Empirical Model of Radio Wave Propagation in the Presence of Vegetation inside Greenhouses Using Regularized Regressions

 ,
,  ,
,  , ,
, ,
Abstract
1. Introduction
- A new empirical model of radio wave attenuation for vegetation is developed for the 2.4 GHz band which includes the vegetation height as a parameter to be taken into account in addition to the distance between the transmitter and receiver node.
- This attenuation model has been obtained from attenuation measurements made with our own RSSI measurement system from four tomato greenhouses. The proposed model has then been validated with experimental data from other plantations.
- A method is presented to determine the signal attenuation in an empirical way that can be applied to other greenhouse plantations.
- The research contributes to more accurate measurements of attenuation due to vegetation that allows a better planning of the deployment of WSN nodes within a tomato greenhouse for, e.g., humidity control.
2. State of the Art and Related Works
3. Experimental Determination of Attenuation in Vegetation
3.1. RSSI Measurement System
- (1)
- The deployment nodes, both on the transmitting (TX) and receiving side (RX), are the Re-Mote with the technical characteristics described in [43]. They work with the Contiki Operating System and their applications are written in C language. The nodes communicate in the 2.4 GHz industrial scientific medical (ISM) band (λ = 12.24 cm), with the IEEE802.15.4 standard that defines the media access control (MAC) and physics (PHY) layer, designed for low energy consumption, low speed and short-range technologies [44,45]. It has a 3-dBi gain dipole antenna, the receiver sensitivity is −100 dBm with omnidirectional radiation pattern, i.e., the radiated signal has the same intensity in all directions [13]. Figure 2 describes the TX node powered by a 3.7 V Li-ion battery with capacity of 6600 mAh, which gave it autonomy of operation because only it moved away from the RX node. These elements are enclosed in a PVC box with an IP65 protection rating, prepared to prevent dust and water jets from entering. In Figure 2 we can see that the electrical energy with which the RX node operated was obtained from its connection to the Raspberry Pi USB port. In addition, in Figure 2, we see that this embedded computer was powered through a 220 V electrical outlet in the greenhouse. There are other studies on this subject, which also use wireless sensor networks (WSN), and use modular devices based on Arduino boards and Xbee radio modules [10]. However, the authors prefer to use the Re-Mote nodes due to it being a small device (7.3 × 4 cm), with integrated radio modules in the 2.4 GHz, 868/915 MHz frequency bands, in addition to having previous knowledge of their configuration.
- (2)
- The RSSI information collected in the sink node is forwarded to the Raspberry-Pi 3 embedded computer and stored in its microSD memory in CSV format to facilitate its processing. The Raspberry Pi performs its functions through the Raspbian operating system. It physically communicates with the Re-Mote sink node through the USB port and receives the RSSI values by executing the script written with the Python programming language.
3.2. Deployment and Field Testing
- (a)
- The nodes are placed at the same height. The sink node receives the value of the attenuated signal. The sink node receives the value of the attenuated signal sent by the remote node every 5 min, repeating this measurement 10 times. It is located at the end of the greenhouse and another node behind the first wall of tomato plants, which transmits the signal (TX node) as shown in Figure 3a. In other words, a wall of tomato plants between the nodes blocks the signal.
- (b)
- The sink node remains in its same position RX1, while the other node, the transmitter (TX), moves away in a straight line to two tomato plant walls in the TX2 position described in Figure 3b, thus successively increasing the number of “tomato plant walls” and reach the final position: TXN, increasing the distance between both nodes (TX and RX), as well as the attenuation of the signal detailed in Figure 3c.
- (c)
- When it reaches the limit of coverage between the two nodes, the process is restarted, but moving the nodes 2 m along the “tomato wall”, with the receiver node now in position RX2 as shown in Figure 3d, and then repeat the two previous steps. Thus, in Figure 3e, the sink node called “RX1” moves like this to “RX4” passing previously through the positions “RX2” and “RX3”, each one receiving the attenuated signal sent by the transmitter nodes from TX1 to TXN. 160 RSSI values are recorded for each specific distance between the TX and RX nodes, 10 values in each position of the sink node RX1, RX2, RX3, RX4 and this process is carried out in 4 different greenhouses. The collected values are averaged.
- (d)
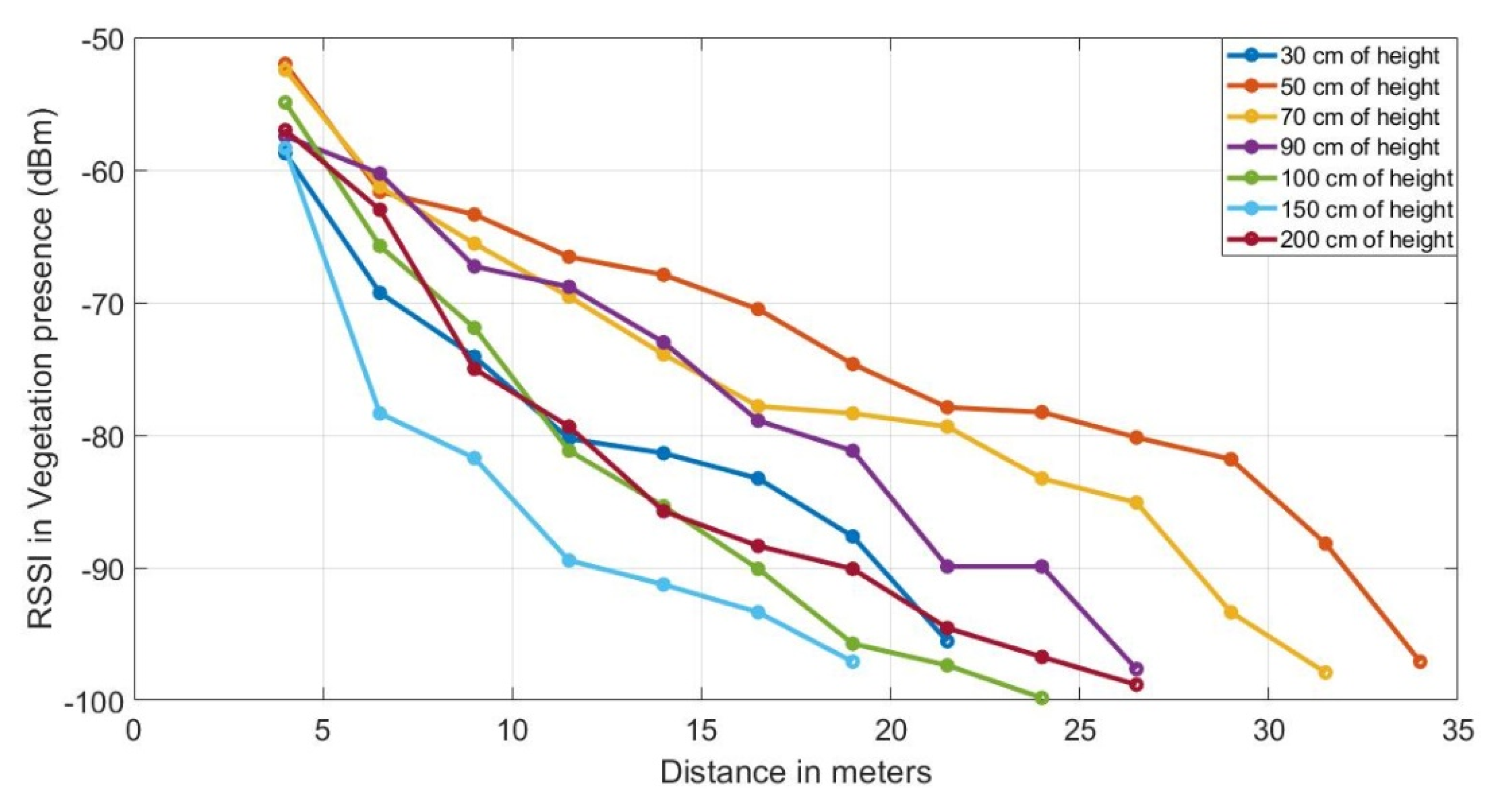
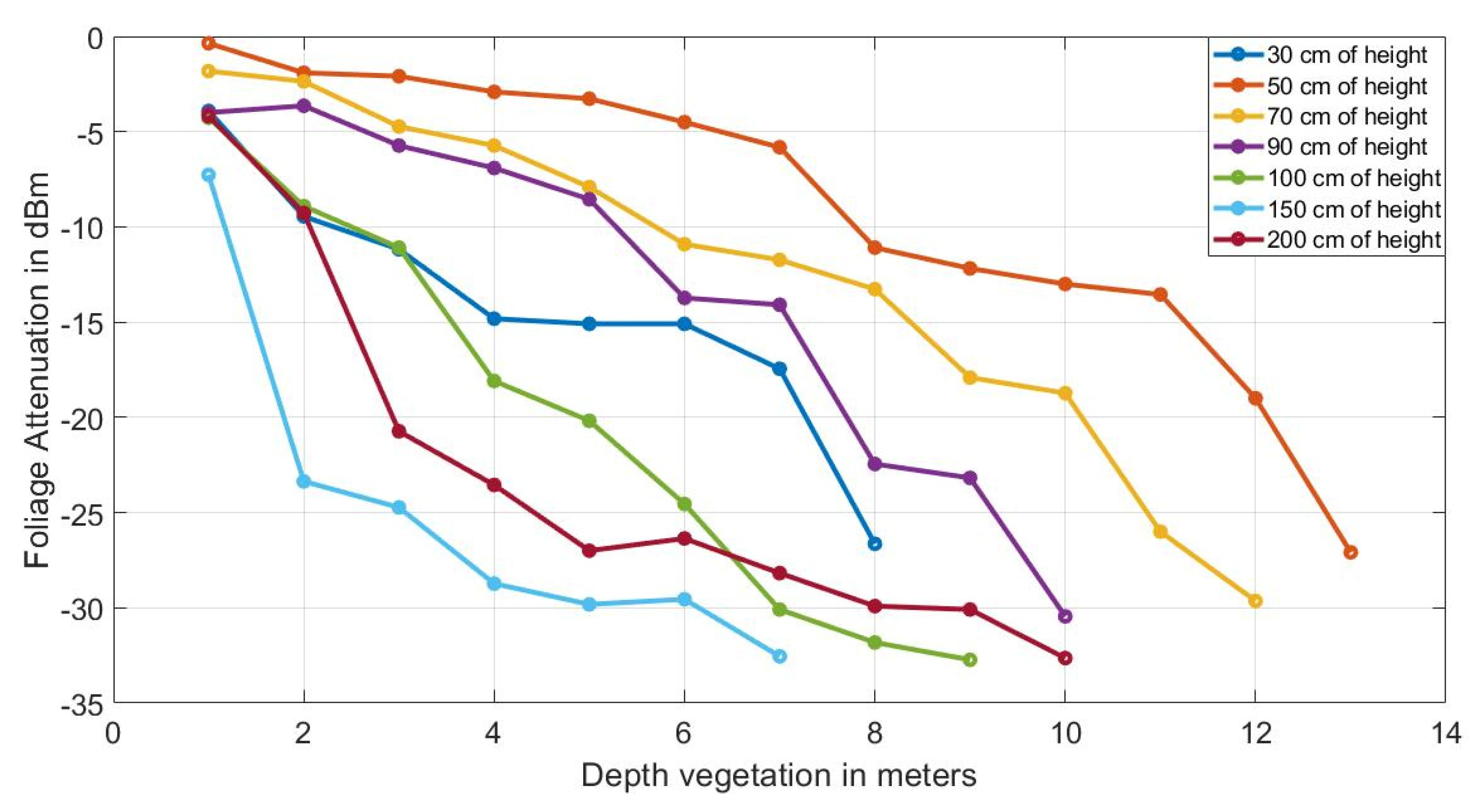
- The steps shown above are repeated for new heights. The communication between the nodes was evaluated when the height of their antennas was 30 cm, 50 cm, 70 cm, 90 cm, 100 cm, 150 cm, and 200 cm.
3.3. Attenuation of Radio Waves in Free Space
3.4. Received Signal Strength in the Presence of Vegetation
3.5. Calculation of Attenuation by the Presence of Vegetation
4. Proposed Method for Determining the Attenuation by the Presence of Vegetation
4.1. Parametric Optimization of the Attenuation
4.2. Reduced Parametric Optimization of the Attenuation
5. Results and Analysis
6. Discussion
7. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Suman, S.; Kumar, S.; De, S. Path Loss Model for UAV-Assisted RFET. IEEE Commun. Lett. 2018, 22, 2048–2051. [Google Scholar] [CrossRef]
- Caicedo-Ortiz, J.G.; De-la-Hoz-Franco, E.; Morales Ortega, R.; Piñeres-Espitia, G.; Combita-Niño, H.; Estévez, F.; Cama-Pinto, A. Monitoring system for agronomic variables based in WSN technology on cassava crops. Comput. Electron. Agric. 2018, 145, 275–281. [Google Scholar] [CrossRef]
- Zapata-Sierra, A.J.; Cama-Pinto, A.; Montoya, F.G.; Alcayde, A.; Manzano-Agugliaro, F. Wind missing data arrangement using wavelet based techniques for getting maximum likelihood. Energy Convers. Manag. 2019, 185, 552–561. [Google Scholar] [CrossRef]
- Cama-Pinto, D.; Chávez-Muñoz, P.D.; Solano-Escorcia, A.F.; Cama-Pinto, A. Data supporting the reconstruction study of missing wind speed logs using wavelet techniques for getting maximum likelihood. Data Brief 2020, 31, 105835. [Google Scholar] [CrossRef] [PubMed]
- Hamasaki, T. Propagation Characteristics of A 2.4 GHz Wireless Sensor Module with A Pattern Antenna in Forestry and Agriculture Field. In Proceedings of the 2019 IEEE International Symposium on Radio-Frequency Integration Technology (RFIT), Nanjing, China, 28–30 August 2019; p. 8929207. [Google Scholar] [CrossRef]
- Montoya, F.G.; Gomez, J.; Manzano-Agugliaro, F.; Cama, A.; García-Cruz, A.; De La Cruz, J.L. 6LoWSoft: A software suite for the design of outdoor environmental measurements. J. Food Agric. Environ. 2013, 11, 2584–2586. [Google Scholar]
- Picallo, I.; Klaina, H.; Lopez-Iturri, P.; Aguirre, E.; Celaya-Echarri, M.; Azpilicueta, L.; Eguizábal, A.; Falcone, F.; Alejos, A. A radio channel model for D2D communications blocked by single trees in forest environments. Sensors 2019, 19, 4606. [Google Scholar] [CrossRef]
- Foerster, A.; Udugama, A.; Görg, C.; Kuladinithi, K.; Timm-Giel, A.; Cama-Pinto, A. A novel data dissemination model for organic data flows. In Lecture Notes of the Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering; Springer International Publishing: Cham, Switzerland, 2015; Volume 158, pp. 239–252. [Google Scholar] [CrossRef]
- Cama-Pinto, A.; Piñeres-Espitia, G.; Comas-González, Z.; Vélez-Zapata, J.; Gómez-Mula, F. Design of a monitoring network of meteorological variables related to tornadoes in Barranquilla-Colombia and its metropolitan area. Ingeniare 2017, 25, 585–598. [Google Scholar] [CrossRef][Green Version]
- Cama-Pinto, A.; Piñeres-Espitia, G.; Caicedo-Ortiz, J.; Ramírez-Cerpa, E.; Betancur-Agudelo, L.; Gómez-Mula, F. Received strength signal intensity performance analysis in wireless sensor network using Arduino platform and XBee wireless modules. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef]
- Brinkhoff, J.; Hornbuckle, J. Characterization of WiFi signal range for agricultural WSNs. In Proceedings of the 2017 23rd Asia-Pacific Conference on Communications: Bridging the Metropolitan and the Remote, (APCC), Perth, Australia, 11–13 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Montoya, F.G.; Gómez, J.; Cama, A.; Zapata-Sierra, A.; Martínez, F.; De La Cruz, J.L.; Manzano-Agugliaro, F. A monitoring system for intensive agriculture based on mesh networks and the android system. Comput. Electron. Agric. 2013, 99, 14–20. [Google Scholar] [CrossRef]
- Khairunnniza-Bejo, S.; Ramli, N.; Muharam, F.M. Wireless sensor network (WSN) applications in plantation canopy areas: A review. Asian J. Sci. Res. 2018, 11, 151–161. [Google Scholar] [CrossRef]
- Saeed, N.; Alouini, M.-S.; Al-Naffouri, T.Y. Toward the Internet of Underground Things: A Systematic Survey. IEEE Commun. Surv. Tutor. 2019, 21, 3443–3466. [Google Scholar] [CrossRef]
- Razafimandimby, C.; Loscrí, V.; Vegni, A.M.; Neri, A. Efficient Bayesian communication approach for smart agriculture applications. In Proceedings of the IEEE Vehicular Technology Conference, Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Srisooksai, T.; Kaemarungsi, K.; Takada, J.; Saito, K. Radio propagation measurement and characterization in outdoor tall food grass agriculture field for wireless sensor network at 2.4 GHz band. Prog. Electromagn. Res. C 2018, 88, 43–58. [Google Scholar] [CrossRef]
- Cama-Pinto, A.; Gil-Montoya, F.; Gómez-López, J.; García-Cruz, A.; Manzano-Agugliaro, F. Wireless surveillance sytem for greenhouse crops. DYNA 2014, 81, 164–170. [Google Scholar] [CrossRef]
- Peng, Y.; Xiao, Y.; Fu, Z.; Dong, Y.; Zheng, Y.; Yan, H.; Li, X. Precision irrigation perspectives on the sustainable water-saving of field crop production in China: Water demand prediction and irrigation scheme optimization. J. Clean. Prod. 2019, 230, 365–377. [Google Scholar] [CrossRef]
- Peng, X.; Ye, T.; Wang, Y. Research and design of precision irrigation system based on artificial neural network. In Proceedings of the 30th Chinese Control and Decision Conference, CCDC 2018, Shenyang, China, 9–11 June 2018; pp. 3865–3870. [Google Scholar] [CrossRef]
- Li, Z.; Sun, Z.; Singh, T.; Oware, E. Large range soil moisture sensing for inhomogeneous environments using magnetic induction networks. In Proceedings of the 2019 IEEE Global Communications Conference, (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019. [Google Scholar] [CrossRef]
- Caparrós-Martínez, J.L.; Rueda-Lópe, N.; Milán-García, J.; de Pablo Valenciano, J. Public policies for sustainability and water security: The case of Almeria (Spain). Glob. Ecol. Conserv. 2020, 23, e01037. [Google Scholar] [CrossRef]
- Parlato, M.C.M.; Valenti, F.; Porto, S.M.C. Covering plastic films in greenhouses system: A GIS-based model to improve post use suistainable management. J. Environ. Manag. 2020, 263, 110389. [Google Scholar] [CrossRef]
- Massa, D.; Magán, J.J.; Montesano, F.F.; Tzortzakis, N. Minimizing water and nutrient losses from soilless cropping in southern Europe. Agric. Water Manag. 2020, 241, 106395. [Google Scholar] [CrossRef]
- Manríquez-Altamirano, A.; Sierra-Pérez, J.; Muñoz, P.; Gabarrell, X. Analysis of urban agriculture solid waste in the frame of circular economy: Case study of tomato crop in integrated rooftop greenhouse. Sci. Total Environ. 2020, 734, 139375. [Google Scholar] [CrossRef]
- Téllez, M.M.; Cabello, T.; Gámez, M.; Burguillo, F.J.; Rodríguez, E. Comparative study of two predatory mites Amblyseius swirskii Athias-Henriot and Transeius montdorensis (Schicha) by predator-prey models for improving biological control of greenhouse cucumber. Ecol. Model. 2020, 431, 109197. [Google Scholar] [CrossRef]
- Cama-Pinto, D.; Damas, M.; Holgado-Terriza, J.A.; Gómez-Mula, F.; Cama-Pinto, A. Path loss determination using linear and cubic regression inside a classic tomato greenhouse. Int. J. Environ. Res. Public Health 2019, 16, 1744. [Google Scholar] [CrossRef]
- Echarri, M.C.; Azpilicueta, L.; Iturri, P.L.; Aguirre, E.; Falcone, F. Performance evaluation and interference characterization of wireless sensor networks for complex high-node density scenarios. Sensors 2019, 19, 3516. [Google Scholar] [CrossRef] [PubMed]
- Rahim, H.M.; Leow, C.Y.; Rahman, T.A.; Arsad, A.; Malek, M.A. Foliage attenuation measurement at millimeter wave frequencies in tropical vegetation. In Proceedings of the 2017 IEEE 13th Malaysia International Conference on Communications (MICC), Johor Bahru, Malaysia, 28–30 November 2017; pp. 241–246. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, J.; Zhang, J. Impact of Foliage on Urban MmWave Wireless Propagation Channel: A Ray-tracing Based Analysis. In Proceedings of the 2019 International Symposium on Antennas and Propagation (ISAP), Xi’an, China, 27–30 October 2019. [Google Scholar]
- Caicedo, J.G.; Acosta, M.; Cama-Pinto, A. WSN deployment model for measuring climate variables that cause strong precipitation. Prospectiva 2015. [Google Scholar] [CrossRef]
- Popov, V. Cross-polarization effect of radio waves propagation by forest vegetation in wireless communication systems on transport. Procedia Comput. Sci. 2019, 149, 195–201. [Google Scholar] [CrossRef]
- Raheemah, A.; Sabri, N.; Salim, M.S.; Ehkan, P.; Kamaruddin, R.; Ahmad, R.B.; Jaafar, M.N.; Aljunid, S.A.; Chemat, M.H. Influences of parts of tree on propagation path losses for wsn deployment in greenhouse environments. J. Theor. Appl. Inf. Technol. 2015, 81, 552–557. [Google Scholar]
- Li, P.; Peng, Y.; Wang, J. Propagation characteristics of 2.4 GHz radio wave in greenhouse of green peppers. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2014, 45, 251–255. [Google Scholar] [CrossRef]
- Vougioukas, S.; Anastassiu, H.T.; Regen, C.; Zude, M. Influence of foliage on radio path losses (PLs) for Wireless Sensor Network (WSN) planning in orchards. Biosyst. Eng. 2013, 114, 454–465. [Google Scholar] [CrossRef]
- Raheemah, A.; Sabri, N.; Salim, M.S.; Ehkan, P.; Ahmad, R.B. New empirical path loss model for wireless sensor networks in mango greenhouses. Comput. Electron. Agric. 2016, 127, 553–560. [Google Scholar] [CrossRef]
- Montero, O.R.; Araque, J.L. Approximate modeling of Electromagnetic Propagation through Vegetation. In Proceedings of the 2018 8th IEEE-APS Topical Conference on Antennas and Propagation in Wireless Communications (APWC), Cartagena des Indias, Colombia, 10–14 September 2018; pp. 928–931. [Google Scholar] [CrossRef]
- Sabri, N.; Mohammed, S.S.; Fouad, S.; Syed, A.A.; Al-Dhief, F.T.; Raheemah, A. Investigation of Empirical Wave Propagation Models in Precision Agriculture. MATEC Web Conf. 2018, 150, 6020. [Google Scholar] [CrossRef]
- Lytaev, M.S.; Vladyko, A.G. Split-step Padé Approximations of the Helmholtz Equation for Radio Coverage Prediction over Irregular Terrain. In Proceedings of the 2018 Advances in Wireless and Optical Communications (RTUWO), Riga, Latvia, 15–16 November 2018; pp. 179–184. [Google Scholar] [CrossRef]
- Militaru, L.G.; Popescu, D.; Mateescu, C.; Ichim, L. Correlation between Distance and Frequency Bands in Hybrid Air-Ground Sensor Networks. In Proceedings of the 5th International Conference on Control, Decision and Information Technologies (CoDIT), Thessaloniki, Greece, 10–13 April 2018; pp. 247–252. [Google Scholar] [CrossRef]
- Granda, F.; Azpilicueta, L.; Vargas-Rosales, C.; Lopez-Iturri, P.; Aguirre, E.; Falcone, F. Integration of Wireless Sensor Networks in Intelligent Transportation Systems within Smart City Context. In Proceedings of the 2018 IEEE Antennas and Propagation Society International Symposium and USNC/URSI National Radio Science Meeting (APSURSI), Boston, MA, USA, 8–13 July 2018; pp. 375–376. [Google Scholar] [CrossRef]
- Montero, O.; Pantoja, J.J.; Patino, M.; Pineda, E.; Martinez, D.; Angel, G.; Cruz, J.; Suarez, M.; Vega, F. Attenuation of Radiofrequency Waves due to Vegetation in Colombia. In Proceedings of the 2018 8th IEEE-APS Topical Conference on Antennas and Propagation in Wireless Communications (APWC), Cartagena des Indias, Colombia, 10–14 September 2018; pp. 940–943. [Google Scholar] [CrossRef]
- Shutimarrungson, N.; Wuttidittachotti, P. Realistic propagation effects on wireless sensor networks for landslide management. Eurasip J. Wirel. Commun. Netw. 2019, 94. [Google Scholar] [CrossRef]
- Zolertia. Re-Mote Datasheet. 2017. Available online: https://github.com/Zolertia/Resources/wiki/RE-Mote (accessed on 23 August 2020).
- Galvan-Tejada, G.M.; Aguilar-Torrentera, J. Analysis of propagation for wireless sensor networks in outdoors. Prog. Electromagn. Res. B 2019, 83, 153–175. [Google Scholar] [CrossRef]
- Anil, G.N. Designing an Energy Efficient Routing for Subsystems Sensors in Internet of Things Eco-System Using Distributed Approach. Adv. Intell. Syst. Comput. 2020, 1224, 111–121. [Google Scholar] [CrossRef]
- Lagarias, J.C.; Reeds, J.A.; Wright, M.H.; Wright, P.E. Convergence properties of the Nelder-Mead simplex method in low dimensions. Siam J. Optim. 1998, 9, 112–147. [Google Scholar] [CrossRef]
- Provencher, S.W. A constrained regularization method for inverting data represented by linear algebraic or integral equations. Comput. Phys. Commun. 1982, 27, 213–227. [Google Scholar] [CrossRef]
- Provencher, S.W. CONTIN: A general purpose constrained regularization program for inverting noisy linear algebraic and integral equations. Comput. Phys. Commun. 1982, 27, 229–242. [Google Scholar] [CrossRef]
- Tikhonov, A.N. On the Solution of Ill-Posed Problems and the Method of Regularization. Dokl. Akad. Nauk SSSR 1963, 151, 501–504. [Google Scholar] [CrossRef][Green Version]
- Ansah, M.R.; Sowah, R.A.; Melià-Seguí, J.; Katsriku, F.A.; Vilajosana, X.; Banahene, W.O. Characterising foliage influence on LoRaWAN pathloss in a tropical vegetative environment. IET Wirel. Sens. Syst. 2020, 10, 181–197. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Equation | Description | Frequency Range |
|---|---|---|---|
| The modified exponential decay model (EDM) is the generic empirical model [13,41] | LMED = AfBdc f = Frequency (MHz) d = Vegetation depth (m) B,C = Model parameters | A, B, y C are empirical constants. This model is suggested by the International Telecommunication Union (UIT) | 30 MHz to 30 GHz |
| Weissberger [28,35,42] | LWeiss = 0.45f0.284d0 m < d < 14 m LWeiss = 1.33f0.284d0.558 14 m < d < 400 m | f is the frequency in GHz and d is the depth of the vegetation in meters | 230 MHz to 95 GHz |
| ITU-R [28] | LITU-R = 0.2f0.3 d0.6, d < 400 m. | f is the frequency in MHz and d is the depth of vegetation in meters | 200 MHz to 95 GHz |
| COST235 [28,35,42] | LCOST235 = 26.6f−0.2d0.5out-of-leaf LCOST235 = 15.6f−0.009d0.26in-leaf | f is the frequency in MHz and d is the depth of vegetation in meters, d < 200 m | 9.6 GHz to 57.6 GHz |
| Fitted ITU-R (FITU-R) Model [28,35,42] | LFITU-R = 0.37f−0.18d0.59out-of-leaf LFITU-R = 0.39f−0.39d0.25in-leaf | f is the frequency in MHz and d is the depth of vegetation in meters, | VHF to millimetric waves |
| θ | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Value | 3.89 | −0.80 | 1.09 | −1.20 | −0.63 | −4.68 | 0.55 | 0.00 | 0.00 | 0.00 |
| θ | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| Value | −0.09 | 1.01 | 0.67 | 30.07 | −0.03 | −54.33 | 0.00 | 33.72 | 0.00 | −6.22 |
| Nº Parameters | R2 | R2 Adj. | MSE | RMSE | MAPE | AIC | SBC | |
|---|---|---|---|---|---|---|---|---|
| 20 | 0.948 | 0.946 | 5.27 | 2.29 | 0.167 | 410 | 199 |
| θ | 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
|---|---|---|---|---|---|---|---|---|
| Value | −6.73 | −0.08 | 1.62 | −1.59 | −0.57 | −3.33 | 0.49 | |
| θ | 11 | 12 | 13 | 14 | 15 | 16 | 18 | 20 |
| Value | −0.12 | 1.10 | 0.30 | 100.59 | 0.00 | −167.33 | 95.02 | −17.69 |
| Nº Parameters | R2 | R2 Adj. | MSE | RMSE | MAPE | AIC | SBC | |
|---|---|---|---|---|---|---|---|---|
| 15 | 0.942 | 0.940 | 5.80 | 2.40 | 0.189 | 417 | 206 |
| Nº Parameters | R2 | R2 Adj. | MSE | RMSE | MAPE | AIC | SBC | |
|---|---|---|---|---|---|---|---|---|
| 15 | 0.942 | 0.940 | 5.80 | 2.40 | 0.189 | 417 | 206 | |
| 20 | 0.948 | 0.946 | 5.27 | 2.29 | 0.167 | 410 | 199 |
| Location | Year | R2 | R2 Adj. | MSE | RMSE | MAPE | AIC | SBC | |
|---|---|---|---|---|---|---|---|---|---|
| Cañada | 2019 | 0.921 | 0.920 | 8.745 | 2.957 | 0.408 | 445 | 234 | |
| Retamar | 2019 | 0.912 | 0.910 | 9.196 | 3.0325 | 0.261 | 449 | 237 | |
| Alquián | 2019 | 0.901 | 0.899 | 9.976 | 3.158 | 0.242 | 454 | 243 | |
| Níjar | 2019 | 0.895 | 0.892 | 11.486 | 3.389 | 0.602 | 464 | 253 | |
| Cañada | 2018 | 0.902 | 0.900 | 10.53 | 3.245 | 0.603 | 458 | 247 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cama-Pinto, D.; Damas, M.; Holgado-Terriza, J.A.; Arrabal-Campos, F.M.; Gómez-Mula, F.; Martínez-Lao, J.A.; Cama-Pinto, A. Empirical Model of Radio Wave Propagation in the Presence of Vegetation inside Greenhouses Using Regularized Regressions. Sensors 2020, 20, 6621. https://doi.org/10.3390/s20226621
Cama-Pinto D, Damas M, Holgado-Terriza JA, Arrabal-Campos FM, Gómez-Mula F, Martínez-Lao JA, Cama-Pinto A. Empirical Model of Radio Wave Propagation in the Presence of Vegetation inside Greenhouses Using Regularized Regressions. Sensors. 2020; 20(22):6621. https://doi.org/10.3390/s20226621
Chicago/Turabian StyleCama-Pinto, Dora, Miguel Damas, Juan Antonio Holgado-Terriza, Francisco Manuel Arrabal-Campos, Francisco Gómez-Mula, Juan Antonio Martínez-Lao, and Alejandro Cama-Pinto. 2020. "Empirical Model of Radio Wave Propagation in the Presence of Vegetation inside Greenhouses Using Regularized Regressions" Sensors 20, no. 22: 6621. https://doi.org/10.3390/s20226621
APA StyleCama-Pinto, D., Damas, M., Holgado-Terriza, J. A., Arrabal-Campos, F. M., Gómez-Mula, F., Martínez-Lao, J. A., & Cama-Pinto, A. (2020). Empirical Model of Radio Wave Propagation in the Presence of Vegetation inside Greenhouses Using Regularized Regressions. Sensors, 20(22), 6621. https://doi.org/10.3390/s20226621