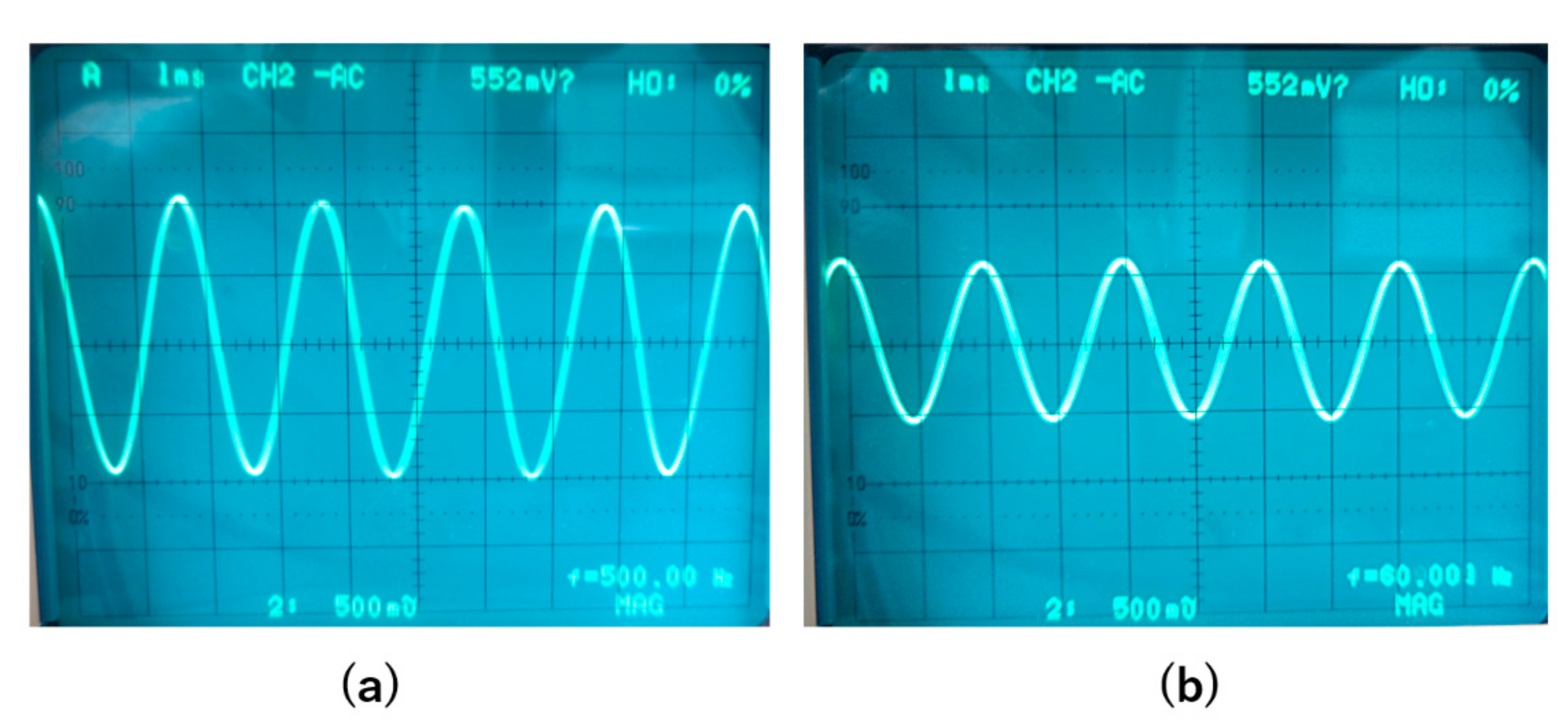
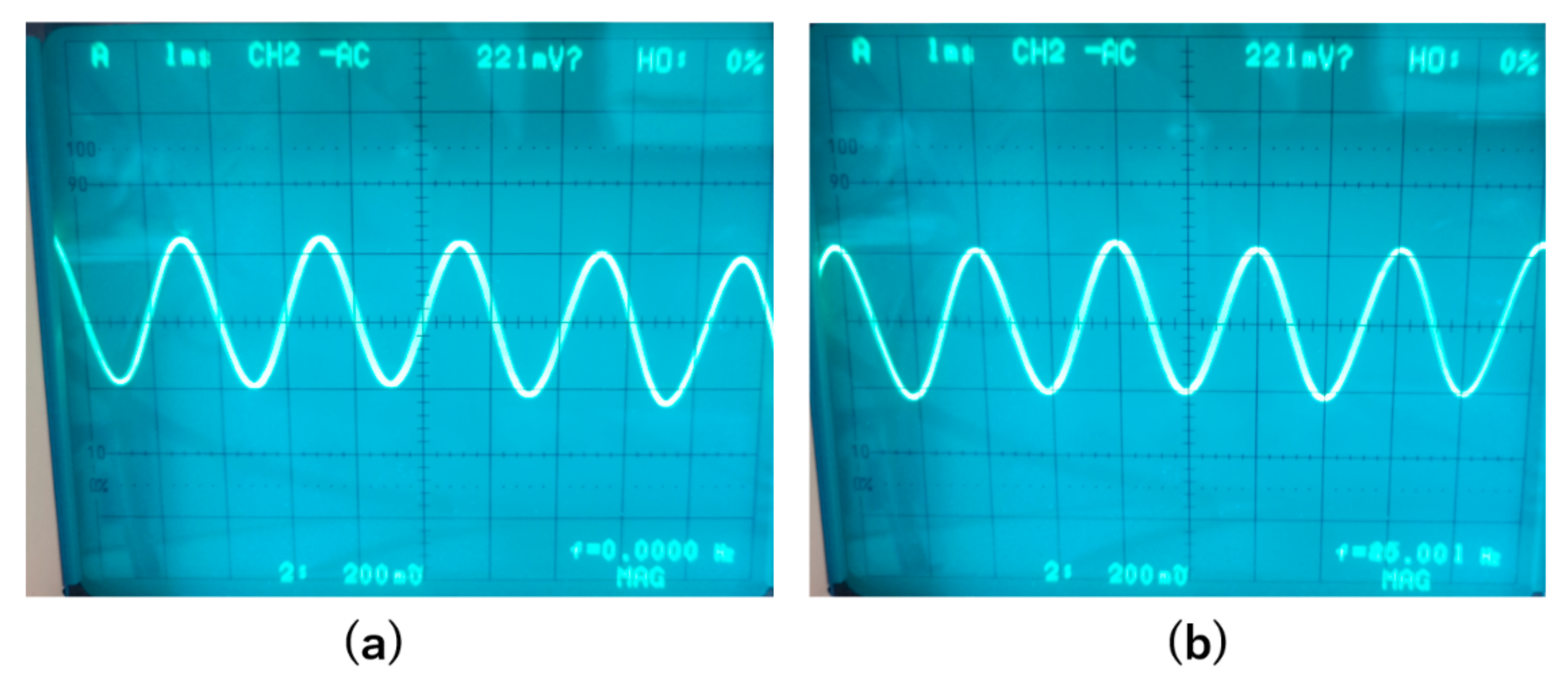
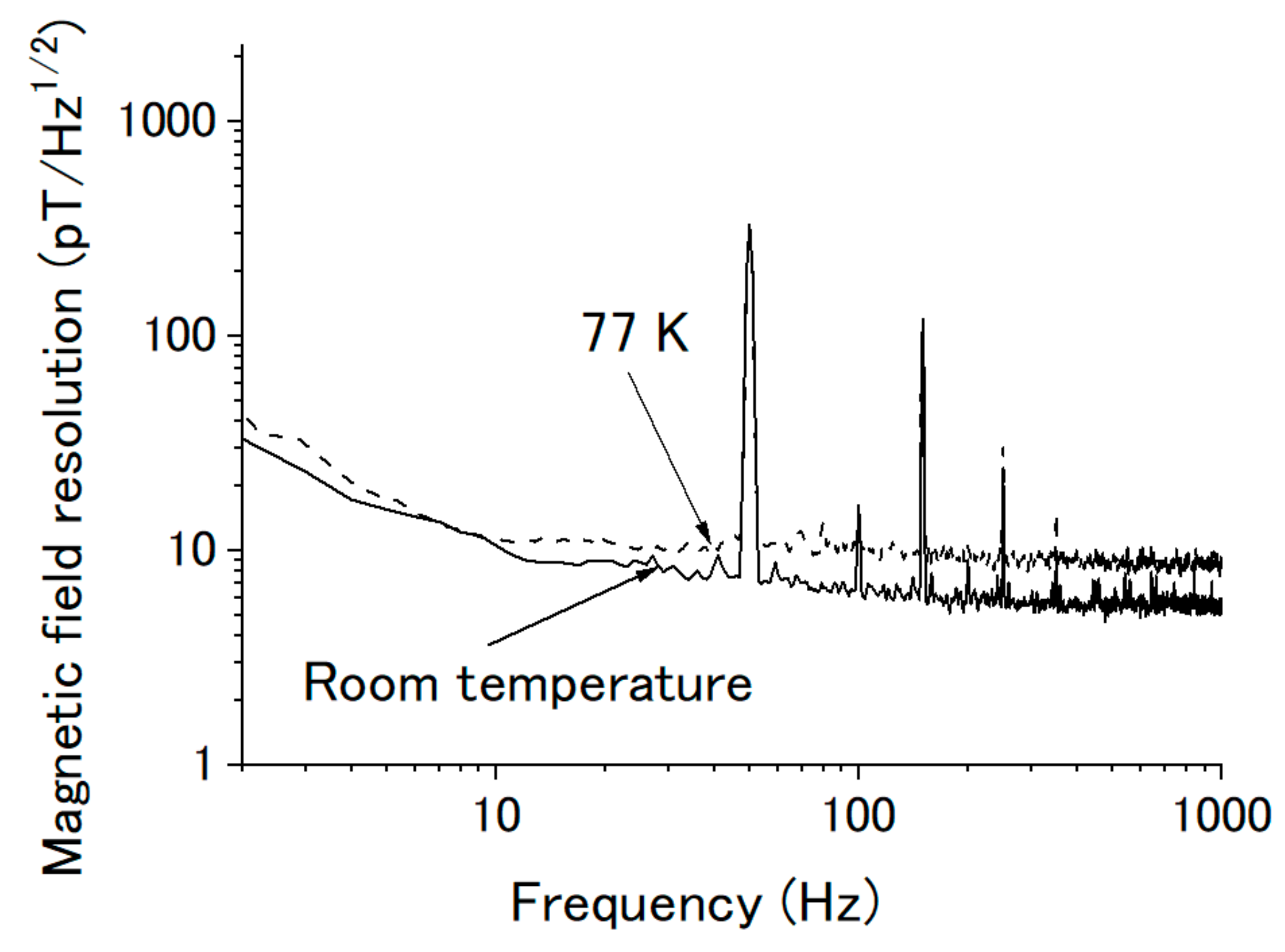
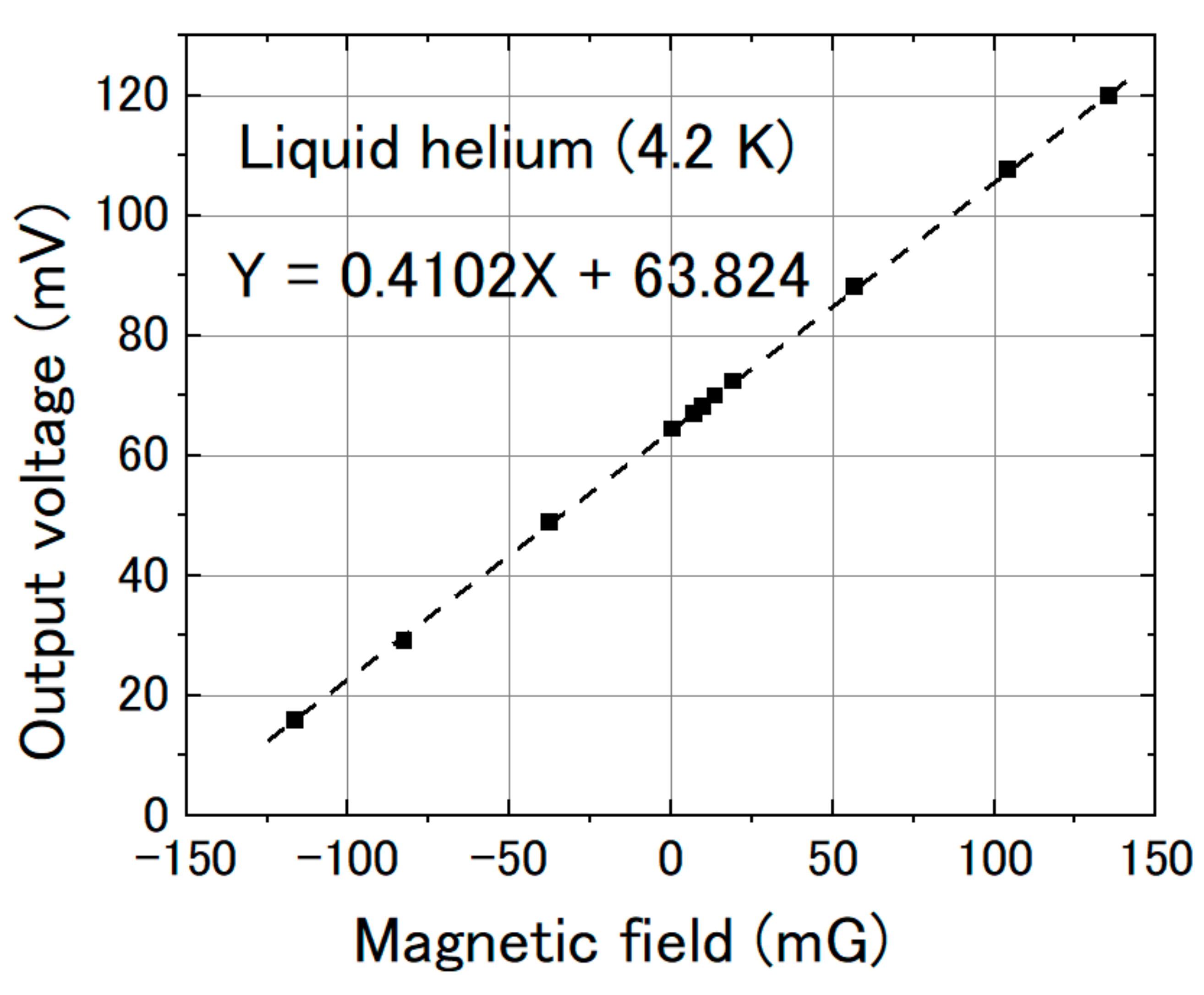
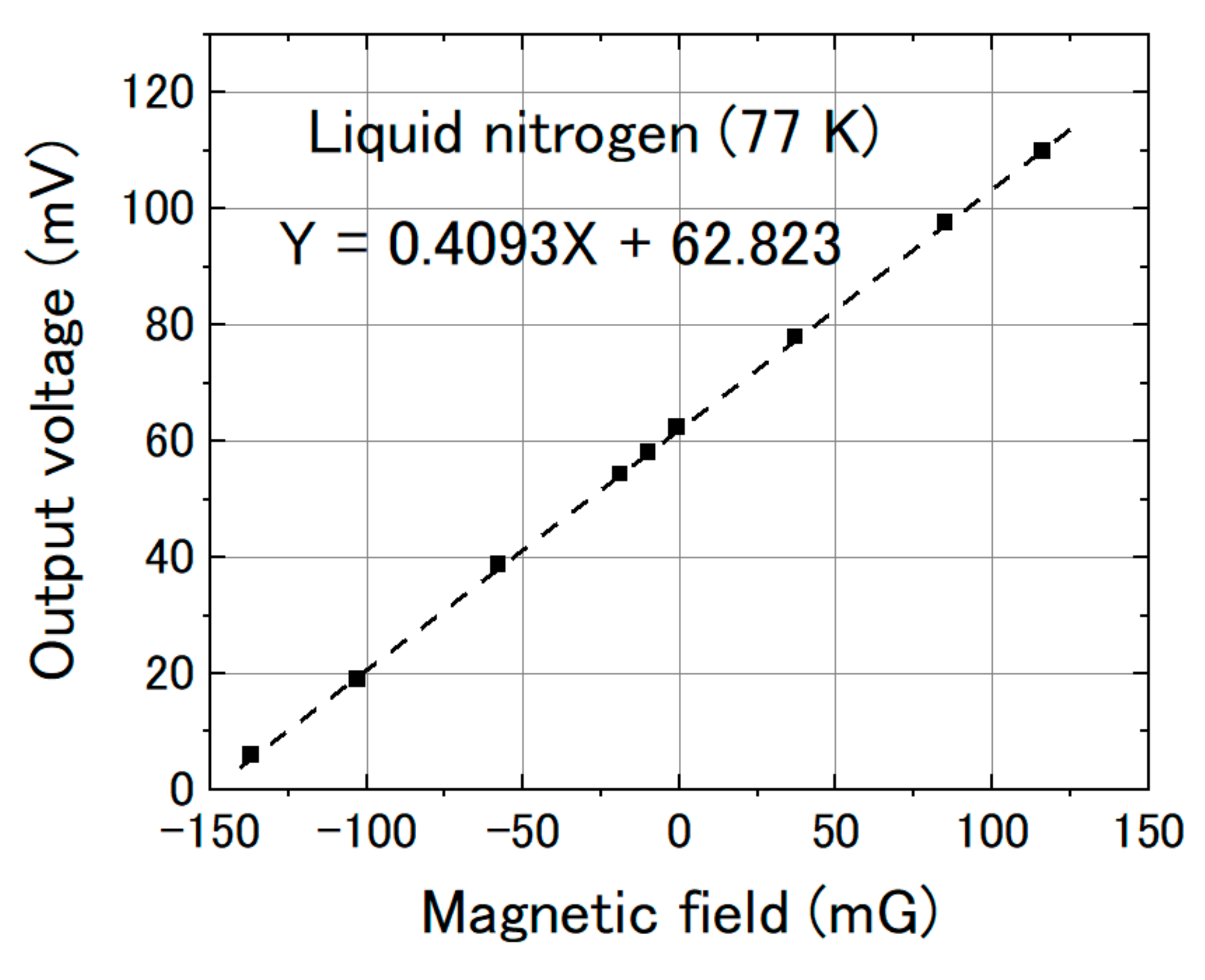
3.2. Signal Amplitudes at Room Temperature and Liquid Nitrogen Temperature
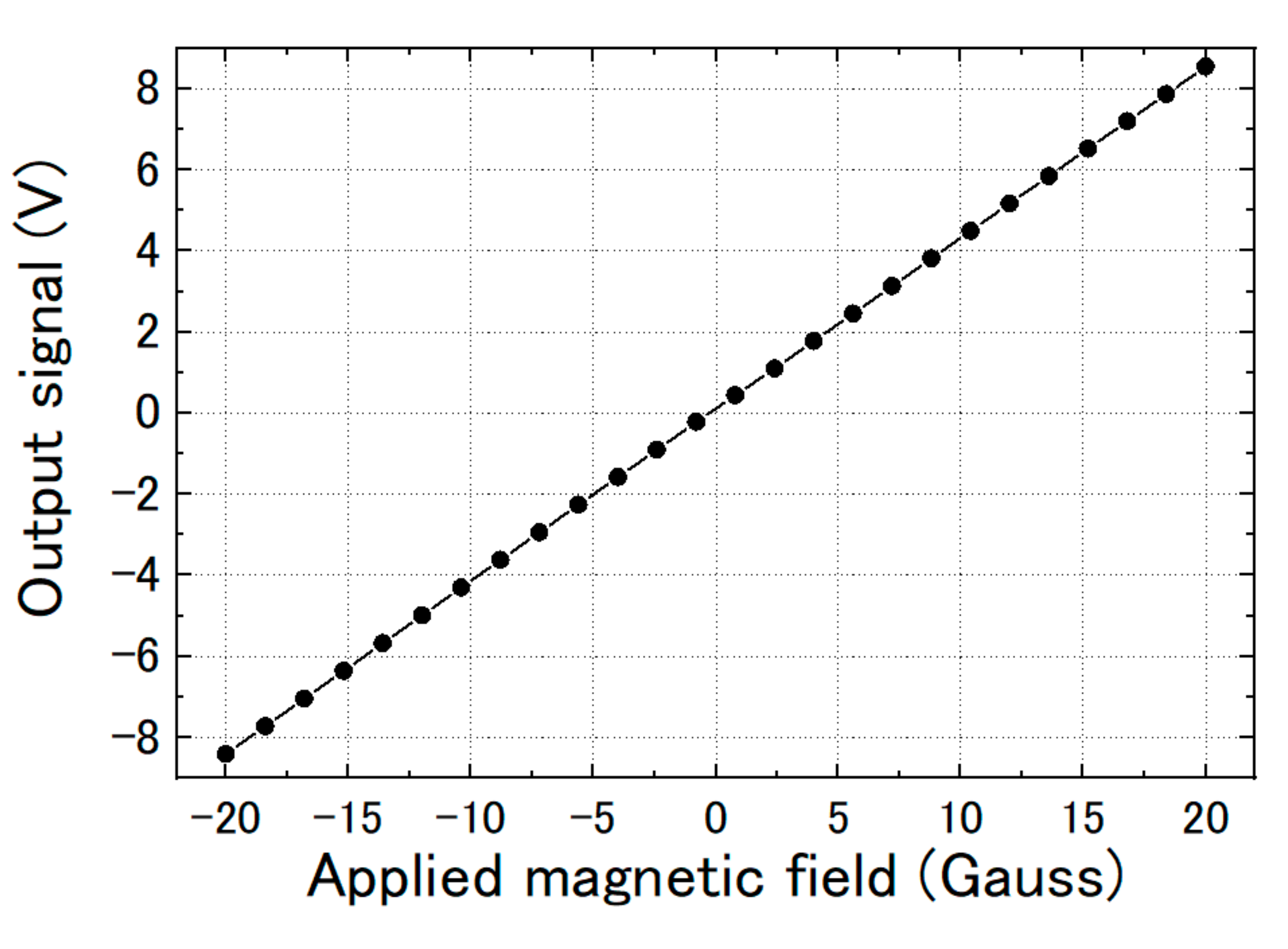
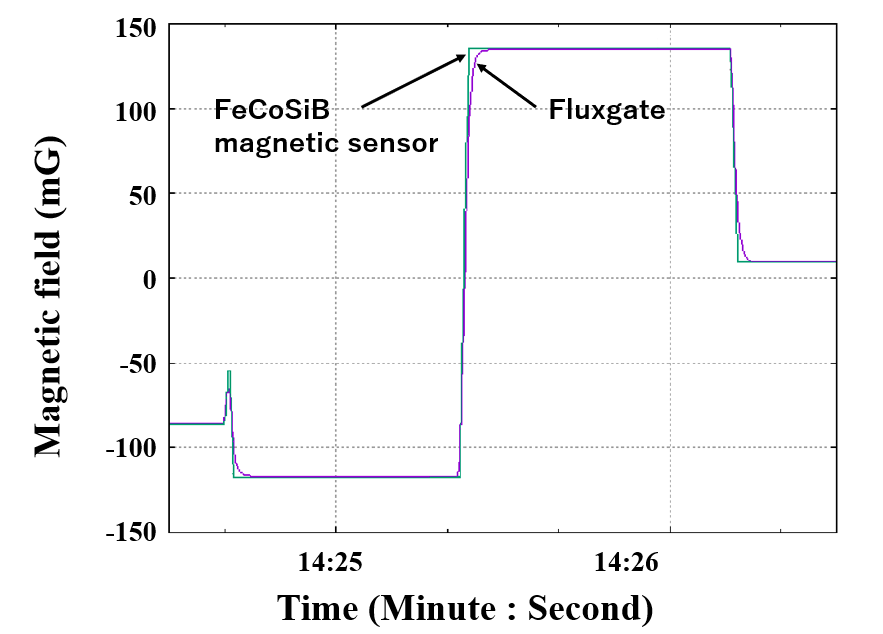
3.3. Magnetic Response of the FeCoSiB Magnetic Sensor
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Posen, S.; Checchin, M.; Crawford, A.C.; Grassellino, A.; Martinello, M.; Melnychuk, O.S.; Romanenko, A.; Sergatskov, D.A.; Trenikhina, Y. Efficient expulsion of magnetic flux in superconducting radiofrequency cavities for high Q0 applications. J. Appl. Phys. 2016, 119, 213903. [Google Scholar] [CrossRef]
- Schmitz, B.; Koeszegi, J.; Kugeler, O.; Knobloch, J. Magnetometric mapping of superconducting RF cavities. Rev. Sci. Instrum. 2019, 89, 054706. [Google Scholar] [CrossRef] [PubMed]
- Clem, T.R.; Froelich, M.C.; Overway, D.J.; Purpura, J.W.; Wiegert, R.F.; Koch, R.H.; Lathrop, D.K.; Rozen, J.; Eraker, J.H.; Schmidt, J.M. Advances in sensor development and demonstration of superconducting gradiometers for mobile operation. IEEE Trans. Appl. Supercond. 1997, 7, 3287–3293. [Google Scholar] [CrossRef]
- Radparvar, M. A wide dynamic range single-chip SQUID magnetometer. IEEE Trans. Appl. Supercond. 1994, 4, 87–91. [Google Scholar] [CrossRef]
- Jakub, J.; Semir, E.-A.; Maciej, O. Hall sensors for extreme temperatures. Sensors 2011, 11, 876–885. [Google Scholar]
- Ruslan, R.; Jens, H.; Christian, H. New type of fluxgate magnetometer for the heart’s magnetic elds detection. Curr. Direct. Biomed. Eng. 2015, 1, 22–25. [Google Scholar]
- Barbieri, F.; Trauchessec, V.; Caruso, L.; Trejo-Rosillo, J.; Telenczuk, B.; Paul, E.; Bal, T.; Destexhe, A.; Fermon, C.; Pannetier-Lecoeur, M.; et al. Local recording of biological magnetic fields using Giant Magneto Resistance-based micro-probes. Sci. Rep. 2016, 6, 39330. [Google Scholar] [CrossRef]
- Honkura, Y. The development of MI sensor and its applications to mobile phone. In Proceedings of the 2012 Advanced Electromagnetics Symposium (AES2012), Paris, France, 16 April 2012. [Google Scholar]
- Postolache, O.; Ramos, H.G.; Ribeiro, A. Lopes. GMR array uniform eddy current probe for defect detection in conductive specimens. Measurement 2013, 46, 4369–4378. [Google Scholar] [CrossRef]
- He, D.F.; Shiwa, M.; Jia, J.P.; Takatsubo, J.; Moriya, S. Multi-frequency ECT with AMR sensor. NDT E Int. 2011, 44, 438–441. [Google Scholar] [CrossRef]
- Treutler, C.P.O. Magnetic sensors for automotive applications. Sens. Actuat. A Phys. 2001, 91, 2–6. [Google Scholar] [CrossRef]
- Ando, B.; Baglio, S.; Bulsara, A.R.; Trigona, C. Design and characterization of a microwire fluxgate magnetometer. Sens. Actuat. 2009, 151, 145–153. [Google Scholar] [CrossRef]
- Uchaikin, S.V. Fluxgate magnetometer for cryogenics. In 21st International Conference on Low Temperature Physics; Institute of Physics, Academy of Sciences of the Czech Republic: Prague, Czech Republic, 1996; pp. 2809–2810. [Google Scholar]
- Okada, T.; Kako, E.; Konomi, T.; Masuzawa, M.; Sakai, H.; Tsuchiya, K.; Ueki, R.; Umemori, K.; Tajima, T.; Poudel, A. Development of temperature and magnetic field mapping system for superconducting cavities at KEK. In Proceedings of the 19th International Conference on RF Superconductivity, Dresden, Germany, 30 June–5 July 2019; pp. 583–585. [Google Scholar]
- Martinet, G. Characterization of small AMR sensors in liquid helium to measure residual magnetic field on superconducting. In Proceedings of the 19th International Conference on RF Superconductivity, Dresden, Germany, 30 June–5 July 2019; pp. 576–579. [Google Scholar]
- Chen, J.; Li, J.; Li, Y.; Chen, Y.; Xu, L. Design and fabrication of a miniaturized GMI magnetic sensor based on amorphous wire by MEMS technology. Sensors 2018, 18, 732. [Google Scholar] [CrossRef] [PubMed]
- Mohri, K.; Honkura, Y. Amorphous wire and CMOS IC based magneto-impedance sensors—Origin, topics, and future. Sens. Lett. 2007, 5, 267–270. [Google Scholar] [CrossRef]
- Uchiyama, T.; Hamada, N.; Cai, C. Highly sensitive CMOS magnetoimpedance sensor using miniature multi-core head based on amorphous wire. IEEE Trans. Magn. 2014, 50, 4005404. [Google Scholar] [CrossRef]
- Mohri, K.; Uchiyama, T.; Panina, L.V.; Yamamoto, M.; Bushida, K. Recent advances of amorphous wire CMOS IC magneto-impedance sensors: Innovative high-performance micromagnetic sensor chip. J. Sens. 2015, 2015, 718069. [Google Scholar] [CrossRef]
- He, D.; Mitsuharu, S. A magnetic sensor with amorphous wire. Sensors 2014, 14, 10644–10649. [Google Scholar] [CrossRef]
- He, D. PT-level high-sensitivity magnetic sensor with amorphous wire. Sensors 2020, 20, 161. [Google Scholar] [CrossRef]
- He, D. A feedback method to improve the dynamic range and the linearity of magneto-impedance magnetic sensor. J. Sens. 2019, 19, 2413408. [Google Scholar]
- Robert, B.; Alfredo, J.; Giovanni, C.; Badini, A.; Manuel, V. A low-noise fundamental-mode orthogonal fluxgate magnetometer. IEEE Trans. Magn. 2014, 50, 6500103. [Google Scholar]
- Michal, J.; Mattia, B.; Michal, D.; Elda, S.; David, N.; Coenrad, F. 1-pT noise fluxgate magnetometer for geomagnetic measurements and unshielded magnetocardiography. IEEE Trans. Instrum. Meas. 2020, 69, 2552–2560. [Google Scholar]
- He, D.F.; Tachiki, M.; Itozaki, H. Highly sensitive anisotropic magnetoresistance magnetometer for Eddy current nondestructive evaluation. Rev. Sci. Instrum. 2009, 80, 036102. [Google Scholar] [CrossRef] [PubMed]
- Nathan, S.; Russek, A.; Stephen, E.; Pappas, D.P.; Mark, T. Low-frequency noise measurements on commercial magnetoresistive magnetic field sensors. J. Appl. Phys. 2005, 97, 10Q107. [Google Scholar]
- He, D.; Wang, Z.; Kusano, M.; Kishimoto, S.; Watanabe, M. Evaluation of 3D-Printed titanium alloy using eddy current testing with high-sensitivity magnetic sensor. NDT E Int. 2019, 102, 90–95. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fluxgate | AMR Sensor | NIMS Sensor | |
|---|---|---|---|
| Field resolution at 200 Hz | 0.6 pT/√Hz | 20 pT/√Hz | 6 pT/√Hz |
| Field resolution at 2 Hz | 1 pT/√Hz | 200 pT/√Hz | 20 pT/√Hz |
| Bandwidth | ~1 kHz | 1 MHz | 10 kHz |
| Dimension | ϕ10 × 80 mm | 12 × 10 × 2.5 mm3 | ϕ2 × 5 mm |
| Number of connection wire | 4 wires | 8 wires | 1 coaxial cable |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, D.; Umemori, K.; Ueki, R.; Dohmae, T.; Okada, T.; Tachiki, M.; Ooi, S.; Watanabe, M. Low-Temperature Properties of the Magnetic Sensor with Amorphous Wire. Sensors 2020, 20, 6986. https://doi.org/10.3390/s20236986
He D, Umemori K, Ueki R, Dohmae T, Okada T, Tachiki M, Ooi S, Watanabe M. Low-Temperature Properties of the Magnetic Sensor with Amorphous Wire. Sensors. 2020; 20(23):6986. https://doi.org/10.3390/s20236986
Chicago/Turabian StyleHe, Dongfeng, Kensei Umemori, Ryuichi Ueki, Takeshi Dohmae, Takafumi Okada, Minoru Tachiki, Shuuichi Ooi, and Makoto Watanabe. 2020. "Low-Temperature Properties of the Magnetic Sensor with Amorphous Wire" Sensors 20, no. 23: 6986. https://doi.org/10.3390/s20236986
APA StyleHe, D., Umemori, K., Ueki, R., Dohmae, T., Okada, T., Tachiki, M., Ooi, S., & Watanabe, M. (2020). Low-Temperature Properties of the Magnetic Sensor with Amorphous Wire. Sensors, 20(23), 6986. https://doi.org/10.3390/s20236986