Magnetic Field Gradient-Based EKF for Velocity Estimation in Indoor Navigation


Abstract
1. Introduction
1.1. Context
1.2. Contribution
2. Problem Formulation
2.1. Notation
- A local inertial frame fixed to the Earth (Earth rotation is neglected) and its associated orthonormal basis; ;
- A body frame attached to the moving rigid body and its associated orthonormal basis. .
- The angular velocity , of with respect to , measured by a 3-axis gyroscope. The corresponding skew-symmetric matrix is defined such as
- The acceleration of , measured by a 3-axis accelerometer;
- The magnetic field , measured in by a 3-axis magnetometer, which depends on time and space;
- The Jacobian matrix , which represents the magnetic field gradient, measured on a fixed point and defined by
2.2. Magnetic Field and Its Gradient
3. Inertial Velocity, Magnetic Field and Magnetic Field Gradient Estimation
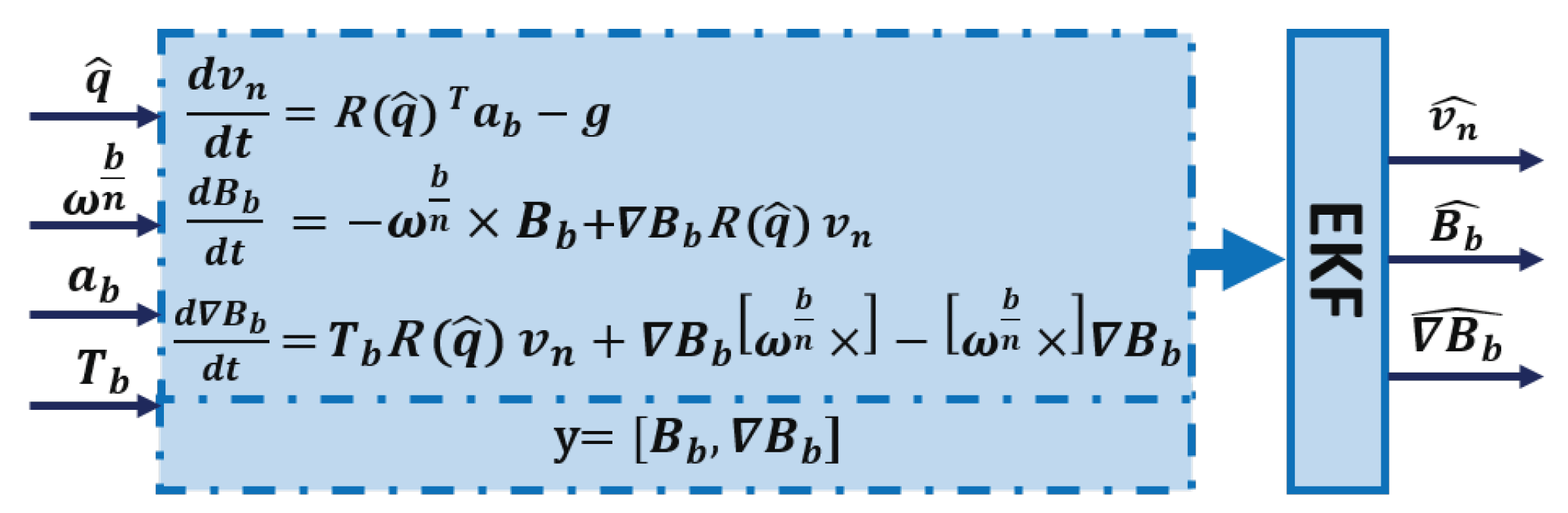
3.1. Magnetic Field Gradient-Based Ekf
3.2. Quaternion Estimation
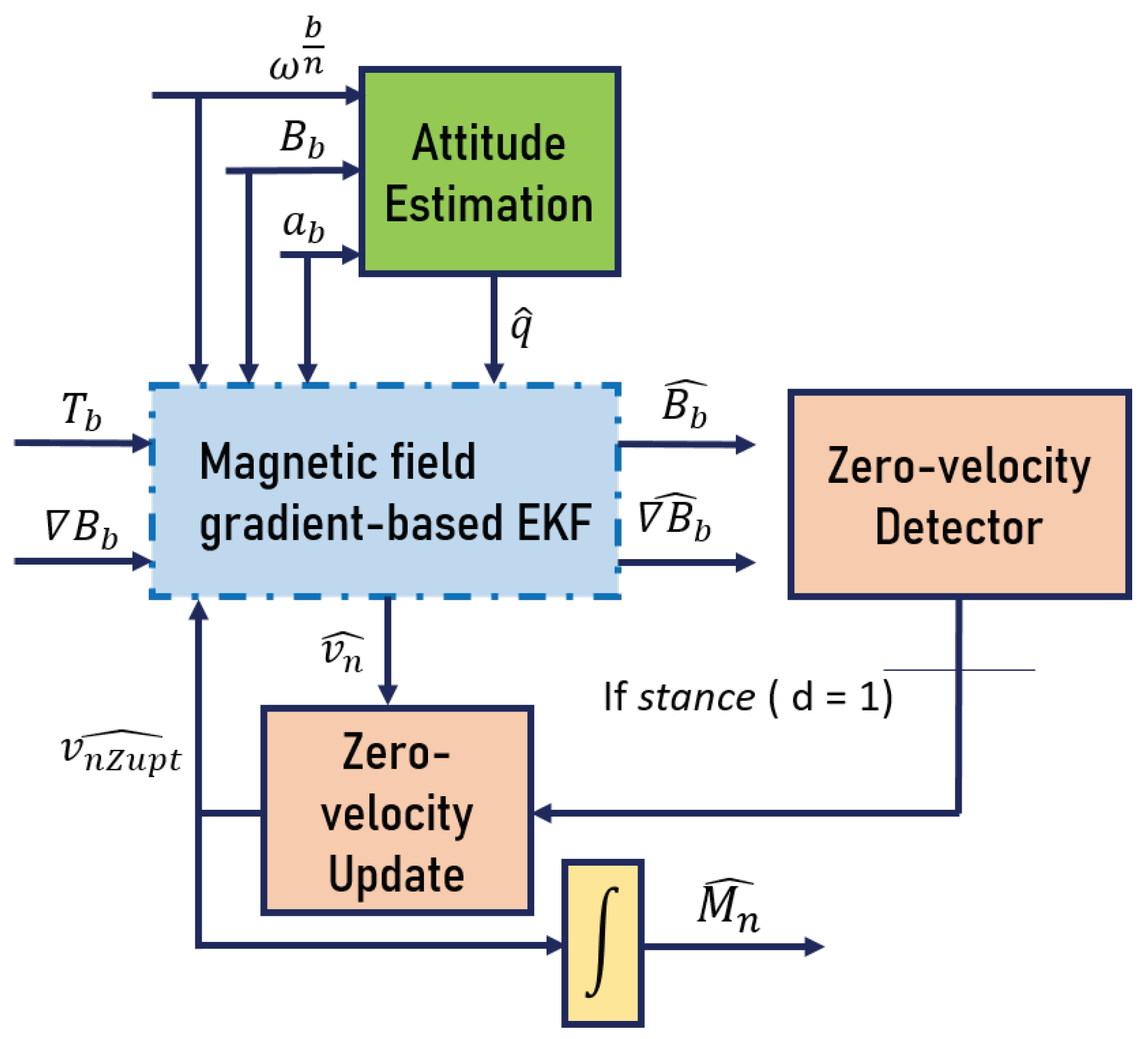
4. Position Estimation in the Context of Foot-Mounted Inertial Navigation
4.1. Zero-Velocity Detector
4.2. Zupt
5. Simulations and Results
5.1. Groundwork for Simulations
5.2. Main Results
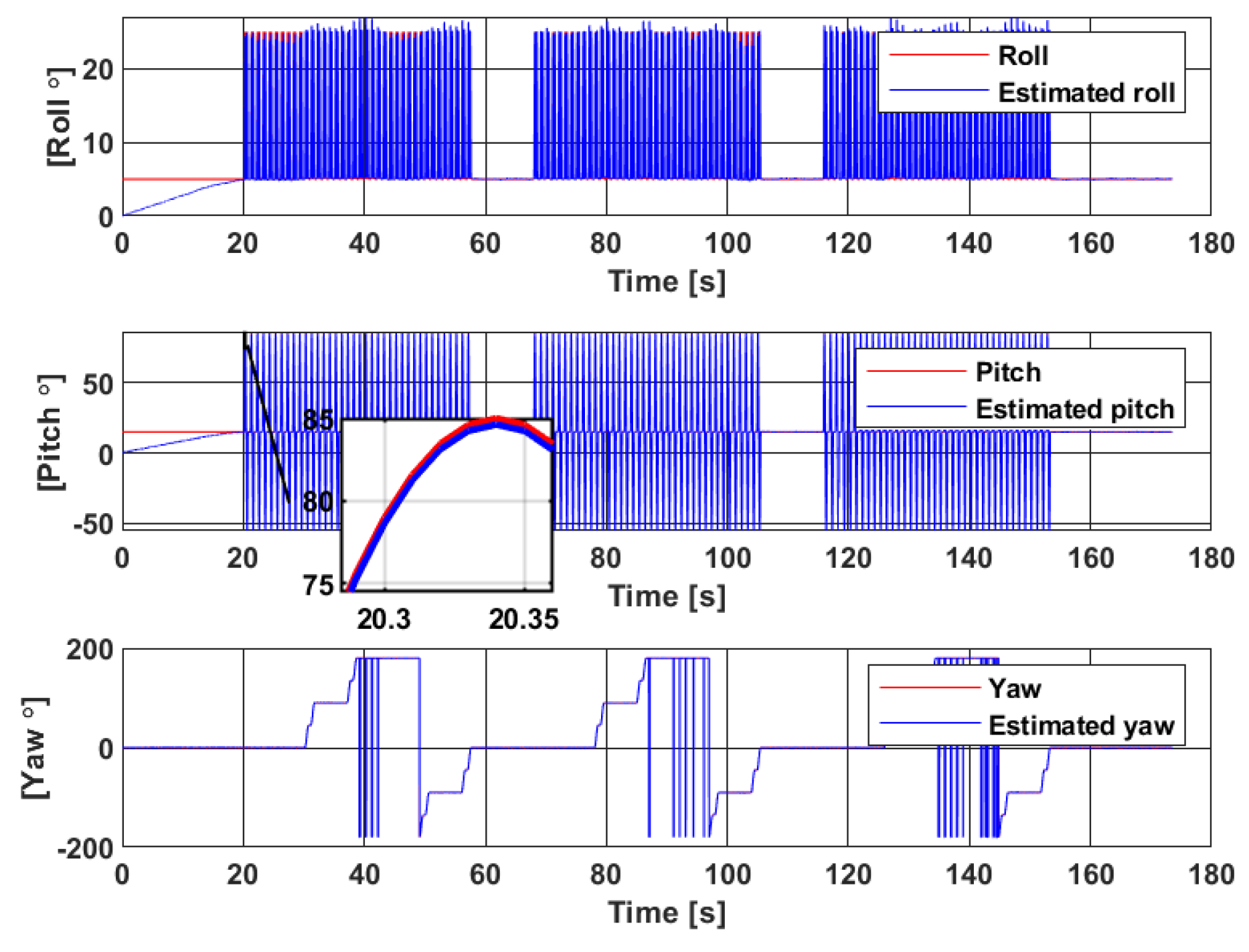
5.2.1. Attitude Estimation Results
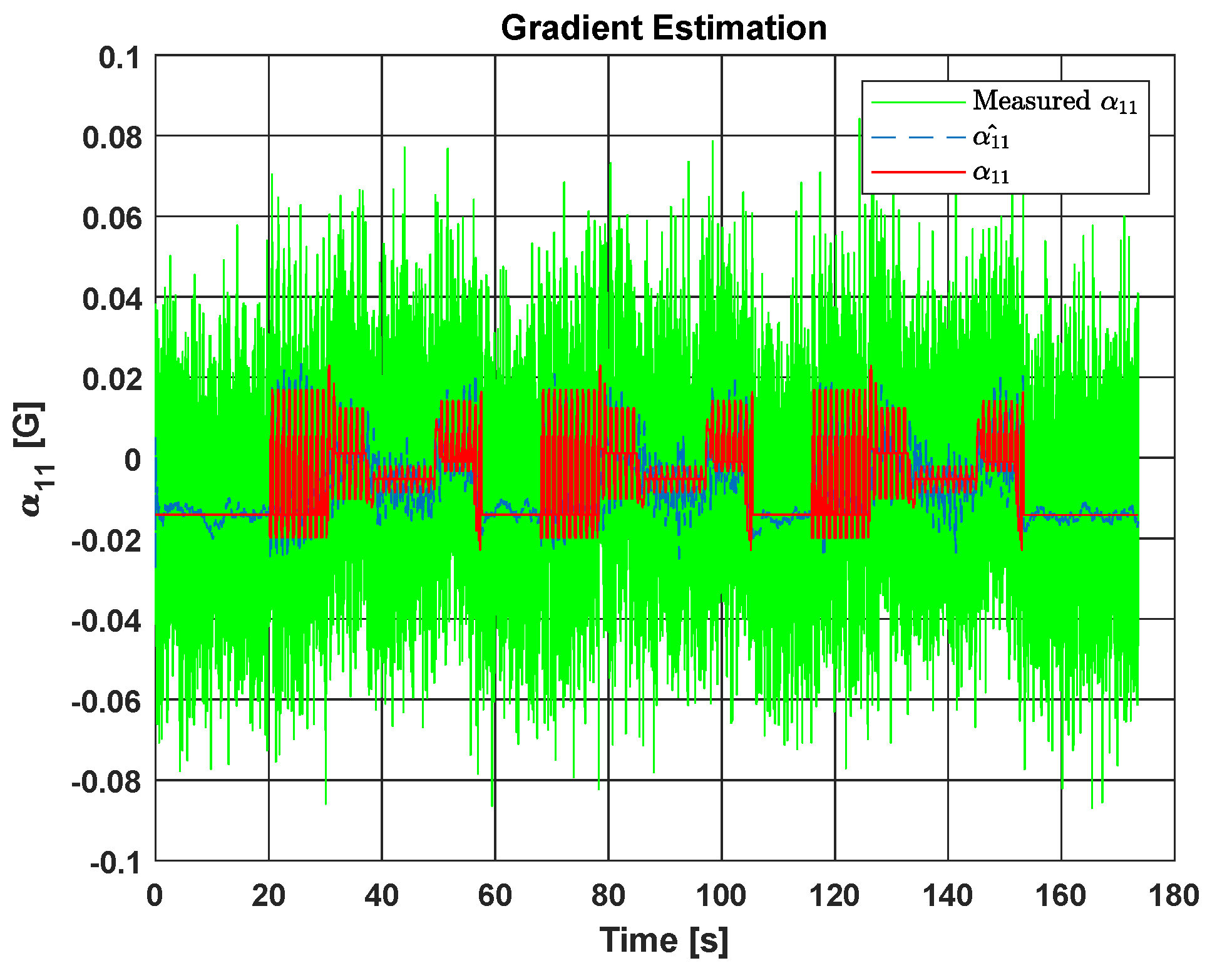
5.2.2. Magnetic Field Gradient-Based EKF Results
5.2.3. Application: Extending to Position Estimation
5.2.4. Zero-Velocity Update Results
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Draghici, I.; Vasilateanu, A.; Goga, N.; Pavaloiu, B.; Guta, L.; Mihailescu, M.N.; Boiangiu, C. Indoor positioning system for location based healthcare using trilateration with corrections. In Proceedings of the International Conference on Engineering, Technology and Innovation (ICE/ITMC), Funchal, Portugal, 27–29 June 2017; pp. 169–172. [Google Scholar]
- Van Haute, T.; De Poorter, E.; Crombez, P.; Lemic, F.; Handziski, V.; Wirstrom, N.; Wolisz, A.; Voigt, T.; Moerman, I. Performance analysis of multiple Indoor Positioning Systems in a healthcare environment. Int. J. Health Geogr. 2016, 15, 7. [Google Scholar] [CrossRef] [PubMed]
- Ridolfi, M.; Vandermeeren, S.; Defraye, J.; Steendam, H.; Gerlo, J.; Clercq, D.; Hoebeke, J.; De Poorter, E. Experimental Evaluation of UWB Indoor Positioning for Sport Postures. Sensors 2018, 18, 168. [Google Scholar] [CrossRef] [PubMed]
- Rantakokko, J.; Rydell, J.; Strömbäck, P.; Händel, P.; Callmer, J.; Tornqvist, D.; Gustafsson, F.; Jobs, M.; Grudén, M. Accurate and reliable soldier and first responder indoor positioning: Multisensor systems and cooperative localization. IEEE Wirel. Commun. 2011, 18, 10–18. [Google Scholar] [CrossRef]
- Duan, Y.; Lam, K.; Lee, V.C.S.; Nie, W.; Liu, K.; Li, H.; Xue, C.J. Data Rate Fingerprinting: A WLAN-Based Indoor Positioning Technique for Passive Localization. IEEE Sens. J. 2019, 19, 6517–6529. [Google Scholar] [CrossRef]
- Xu, H.; Wu, M.; Li, P.; Zhu, F.; Wang, R. An RFID Indoor Positioning Algorithm Based on Support Vector Regression. Sensors 2018, 18, 1504. [Google Scholar] [CrossRef]
- Martín-Gorostiza, E.; García-Garrido, M.-A.; Pizarro, D.; Salido-Monzú, D.; Torres, P. An Indoor Positioning Approach Based on Fusion of Cameras and Infrared Sensors. Sensors 2019, 19, 2519. [Google Scholar]
- Michel, T.; Genevès, P.; Fourati, H.; Layaïda, N. Attitude estimation for indoor navigation and augmented reality with smartphones. Pervasive Mob. Comput. 2018, 46, 96–121. [Google Scholar] [CrossRef]
- Fourati, H. Heterogeneous data fusion algorithm for pedestrian navigation via foot-mounted inertial measurement unit and complementary filter. IEEE Trans. Instrum. Meas. 2015, 64, 221–229. [Google Scholar] [CrossRef]
- Skog, I.; Nilsson, J.O.; Händel, P. Evaluation of zero-velocity detectors for foot-mounted inertial navigation systems. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–6. [Google Scholar]
- Fourati, H.; Manamanni, N.; Afilal, L.; Handrich, Y. A Nonlinear Filtering Approach for the Attitude and Dynamic Body Acceleration Estimation Based on Inertial and Magnetic Sensors: Bio-Logging Application. IEEE Sens. J. 2011, 11, 233–244. [Google Scholar] [CrossRef]
- Gabaldon, J.; Turner, E.; Johnson-Roberson, M.; Barton, K.; Johnson, M.; Anderson, E.; Shorter, K. Integration, Calibration, and Experimental Verification of a Speed Sensor for Swimming Animals. IEEE Sens. J. 2019, 19, 3616–3625. [Google Scholar] [CrossRef]
- Erdelić, M.; Carić, T.; Ivanjko, E.; Jelušić, N. Classification of Travel Modes Using Streaming GNSS Data. Transp. Res. Procedia 2019, 40, 209–216. [Google Scholar] [CrossRef]
- Yang, X.; Stewart, K.; Tang, L.; Xie, Z.; Li, Q. A Review of GPS Trajectories Classification Based on Transportation Mode. Sensors 2018, 18, 3741. [Google Scholar] [CrossRef] [PubMed]
- Bachmann, E.R.; Yun, X.; Peterson, C.W. An investigation of the effects of magnetic variations on inertial/magnetic orientation sensors. In Proceedings of the International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 1115–1122. [Google Scholar]
- Fan, B.; Li, Q.; Wang, C.; Liu, T. An Adaptive Orientation Estimation Method for Magnetic and Inertial Sensors in the Presence of Magnetic Disturbances. Sensors 2017, 17, 1161. [Google Scholar] [CrossRef] [PubMed]
- Jackson, J. Classical Electrodynamics, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1998. [Google Scholar]
- Lu, C.; Uchiyama, H.; Thomas, D.; Shimada, A.; Taniguchi, R.I. Indoor Positioning System Based on Chest-Mounted IMU. Sensors 2019, 19, 420. [Google Scholar] [CrossRef] [PubMed]
- Wu, F.; Liang, Y.; Fu, Y.; Ji, X. A robust indoor positioning system based on encoded magnetic field and low-cost IMU. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 204–212. [Google Scholar]
- Vissière, D.; Martin, A.; Petit, N. Using spatially distributed magnetometers to increase IMU-based velocity estimation in perturbed areas. In Proceedings of the Conference on Decision and Control, New Orleans, LA, USA, 29 June–2 July 2007; pp. 4924–4931. [Google Scholar]
- Vissière, D.; Martin, A.; Petit, N. Using magnetic disturbances to improve IMU-based position estimation. In Proceedings of the European Control Conference, Kos, Greece, 2—5 July 2007; pp. 2853–2858. [Google Scholar]
- Praly, N.; Bristeau, P.J.; Laurent-Varin, J.; Petit, N. Using distributed magnetometry in navigation of heavy launchers and space vehicles. In Progress in Flight Dynamics, Guidance, Navigation, Control, Fault Detection, and Avionics; EDP Sciences: Les Ulis, France, 2013; Volume 6, pp. 45–54. [Google Scholar]
- Batista, P.; Petit, N.; Silvestre, C.; Oliveira, P. Further results on the observability in magneto-inertial navigation. In Proceedings of the American Control Conference, ACC, Washington, DC, USA, 17–19 June 2013; pp. 2503–2508. [Google Scholar]
- Caruso, D.; Sanfourche, M.; Le Besnerais, G.; Vissière, D. Infrastructureless indoor navigation with an hybrid magneto-inertial and depth sensor system. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 18–21 September 2016; pp. 1–8. [Google Scholar]
- Skog, I. Inertial and Magnetic-Field Sensor Arrays—Capabilities and Challenges. In Proceedings of the IEEE Sensors, New Delhi, India, 28–31 October 2018; pp. 1–4. [Google Scholar]
- Skog, I.; Hendeby, G.; Gustafsson, F. Magnetic Odometry—A Model-Based Approach Using a Sensor Array. In Proceedings of the International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 794–798. [Google Scholar]
- Chesneau, C.I.; Hillion, M.; Prieur, C. Motion estimation of a rigid body with an EKF using magneto-inertial measurements. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Madrid, Spain, 18–21 September 2016; pp. 1–6. [Google Scholar]
- Chesneau, C.I.; Hillion, M.; Hullo, J.F.; Thibault, G.; Prieur, C. Improving magneto-inertial attitude and position estimation by means of a magnetic heading observer. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Dorveaux, E.; Boudot, T.; Hillion, M.; Petit, N. Combining inertial measurements and distributed magnetometry for motion estimation. In Proceedings of the American Control Conference (ACC), San Francisco, CA, USA, 29 June–1 July 2011; pp. 4249–4256. [Google Scholar]
- Dorveaux, E.; Petit, N. Presentation of a magneto-inertial positioning system: Navigating through magnetic disturbances. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimarães, Portugal, 21–23 September 2011. [Google Scholar]
- Zampella, F.J.; Jiménez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J.I. Simulation of Foot-Mounted IMU Signals for the Evaluation of PDR Algorithms. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–6. [Google Scholar]
- Kuipers, J. Quaternions and Rotation Sequences; Princeton University Press: Princeton, NJ, USA, 1999. [Google Scholar]
- Chesneau, C.I. Magneto-Inertial Dead Reckoning in inhomogeneous field and indoor applications. Ph.D. Thesis, Université Grenoble Alpes (ComUE), Saint-Martin-d’Heres, France, 2018. [Google Scholar]
- Zmitri, M.; Fourati, H.; Prieur, C. Improving Inertial Velocity Estimation Through Magnetic Field Gradient-based Extended Kalman Filter. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 Sepember–3 October 2019. [Google Scholar]
- Madgwick, S.O.; Harrison, A.J.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar]
- Süli, E. Numerical Solution of Ordinary Differential Equations; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2010. [Google Scholar]
- Choukroun, D.; Bar-Itzhack, I.Y.; Oshman, Y. A Novel Quaternion Kalman Filter. IEEE Trans. Aerosp. Electron. Syst. 2006, 24, 174–190. [Google Scholar] [CrossRef]
- Renaudin, V.; Combettes, C. Magnetic, acceleration fields and gyroscope quaternion (MAGYQ)-based attitude estimation with smartphone sensors for indoor pedestrian navigation. IEEE Trans. Aerosp. Electron. Syst. 2014, 14, 22864–22890. [Google Scholar] [CrossRef]
- Mahony, R.; Hamel, T.; Pflimlin, J.M. Nonlinear complementary filters on the special orthogonal group. IEEE Trans. Autom. Control 2008, 53, 1203–1218. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, Z.; Fourati, H.; Li, R.; Liu, M. Generalized Linear Quaternion Complementary Filter for Attitude Estimation from Multi-Sensor Observations: An Optimization Approach. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1330–1343. [Google Scholar] [CrossRef]
- Martin, P.; Salaun, E. Design and implementation of a low-cost observer-based attitude and heading reference system. Control. Eng. Pract. 2010, 18, 712–722. [Google Scholar] [CrossRef]
- Ming, M.; Song, Q.; Gu, Y.; Li, Y.; Zhou, Z. An Adaptive Zero Velocity Detection Algorithm Based on Multi-Sensor Fusion for a Pedestrian Navigation System. Sensors 2018, 18, 3261. [Google Scholar]
- Skog, I.; Händel, P.; Nilsson, J.O.; Rantakokko, J. Zero-Velocity Detection—An Algorithm Evaluation. IEEE Trans. Biomed. Eng. 2010, 57, 2657–2666. [Google Scholar] [CrossRef] [PubMed]
- Xsens MTi Products. Available online: https://www.xsens.com/mti-products (accessed on 21 July 2020).
- Oppenheim, A.V.; Verghese, G.C. Signals, Systems and Inference; Pearson: London, UK, 2015. [Google Scholar]
- Diaz, E.M.; de Ponte Müller, F.; Jiménez, A.R.; Zampella, F. Evaluation of AHRS algorithms for inertial personal localization in industrial environments. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 3412–3417. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noise Standard Deviation | |
|---|---|
| Accelerometer | 0.012 |
| Gyroscope | 0.0087 |
| Magnetometers | 0.03 |
| Without filtering [27] | 0.37 |
| With filtering in a primary EKF [34] | 0.29 |
| With filtering | 0.27 |
| Without filtering [27] | 31.60 | 36.77 |
| With filtering in a primary EKF [34] | 25.18 | 21.60 |
| With filtering | 20.88 | 19.50 |
| Without filtering + ZUPT | 0.26 | 1.22 |
| Filtering in a primary EKF+ZUPT | 0.14 | 0.88 |
| With filtering + ZUPT | 0.11 | 0.41 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zmitri, M.; Fourati, H.; Prieur, C. Magnetic Field Gradient-Based EKF for Velocity Estimation in Indoor Navigation. Sensors 2020, 20, 5726. https://doi.org/10.3390/s20205726
Zmitri M, Fourati H, Prieur C. Magnetic Field Gradient-Based EKF for Velocity Estimation in Indoor Navigation. Sensors. 2020; 20(20):5726. https://doi.org/10.3390/s20205726
Chicago/Turabian StyleZmitri, Makia, Hassen Fourati, and Christophe Prieur. 2020. "Magnetic Field Gradient-Based EKF for Velocity Estimation in Indoor Navigation" Sensors 20, no. 20: 5726. https://doi.org/10.3390/s20205726
APA StyleZmitri, M., Fourati, H., & Prieur, C. (2020). Magnetic Field Gradient-Based EKF for Velocity Estimation in Indoor Navigation. Sensors, 20(20), 5726. https://doi.org/10.3390/s20205726