Terahertz Frequency-Scaled Differential Imaging for Sub-6 GHz Vehicular Antenna Signature Analysis

 , , , ,
, , , ,  ,
,  and
and
Abstract
1. Introduction
2. The Imaging Process
2.1. Formulation of the Total Image Reconstruction Process
2.2. Formulation of Differential Image Reconstruction Process
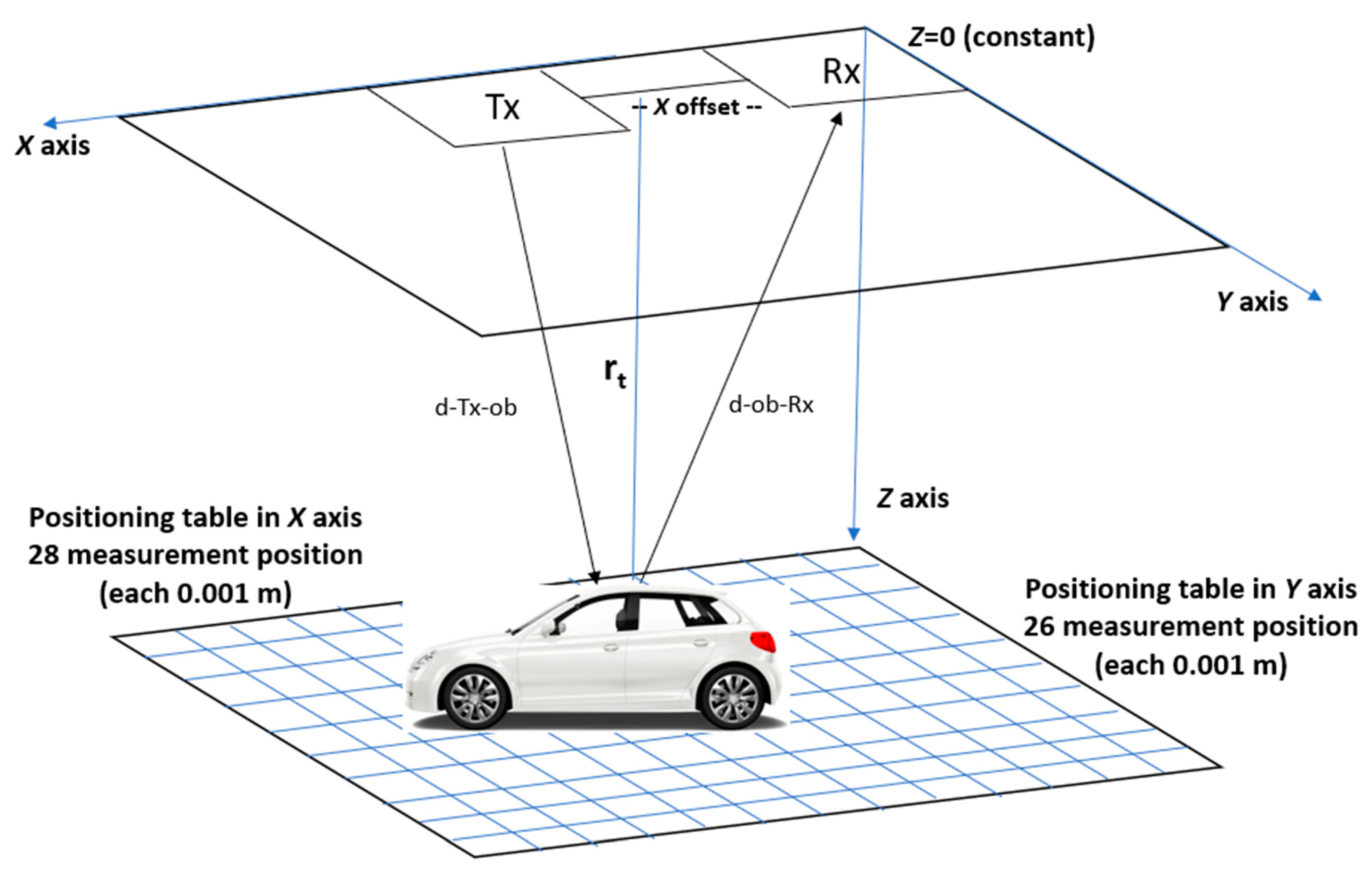
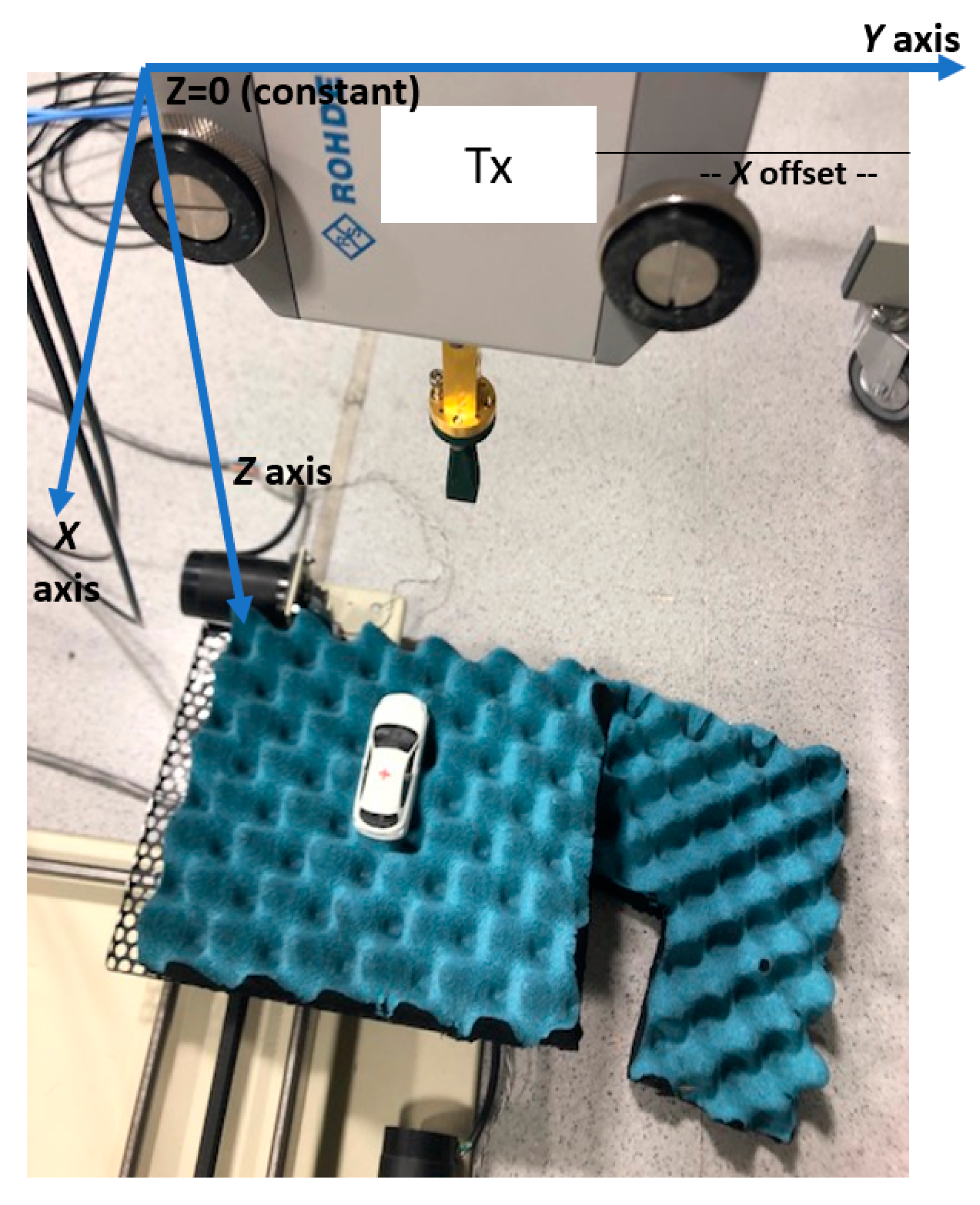
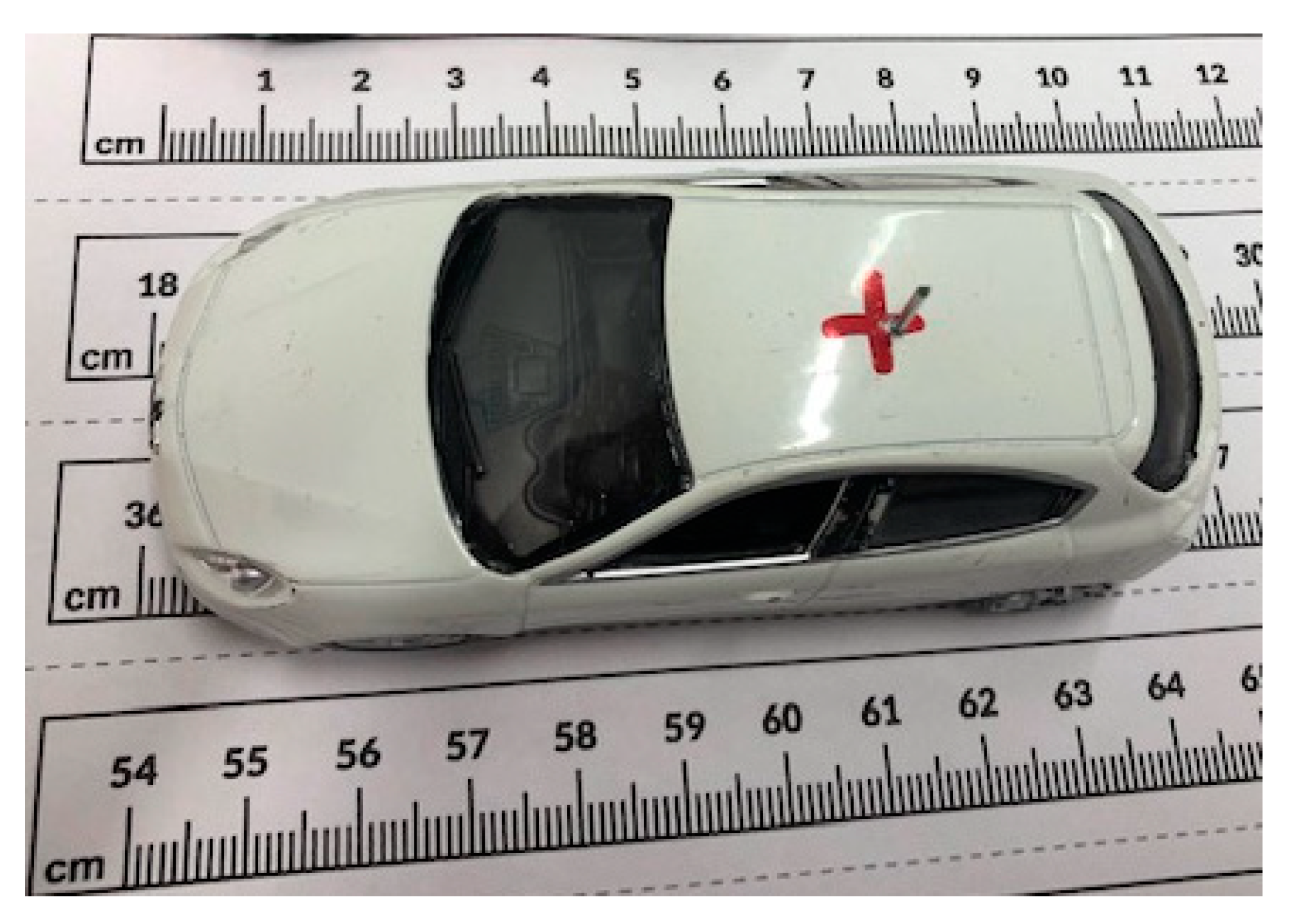
2.3. Measurement Description and Configuration
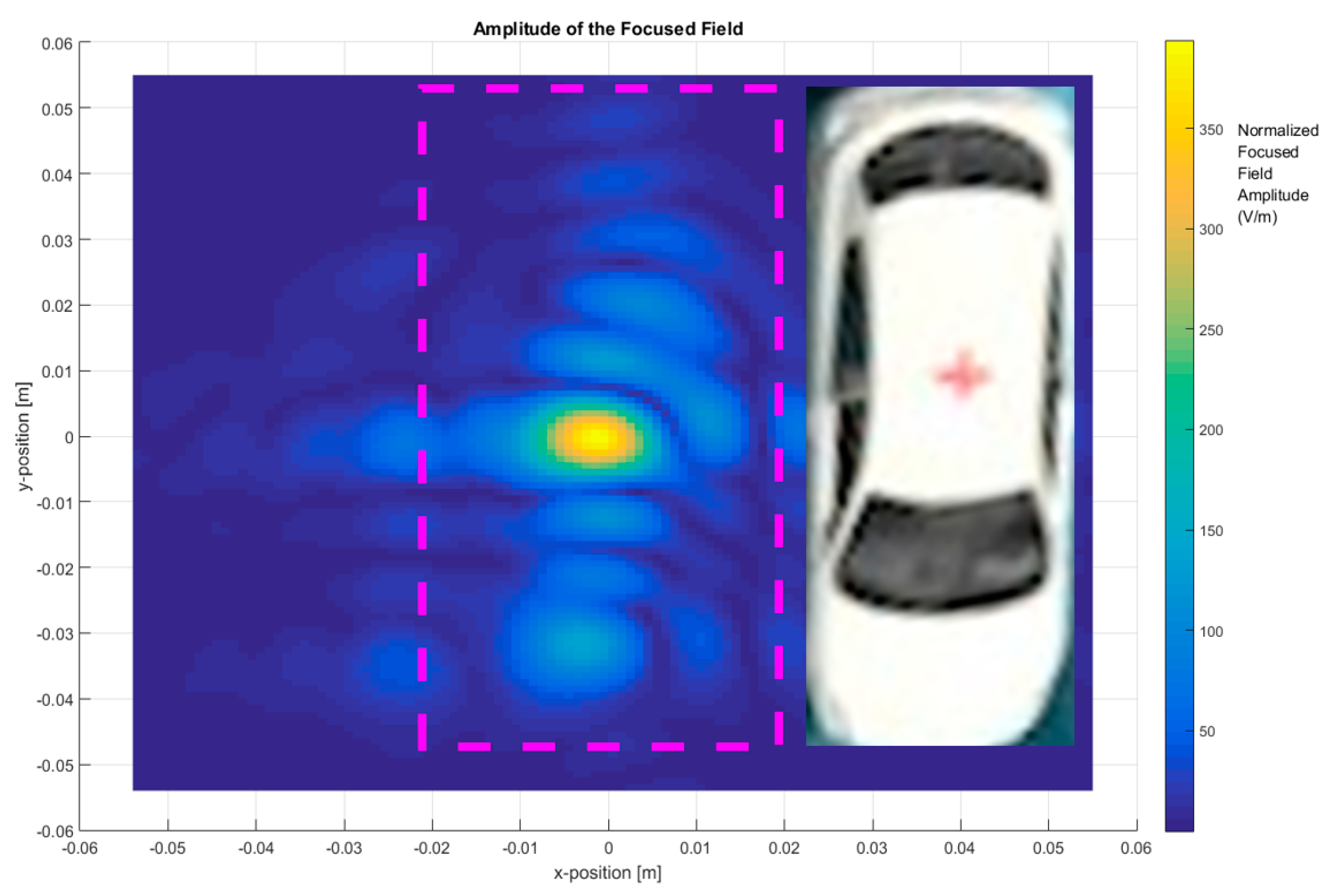
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chattopadhyay, X.G. Technology, capabilities, and performance of low power terahertz sources. IEEE Trans. Terahertz Sci. Technol. 2011, 1, 33–53. [Google Scholar] [CrossRef]
- Siegel, P. Terahertz technology. IEEE Trans. Microw. Theory Technol. 2002, 50, 910–928. [Google Scholar] [CrossRef]
- Solano-Perez, J.A.; Martínez-Inglés, M.-T.; Molina-Garcia-Pardo, J.-M.; Romeu, J.; Jofre, L.; Rodríguez, J.-V.; Mateo-Aroca, A. Linear and Circular UWB Millimeter-Wave and Terahertz Monostatic Near-Field Synthetic Aperture Imaging. Sensors 2020, 20, 1544. [Google Scholar] [CrossRef] [PubMed]
- Friederich, F.; May, K.H.; Baccouche, B.; Matheis, C.; Bauer, M.; Jonuscheit, J.; Moor, M.; Denman, D.; Bramble, J.; Savage, N. Terahertz Radome Inspection. Photonics 2018, 5, 1. [Google Scholar] [CrossRef]
- Hao, J.; Li, J.; Pi, Y. Three-Dimensional Imaging of Terahertz Circular SAR with Sparse Linear Array. Sensors 2018, 18, 2477. [Google Scholar] [CrossRef] [PubMed]
- Dobroiu, A.; Wakasugi, R.; Shirakawa, Y.; Suzuki, S.; Asada, M. Absolute and Precise Terahertz-Wave Radar Based on an Amplitude-Modulated Resonant-Tunneling-Diode Oscillator. Photonics 2018, 5, 52. [Google Scholar] [CrossRef]
- Fromenteze, T.; Decroze, C.; Abid, S.; Yurduseven, O. Sparsity-Driven Reconstruction Technique for Microwave/Millimeter-Wave Computational Imaging. Sensors 2018, 18, 1536. [Google Scholar] [CrossRef] [PubMed]
- King, D.D. Measurement and interpretation of antenna scattering. IEEE Proc. IRE 1949, 37, 770–777. [Google Scholar] [CrossRef]
- Lin, D.B.; Chu, T.H. Bistatic frequency-swept microwave imaging: Principle, methodology, and experimental results. IEEE Trans. Microw. Theory Technol. 1993, 41, 855–861. [Google Scholar] [CrossRef]
- Jofre, L.; Broquetas, A.; Romeu, J. UWB Tomographic Radar Imaging of Penetrable and Impenetrable Objects. Proc. IEEE 2009, 97, 451–464. [Google Scholar] [CrossRef]
- Alvarez, Y.; Rodriguez-Vaqueiro, Y.; Gonzalez-Valdes, B.; Mantzavinos, S.; Rappaport, C.M.; Las-Heras, F.; Martínez-Lorenzo, J.Á. Fourier-based Imaging for Multi-static Radar System. IEEE Trans. Microw. Theory Technol. 2014, 62, 1798–1810. [Google Scholar] [CrossRef]
- Kim, Y.J.; Jofre, L.; de Flaviis, F.; Feng, M.Q. Microwave Reflection Tomographic Array for Damage Detection of Civi Structures. IEEE Trans. Antennas Propag. 2003, 51, 3022–3032. [Google Scholar]
- Broquetas, A.; Palau, J.; Jofre, L.; Cardama, A. Spherical Wave Near-Field Imaging and Radar Cross-Section Measurement. IEEE Trans. Antennas Propag. 1998, 46, 730–735. [Google Scholar] [CrossRef]
- Bouazza, B. Millimeter-Wave MIMO Close Range Imaging. Master’s Thesis, Universitat Politecnica de Catalunya, Barcelona Spain, July 2020. [Google Scholar]
- Capdevila, S.; Jofre, L.; Romeu, J.; Bolomey, J.C. Multi-Loaded Modulated Scatter Technique for Sensing Applications. IEEE Trans. Instrum. Meas. 2013, 62, 794–805. [Google Scholar] [CrossRef]
- Arrick Robotics—Stepper Motor, Positioning, Automation, Mobile Robots, Resources. Available online: http://www.arrickrobotics.com/ (accessed on 1 December 2019).
- Rohde & Schwarz GmbH & Co. KG. Available online: https://www.rohde-schwarz.com (accessed on 10 June 2020).
- Homepage Flann—Flann Microwave. Available online: http://flann.com/ (accessed on 10 June 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Start frequency | 220 GHz |
| End frequency | 330 GHz |
| Sampling points | 8192 |
| Intermediate frequency (IF) bandwidth | 1 kHz |
| Emitting power | 0 dBm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Solano-Perez, J.A.; Martínez-Inglés, M.-T.; Molina-Garcia-Pardo, J.-M.; Romeu, J.; Jofre-Roca, L.; Ballesteros-Sánchez, C.; Rodríguez, J.-V.; Mateo-Aroca, A. Terahertz Frequency-Scaled Differential Imaging for Sub-6 GHz Vehicular Antenna Signature Analysis. Sensors 2020, 20, 5636. https://doi.org/10.3390/s20195636
Solano-Perez JA, Martínez-Inglés M-T, Molina-Garcia-Pardo J-M, Romeu J, Jofre-Roca L, Ballesteros-Sánchez C, Rodríguez J-V, Mateo-Aroca A. Terahertz Frequency-Scaled Differential Imaging for Sub-6 GHz Vehicular Antenna Signature Analysis. Sensors. 2020; 20(19):5636. https://doi.org/10.3390/s20195636
Chicago/Turabian StyleSolano-Perez, Jose Antonio, María-Teresa Martínez-Inglés, Jose-Maria Molina-Garcia-Pardo, Jordi Romeu, Lluis Jofre-Roca, Christian Ballesteros-Sánchez, José-Víctor Rodríguez, and Antonio Mateo-Aroca. 2020. "Terahertz Frequency-Scaled Differential Imaging for Sub-6 GHz Vehicular Antenna Signature Analysis" Sensors 20, no. 19: 5636. https://doi.org/10.3390/s20195636
APA StyleSolano-Perez, J. A., Martínez-Inglés, M.-T., Molina-Garcia-Pardo, J.-M., Romeu, J., Jofre-Roca, L., Ballesteros-Sánchez, C., Rodríguez, J.-V., & Mateo-Aroca, A. (2020). Terahertz Frequency-Scaled Differential Imaging for Sub-6 GHz Vehicular Antenna Signature Analysis. Sensors, 20(19), 5636. https://doi.org/10.3390/s20195636