4.1. General Concept
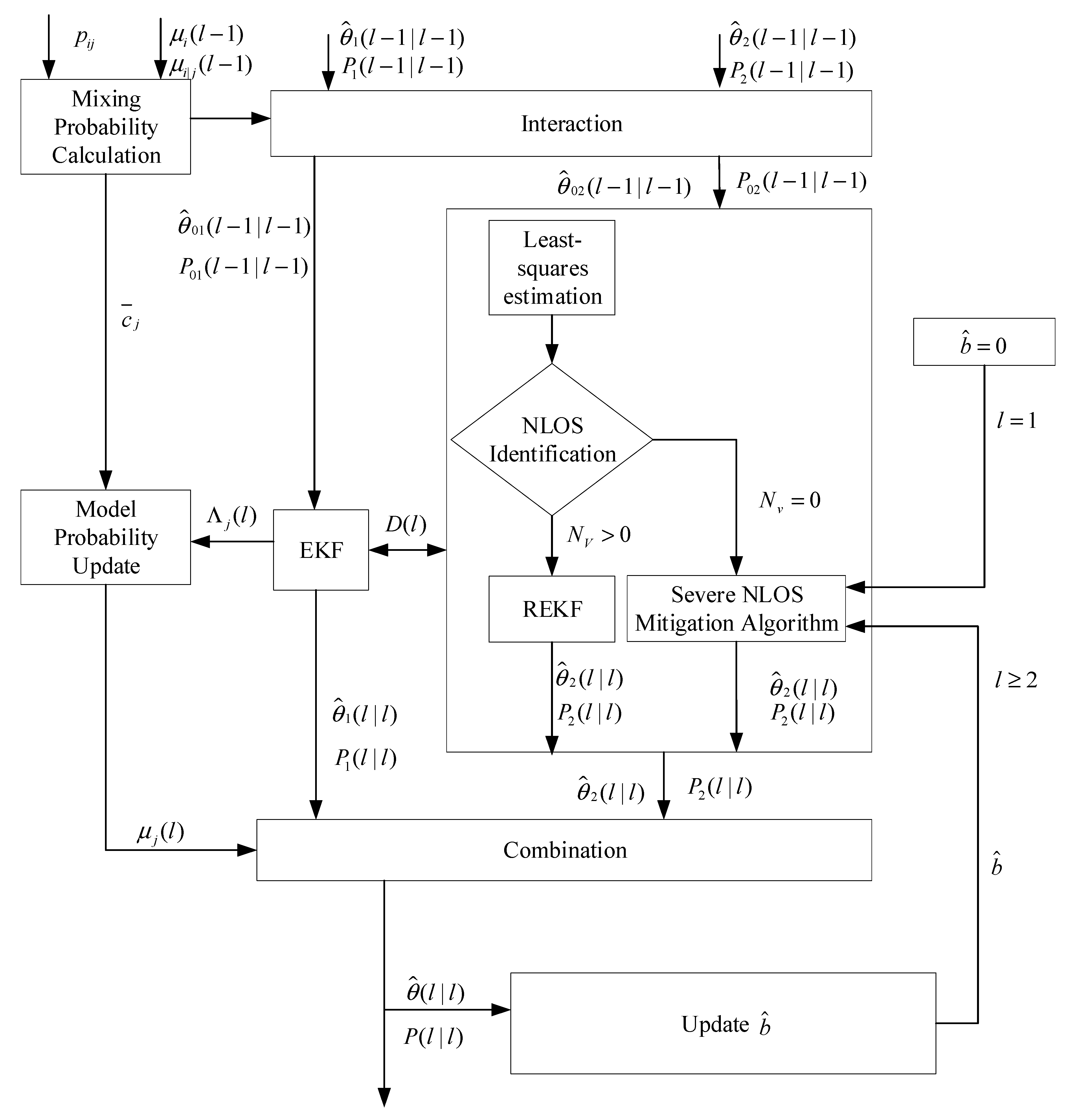
The flowchart of the proposed algorithm is illustrated in
Figure 2. Firstly, a NLOS identification strategy is proposed to detect the severity of NLOS. In this strategy, the measurements are first divided into
N different subgroups, and each subgroup separately calculates its own position estimation by the least-squares, and then NLOS identification is carried out on
N different position estimation results using the validation gate. The position estimation that can fall into the validation gate is a positioning estimation with higher positioning accuracy. We count the number
of position estimates that fall into the validation gate.
can be used to characterize the severity of NLOS. The larger
, the milder the degree of NLOS, and the smaller
, the severer the degree of NLOS. Then NLOS situations can be divided into two categories according to the severity: mild NLOS and severe NLOS. If
, there is position estimation that can fall into the validation gate, and it means that NLOS is not particularly serious, which is classified as mild NLOS. If
, no position estimation falls into the validation gate, it indicates that the NLOS is extremely serious at this time, which is classified as severe NLOS. Secondly, classification filtering, which combines EKF, REKF and the proposed severe NLOS mitigation algorithm based on LOS reconstruction, is performed to obtain respective position estimates. EKF and REKF are applied to filter LOS noise and mild NLOS noise respectively. Meanwhile, a severe NLOS mitigation algorithm based on LOS reconstruction is proposed to filter out severe NLOS noise. Finally, the IMM algorithm is employed to obtain the final positioning result by weighting the position estimation of LOS and NLOS.
4.2. Interaction and Prediction
First, the state vector
, covariance matrix
at time step
l-1 are initialized respectively [
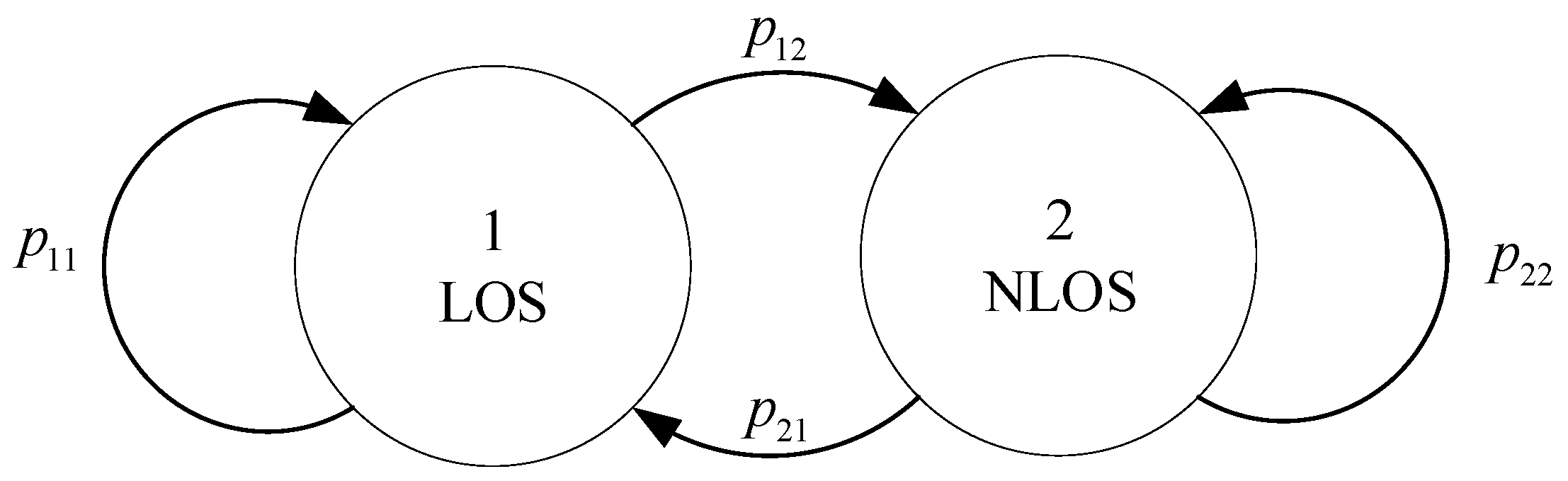
7]. Then, we need to calculate the mixed probability
, which can be obtained by the following formula:
where,
is the mode probability of the
i-th mode.
is Markov transition probability from mode
i to mode
j. Note that
{1 for LOS mode, 2 for NLOS mode}.
denotes the normalization factor, which is
Then input interaction is carried out:
where,
and
are the mixed state estimation and mixed covariance matrix for the
j-th mode-matched filter at time step
l − 1. After the interaction is completed, the algorithm starts to perform model matching.
Prediction: through the interaction process, we obtain the mixed state estimation and the mixed state covariance matrix at time step
l − 1, which are employed to compute the state prediction value and the error covariance matrix prediction value for LOS/NLOS at time step
l.
4.3. A Non-Line-of-Sight (NLOS) Identification Strategy
Before suppressing NLOS noise, a NLOS identification strategy is proposed to detect the severity of NLOS.
Since the position estimation requires at least 3 measurement values, we first divide the distance measurement values of
M beacon nodes and mobile node into
different subgroups according to 3 measurement values in each group. For each subgroup, the corresponding position estimation
is obtained through least square estimation. The position estimation prediction value
of the mobile node is calculated as follows:
where, observation matrix
, and
is the innovation of the
n-th subgroup at time step
l. After calculating the position estimation of each subgroup, we conduct NLOS identification to detect the severity of NLOS pollution.
When there is no NLOS error in all range measurements of the subgroup, then the following formula holds:
where,
represents the innovation covariance matrix of the
n-th subgroup at time step
l, calculated as follows:
To test Equation (17), we define hypothesis
and alternative hypothesis
:
If all beacon nodes of the
n-th subgroup are in LOS condition, the position estimation
can fall into the validation gate, so the hypothesis
holds. If at least one beacon node of the
n-th subgroup is in NLOS condition, the position estimation
is wrong and a higher innovation covariance will be generated, then the hypothesis
holds, and
fall outside the validation gate. In order to evaluate whether
can fall into the validation gate, we calculate the test statistic
as follows:
By comparing
with the threshold of the validation gate
, we can verify whether the position estimation
can fall into the validation gate. If
is smaller than
, then
can fall into the validation gate, the hypothesis
holds. If
is larger than
, then
falls outside the validation gate, the hypothesis
holds. The threshold
of the validation gate is related to the threshold probability
, which denotes the probability that
computed from the LOS beacon nodes falls into the validation gate.
is
where
denotes the chi-square distribution probability density function, which has two degrees of freedom, and
is warning probability. When probability
is determined, we can obtain the value of threshold
through a chi-square distribution table.
We count the number of that can fall into the validation gate, and record it as . Then, NLOS situations can be divided into two categories according to the severity: mild NLOS and severe NLOS.
If , it means that beacon nodes of the all subgroups are in LOS condition, and there is no NLOS error at this time. We will not consider this situation in the NLOS model.
If , the position estimation of some subgroups can fall into the validation gate, while the position estimation of another subgroups is polluted by NLOS, but the degree of NLOS is not extremely serious, because the position estimation of some subgroups still falls into the validation gate. This condition is classified as mild NLOS.
If , there is no position estimation of subgroup that can fall into the validation gate, which shows that at least one beacon node in each subgroup is polluted by NLOS. This condition is classified as severe NLOS.
4.5. Robust Extended Kalman Filter (REKF) Algorithm
The REKF algorithm is described as follows:
(1) Rewrite EKF equation: it was proved in available research works [
23,
25,
26] that the EKF filter can be transformed into the least square solution of linear regression problem. In order to apply robust technology, we transform EKF equation into linear regression model. Before that, we first calculate the Jacobian matrix
, the innovation
and the innovation covariance matrix
at time step
l.Then, the state equation and the measurement equation in (1) and (3) are rewritten as follows:
where,
At the same time,
satisfies:
where,
is obtained by using Cholesky decomposition for
. Then, the Equation (34) is multiplied by
to obtain the linear regression model.
where
(2) Robust regression: considering the case of the linear regression model (37) at time step
l, by solving the following coupled equation, we can obtain the maximum likelihood estimation of
.
where,
denotes the dimension of
and
is location score function. By solving Equation (37) by least-squares [
26], we can calculate the state estimation
, and the error covariance matrix
. However, the least-squares estimation is so vulnerable to outliers that we should adopt robust regression technique [
27] to solve Equation (37). Since the NLOS error is always greater than zero, the probability density function of NLOS error is asymmetric, we use the descending score function [
28] as the location score function as follows:
where
and
are the clipping points of location score function, which are selected based on the efficiency loss we are willing to pay in the LOS condition. Choosing the appropriate
makes
continuous at
. In this paper,
and
are set to 1.5 and 3, which are the same as those in [
7]. Then, the state estimation of the mobile node is calculated by iterative Newton–Raphson steps based on the location score function. The process of the algorithm is as follows:
In the first step, an initial state estimation
is computed by least-squares.
where the index
denotes the
r-th iteration.
In the second step, the initial state estimation
is used to estimate the noise residual
.
The third step is to estimate the noise scale
after obtaining the noise residual
.
where
represents the mean absolute deviation and is defined as
The fourth step is to update the state estimation by a Newton–Raphson step. The new state estimation is computed as follows:
where
In the fifth step, the convergence of the algorithm is checked according to a preset convergence condition. If the norm of the current state estimation and the last estimation is less than the required value, the iteration is stopped to obtain the final state estimation, otherwise, the above steps are repeatedly executed until convergence.
After obtaining the state estimation, the likelihood function is calculated as follows:
4.6. A Severe NLOS Mitigation Algorithm Based on Line-of-Sight (LOS) Reconstruction
The severe NLOS mitigation algorithm based on LOS reconstruction we propose is described as follows:
LOS reconstruction: When NLOS pollution is especially serious, if we can estimate the average value of NLOS error and perform LOS reconstruction on the measurements from each beacon node, the negative impact of NLOS error on positioning performance can be alleviated to a large extent. We first estimate the average value of NLOS error .
Update
: we consider the position estimation at time step
l. when
, we initialize
. When
, we use the positioning result before the current time to estimate the average value of NLOS error
. The estimation value of NLOS error at time step
l can be computed by using the position estimation
.
Since the NLOS error is a deviation greater than zero, we take the average value of all values larger than zero in the array as the estimated value at time step l.
Then the NLOS EKF filter is used to estimate the position using the measurements after LOS reconstruction.
where,
and
denote the Jacobian matrix and innovation at time step
l,
is the covariance matrix for NLOS model, and
denotes the innovation covariance matrix.
where,
represents the extended Kalman gain,
is the likelihood function.
and
are the updated state estimation and the updated error covariance matrix at time step
l.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}