1-Tx/5-Rx Through-Wall UWB Switched-Antenna-Array Radar for Detecting Stationary Humans



Abstract
1. Introduction
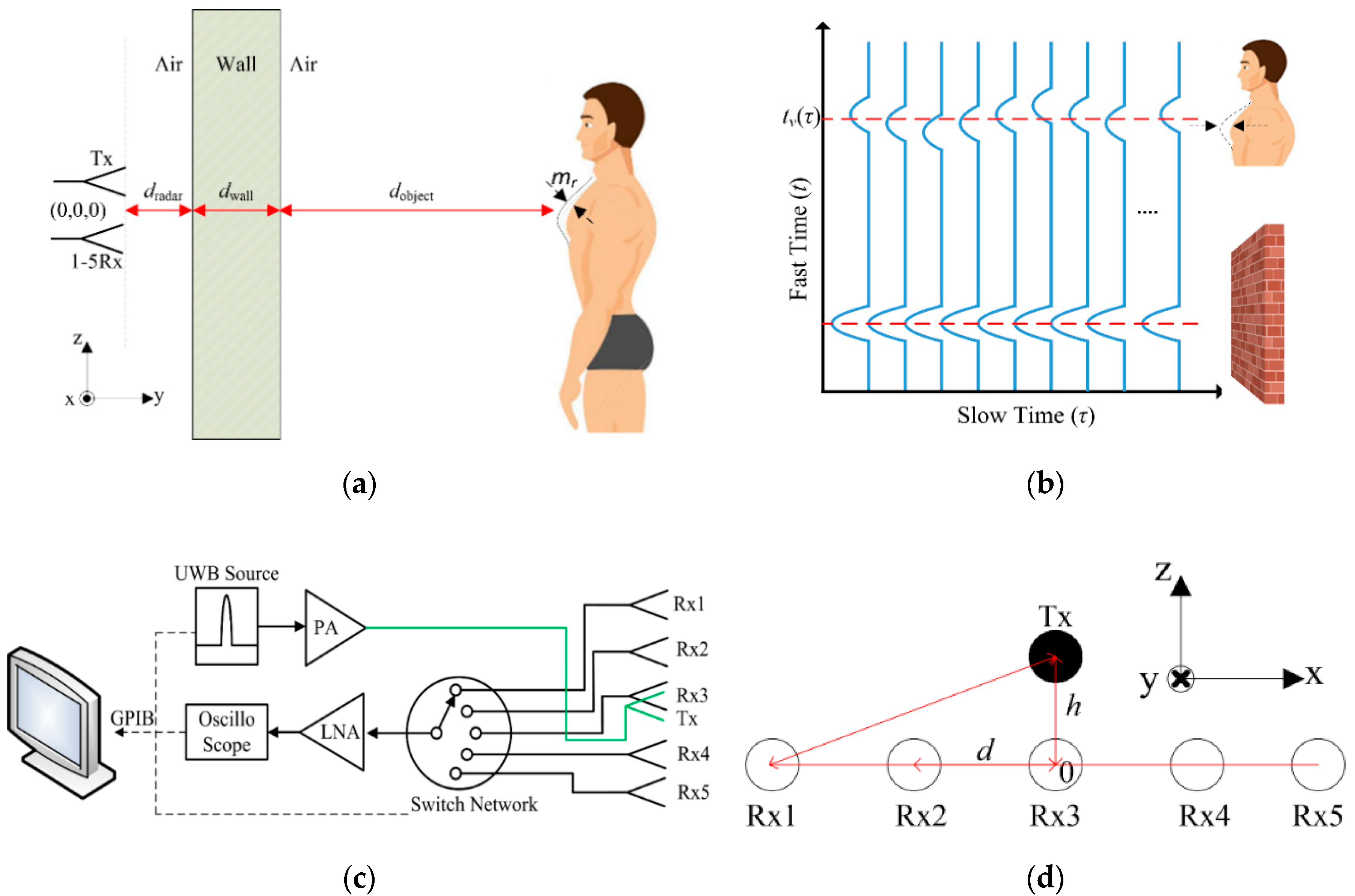
2. Detection Principle
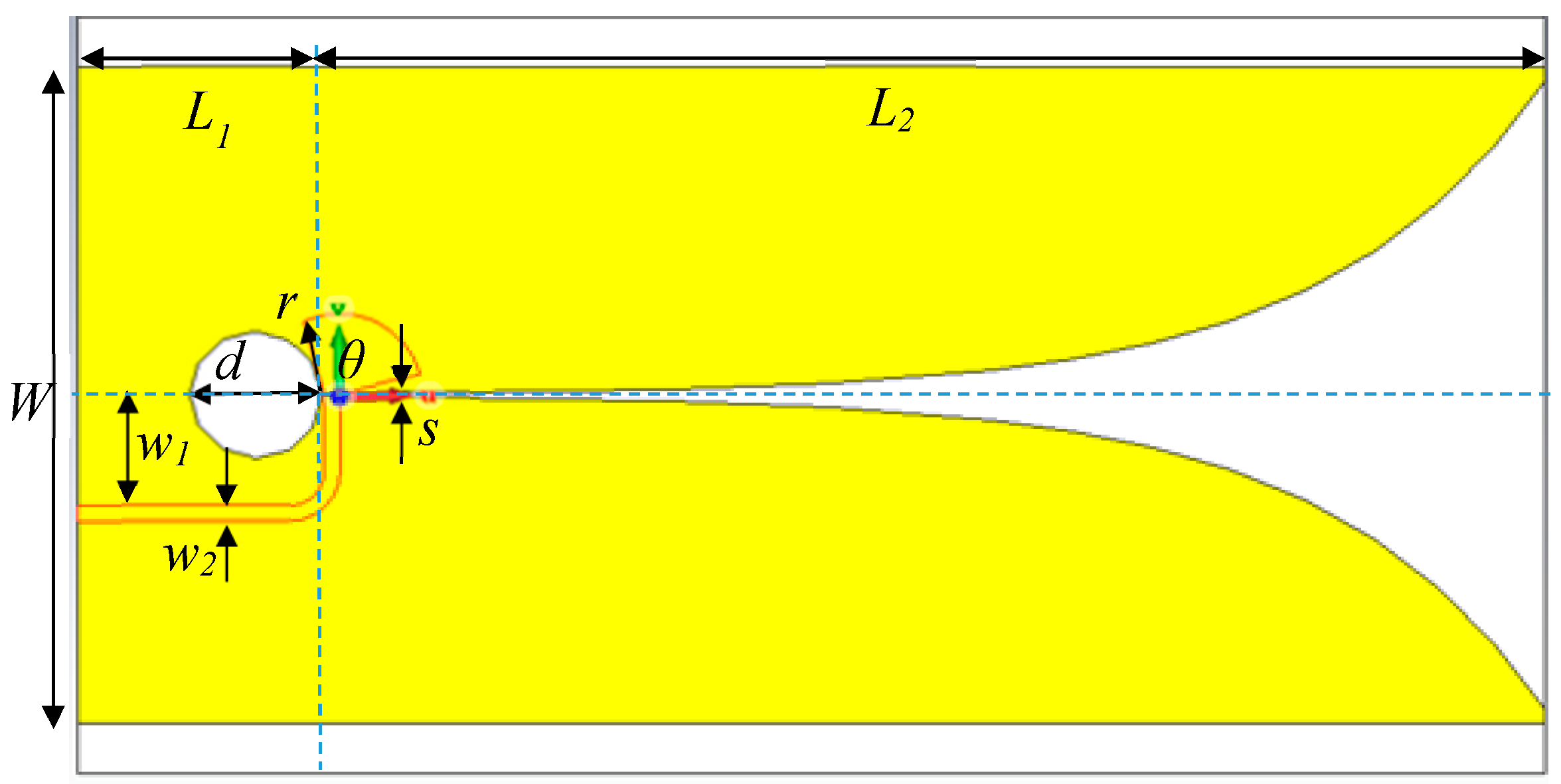
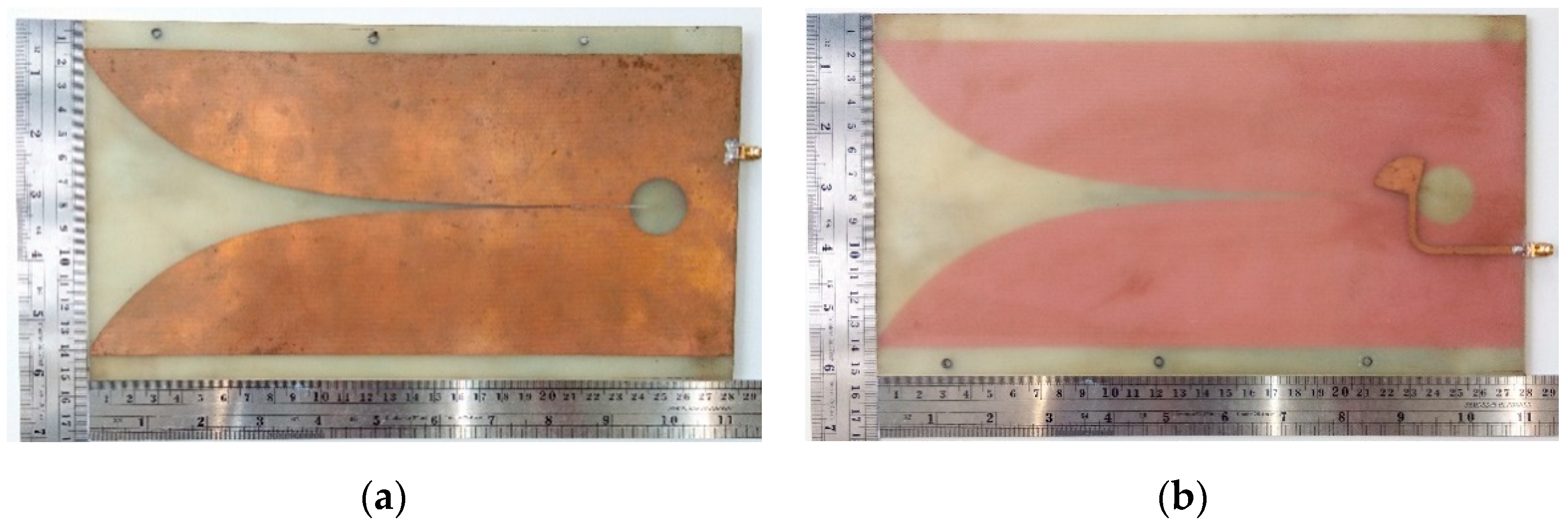
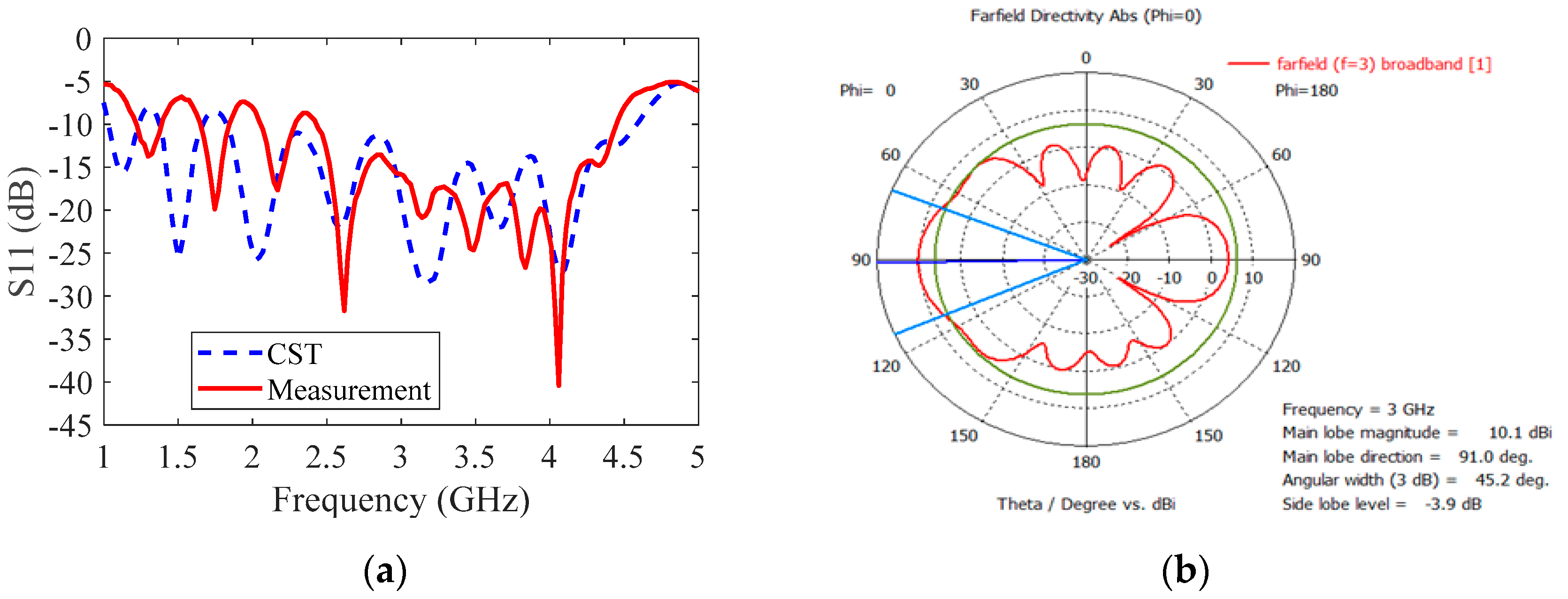
2.1. Vivaldi Antenna Design
2.2. Vital Sign Model Behind the Wall
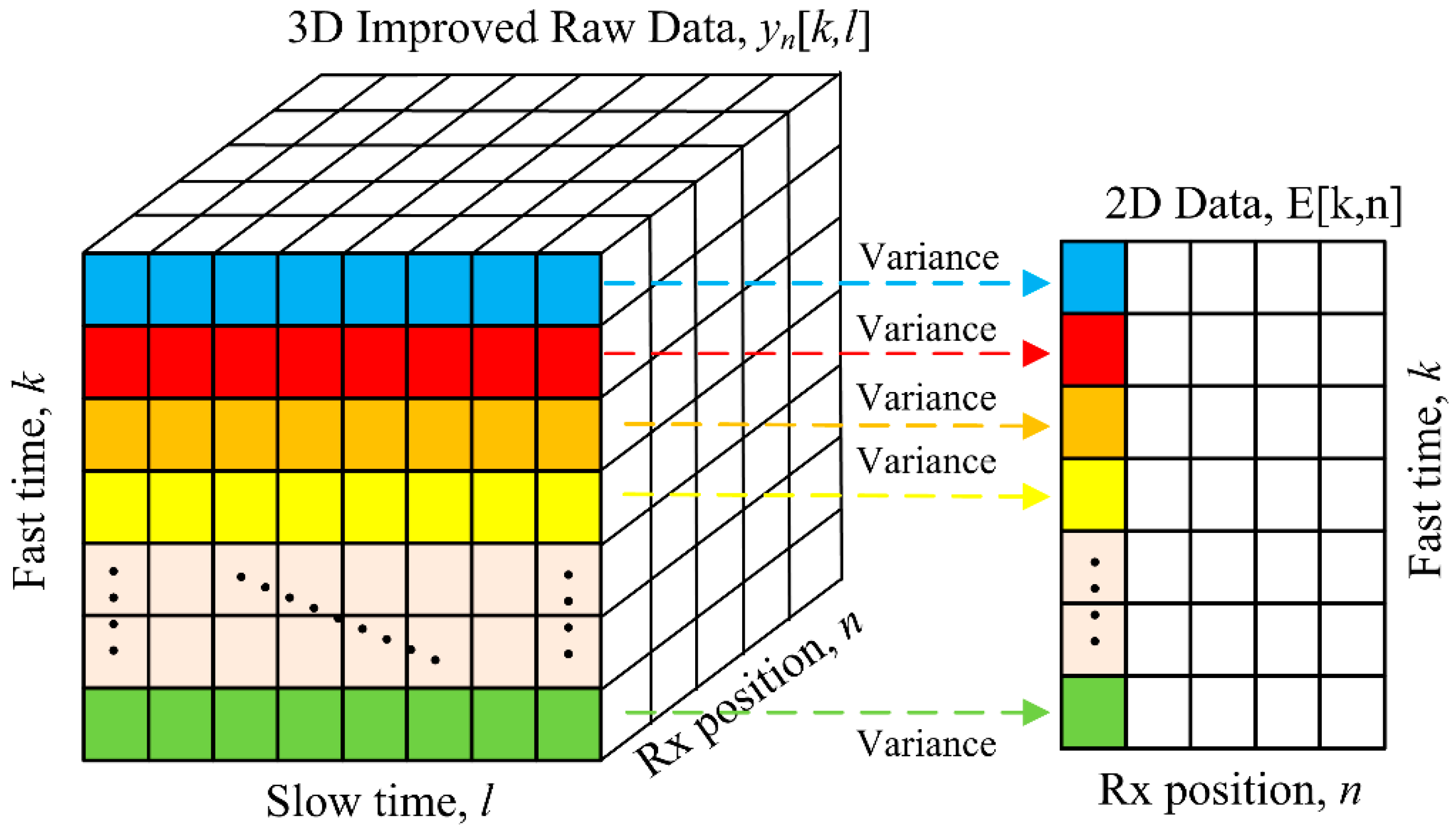
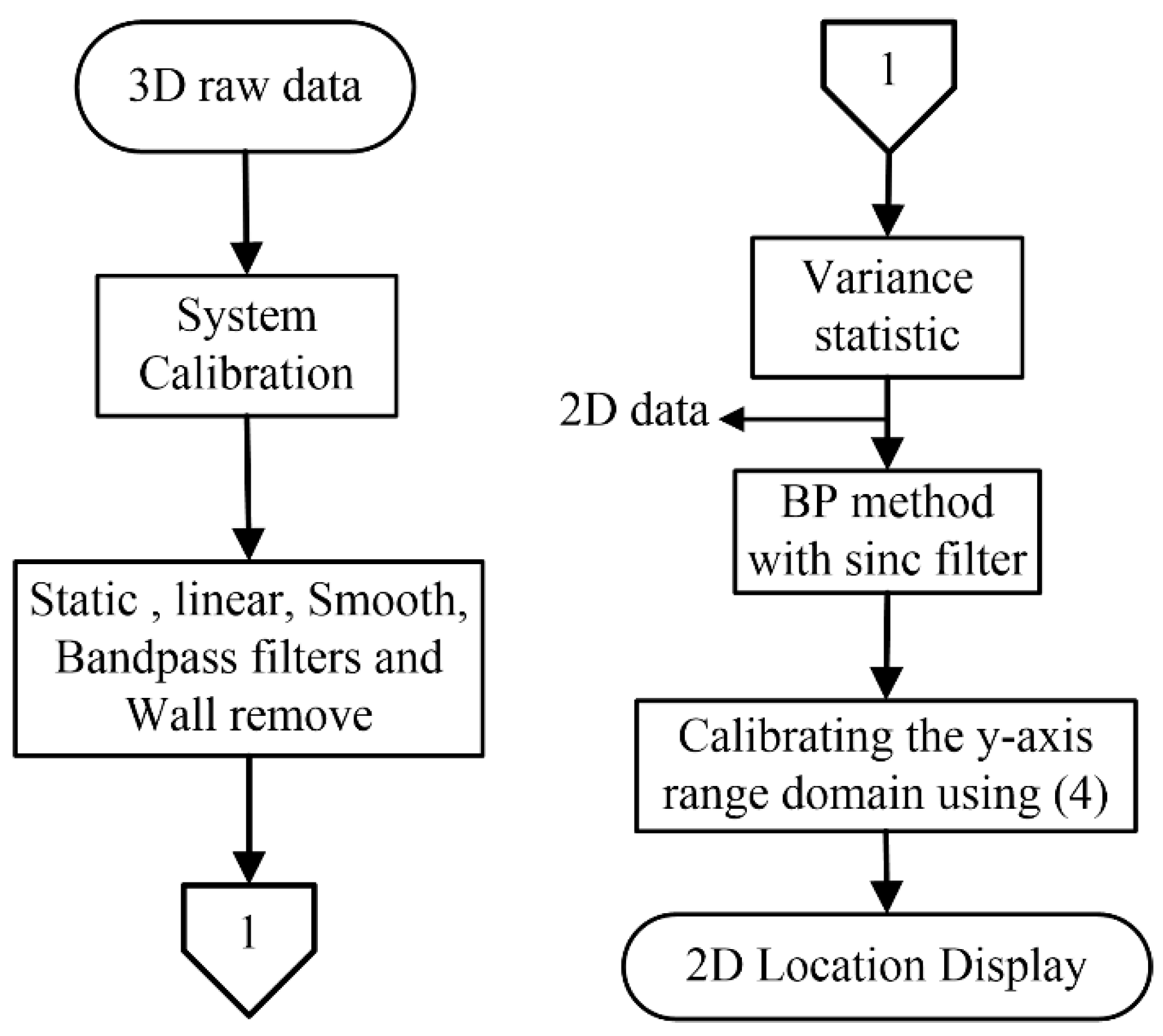
2.3. Preprocessing
2.4. Back Projection Method
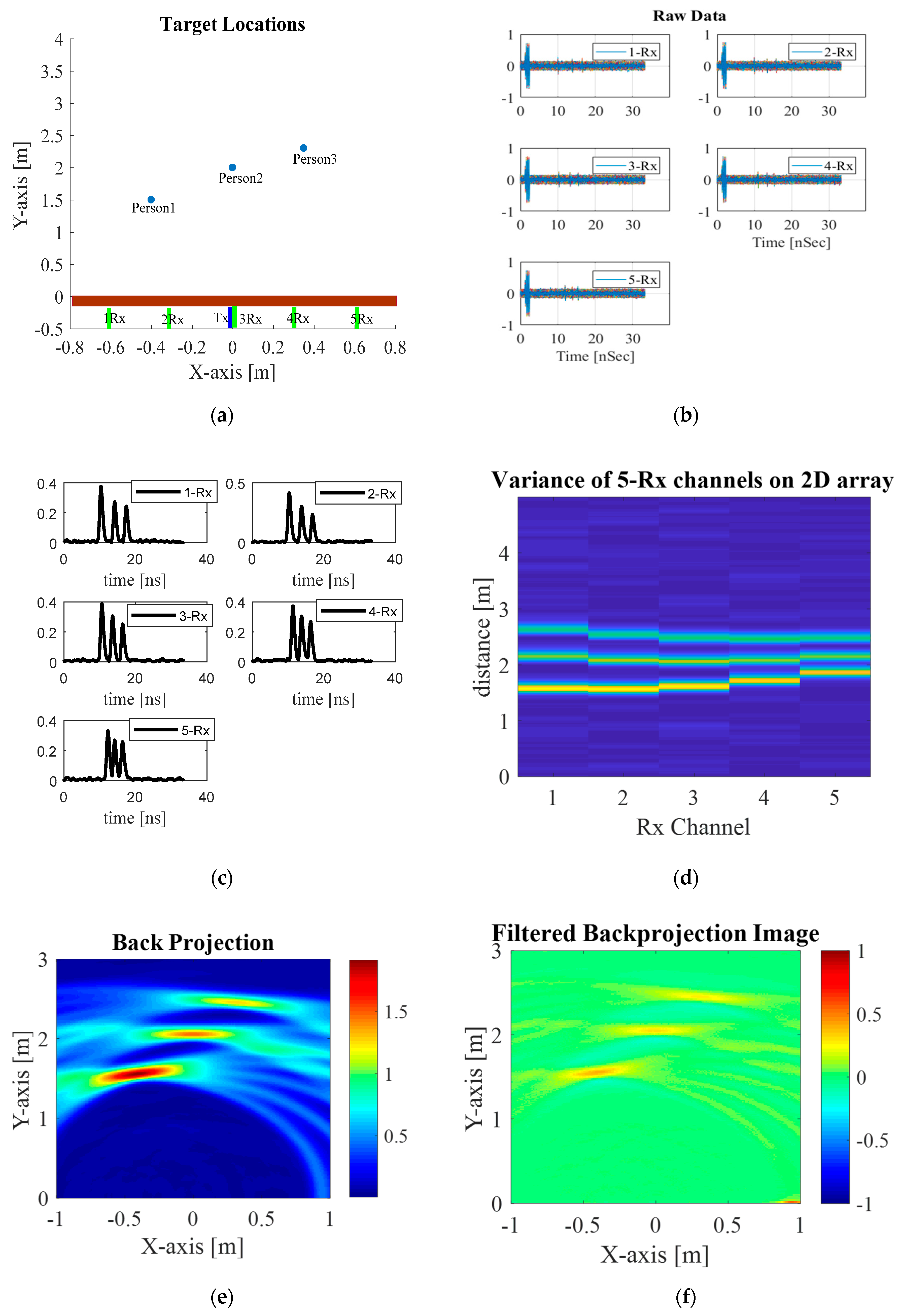
3. Simulation Result
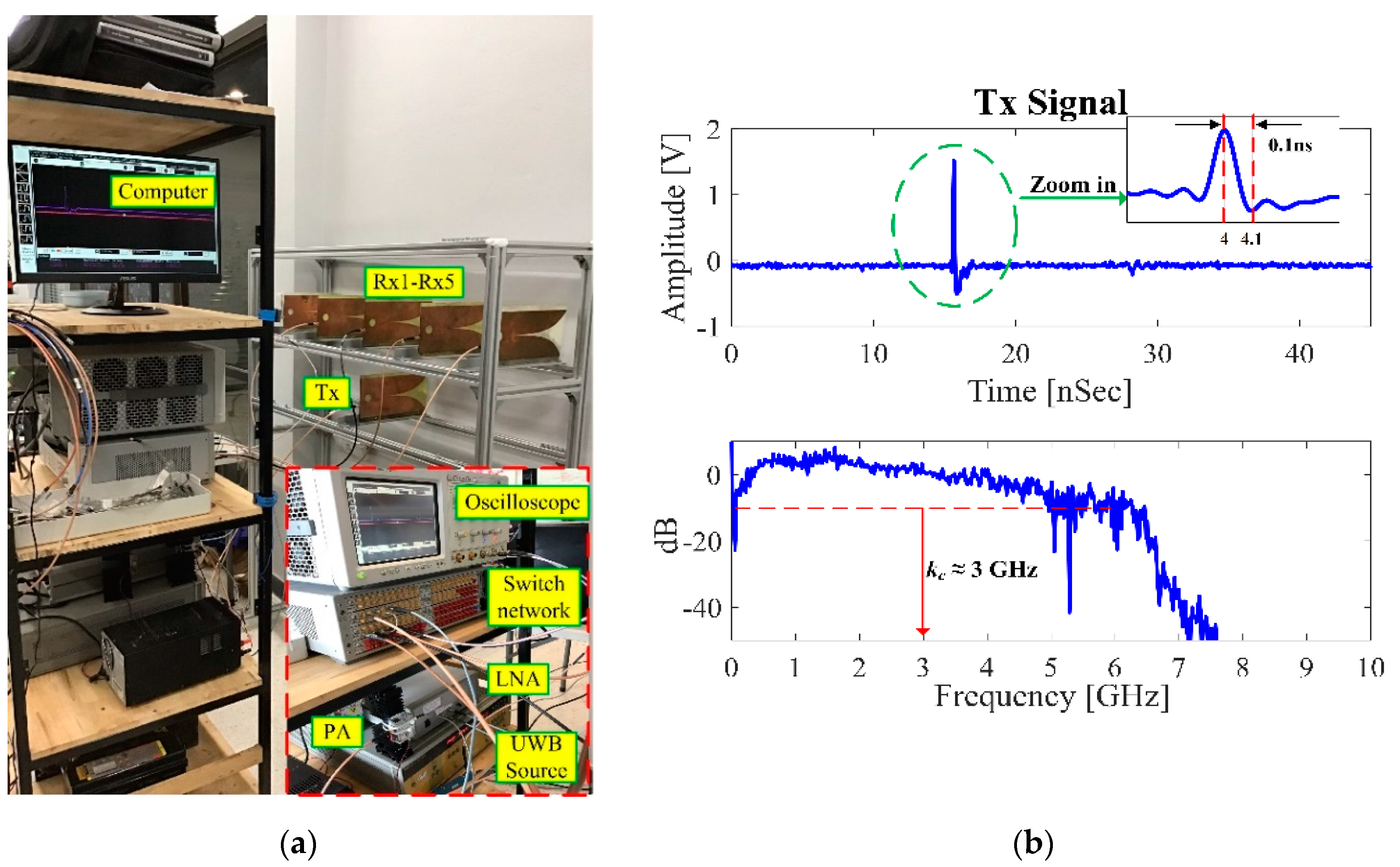
4. Radar System Implementation
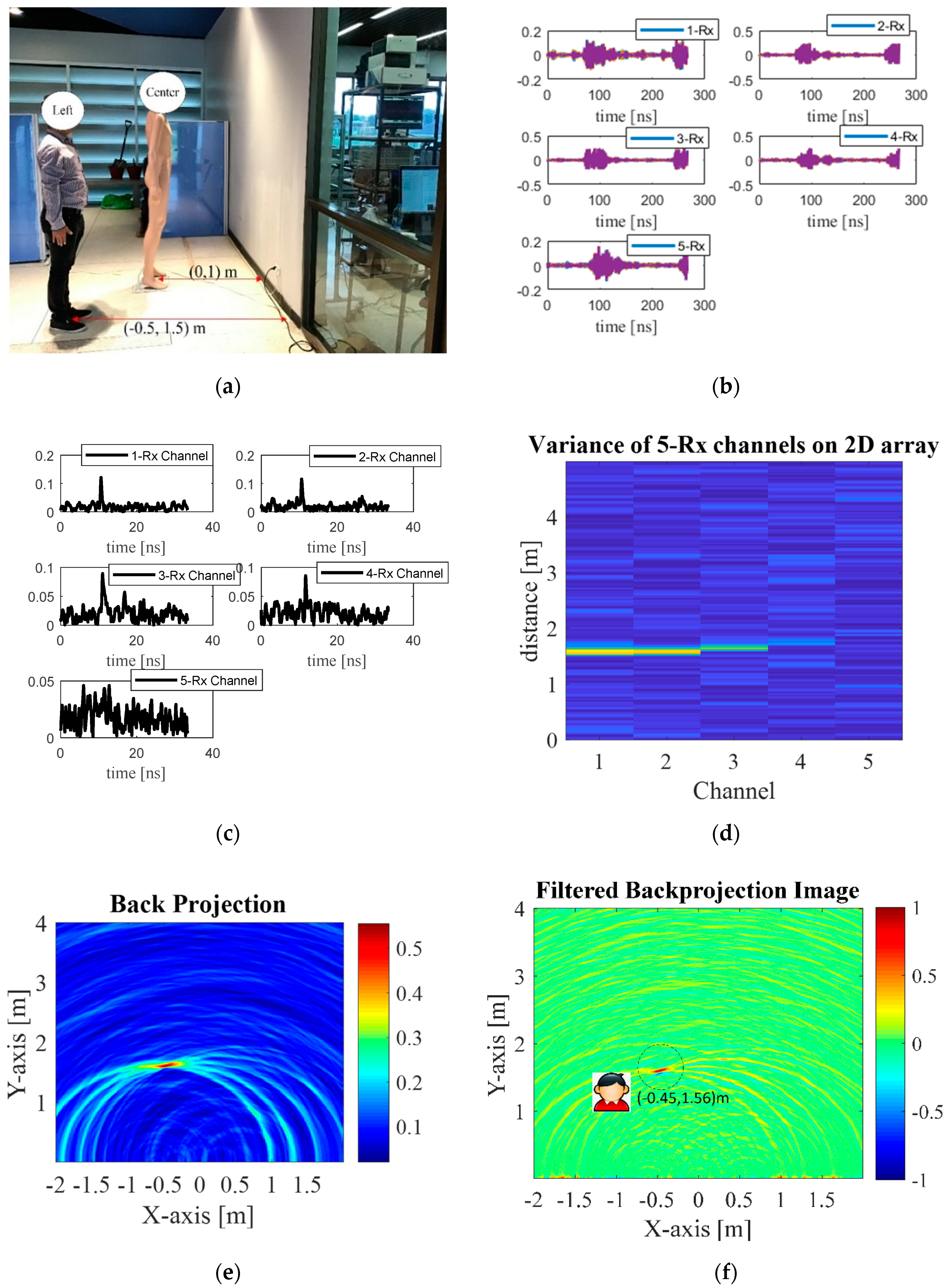
4.1. Through-the-Wall Detection of Single Stationary Human
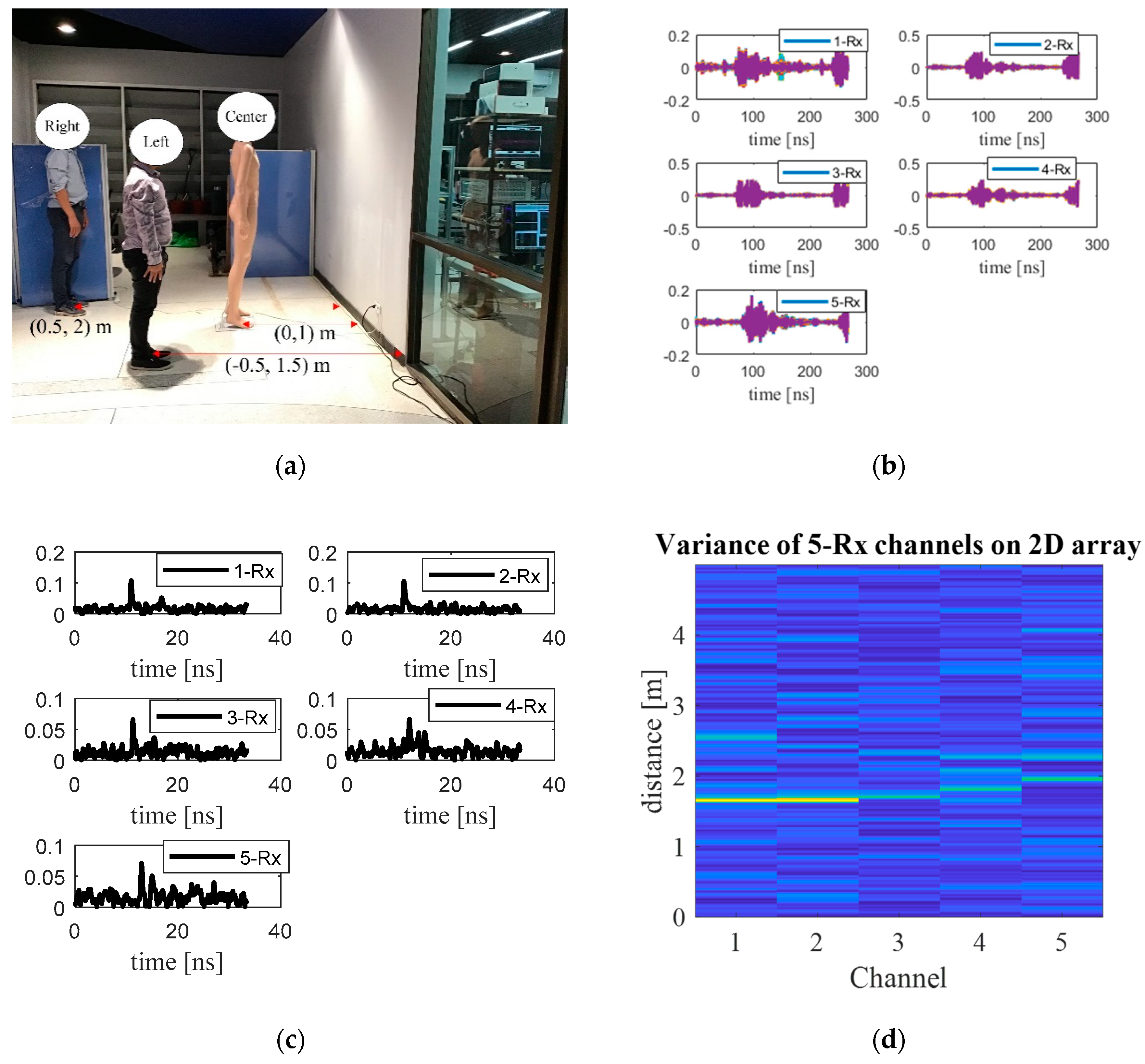
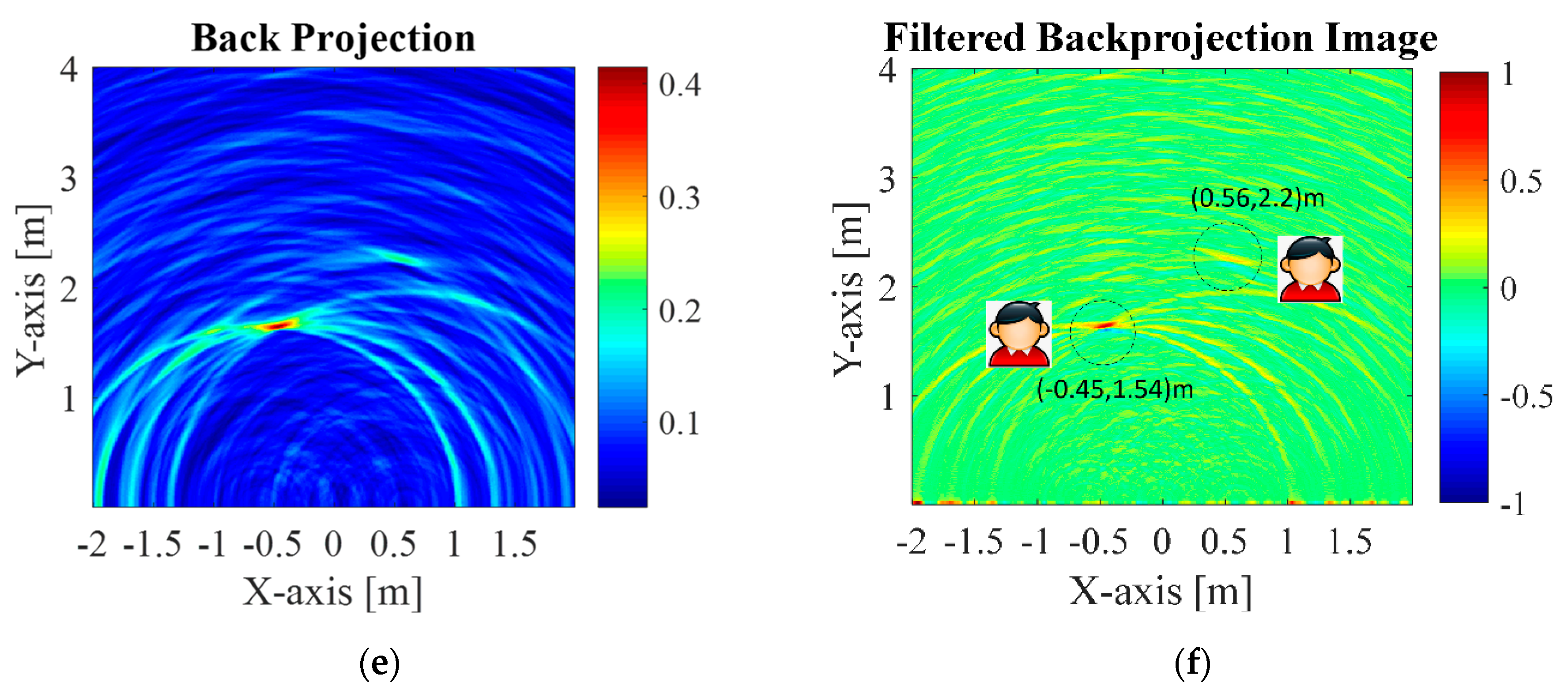
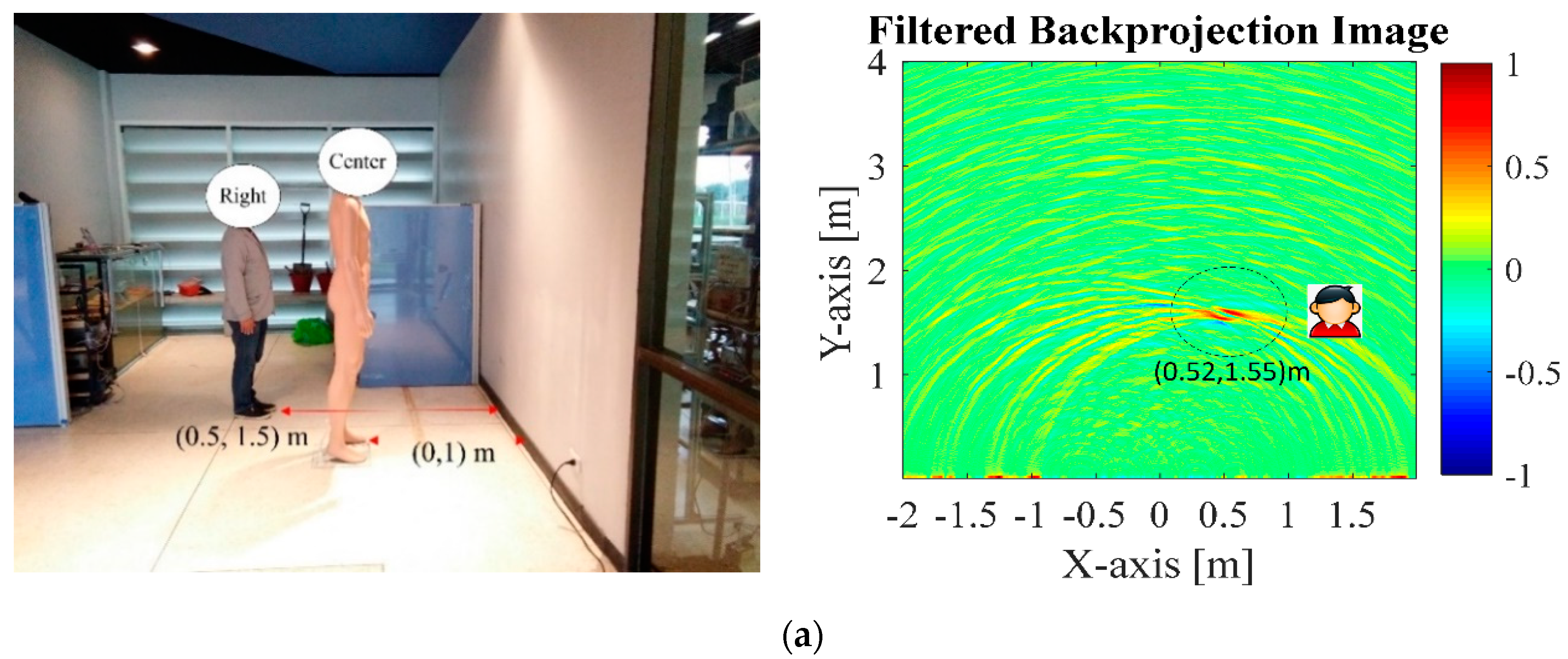
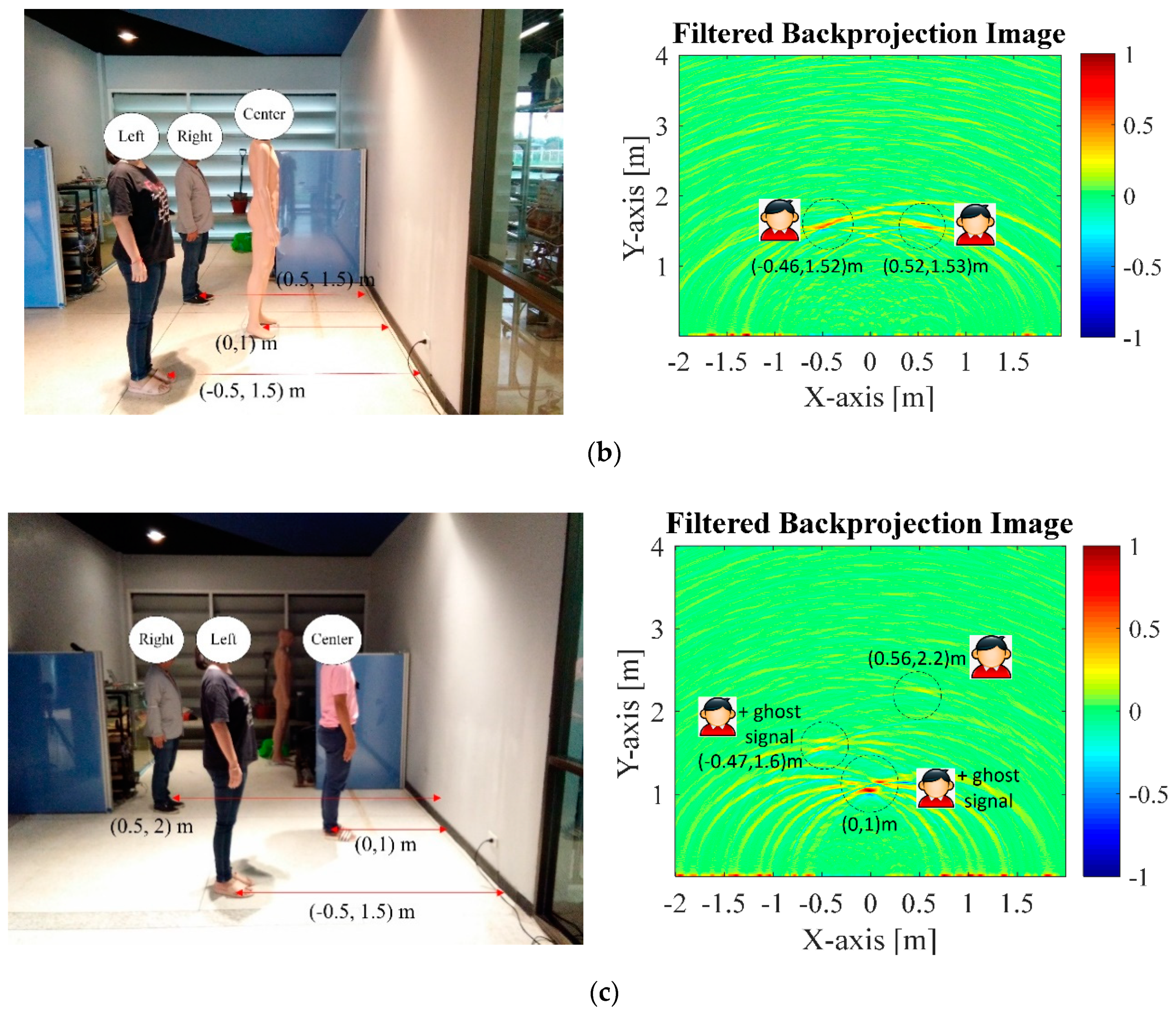
4.2. Through-the-Wall Detection of Multiple Stationary Humans
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jenik, V.; Hudec, P.; Panek, P. Extended Noise Analysis Model of CW-type Radar Sensors with IQ Down-Conversion. Radioengineering 2018, 27, 620–629. [Google Scholar] [CrossRef]
- Tantiparimongkol, L.; Phasukkit, P. Designing of UWB Pulse Generation in FPGA Based on Delay Line Method for Human Range Through the Wall Detecting Application. In Proceedings of the 16th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON) 2019, Pattaya, Chonburi, Thailand, 10–13 July 2019; pp. 13–16. [Google Scholar]
- Rittiplang, A.; Phasukkit, P.; Orankitanun, T. Optimal Central Frequency for Non-Contact Vital Sign Detection Using Monocycle UWB Radar. Sensors 2020, 20, 2916. [Google Scholar] [CrossRef]
- Song, Y.; Hu, J.; Chu, N.; Jin, T.; Zhang, J.; Zhou, Z. Building Layout Reconstruction in Concealed Human Target Sensing via UWB MIMO Through-Wall Imaging Radar. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1199–1203. [Google Scholar] [CrossRef]
- Anwar, N.S.N.; Abdullah, M.Z. Sidelobe Suppression Featuring the Phase Coherence Factor in 3-D Through-the-Wall Radar Imaging. Radioengineering 2016, 25, 730–740. [Google Scholar] [CrossRef]
- Liang, F.; Qi, F.; An, Q.; Lv, H.; Chen, F.; Li, Z.; Wang, J. Detection of Multiple Stationary Humans Using UWB MIMO Radar. Sensors 2016, 16, 1922. [Google Scholar] [CrossRef]
- Wang, W.; Liang, D.; Wang, Z.; Yu, H.; Liu, Q. Design and Implementation of a FPGA and DSP Based MIMO Radar Imaging System. Radioengineering 2015, 24, 518–526. [Google Scholar] [CrossRef]
- Li, J.; Liu, Y.; Xu, H.; Wang, B.; Liu, L.; Chen, X. A High Signal–Noise Ratio UWB Radar for Buried Pipe Location Using Golay Complementary Sequences. Appl. Sci. 2019, 9, 5090. [Google Scholar] [CrossRef]
- Yan, F.; Chang, W.; Li, X.; Zhang, Q. Beam Footprint Detection and Tracking for Non-Cooperative Bistatic SAR. Radioengineering 2016, 25, 592–601. [Google Scholar] [CrossRef]
- Tian, H.; Change, W.; Li, X.; Liu, Z. Strong Spurious Noise Suppression for an FMCW SAR. Radioengineering 2016, 25, 581–591. [Google Scholar] [CrossRef]
- Wang, Y.; Fathy, A.E. Advanced System Level Simulation Platform for Three-Dimensional UWB Through-Wall Imaging SAR Using Time-Domain Approach. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1986–2000. [Google Scholar] [CrossRef]
- Tarchi, D.; Oliveri, F.; Sammartino, P.F. MIMO Radar and Ground-Based SAR Imaging Systems: Equivalent Approaches for Remote Sensing. IEEE Trans. Geosci. Remote Sens. 2013, 51, 425–435. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, X.; Xu, G. MIMO Radar Calibration and Imagery for Near-Field Scattering Diagnosis. IEEE Trans. Aerospace Electr. Syst. 2018, 54, 442–452. [Google Scholar] [CrossRef]
- Ganis, A.; Navarro, E.M.; Schoenlinner, B.; Prechtel, U.; Meusling, A.; Heller, C.; Spreng, T.; Mietzner, J.; Krimmer, C.; Haeberle, B.; et al. A Portable 3-D Imaging FMCW MIMO Radar Demonstrator With a 24×24 Antenna Array for Medium-Range Applications. IEEE Trans. Geosci. Remote Sens. 2018, 56, 298–312. [Google Scholar] [CrossRef]
- Chen, T.; Liu, J.; Chao, P.; Li, P. Ultrawideband Synthetic Aperture Radar for Respiratory Motion Detection. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3749–3763. [Google Scholar] [CrossRef]
- Wang, W.; Hu, Z.; Huang, P. 3-D MIMO Radar Imaging of Ship Target with Rotational Motions. Radioengineering 2019, 28, 776–784. [Google Scholar] [CrossRef]
- Wang, T.; Zhao, Y.; Chen, S.; Zhang, K. A Cascaded Reduced-Dimension STAP Method for Airborne MIMO Radar in the Presence of Jammers. Radioengineering 2017, 26, 337–344. [Google Scholar] [CrossRef]
- Kalkan, Y. A Novel Data Association Method for Frequency Based MIMO Systems. Radioengineering 2016, 25, 194–199. [Google Scholar] [CrossRef]
- Hu, Z.; Zeng, Z.; Wang, K.; Feng, W.; Zhang, J.; Lu, Q.; Kang, X. Design and Analysis of a UWB MIMO Radar System with Miniaturized Vivaldi Antenna for Through-Wall Imaging. Remote Sens. 2019, 11, 1867. [Google Scholar] [CrossRef]
- Liang, F.; Liu, M.; Qi, F.; Lv, H.; Xue, H.; Lu, G.; Wang, J. Through the Wall Imaging of Human Vital Signs Based on UWB MIMO Bioradar. Progress Electromagn. Res. C 2018, 87, 119–133. [Google Scholar] [CrossRef][Green Version]
- Savelyev, T.G.; Zhuge, X.; Yarovoy, A.G.; Ligthart, L.P.; Levitas, B. Comparison of UWB SAR and MIMO-based short-range imaging radars. In Proceedings of the 2009 European Radar Conference (EuRAD), Rome, Italy, 30 September–2 October 2009; pp. 109–112. [Google Scholar]
- Charvat, G.L.; Kempel, L.C.; Rothwell, E.J.; Coleman, C.M.; Mokole, E.L. A Through-Dielectric Radar Imaging System. IEEE Trans. Antennas Propag. 2010, 58, 2594–2603. [Google Scholar] [CrossRef]
- Charvat, G.L.; Kempel, L.C.; Rothwell, E.J.; Coleman, C.M.; Mokole, E.L. A Through-Dielectric Ultrawideband (UWB) Switched-Antenna-Array Radar Imaging System. IEEE Trans. Antennas Propag. 2012, 60, 5495–5500. [Google Scholar] [CrossRef]
- Charvat, G.L.; Kempel, L.C.; Rothwell, E.J.; Coleman, C.M.; Mokole, E.L. An ultrawideband (UWB) switched-antenna-array radar imaging system. In Proceedings of the 2010 IEEE International Symposium on Phased Array Systems and Technology, Waltham, MA, USA, 12–15 October 2010; pp. 543–550. [Google Scholar]
- Ralston, T.S.; Charvat, G.L.; Peabody, J.E. Real-time through-wall imaging using an ultrawideband multiple-input multiple-output (MIMO) phased array radar system. In Proceedings of the 2010 IEEE International Symposium on Phased Array Systems and Technology, Waltham, MA, USA, 12–15 October 2010; pp. 551–558. [Google Scholar]
- Sandora, J.S.; Charvat, G.L. An ultra-wideband Vivaldi and linear hybrid taper antenna for use in a near-field real-time phased array radar system. In Proceedings of the 2013 IEEE International Symposium on Phased Array Systems and Technology, Waltham, MA, USA, 15–18 October 2013; pp. 307–313. [Google Scholar]
- Ebnabbasi, K.; Busuioc, D.; Birken, R.; Wang, M. Taper Design of Vivaldi and Co-Planar Tapered Slot Antenna (TSA) by Chebyshev Transformer. IEEE Trans. Antennas Propag. 2012, 60, 2252–2259. [Google Scholar] [CrossRef]
- Biancheri-Astier, M.; Diet, A.; Le Bihan, Y.; Grzeskowiak, M. UWB Vivaldi Antenna Array Lower Band Improvement for Ground Penetrating Radar Applications. Radioengineering 2019, 28, 92–98. [Google Scholar] [CrossRef]
- Tahar, Z.; Derobert, X.; Benslama, M. An Ultra-Wideband Modified Vivaldi Antenna Applied to Ground and Through the Wall Imaging. Progress Electromagn. Res. C 2018, 86, 111–122. [Google Scholar] [CrossRef]
- Eko Setijadi, N.; Hendrantoro, G. Comparison study of S-Band Vivaldi-based antennas. In Proceedings of the 2016 IEEE Region 10 Symposium (TENSYMP), Bali, Indonesia, 9–11 May 2016; pp. 188–193. [Google Scholar] [CrossRef]
- Natarajan, R.; Kanagasabai, M.; George, J.V. Design of an X-band Vivaldi antenna with low radar cross section. IET Microw. Antennas Propag. 2016, 10, 651–655. [Google Scholar] [CrossRef]
- Pandey, G.K.; Singh, H.S.; Bharti, P.K.; Pandey, A.; Meshram, M.K. High Gain Vivaldi Antenna for Radar and Microwave Imaging Applications. Int. J. Signal Process. Syst. 2015, 3, 35–39. [Google Scholar] [CrossRef]
- Kaemarungsi, K.; Athikulwongse, K.; Rungprateepthaworn, K.; Duangtanoo, T.; Dangsakul, P. On study of an impulse RADAR sensor for subsurface object detection. In Proceedings of the 12th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, ECTI-CON 2015, Hua Hin, Thailand, 24–27 June 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Liang, X.; Wang, Y.; Wu, S.; Gulliver, T.A. Experimental Study of Wireless Monitoring of Human Respiratory Movements Using UWB Impulse Radar Systems. Sensors 2018, 18, 3065. [Google Scholar] [CrossRef]
- Rittiplang, A.; Phasukkit, P. Human Movement Detection behind the Wall based on Doppler Frequency and Standard Deviation. In Proceedings of the 2018 International Symposium on Multimedia and Communication Technology (ISMAC), Tottori, Japan, 29–31 August 2018. [Google Scholar]
- Rittiplang, A.; Phasukkit, P. UWB Radar for Multiple Human Detection Through the Wall Based on Doppler Frequency and Variance Statistic. In Proceedings of the 2019 12th Biomedical Engineering International Conference (BMEiCON), Ubon Ratchathani, Thailand, 19–22 November 2019. [Google Scholar]
- Tantiparimongkol, L.; Phasukkit, P. IR-UWB Pulse Generation Using FPGA Scheme for through Obstacle Human Detection. Sensors 2020, 20, 3750. [Google Scholar] [CrossRef]
- Liang, X.; Zhang, H.; Fang, G.; Ye, S.; Gulliver, T.A. An Improved Algorithm for Through-Wall Target Detection Using Ultra-Wideband Impulse Radar. IEEE Access 2017, 5, 22101–22118. [Google Scholar] [CrossRef]
- Yang, S.; Qin, H.; Liang, X.; Gulliver, T.A. Clutter Elimination and Harmonic Suppression of Non-Stationary Life Signs for Long-Range and Through-Wall Human Subject Detection Using Spectral Kurtosis Analysis (SKA)-Based Windowed Fourier Transform (WFT) Method. Appl. Sci. 2019, 9, 355. [Google Scholar] [CrossRef]
- Barrie, G. Ultra-Wideband Synthetic Aperture Imaging, Data and Image Processing, (DRDC Ottawa TM 2003-015); Defence R&D Canada: Ottawa, ON, Canada, 2003. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| W | 130 mm | εr (FR4) | 4.3 |
| L1 | 50 mm | s | 0.5 mm |
| L2 | 230 mm | d | 25 mm |
| w1 | 15 mm | r | 16 mm |
| w2 | 3 mm | θ | 90° |
| PCB thickness | 1.6 mm | copper thickness | 0.035 mm |
| Parameter | Description | Value |
|---|---|---|
| A0 | Tx voltage | 1 V |
| kc | Central frequency | 3 GHz |
| fs_fast | Sampling frequency in fast time | 20 GHz |
| PRI | Pulse repetition interval | 35 ns |
| τmax | Maximum slow time | 60 s |
| fs_slow | Sampling frequency in slow time | 50 Hz |
| Hardware | Brand/Model/Type | Specification |
|---|---|---|
| UWB source | HP-8133A pulse generator | 1.0 V Peak voltage, Central frequency 3 GHz, BW = 0.2‒5.9 GHz |
| Tx and Rx antennas | Vivaldi type | S-Band at 9–10 dBi, angular ≈ 45° |
| Power amplifier (PA) | ZVE-8G+ Mini-Circuits | 2–8 GHz, 30 dBm |
| Low noise amplifier (LNA) | R and K-AA260-OS | 2–5 GHz, 26 dBm |
| Analog-to-digital (ADC) | Oscilloscope, Agilent Infinium DSO80604B | Maximum frequency of 6 GHz, Sampling rate 40 GSa/s |
| RF-Switch | Agilent 34980A | Multifunction switch network |
| GPIB USB port | Agilent GPIB, 82357B | Transfer rate of 850 KB/sec |
| Wall | Concrete | 4-inch thickness, Permittivity (εr) of 4.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rittiplang, A.; Phasukkit, P. 1-Tx/5-Rx Through-Wall UWB Switched-Antenna-Array Radar for Detecting Stationary Humans. Sensors 2020, 20, 6828. https://doi.org/10.3390/s20236828
Rittiplang A, Phasukkit P. 1-Tx/5-Rx Through-Wall UWB Switched-Antenna-Array Radar for Detecting Stationary Humans. Sensors. 2020; 20(23):6828. https://doi.org/10.3390/s20236828
Chicago/Turabian StyleRittiplang, Artit, and Pattarapong Phasukkit. 2020. "1-Tx/5-Rx Through-Wall UWB Switched-Antenna-Array Radar for Detecting Stationary Humans" Sensors 20, no. 23: 6828. https://doi.org/10.3390/s20236828
APA StyleRittiplang, A., & Phasukkit, P. (2020). 1-Tx/5-Rx Through-Wall UWB Switched-Antenna-Array Radar for Detecting Stationary Humans. Sensors, 20(23), 6828. https://doi.org/10.3390/s20236828