A Fast Deploying Monitoring and Real-Time Early Warning System for the Baige Landslide in Tibet, China




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Fast Deploying Monitoring System
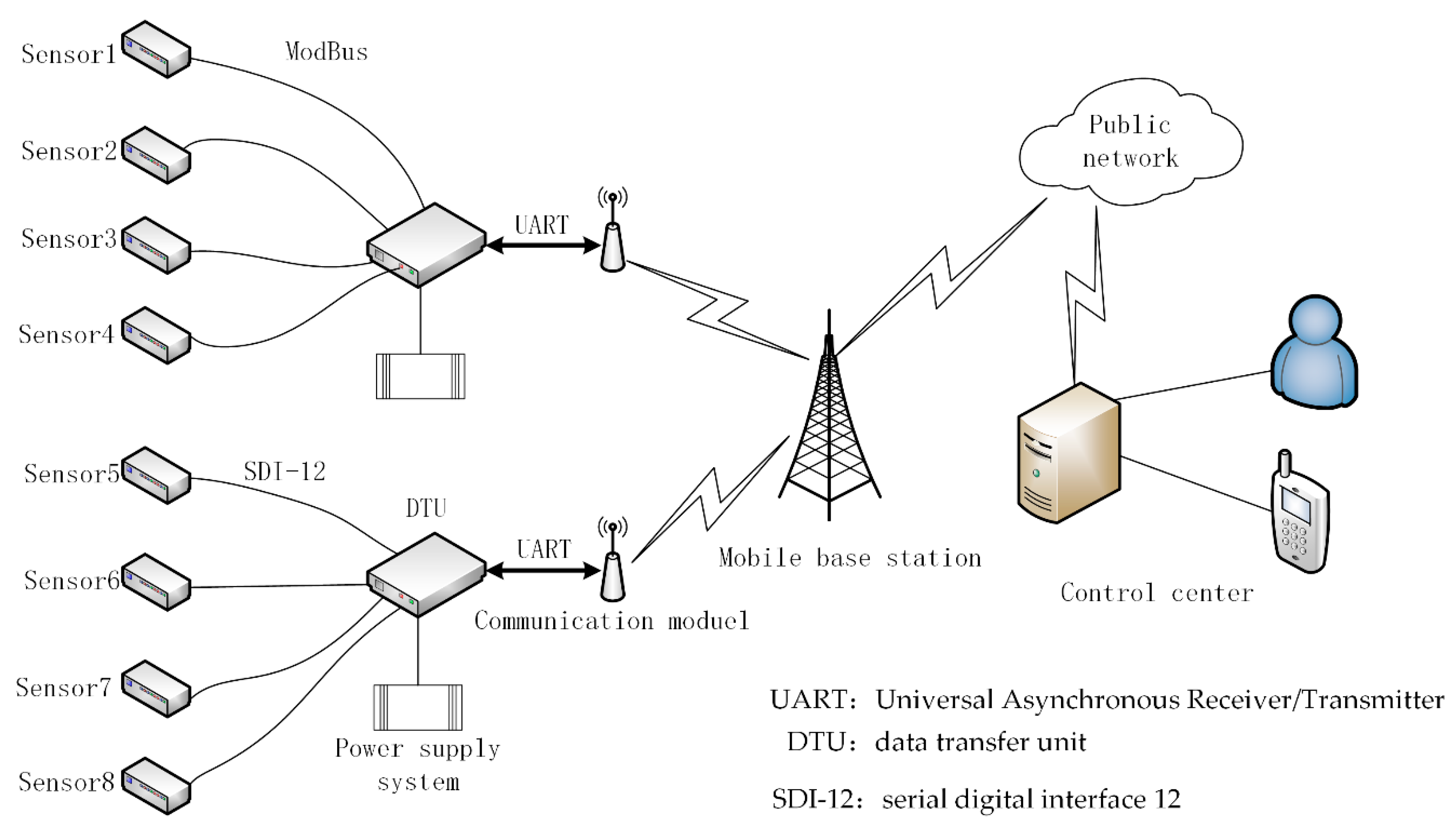
2.1. Traditional Monitor System
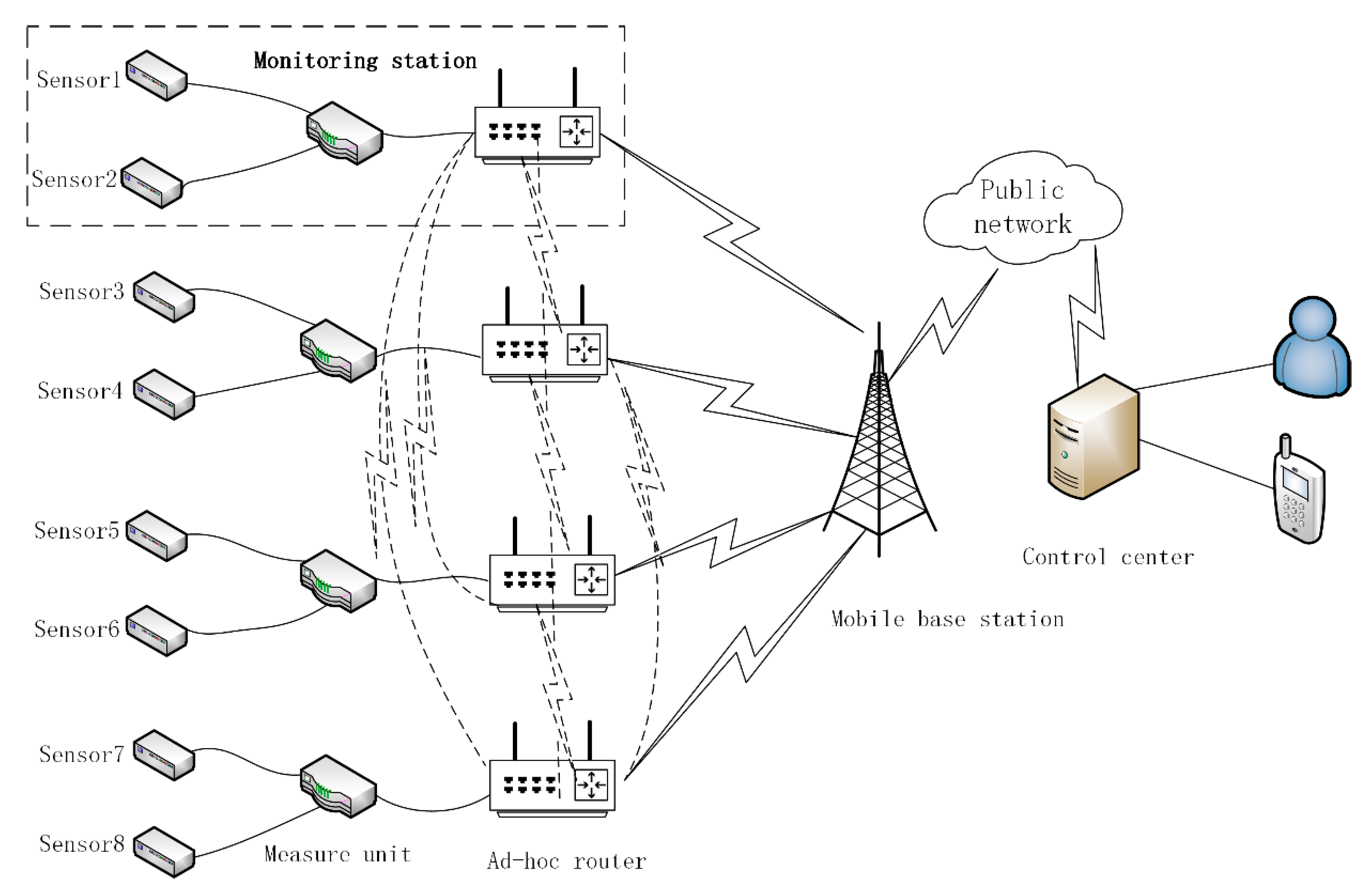
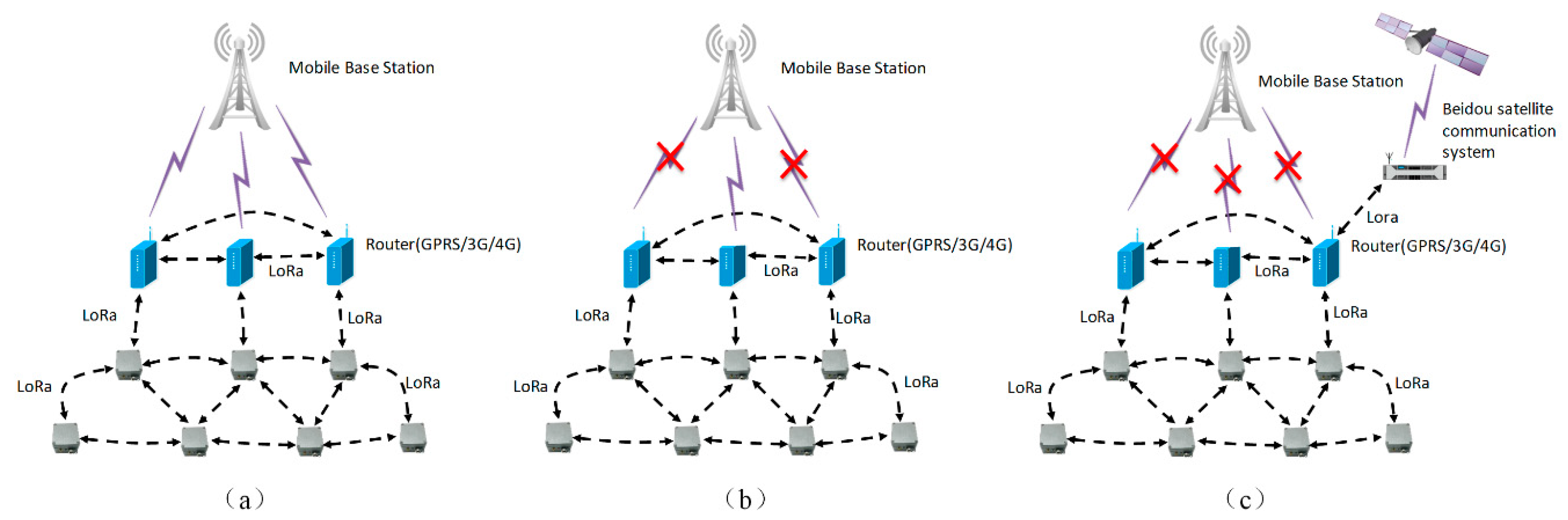
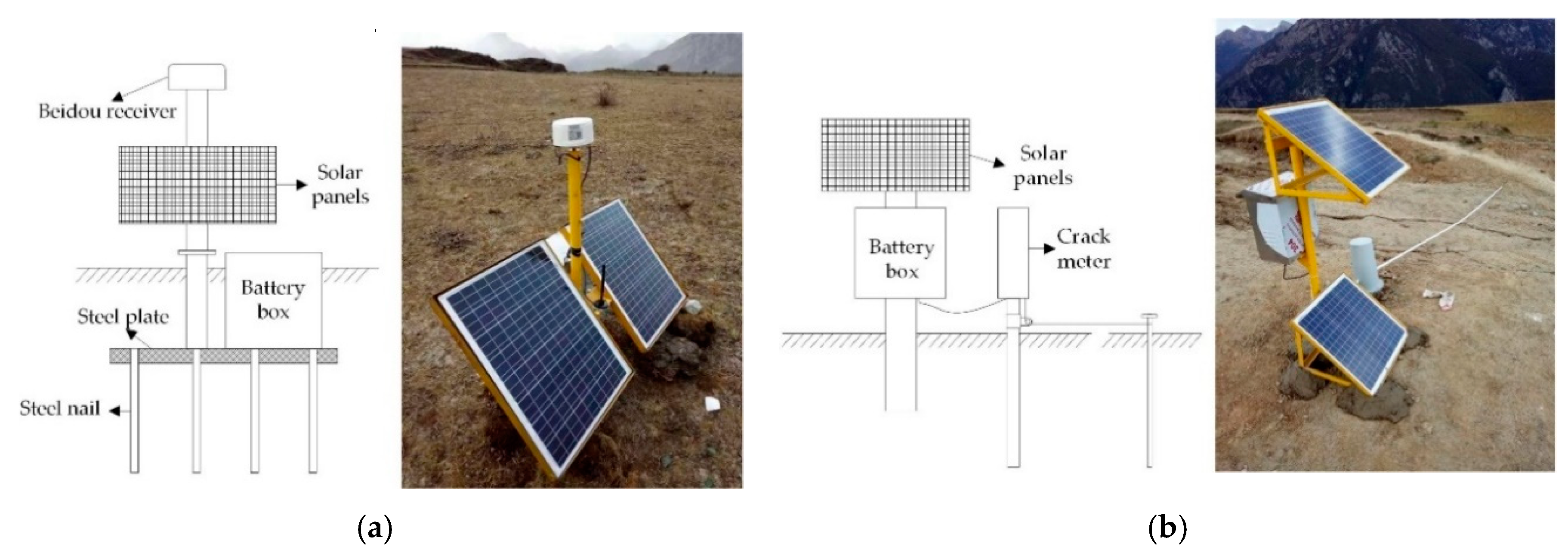
2.2. Composition of FDMS
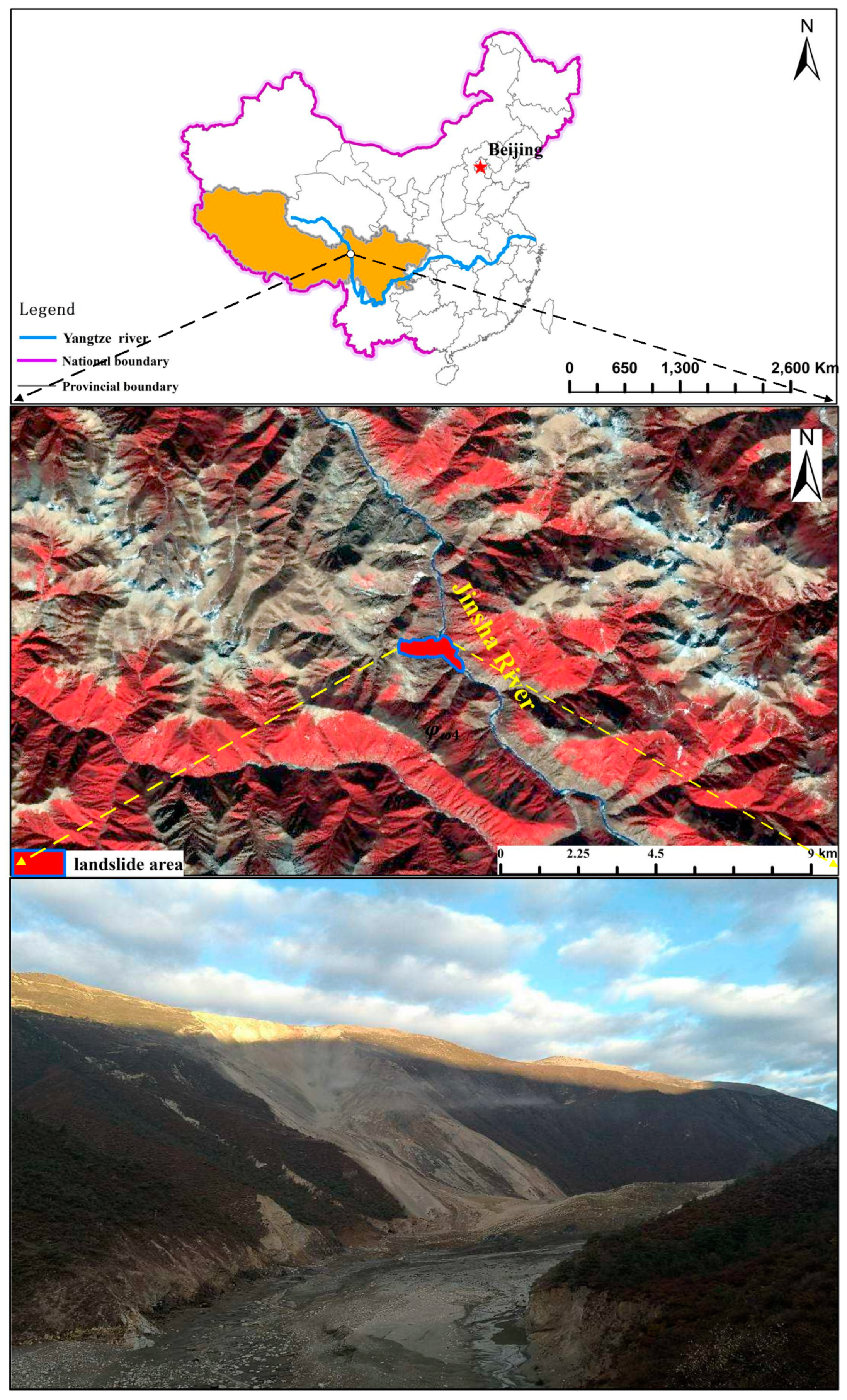
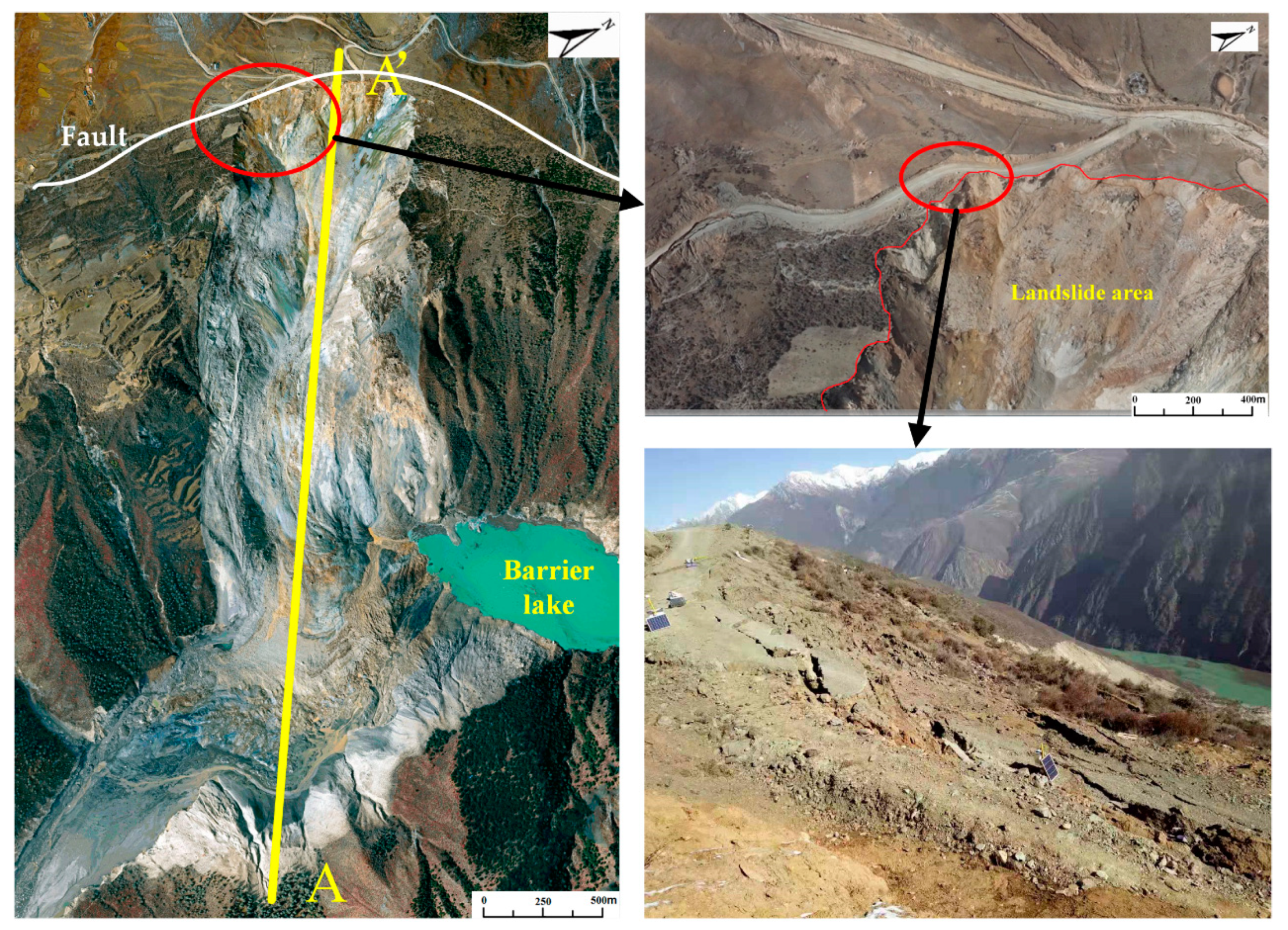
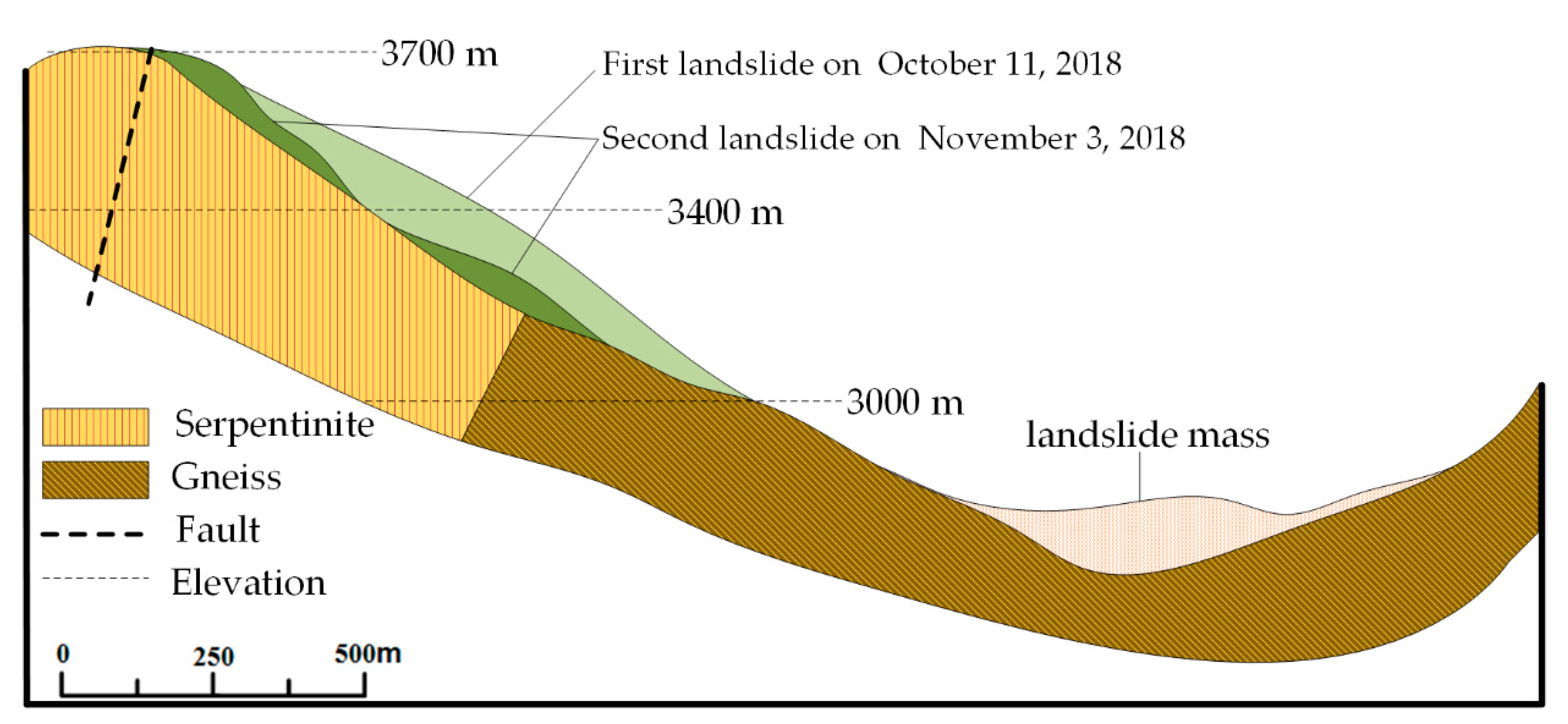
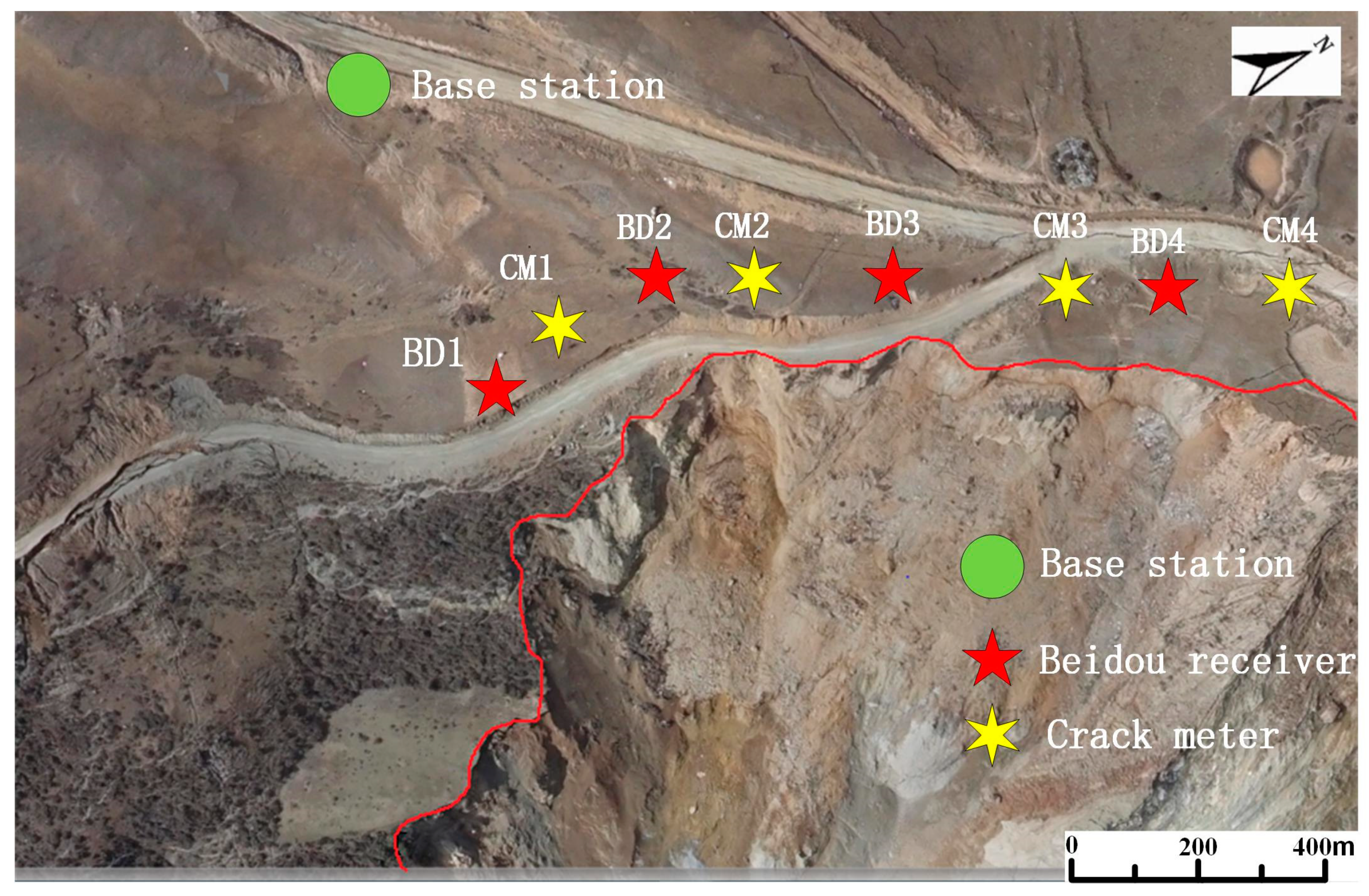
2.3. FDMS in Baige Landslide
3. Early Warning Model
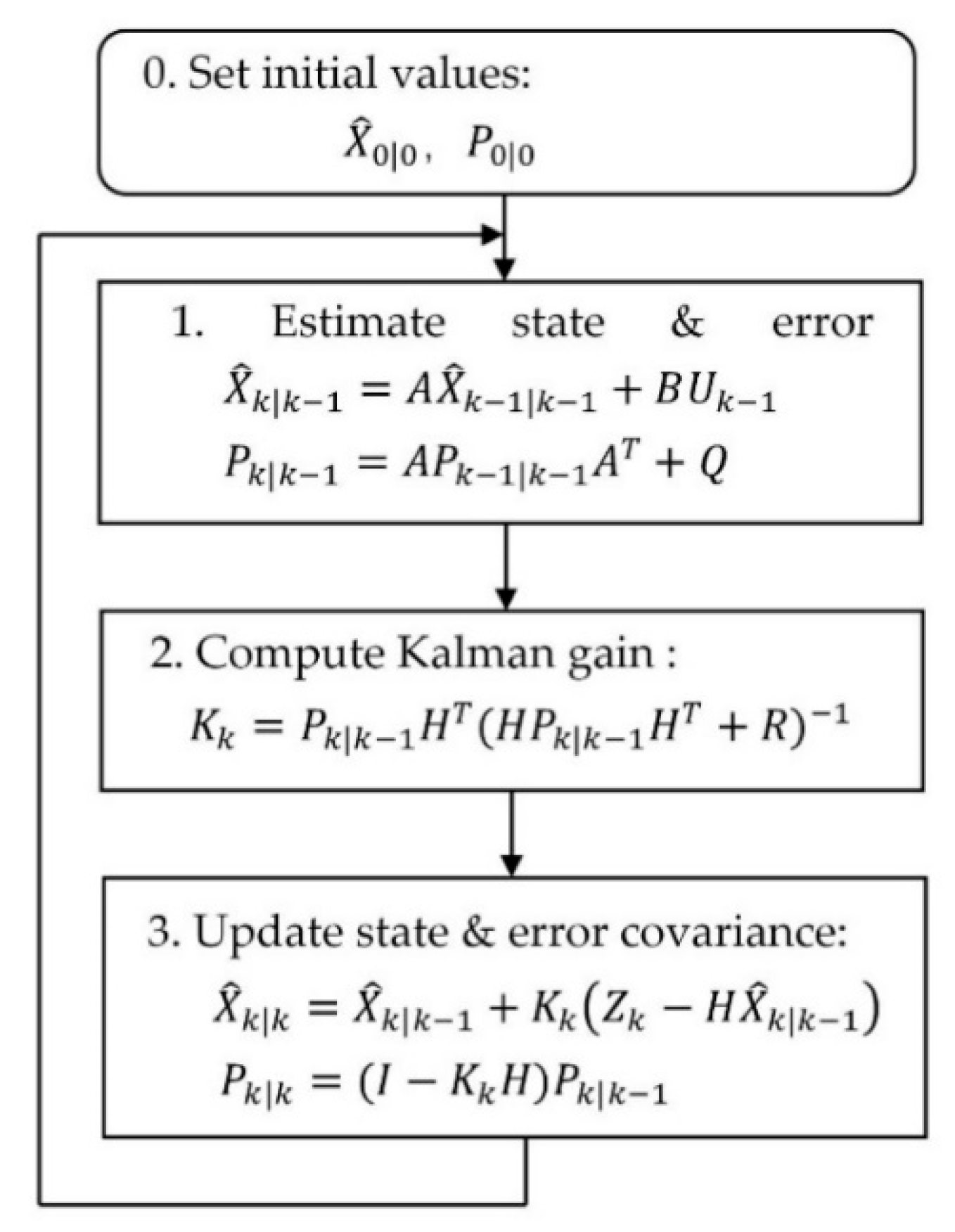
3.1. Kalman Filtering
- (a)
- When j = k, is the optimum filtering of .
- (b)
- When j > k, is the optimum predicting of .
- (c)
- When j < k, is the optimum smoothing of .
3.2. Fast Fourier Transform
3.3. Support Vector Machine
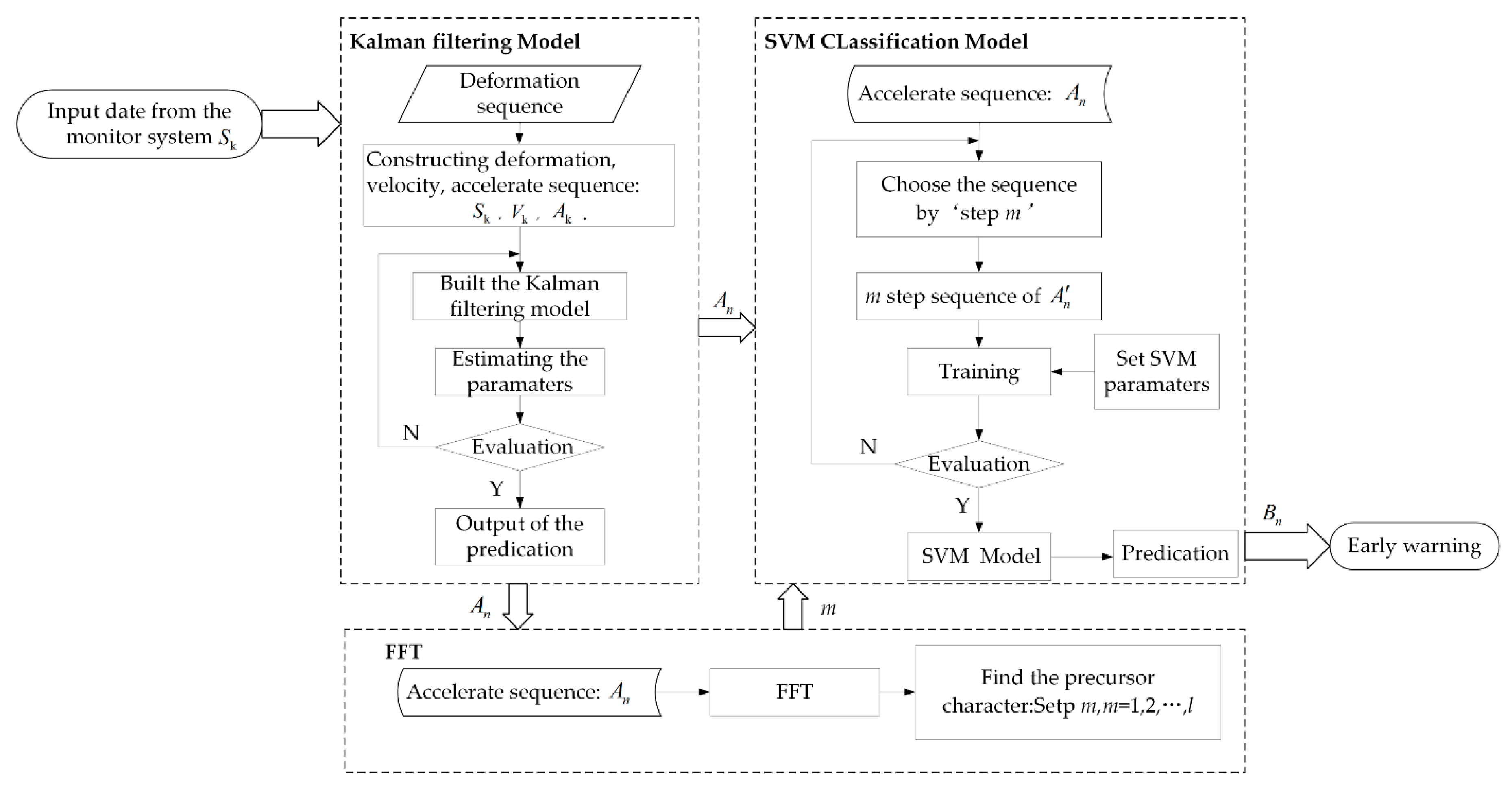
3.4. The Proposed KF-FFT-SVM Model
4. Real-Time Prediction
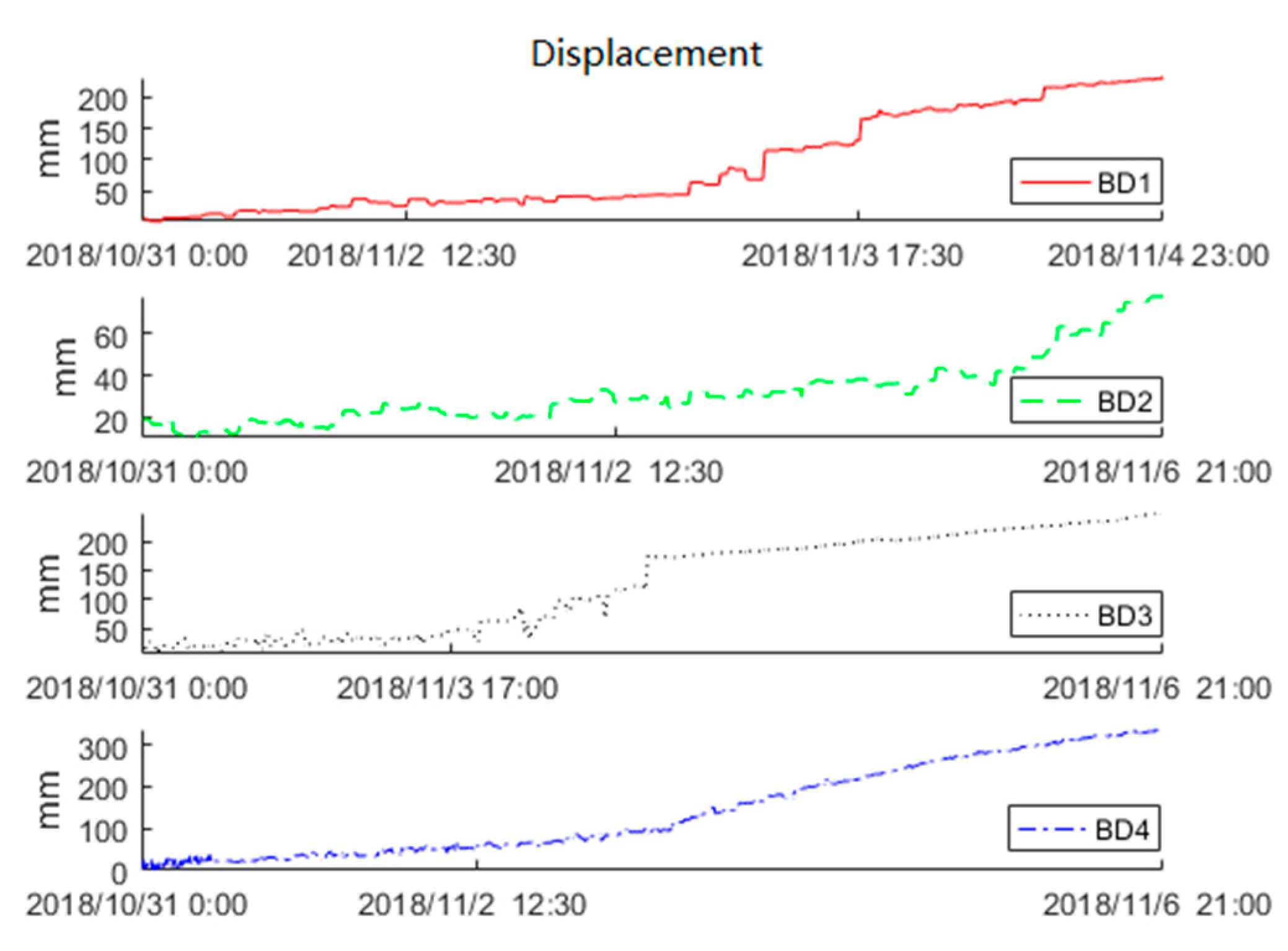
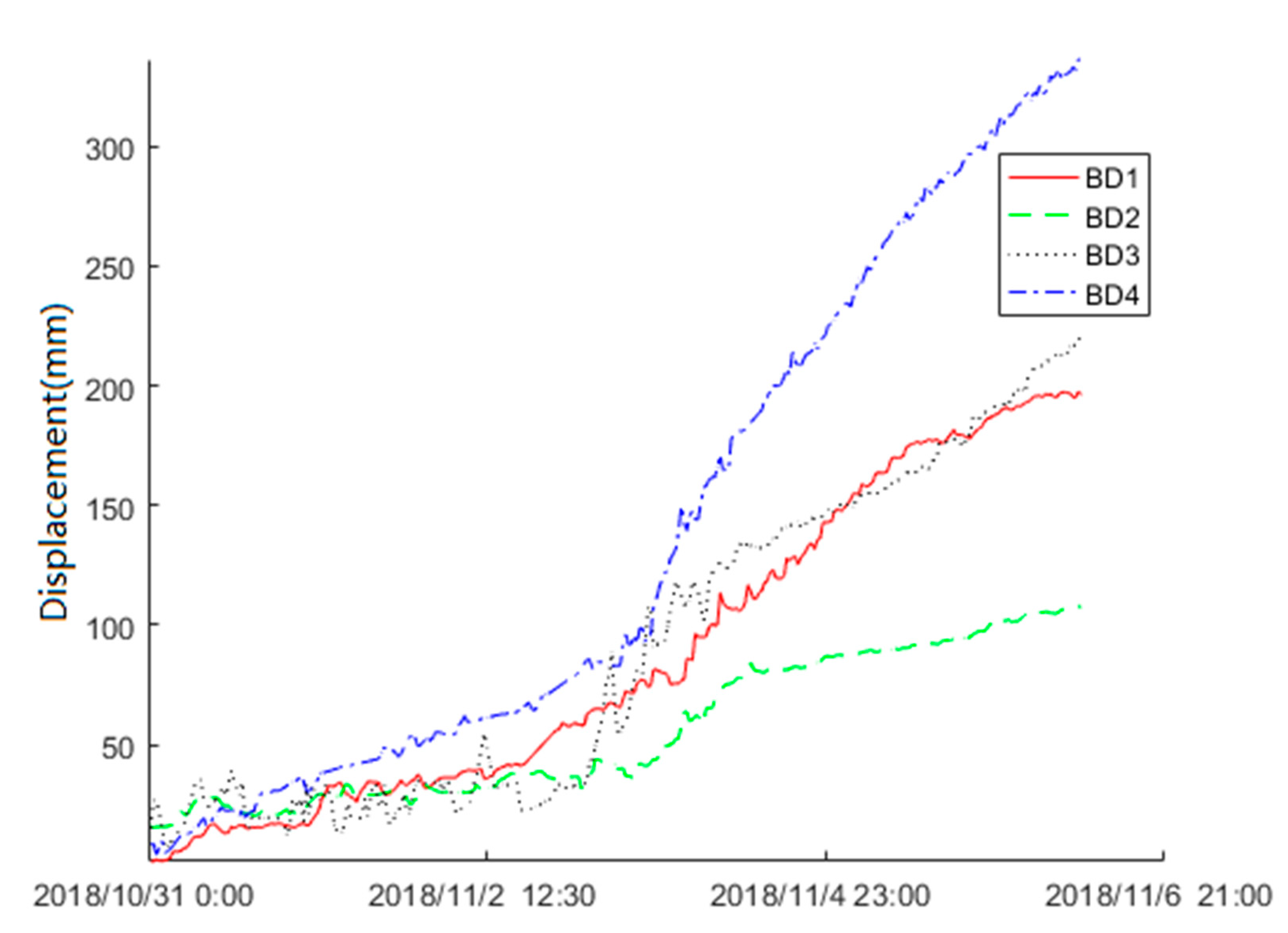
4.1. Data Pre-Processing
4.2. KF-FFT-SVM Model Building
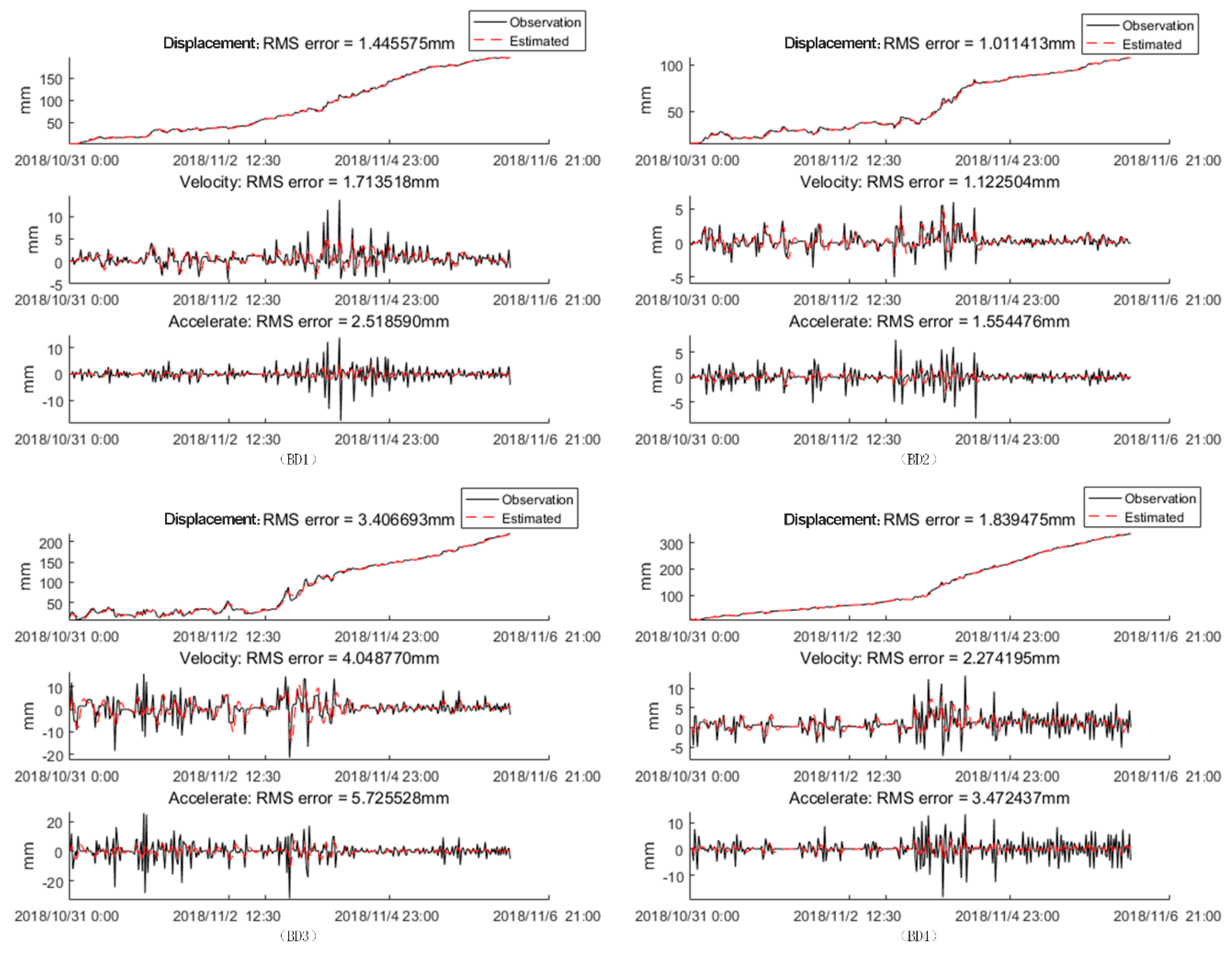
4.2.1. KF Predicting
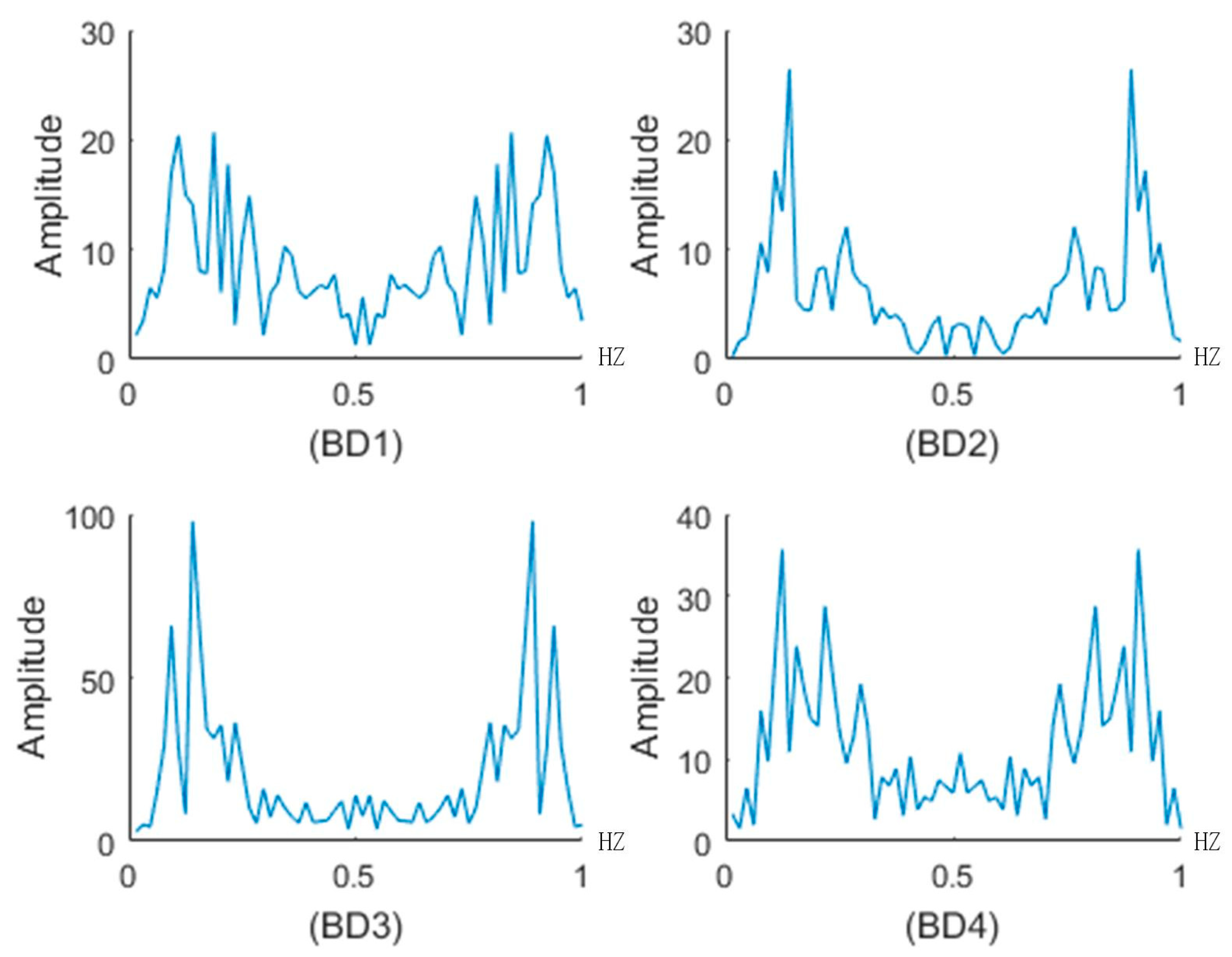
4.2.2. FFT Analysis
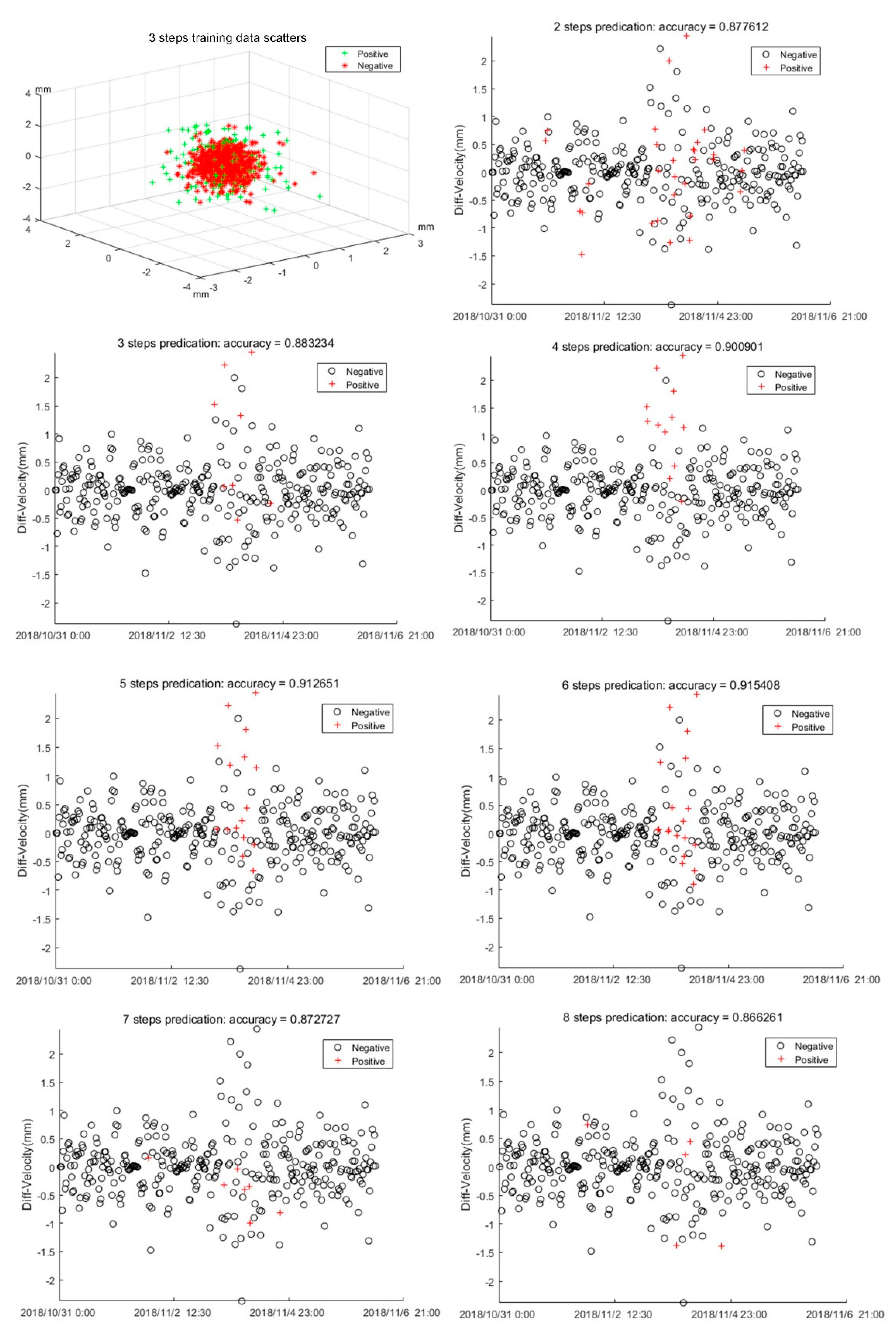
4.2.3. SVM Model Training
4.3. Application of the Real-Time Prediction Method
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Proof of Mathematical New Relationships
References
- Huang, R. Large-scale landslides and their sliding mechanisms in China since the 20th century. Chin. J. Rock Mech. Eng. 2007, 26, 433–454. [Google Scholar] [CrossRef]
- Dai, F.C.; Xu, C.; Yao, X.; Xu, L.; Tu, X.B.; Gong, Q.M. Spatial distribution of landslides triggered by the 2008 Ms 8.0 Wenchuan earthquake, China. J. Asian Earth Sci. 2011, 40, 883–895. [Google Scholar] [CrossRef]
- Bach, D.; Robert, K.; Lerner-lam, A. Advances in landslide nowcasting: Evaluation of a global and regional modeling approach. Environ. Earth Sci. 2012, 1683–1696. [Google Scholar] [CrossRef]
- Glade, T.; Nadim, F. Early warning systems for natural hazards and risks. Nat. Hazards 2014, 70, 1669–1671. [Google Scholar] [CrossRef]
- Stähli, M.; Sättele, M.; Huggel, C.; McArdell, B.W.; Lehmann, P.; Van Herwijnen, A.; Berne, A.; Schleiss, M.; Ferrari, A.; Kos, A.; et al. Monitoring and prediction in early warning systems for rapid mass movements. Nat. Hazards Earth Syst. Sci. 2015, 15, 905–917. [Google Scholar] [CrossRef]
- Piciullo, L.; Dahl, M.; Devoli, G.; Colleuille, H.; Calvello, M. Adapting the EDuMaP method to test the performance of the Norwegian early warning system for weather-induced landslides. Nat. Hazards Earth Syst. Sci. 2017, 817–831. [Google Scholar] [CrossRef]
- Piciullo, L.; Calvello, M.; Cepeda, J.M. Earth-Science Reviews Territorial early warning systems for rainfall-induced landslides. Earth-Sci. Rev. [CrossRef]
- DiBiago, E.; Kjekstad, O. Early warning, Instrumentation and Monitoring Landslides. In Proceedings of the 2nd Regional Training Course, RECLAIM II. Phuket, Thailand, 29 January–3 February 2007; p. 98. [Google Scholar]
- Baum, R.L.; Godt, J.W. Early warning of rainfall-induced shallow landslides and debris flows in the USA. Landslides 2010, 7, 259–272. [Google Scholar] [CrossRef]
- Calvello, M.; Neiva, R.; Piciullo, L.; Paes, N.; Magalhaes, M.; Alvarenga, W. International Journal of Disaster Risk Reduction The Rio de Janeiro early warning system for rainfall-induced landslides: Analysis of performance for the years 2010–2013. Int. J. Disaster Risk Reduct. 2015, 12, 3–15. [Google Scholar] [CrossRef]
- Rosi, A.; Rossi, G.; Segoni, S.; Catani, F.; Battistini, A.; Moretti, S.; Lagomarsino, D.; Casagli, N. Technical Note: An operational landslide early warning system at regional scale based on space–time-variable rainfall thresholds. Nat. Hazards Earth Syst. Sci. 2015, 15, 853–861. [Google Scholar] [CrossRef]
- Gariano, S.L.; Brunetti, M.T.; Iovine, G.; Melillo, M.; Peruccacci, S.; Terranova, O.; Vennari, C.; Guzzetti, F. Calibration and validation of rainfall thresholds for shallow landslide forecasting in Sicily, southern Italy. Geomorphology 2015, 228, 653–665. [Google Scholar] [CrossRef]
- Gariano, S.L.; Brunetti, M.T.; Piciullo, L.; Peruccacci, S.; Guzzetti, F.; Calvello, M.; Melillo, M. Definition and performance of a threshold-based regional early warning model for rainfall-induced landslides. Landslides 2016, 14, 995–1008. [Google Scholar] [CrossRef]
- Segoni, S.; Rosi, A.; Fanti, R.; Gallucci, A.; Monni, A.; Casagli, N. A regional-scale landslide warning system based on 20 years of operational experience. Water 2018, 10, 1297. [Google Scholar] [CrossRef]
- Barla, M.; Antolini, F. An integrated methodology for landslides’ early warning systems. Landslides 2016, 13, 215–228. [Google Scholar] [CrossRef]
- Lollino, G.; Arattano, M.; Cuccureddu, M. The use of the automatic inclinometric system for landslide early warning: The case of Cabella Ligure (North-Western Italy). Phys. Chem. Earth 2002, 27, 1545–1550. [Google Scholar] [CrossRef]
- Dikshit, A.; Satyam, D.N.; Towhata, I. Early warning system using tilt sensors in Chibo, Kalimpong, Darjeeling Himalayas, India. Nat. Hazards 2018, 94, 727–741. [Google Scholar] [CrossRef]
- Zhu, H.H.; Shi, B.; Zhang, C.C. FBG-based monitoring of geohazards: Current status and trends. Sensors 2017, 17, 452. [Google Scholar] [CrossRef]
- Berg, N.; Smith, A.; Russell, S.; Dixon, N.; Proudfoot, D.; Andy Take, W. Correlation of acoustic emissions with patterns of movement in an extremely slow-moving landslide at Peace River, Alberta, Canada. Can. Geotech. J. 2018, 55, 1475–1488. [Google Scholar] [CrossRef]
- Spriggs, M. Quantification of Acoustic Emission from Soils for Predicting Landslide Failure. 2005. Available online: https://hdl.handle.net/2134/10903 (accessed on 14 October 2020).
- Malet, J.P.; Maquaire, O.; Calais, E. The use of global positioning system techniques for the continuous monitoring of landslides: Application to the Super-Sauze earthflow (Alpes-de-Haute-Provence, France). Geomorphology 2002, 43, 33–54. [Google Scholar] [CrossRef]
- Tarchi, D.; Casagli, N.; Fanti, R.; Leva, D.D.; Luzi, G.; Pasuto, A.; Pieraccini, M.; Silvano, S. Landslide monitoring by using ground-based SAR interferometry an example of application to the Tessina landslide in Italy. Eng. Geol. 2003, 68, 15–30. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Atzeni, C.; Barla, M.; Pieraccini, M.; Antolini, F. Early Warning Monitoring of Natural and Engineered Slopes with Ground-Based Synthetic-Aperture Radar. Rock Mech. Rock Eng. 2015, 48, 235–246. [Google Scholar] [CrossRef]
- Supper, R.; Ottowitz, D.; Jochum, B.; Kim, J.H.; Römer, A.; Baron, I.; Pfeiler, S.; Lovisolo, M.; Gruber, S.; Vecchiotti, F. Geoelectrical monitoring: An innovative method to supplement landslide surveillance and early warning. Near Surf. Geophys. 2014, 12, 133–150. [Google Scholar] [CrossRef]
- Intrieri, E.; Gigli, G.; Mugnai, F.; Fanti, R.; Casagli, N. Design and implementation of a landslide early warning system. Eng. Geol. [CrossRef]
- Yin, Y.; Wang, H.; Gao, Y.; Li, X. Real-time monitoring and early warning of landslides at relocated Wushan Town, the Three Gorges Reservoir, China. Landslides 2010, 7, 339–349. [Google Scholar] [CrossRef]
- Thiebes, B.; Bell, R.; Glade, T.; Jäger, S.; Mayer, J.; Anderson, M.; Holcombe, L. Integration of a limit-equilibrium model into a landslide early warning system. Landslides 2014, 11, 859–875. [Google Scholar] [CrossRef]
- Carlà, T.; Farina, P.; Intrieri, E.; Botsialas, K.; Casagli, N. On the monitoring and early-warning of brittle slope failures in hard rock masses: Examples from an open-pit mine. Eng. Geol. 2017, 228, 71–81. [Google Scholar] [CrossRef]
- Intrieri, E.; Gigli, G.; Casagli, N.; Nadim, F. Brief communication Landslide Early Warning System: Toolbox and general concepts. Nat. Hazards Earth Syst. Sci. 2013, 13, 85–90. [Google Scholar] [CrossRef]
- Qiang, X.; Guang, Z.; Weile, L.; Chaoyang, H.; Xiujun, D.; Chen, G. Study on successive landslide damming events of Jinsha River in Baige Village on October 11 and November 3, 2018. J. Eng. Geol. 2018, 26, 1534–1551. [Google Scholar]
- Eid, H.T. Stability charts for uniform slopes in soils with nonlinear failure envelopes. Eng. Geol. 2014, 168, 38–45. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Niu, R.; Wang, Y.; Chen, T. A Fast Deploying Monitoring and Real-Time Early Warning System for the Baige Landslide in Tibet, China. Sensors 2020, 20, 6619. https://doi.org/10.3390/s20226619
Wu Y, Niu R, Wang Y, Chen T. A Fast Deploying Monitoring and Real-Time Early Warning System for the Baige Landslide in Tibet, China. Sensors. 2020; 20(22):6619. https://doi.org/10.3390/s20226619
Chicago/Turabian StyleWu, Yongbo, Ruiqing Niu, Yi Wang, and Tao Chen. 2020. "A Fast Deploying Monitoring and Real-Time Early Warning System for the Baige Landslide in Tibet, China" Sensors 20, no. 22: 6619. https://doi.org/10.3390/s20226619
APA StyleWu, Y., Niu, R., Wang, Y., & Chen, T. (2020). A Fast Deploying Monitoring and Real-Time Early Warning System for the Baige Landslide in Tibet, China. Sensors, 20(22), 6619. https://doi.org/10.3390/s20226619