Performance Evaluation of an Integrated Fuzzy-Based Driving-Support System for Real-Time Risk Management in VANETs

 ,
,  , , and
, , and
Abstract
1. Introduction
2. Background Overview and Related Work
2.1. Internet of Things
2.2. Wireless Sensor Networks
2.3. Cloud, Fog and Edge Computing
2.4. Software Defined Networking
2.5. Vehicular Ad Hoc Networks
2.6. Related Works
3. Proposed System
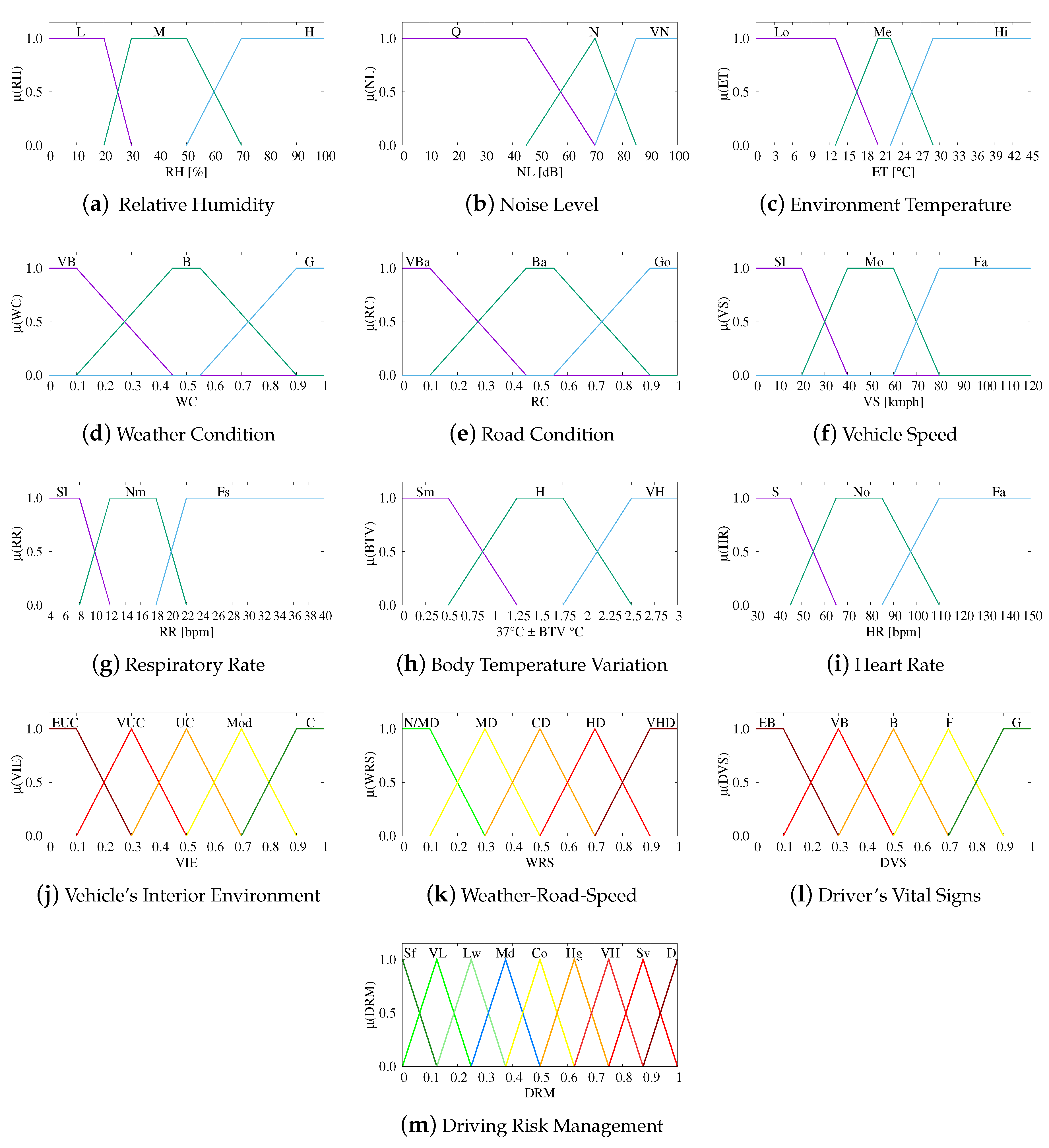
3.1. Proposed Fuzzy-Based System Description
3.2. Testbed Description
4. Proposed System Evaluation
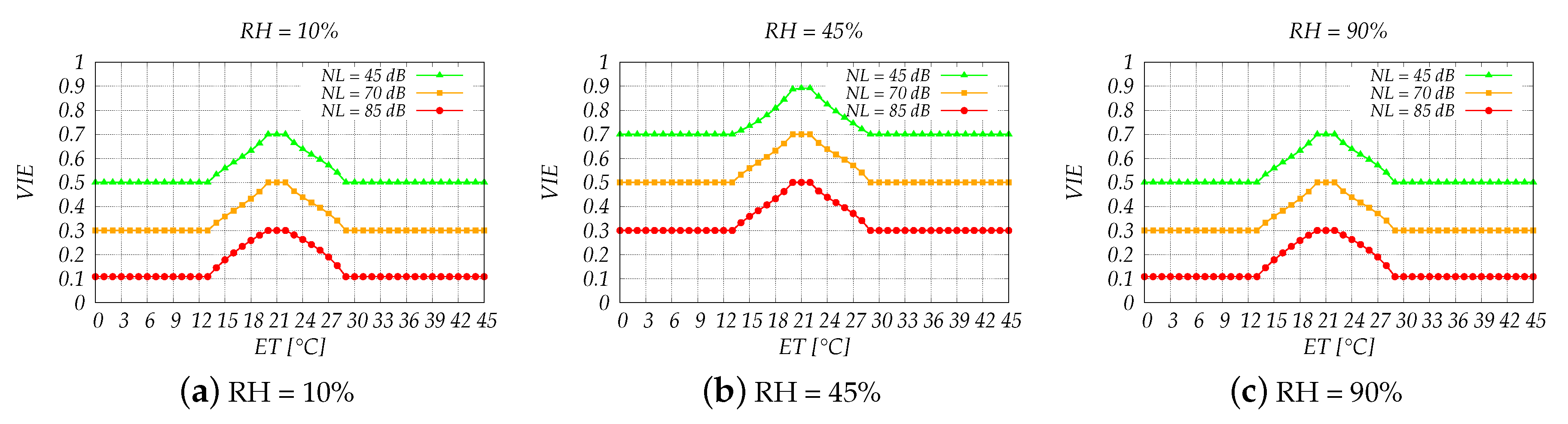
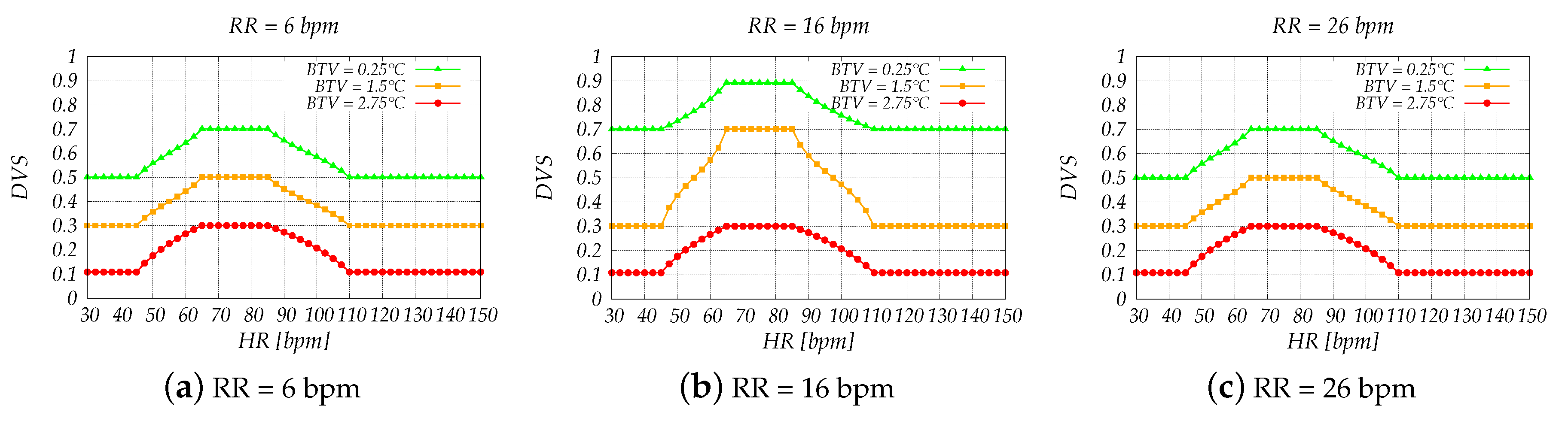
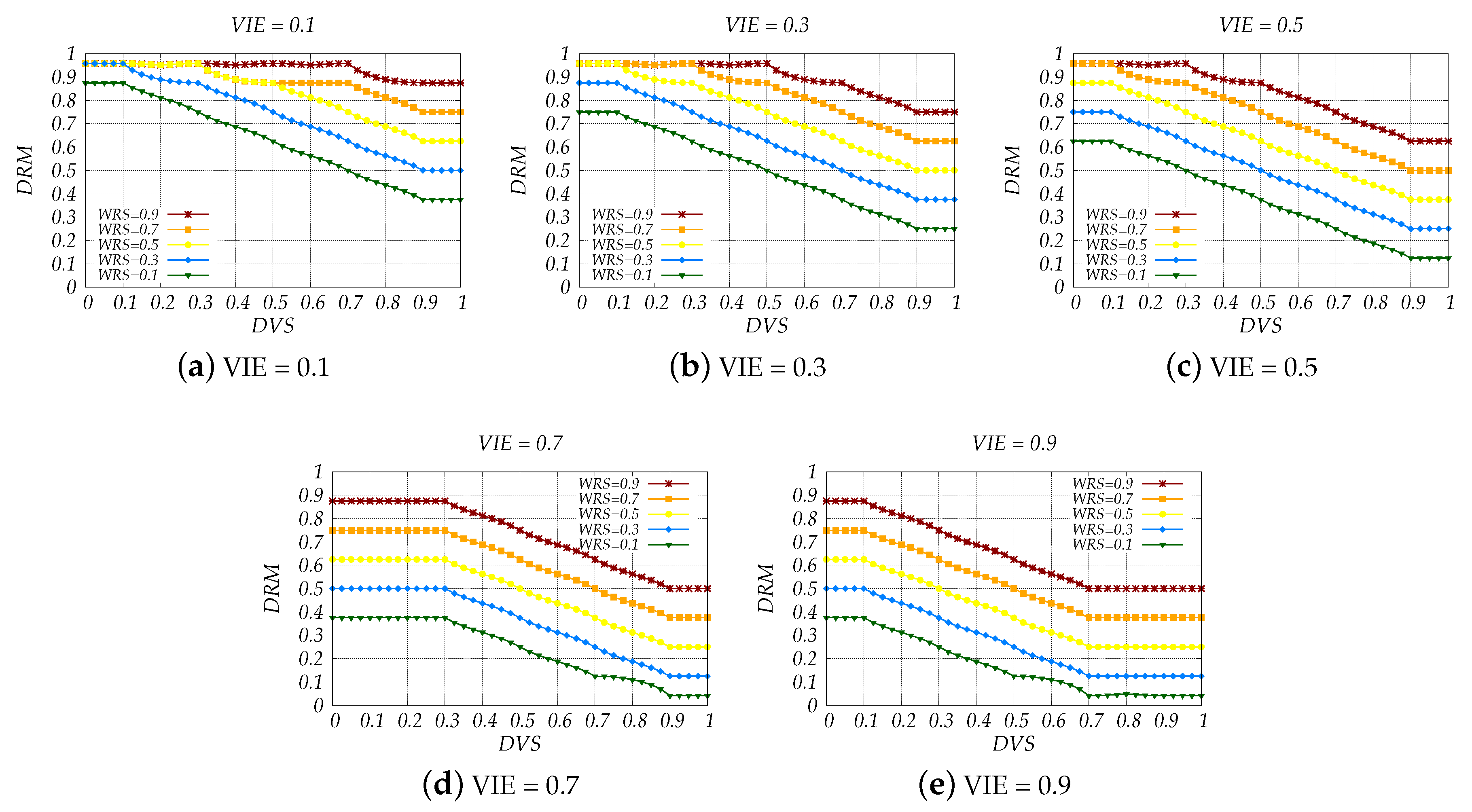
4.1. Simulation Results
4.2. Experiment Setup and Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2018: Summary; World Health Organization: Geneva, Switzerland, 2018. [Google Scholar]
- SAE On-Road Automated Driving (ORAD) Committee. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; Technical Report; Society of Automotive Engineers (SAE): Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Losilla, F.; Garcia-Sanchez, A.J.; Garcia-Sanchez, F.; Garcia-Haro, J.; Haas, Z.J. A comprehensive approach to WSN-based ITS applications: A survey. Sensors 2011, 11, 10220–10265. [Google Scholar] [CrossRef] [PubMed]
- Bonomi, F.; Milito, R.; Zhu, J.; Addepalli, S. Fog Computing and Its Role in the Internet of Things. In MCC Workshop on Mobile Cloud Computing; ACM: New York, NY, USA, 2012; pp. 13–16. [Google Scholar] [CrossRef]
- David Linthicum. Edge Computing vs. Fog Computing: Definitions and Enterprise Uses. Available online: https://www.cisco.com/c/en/us/solutions/enterprise-networks/edge-computing.html (accessed on 30 July 2020).
- Ku, I.; Lu, Y.; Gerla, M.; Gomes, R.L.; Ongaro, F.; Cerqueira, E. Towards software-defined VANET: Architecture and services. In Proceedings of the Annual Mediterranean Ad Hoc Networking Workshop, Piran, Slovenia, 2–4 June 2014; pp. 103–110. [Google Scholar] [CrossRef]
- Truong, N.B.; Lee, G.M.; Ghamri-Doudane, Y. Software defined networking-based vehicular Adhoc Network with Fog Computing. In Proceedings of the International Symposium on Integrated Network Management, Ottawa, ON, Canada, 11–15 May 2015; pp. 1202–1207. [Google Scholar] [CrossRef]
- Bylykbashi, K.; Qafzezi, E.; Ikeda, M.; Matsuo, K.; Barolli, L. Fuzzy-based Driver Monitoring System (FDMS): Implementation of two intelligent FDMSs and a testbed for safe driving in VANETs. Future Gener. Comput. Syst. 2020, 105, 665–674. [Google Scholar] [CrossRef]
- Qafzezi, E.; Bylykbashi, K.; Ikeda, M.; Matsuo, K.; Barolli, L. Coordination and Management of Cloud, Fog and Edge Resources in SDN-VANETs Using Fuzzy Logic: A Comparison Study for Two Fuzzy-based Systems. Internet Things 2020, 11, 100169. [Google Scholar] [CrossRef]
- Dong, Y.; Hu, Z.; Uchimura, K.; Murayama, N. Driver Inattention Monitoring System for Intelligent Vehicles: A Review. IEEE Trans. Intell. Transp. Syst. 2011, 12, 596–614. [Google Scholar] [CrossRef]
- Yao, K.P.; Lin, W.H.; Fang, C.Y.; Wang, J.M.; Chang, S.L.; Chen, S.W. Real-Time Vision-Based Driver Drowsiness/Fatigue Detection System. In Proceedings of the 71st Vehicular Technology Conference, Taipei, Taiwan, 16–19 May 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Ji, Q.; Zhu, Z.; Lan, P. Real-time nonintrusive monitoring and prediction of driver fatigue. IEEE Trans. Veh. Technol. 2004, 53, 1052–1068. [Google Scholar] [CrossRef]
- Bergasa, L.M.; Nuevo, J.; Sotelo, M.A.; Barea, R.; Lopez, M.E. Real-time system for monitoring driver vigilance. IEEE Trans. Intell. Transp. Syst. 2006, 7, 63–77. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, J. A new real-time eye tracking based on nonlinear unscented Kalman filter for monitoring driver fatigue. J. Control Theory Appl. 2010, 8, 181–188. [Google Scholar] [CrossRef]
- D’Orazio, T.; Leo, M.; Guaragnella, C.; Distante, A. A visual approach for driver inattention detection. Pattern Recognit. 2007, 40, 2341–2355. [Google Scholar] [CrossRef]
- Liu, D.; Sun, P.; Xiao, Y.; Yin, Y. Drowsiness Detection Based on Eyelid Movement. In Proceedings of the 2010 Second International Workshop on Education Technology and Computer Science, Wuhan, China, 6–7 March 2010; Volume 2, pp. 49–52. [Google Scholar] [CrossRef]
- Kumar, K.S.C.; Bhowmick, B. An Application for Driver Drowsiness Identification based on Pupil Detection using IR Camera. In International Conference on Intelligent Human Computer Interaction; Tiwary, U.S., Siddiqui, T.J., Radhakrishna, M., Tiwari, M.D., Eds.; Springer: Cham, Switzerland, 2009; pp. 73–82. [Google Scholar] [CrossRef]
- Smith, P.; Shah, M.; da Vitoria Lobo, N. Determining driver visual attention with one camera. IEEE Trans. Intell. Transp. Syst. 2003, 4, 205–218. [Google Scholar] [CrossRef]
- Yin, B.C.; Fan, X.; Sun, Y.F. Multiscale dynamic features based driver fatigue detection. Int. J. Pattern Recognit. Artif. Intell. 2009, 23, 575–589. [Google Scholar] [CrossRef]
- Vural, E.; Cetin, M.; Ercil, A.; Littlewort, G.; Bartlett, M.; Movellan, J. Drowsy Driver Detection Through Facial Movement Analysis. In Human–Computer Interaction; Springer: Cham, Switzerland, 2007; pp. 6–18. [Google Scholar] [CrossRef]
- Ji, Q.; Yang, X. Real-Time Eye, Gaze, and Face Pose Tracking for Monitoring Driver Vigilance. Real-Time Imaging 2002, 8, 357–377. [Google Scholar] [CrossRef]
- Cudalbu, C.; Anastasiu, B.; Radu, R.; Cruceanu, R.; Schmidt, E.; Barth, E. Driver monitoring with a single high-speed camera and IR illumination. In Proceedings of the International Symposium on Signals, Circuits and Systems (ISSCS), Iasi, Romania, 14–15 July 2005; Volume 1, pp. 219–222. [Google Scholar] [CrossRef]
- Begum, S. Intelligent driver monitoring systems based on physiological sensor signals: A review. In Proceedings of the International Conference on Intelligent Transportation Systems (ITSC), Las Palmas, Spain, 15–18 September 2013; pp. 282–289. [Google Scholar] [CrossRef]
- Miyaji, M.; Kawanaka, H.; Oguri, K. Driver’s cognitive distraction detection using physiological features by the adaboost. In Proceedings of the International Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Liang, W.; Yuan, J.; Sun, D.; Lin, M. Changes in Physiological Parameters Induced by Indoor Simulated Driving: Effect of Lower Body Exercise at Mid-Term Break. Sensors 2009, 9, 6913–6933. [Google Scholar] [CrossRef] [PubMed]
- Hernando, A.; Lázaro, J.; Gil, E.; Arza, A.; Garzón, J.M.; López-Antón, R.; de la Cámara, C.; Laguna, P.; Aguiló, J.; Bailón, R. Inclusion of Respiratory Frequency Information in Heart Rate Variability Analysis for Stress Assessment. IEEE J. Biomed. Health Inform. 2016, 20, 1016–1025. [Google Scholar] [CrossRef] [PubMed]
- Zhong, Y.-J.; Du, L.-P.; Zhang, K.; Sun, X.-H. Localized energy study for analyzing driver fatigue state based on wavelet analysis. In Proceedings of the International Conference on Wavelet Analysis and Pattern Recognition, Beijing, China, 2–4 November 2007; Volume 4, pp. 1843–1846. [Google Scholar] [CrossRef]
- Takei, Y.; Furukawa, Y. Estimate of driver’s fatigue through steering motion. In Proceedings of the International Conference on Systems, Man and Cybernetics, Waikoloa, HI, USA, 12 October 2005; Volume 2, pp. 1765–1770. [Google Scholar] [CrossRef]
- Zhao, S.; Xu, G.; Tao, T. Detecting of Driver’s Drowsiness Using Multiwavelet Packet Energy Spectrum. In Proceedings of the International Congress on Image and Signal Processing, Tianjin, China, 17–19 October 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Wakita, T.; Ozawa, K.; Miyajima, C.; Igarashi, K.; Itou, K.; Takeda, K.; Itakura, F. Driver identification using driving behavior signals. In Proceedings of the Intelligent Transportation Systems, Vienna, Austria, 16 September 2005; pp. 396–401. [Google Scholar] [CrossRef]
- Torkkola, K.; Massey, N.; Wood, C. Driver inattention detection through intelligent analysis of readily available sensors. In Proceedings of the International Conference on Intelligent Transportation Systems, Washington, WA, USA, 3–6 October 2004; pp. 326–331. [Google Scholar] [CrossRef]
- Ersal, T.; Fuller, H.J.A.; Tsimhoni, O.; Stein, J.L.; Fathy, H.K. Model-Based Analysis and Classification of Driver Distraction Under Secondary Tasks. IEEE Trans. Intell. Transp. Syst. 2010, 11, 692–701. [Google Scholar] [CrossRef]
- Lee, B.G.; Chung, W.Y. A Smartphone-Based Driver Safety Monitoring System Using Data Fusion. Sensors 2012, 12, 17536–17552. [Google Scholar] [CrossRef] [PubMed]
- Senaratne, R.; Hardy, D.; Vanderaa, B.; Halgamuge, S. Driver Fatigue Detection by Fusing Multiple Cues. In Advances in Neural Networks–ISNN 2007; Springer: Cham, Switzerland, 2007; pp. 801–809. [Google Scholar] [CrossRef]
- Kandel, A. Fuzzy Expert Systems; CRC Press, Inc.: Boca Raton, FL, USA, 1992. [Google Scholar]
- Zimmermann, H.J. Fuzzy Set Theory and Its Applications; Springer Science & Business Media: New York, NY, USA, 1996. [Google Scholar] [CrossRef]
- McNeill, F.M.; Thro, E. Fuzzy Logic: A Practical Approach; Academic Press Professional, Inc.: San Diego, CA, USA, 1994. [Google Scholar] [CrossRef]
- Zadeh, L.A.; Kacprzyk, J. Fuzzy Logic for the Management of Uncertainty; John Wiley & Sons, Inc.: New York, NY, USA, 1992. [Google Scholar]
- Klir, G.J.; Folger, T.A. Fuzzy Sets, Uncertainty, and Information; Prentice Hall, Inc.: Upper Saddle River, NJ, USA, 1987. [Google Scholar]
- Munakata, T.; Jani, Y. Fuzzy Systems: An Overview. Commun. ACM 1994, 37, 69–77. [Google Scholar] [CrossRef]
- Gładyszewska-Fiedoruk, K.; Teleszewski, T.J. Modeling of Humidity in Passenger Cars Equipped with Mechanical Ventilation. Energies 2020, 13, 2987. [Google Scholar] [CrossRef]
- Landström, U.; Englund, K.; Nordström, B.; Stenudd, A. Use of Temperature Variations to Combat Drivers’ Drowsiness. Percept. Mot. Skills 2002, 95, 497–506. [Google Scholar] [CrossRef] [PubMed]
- U.S. Department of Transportation, Federal Highway Administration. How Do Weather Events Impact Roads? Available online: https://ops.fhwa.dot.gov/weather/q1_roadimpact.htm (accessed on 20 September 2020).
- Sato, G.; Sakuraba, A.; Uchida, N.; Shibata, Y. A new road state information platform based on crowed sensing on challenged network environments. Internet Things 2020, 100214. [Google Scholar] [CrossRef]
- Solaz, J.; Laparra-Hernández, J.; Bande, D.; Rodríguez, N.; Veleff, S.; Gerpe, J.; Medina, E. Drowsiness detection based on the analysis of breathing rate obtained from real-time image recognition. Transp. Res. Procedia 2016, 14, 3867–3876. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | RH | NL | ET | VIE | No. | RH | NL | ET | VIE | No. | RH | NL | ET | VIE |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | L | Q | Lo | UC | 10 | M | Q | Lo | Mod | 19 | H | Q | Lo | UC |
| 2 | L | Q | Me | Mod | 11 | M | Q | Me | C | 20 | H | Q | Me | Mod |
| 3 | L | Q | Hi | UC | 12 | M | Q | Hi | Mod | 21 | H | Q | Hi | UC |
| 4 | L | N | Lo | VUC | 13 | M | N | Lo | UC | 22 | H | N | Lo | VUC |
| 5 | L | N | Me | UC | 14 | M | N | Me | Mod | 23 | H | N | Me | UC |
| 6 | L | N | Hi | VUC | 15 | M | N | Hi | UC | 24 | H | N | Hi | VUC |
| 7 | L | VN | Lo | EUC | 16 | M | VN | Lo | VUC | 25 | H | VN | Lo | EUC |
| 8 | L | VN | Me | VUC | 17 | M | VN | Me | UC | 26 | H | VN | Me | VUC |
| 9 | L | VN | Hi | EUC | 18 | M | VN | Hi | VUC | 27 | H | VN | Hi | EUC |
| No. | WC | RC | VS | WRS | No. | WC | RC | VS | WRS | No. | WC | RC | VS | WRS |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | VB | VBa | Sl | CD | 10 | B | VBa | Sl | MD | 19 | G | VBa | Sl | N/MD |
| 2 | VB | VBa | Mo | VHD | 11 | B | VBa | Mo | HD | 20 | G | VBa | Mo | MD |
| 3 | VB | VBa | Fa | VHD | 12 | B | VBa | Fa | VHD | 21 | G | VBa | Fa | HD |
| 4 | VB | Ba | Sl | CD | 13 | B | Ba | Sl | MD | 22 | G | Ba | Sl | N/MD |
| 5 | VB | Ba | Mo | CD | 14 | B | Ba | Mo | CD | 23 | G | Ba | Mo | MD |
| 6 | VB | Ba | Fa | VHD | 15 | B | Ba | Fa | HD | 24 | G | Ba | Fa | CD |
| 7 | VB | Go | Sl | MD | 16 | B | Go | Sl | N/MD | 25 | G | Go | Sl | N/MD |
| 8 | VB | Go | Mo | CD | 17 | B | Go | Mo | MD | 26 | G | Go | Mo | N/MD |
| 9 | VB | Go | Fa | HD | 18 | B | Go | Fa | CD | 27 | G | Go | Fa | MD |
| No. | RR | BTV | HR | DVS | No. | RR | BTV | HR | DVS | No. | RR | BTV | HR | DVS |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | Sl | Sm | S | B | 10 | Nm | Sm | S | F | 19 | Fs | Sm | S | B |
| 2 | Sl | Sm | No | F | 11 | Nm | Sm | No | G | 20 | Fs | Sm | No | F |
| 3 | Sl | Sm | Fa | B | 12 | Nm | Sm | Fa | F | 21 | Fs | Sm | Fa | B |
| 4 | Sl | H | S | VB | 13 | Nm | H | S | VB | 22 | Fs | H | S | VB |
| 5 | Sl | H | No | B | 14 | Nm | H | No | F | 23 | Fs | H | No | B |
| 6 | Sl | H | Fa | VB | 15 | Nm | H | Fa | VB | 24 | Fs | H | Fa | VB |
| 7 | Sl | VH | S | EB | 16 | Nm | VH | S | EB | 25 | Fs | VH | S | EB |
| 8 | Sl | VH | No | VB | 17 | Nm | VH | No | VB | 26 | Fs | VH | No | VB |
| 9 | Sl | VH | Fa | EB | 18 | Nm | VH | Fa | EB | 27 | Fs | VH | Fa | EB |
| No. | VIE | WRS | DVS | DRM | No. | VIE | WRS | DVS | DRM | No. | VIE | WRS | DVS | DRM |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | EUC | N/MD | EB | Sv | 43 | VUC | HD | B | Sv | 85 | Mod | MD | G | VL |
| 2 | EUC | N/MD | VB | VH | 44 | VUC | HD | F | VH | 86 | Mod | CD | EB | Hg |
| 3 | EUC | N/MD | B | Hg | 45 | VUC | HD | G | Hg | 87 | Mod | CD | VB | Hg |
| 4 | EUC | N/MD | F | Co | 46 | VUC | VHD | EB | D | 88 | Mod | CD | B | Co |
| 5 | EUC | N/MD | G | Md | 47 | VUC | VHD | VB | D | 89 | Mod | CD | F | Md |
| 6 | EUC | MD | EB | D | 48 | VUC | VHD | B | D | 90 | Mod | CD | G | Lw |
| 7 | EUC | MD | VB | Sv | 49 | VUC | VHD | F | Sv | 91 | Mod | HD | EB | VH |
| 8 | EUC | MD | B | VH | 50 | VUC | VHD | G | VH | 92 | Mod | HD | VB | VH |
| 9 | EUC | MD | F | Hg | 51 | UC | N/MD | EB | Hg | 93 | Mod | HD | B | Hg |
| 10 | EUC | MD | G | Co | 52 | UC | N/MD | VB | Co | 94 | Mod | HD | F | Co |
| 11 | EUC | CD | EB | D | 53 | UC | N/MD | B | Md | 95 | Mod | HD | G | Md |
| 12 | EUC | CD | VB | D | 54 | UC | N/MD | F | Lw | 96 | Mod | VHD | EB | Sv |
| 13 | EUC | CD | B | Sv | 55 | UC | N/MD | G | VL | 97 | Mod | VHD | VB | Sv |
| 14 | EUC | CD | F | VH | 56 | UC | MD | EB | VH | 98 | Mod | VHD | B | VH |
| 15 | EUC | CD | G | Hg | 57 | UC | MD | VB | Hg | 99 | Mod | VHD | F | Hg |
| 16 | EUC | HD | EB | D | 58 | UC | MD | B | Co | 100 | Mod | VHD | G | Co |
| 17 | EUC | HD | VB | D | 59 | UC | MD | F | Md | 101 | C | N/MD | EB | Md |
| 18 | EUC | HD | B | Sv | 60 | UC | MD | G | Lw | 102 | C | N/MD | VB | Lw |
| 19 | EUC | HD | F | Sv | 61 | UC | CD | EB | Sv | 103 | C | N/MD | B | VL |
| 20 | EUC | HD | G | VH | 62 | UC | CD | VB | VH | 104 | C | N/MD | F | Sf |
| 21 | EUC | VHD | EB | D | 63 | UC | CD | B | Hg | 105 | C | N/MD | G | Sf |
| 22 | EUC | VHD | VB | D | 64 | UC | CD | F | Co | 106 | C | MD | EB | Co |
| 23 | EUC | VHD | B | D | 65 | UC | CD | G | Md | 107 | C | MD | VB | Md |
| 24 | EUC | VHD | F | D | 66 | UC | HD | EB | D | 108 | C | MD | B | Lw |
| 25 | EUC | VHD | G | Sv | 67 | UC | HD | VB | Sv | 109 | C | MD | F | VL |
| 26 | VUC | N/MD | EB | VH | 68 | UC | HD | B | VH | 110 | C | MD | G | VL |
| 27 | VUC | N/MD | VB | Hg | 69 | UC | HD | F | Hg | 111 | C | CD | EB | Hg |
| 28 | VUC | N/MD | B | Co | 70 | UC | HD | G | Co | 112 | C | CD | VB | Co |
| 29 | VUC | N/MD | F | Md | 71 | UC | VHD | EB | D | 113 | C | CD | B | Md |
| 30 | VUC | N/MD | G | Lw | 72 | UC | VHD | VB | D | 114 | C | CD | F | Lw |
| 31 | VUC | MD | EB | Sv | 73 | UC | VHD | B | Sv | 115 | C | CD | G | Lw |
| 32 | VUC | MD | VB | VH | 74 | UC | VHD | F | VH | 116 | C | HD | EB | VH |
| 33 | VUC | MD | B | Hg | 75 | UC | VHD | G | Hg | 117 | C | HD | VB | Hg |
| 34 | VUC | MD | F | Co | 76 | Mod | N/MD | EB | Md | 118 | C | HD | B | Co |
| 35 | VUC | MD | G | Md | 77 | Mod | N/MD | VB | Md | 119 | C | HD | F | Md |
| 36 | VUC | CD | EB | D | 78 | Mod | N/MD | B | Lw | 120 | C | HD | G | Md |
| 37 | VUC | CD | VB | Sv | 79 | Mod | N/MD | F | VL | 121 | C | VHD | EB | Sv |
| 38 | VUC | CD | B | VH | 80 | Mod | N/MD | G | Sf | 122 | C | VHD | VB | VH |
| 39 | VUC | CD | F | Hg | 81 | Mod | MD | EB | Co | 123 | C | VHD | B | Hg |
| 40 | VUC | CD | G | Co | 82 | Mod | MD | VB | Co | 124 | C | VHD | F | Co |
| 41 | VUC | HD | EB | D | 83 | Mod | MD | B | Md | 125 | C | VHD | G | Co |
| 42 | VUC | HD | VB | D | 84 | Mod | MD | F | Lw |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bylykbashi, K.; Qafzezi, E.; Ampririt, P.; Ikeda, M.; Matsuo, K.; Barolli, L. Performance Evaluation of an Integrated Fuzzy-Based Driving-Support System for Real-Time Risk Management in VANETs. Sensors 2020, 20, 6537. https://doi.org/10.3390/s20226537
Bylykbashi K, Qafzezi E, Ampririt P, Ikeda M, Matsuo K, Barolli L. Performance Evaluation of an Integrated Fuzzy-Based Driving-Support System for Real-Time Risk Management in VANETs. Sensors. 2020; 20(22):6537. https://doi.org/10.3390/s20226537
Chicago/Turabian StyleBylykbashi, Kevin, Ermioni Qafzezi, Phudit Ampririt, Makoto Ikeda, Keita Matsuo, and Leonard Barolli. 2020. "Performance Evaluation of an Integrated Fuzzy-Based Driving-Support System for Real-Time Risk Management in VANETs" Sensors 20, no. 22: 6537. https://doi.org/10.3390/s20226537
APA StyleBylykbashi, K., Qafzezi, E., Ampririt, P., Ikeda, M., Matsuo, K., & Barolli, L. (2020). Performance Evaluation of an Integrated Fuzzy-Based Driving-Support System for Real-Time Risk Management in VANETs. Sensors, 20(22), 6537. https://doi.org/10.3390/s20226537