Fundamental Concepts and Evolution of Wi-Fi User Localization: An Overview Based on Different Case Studies


Abstract
1. Introduction
2. Basics and Challenges in Wi-Fi Localization
2.1. Principle of Operation of a Wi-Fi Network
2.2. Challenges for Localization
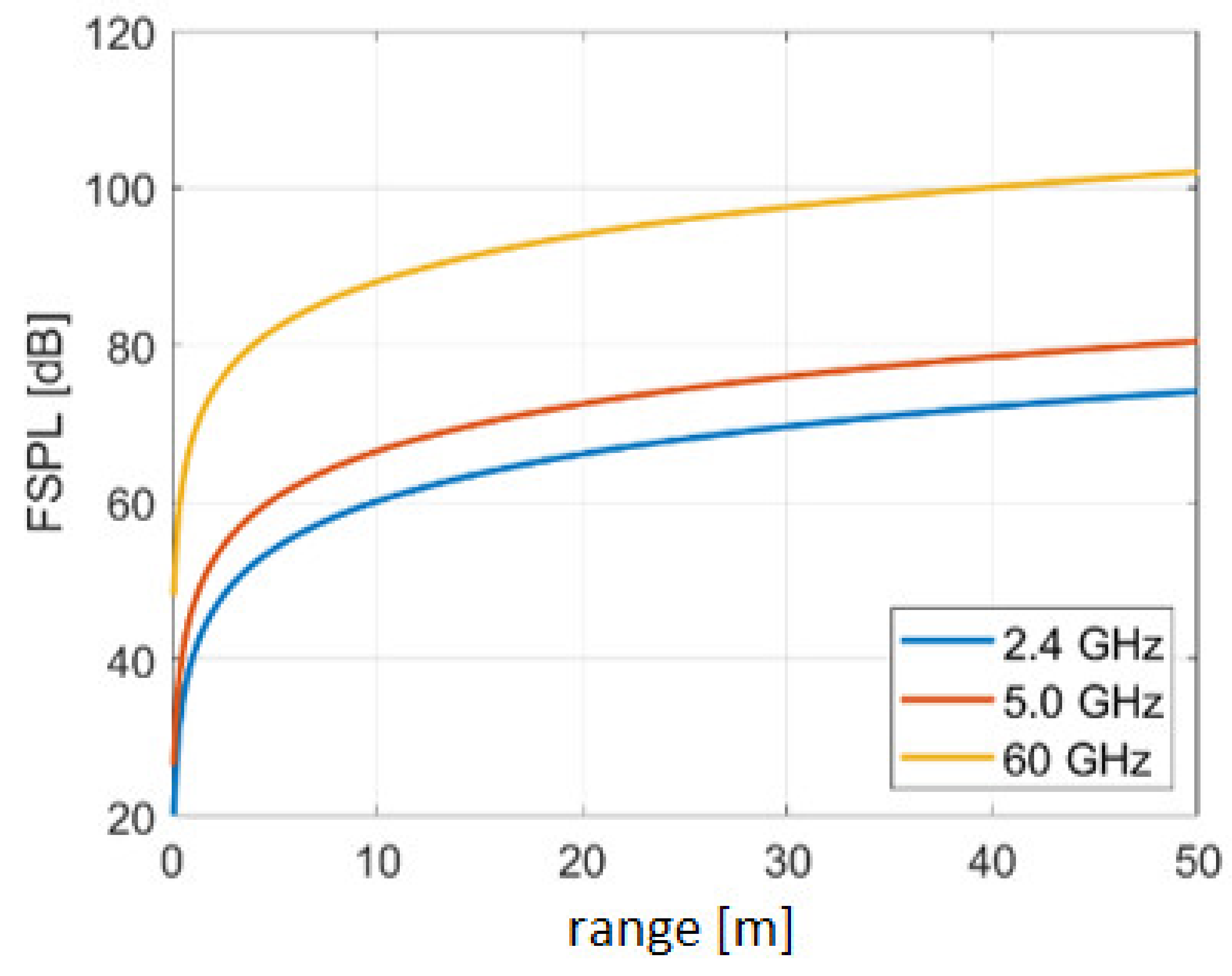
2.2.1. Signal Damping
- Absorption: change of the energy in another form (e.g., in warmth);
- Diffraction: change of the propagation direction of the waves by an edge or a narrow gap;
- Refraction: change of the propagation direction;
- Reflection: tossing of the wave mainly from smooth surfaces; and
- Dispersion: tossing of the wave in different directions and strengths mainly from rough surfaces.
2.2.2. Signal Interference
2.2.3. Signal Fluctuations and Noise
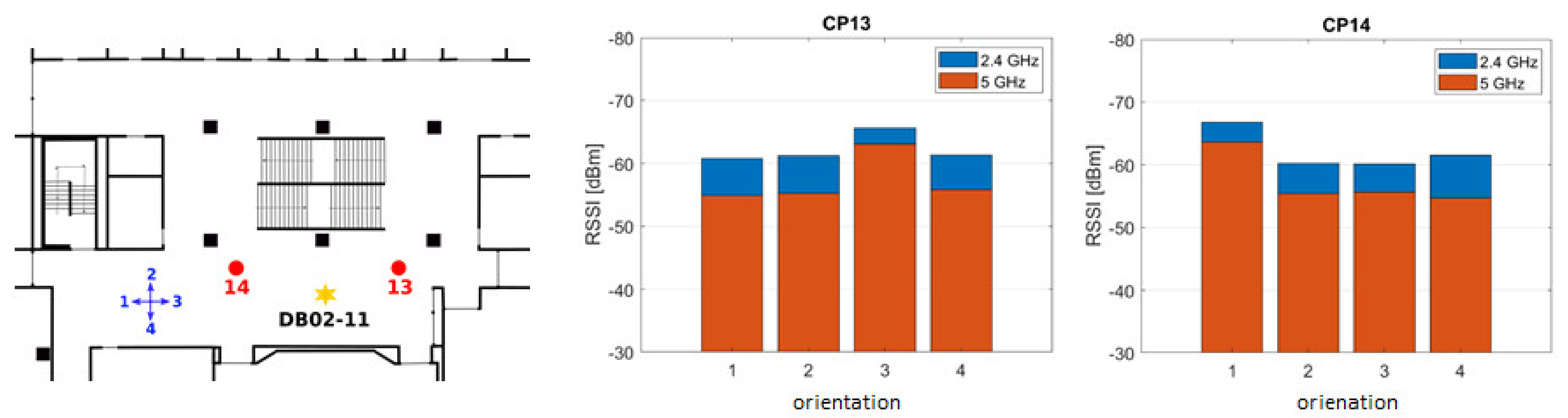
2.2.4. Influence of the Human Body on RSS
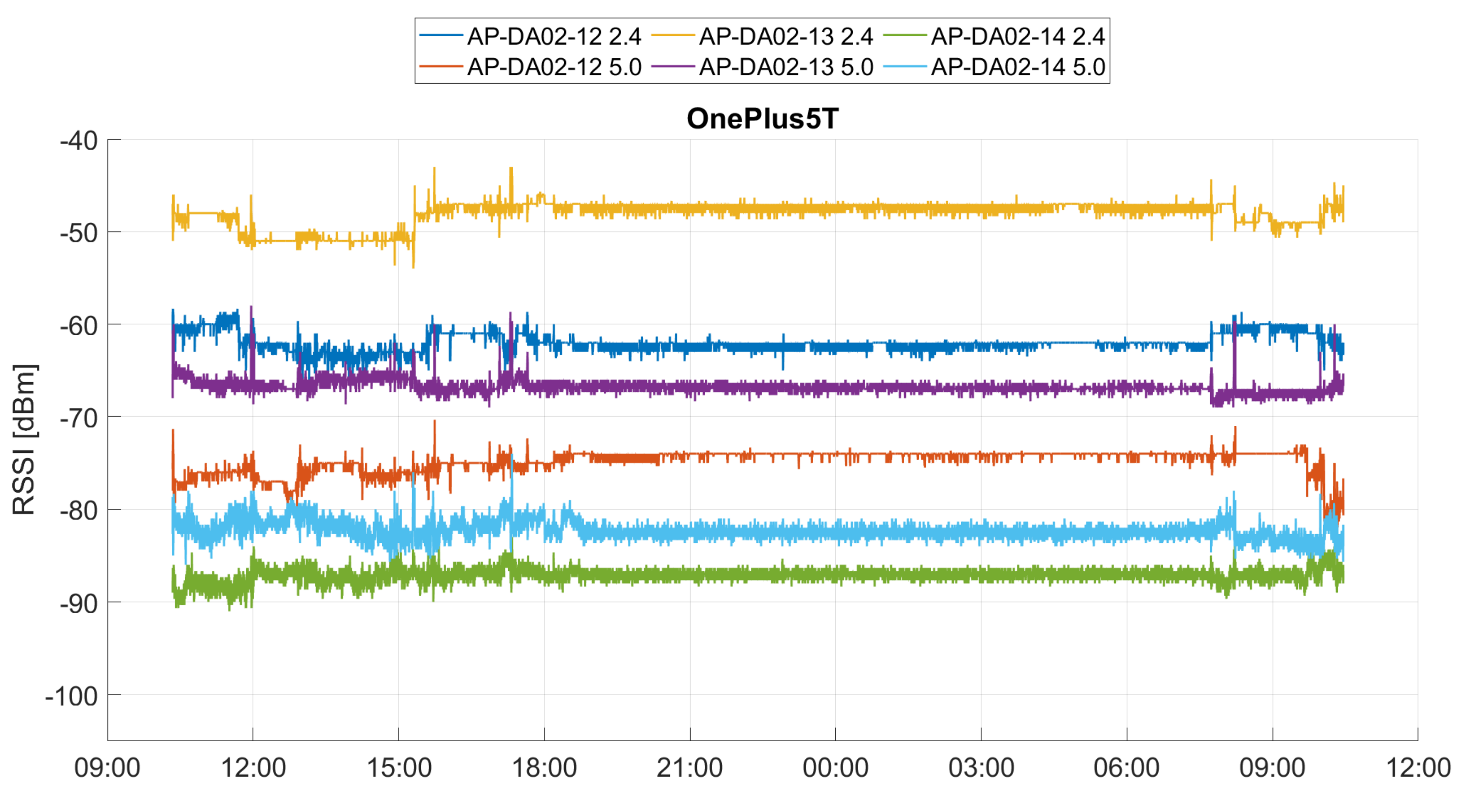
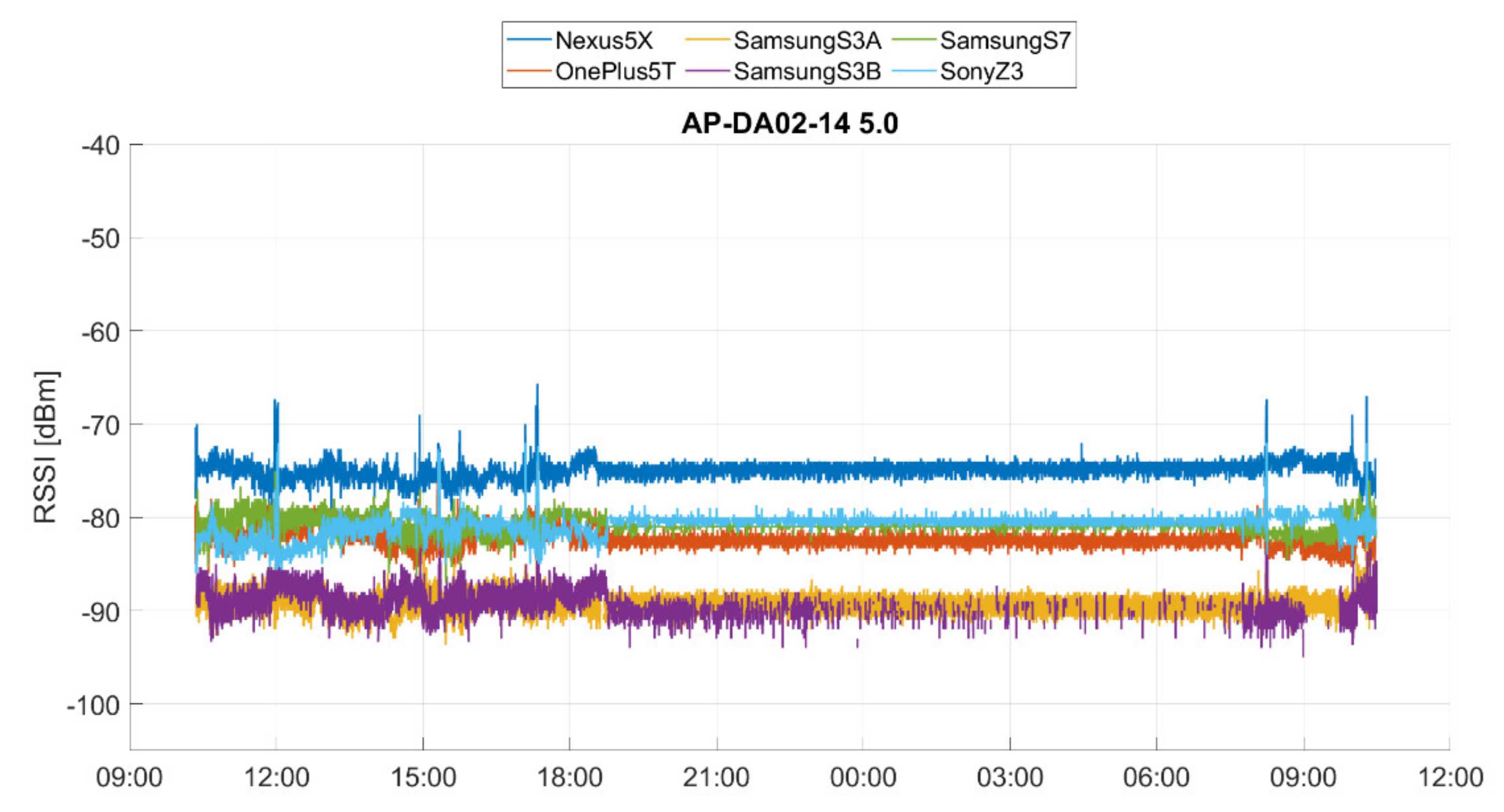
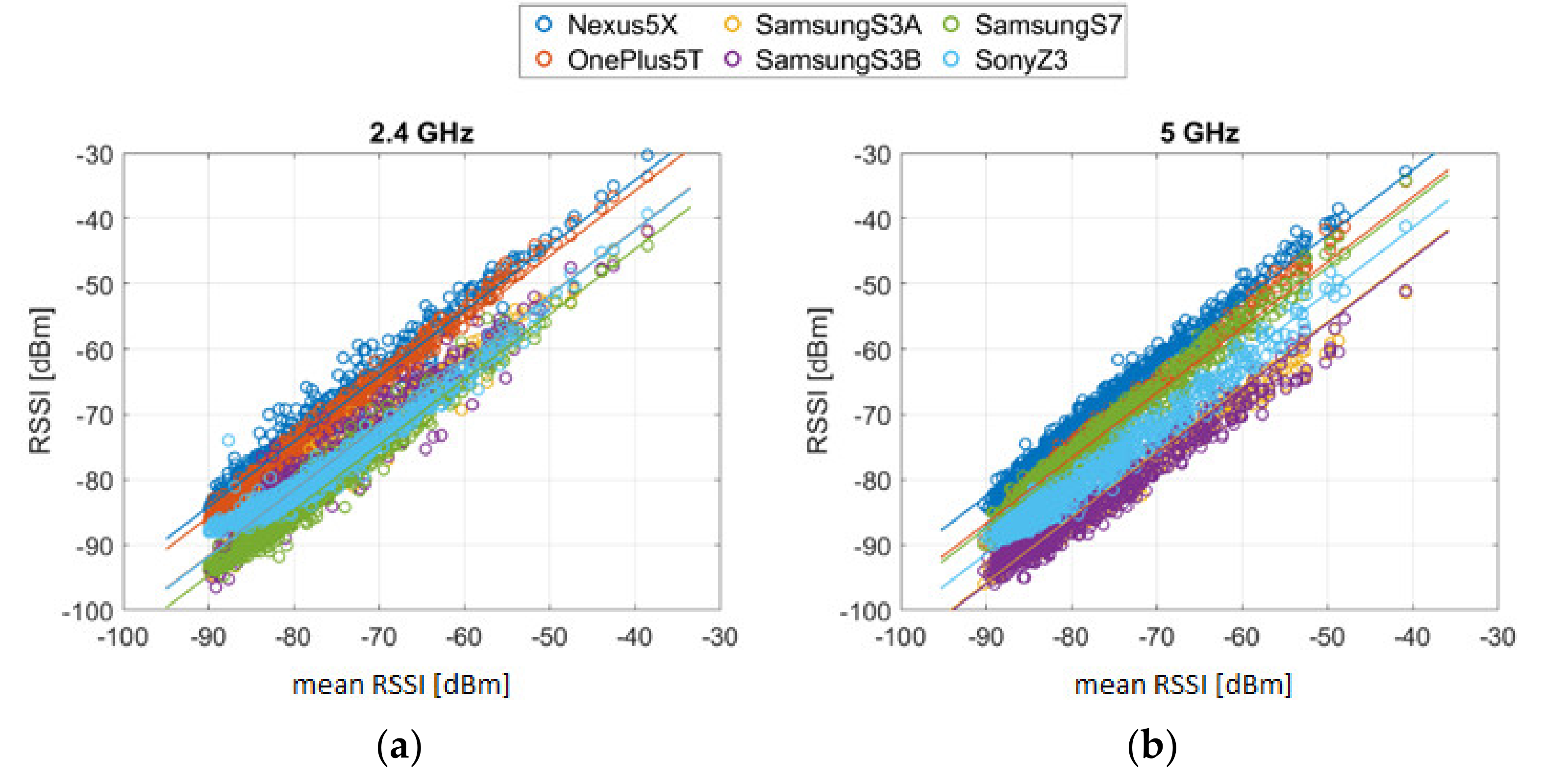
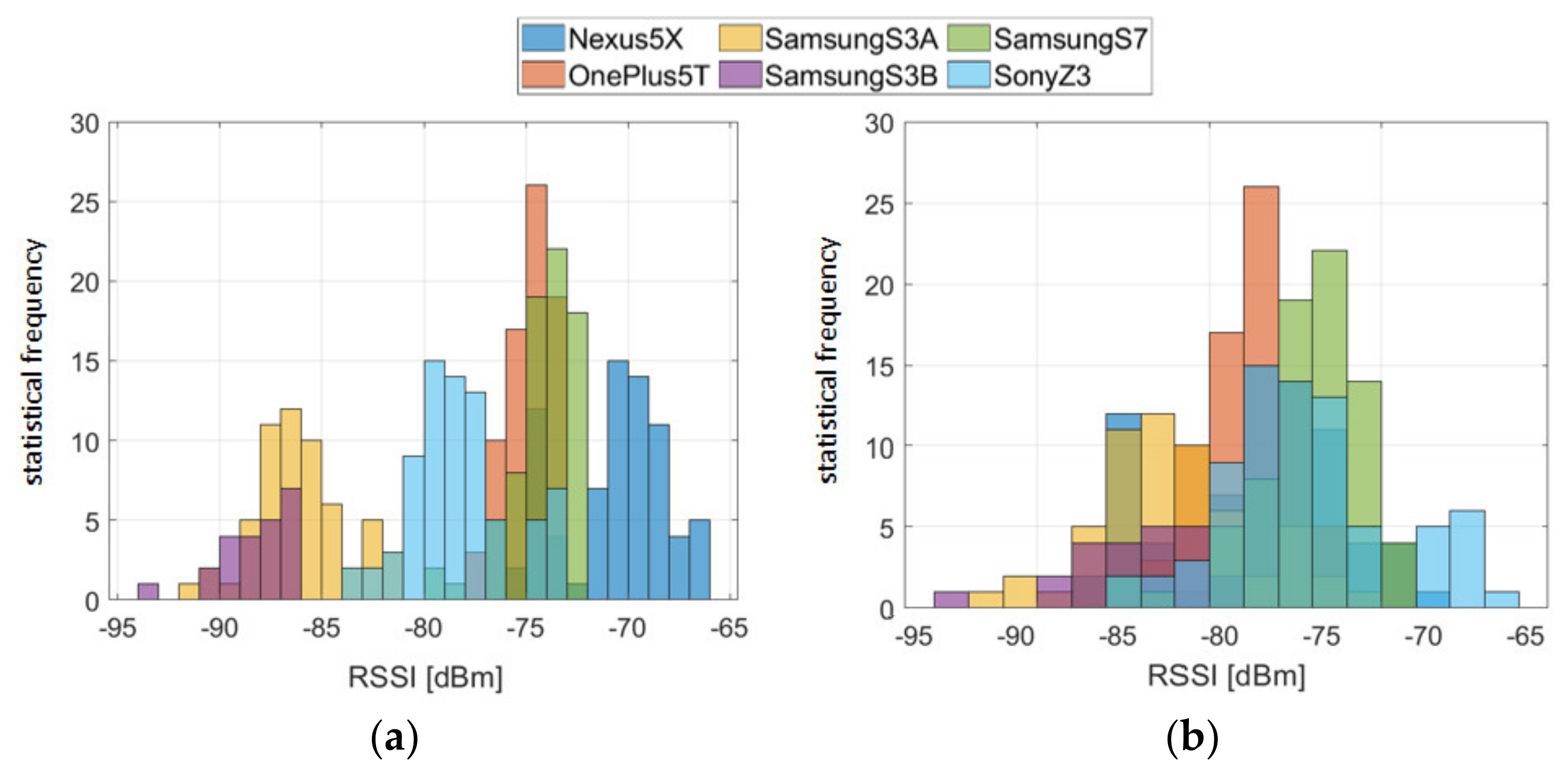
2.2.5. Device Dependence Due to Their Heterogeneity
2.2.6. Dependence on Duration of a Wi-Fi RSS Scan
2.2.7. Other Challenges
- Different types of APs may exist, such as multiple SSIDs where several networks at one physical AP are provided;
- Different hardware increases the difficulty of positioning algorithms, as they may receive different RSS readings from the same AP, even at the same position and time;
- Some APs might be temporarily unavailable due to various reasons; some may be replaced by new ones; and
- APs come and go; as time passes by, some APs disappear and new APs may emerge.
3. Common Mathematical Models
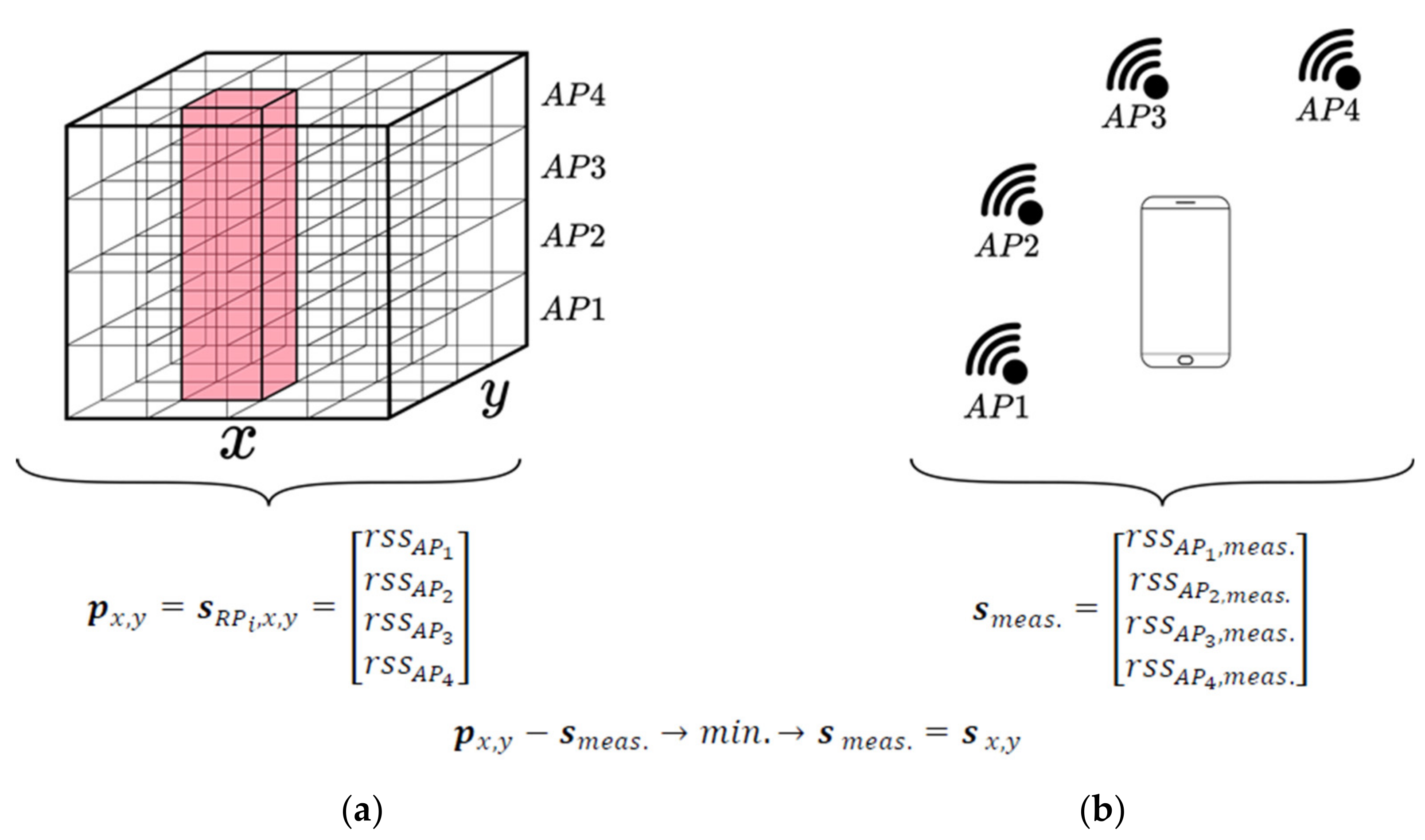
3.1. Location Fingerprinting
3.1.1. Training Phase
3.1.2. Positioning Phase
3.1.3. Deterministic Fingerprinting Approaches
3.1.4. Probabilistic Fingerprinting Algorithms
- The observation is a vector of length m at each test point where and ;
- m is a visible AP; in the case of a non-visible AP RSS = 0 dB is assigned;
- Equation (27) yields the emission probability for a given observation:with .
3.2. Lateration
3.2.1. RSS-Based Lateration
3.2.2. RTT-Based Lateration
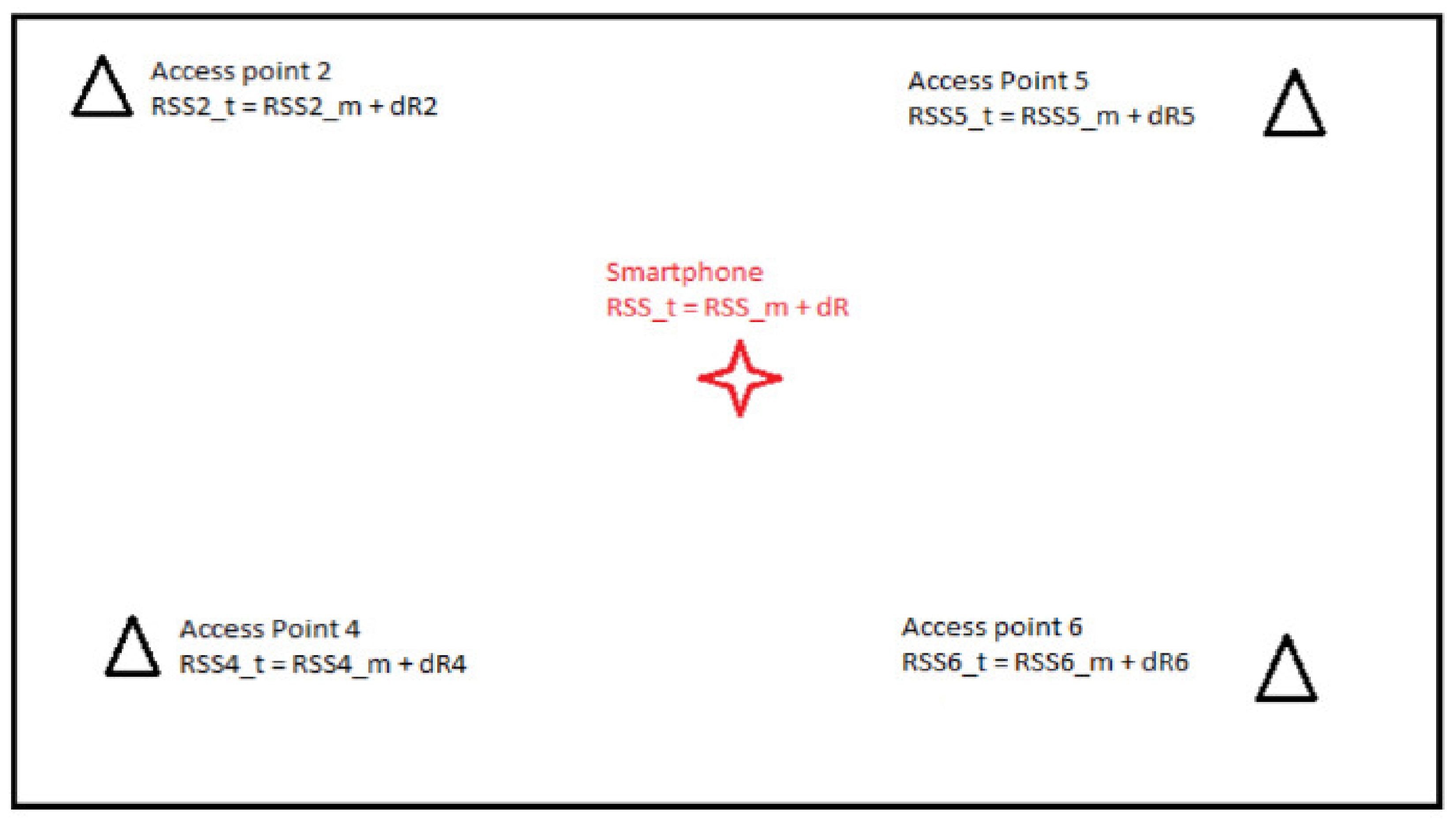
3.2.3. Differential Wi-Fi (DWi-Fi)
3.3. Discussion and Assessment of the Selected Approaches
4. Kinematic Positioning Case Studies
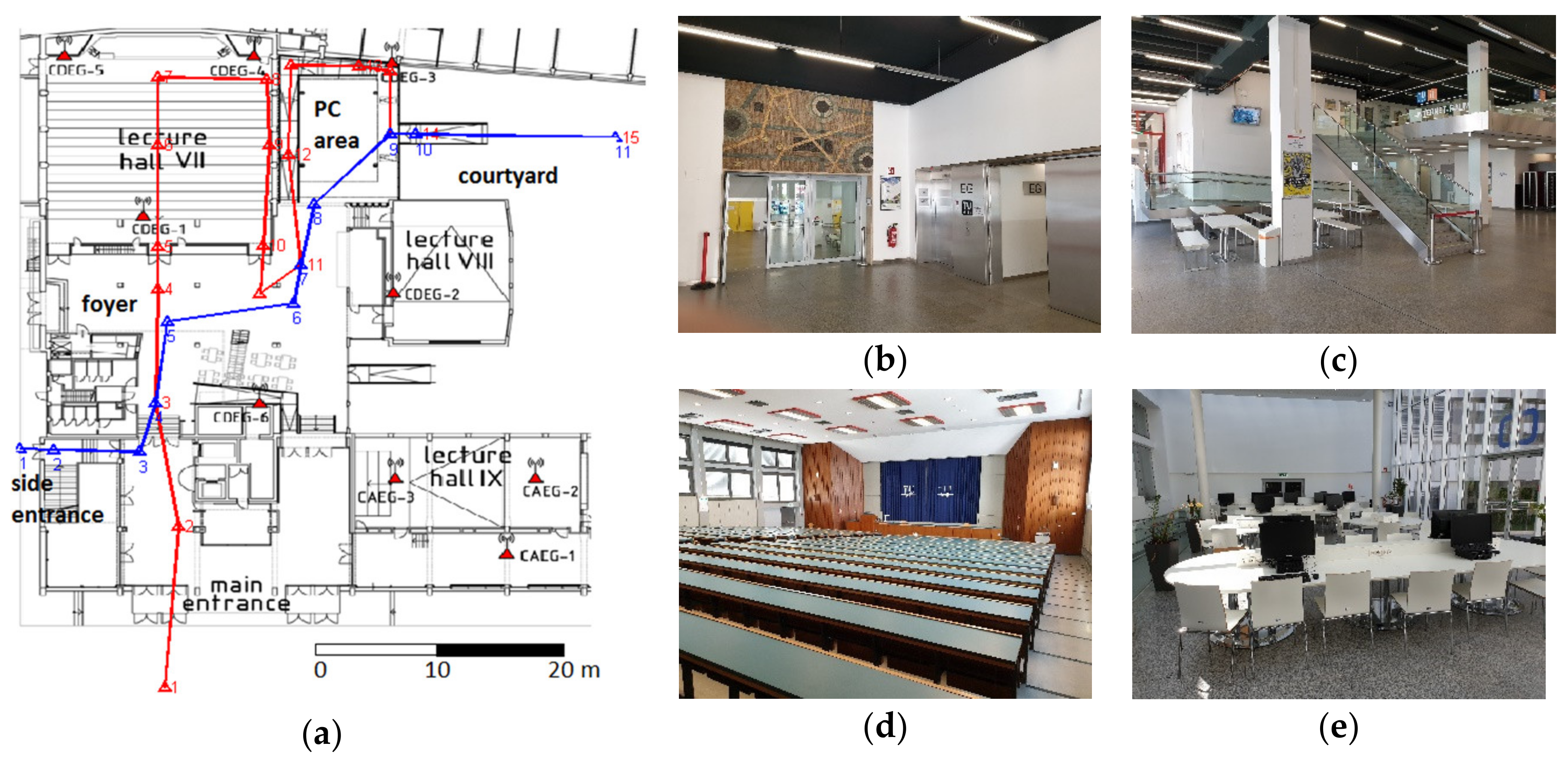
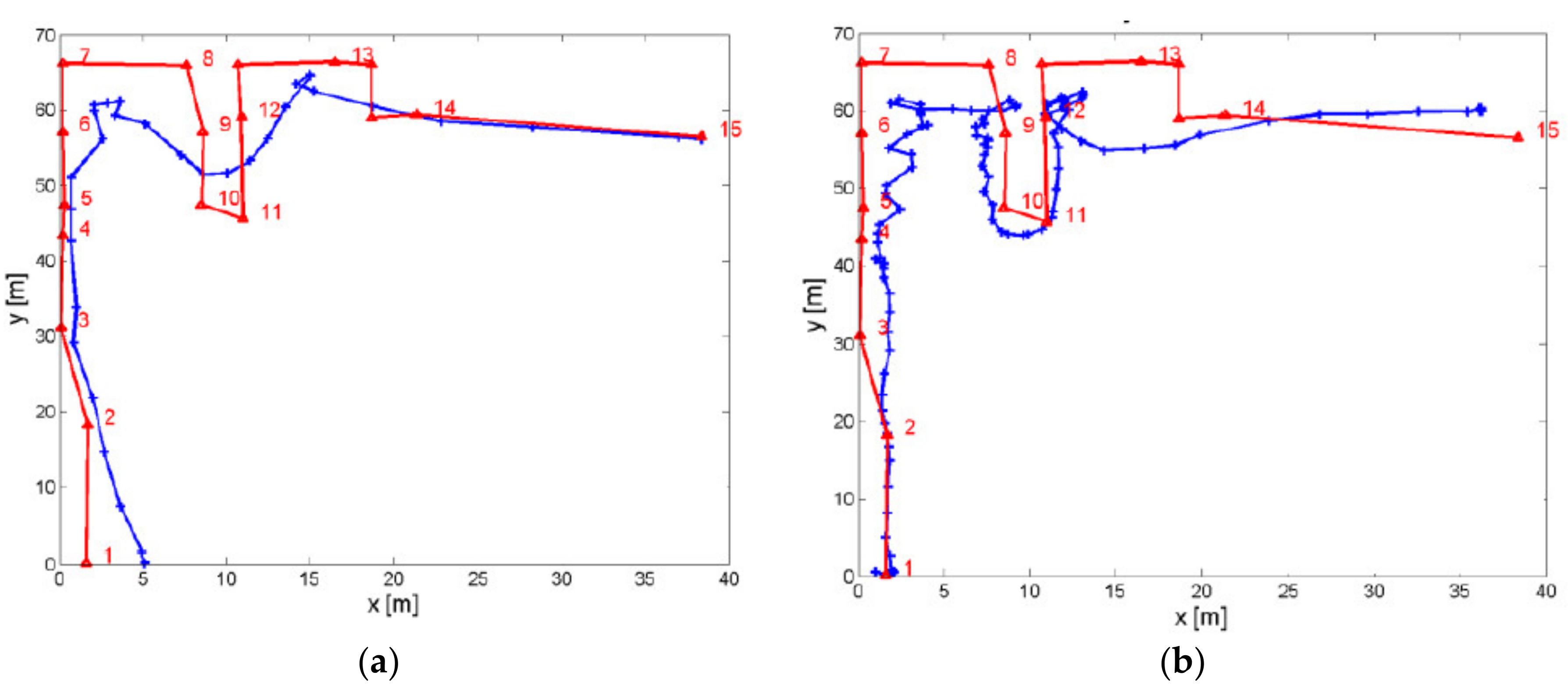
4.1. Case Study 1: Combined Outdoor/Indoor Trajectory
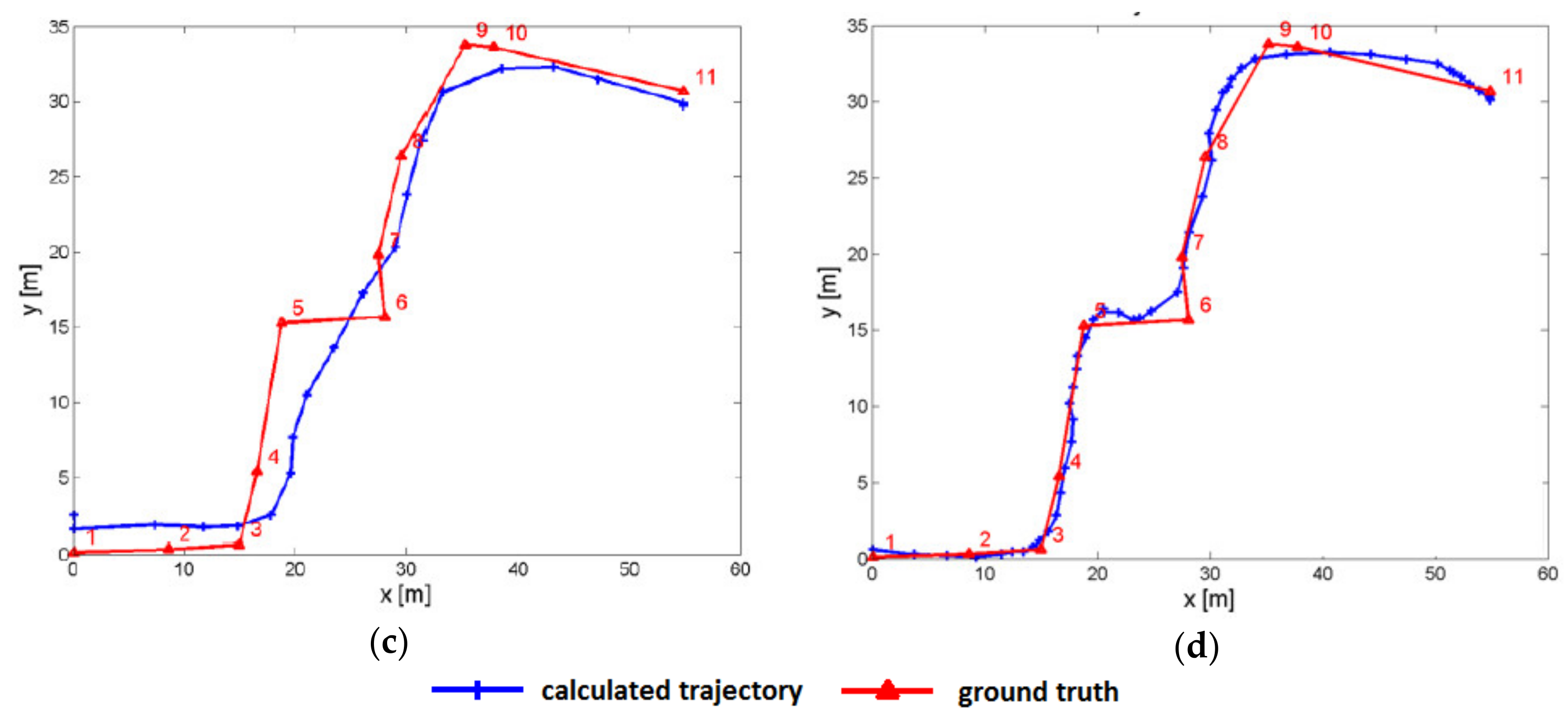
4.2. Case Study 2: Continuous Indoor Trajectory Estimation
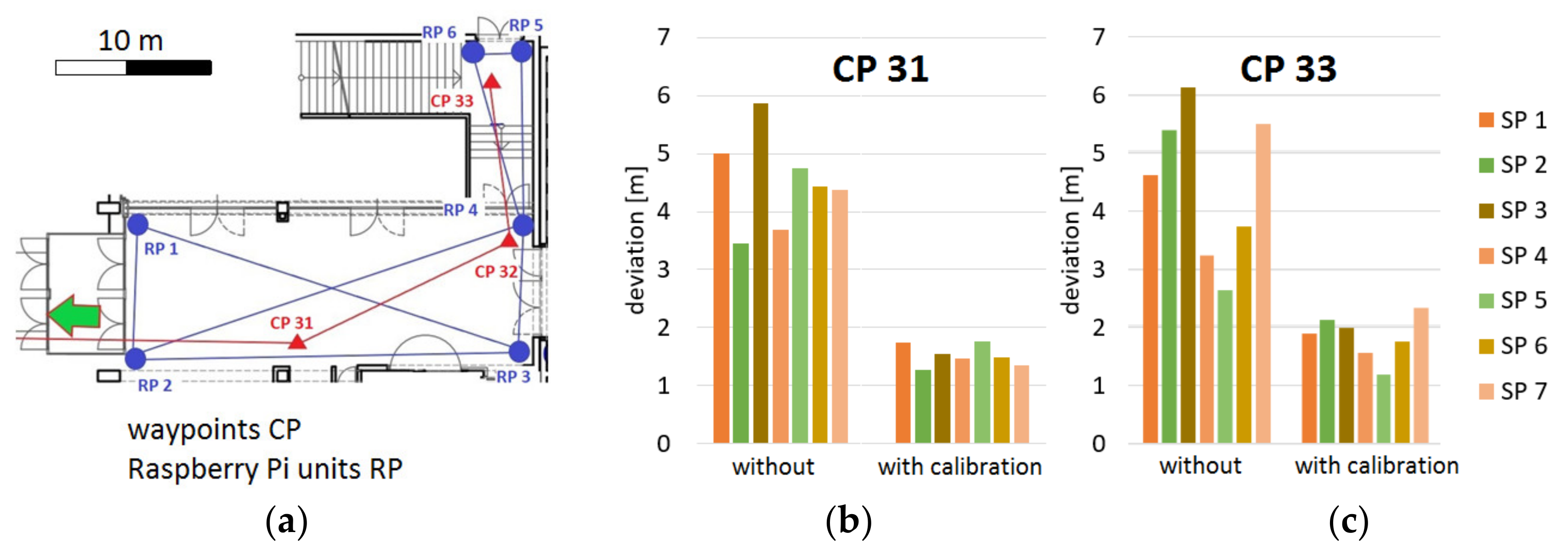
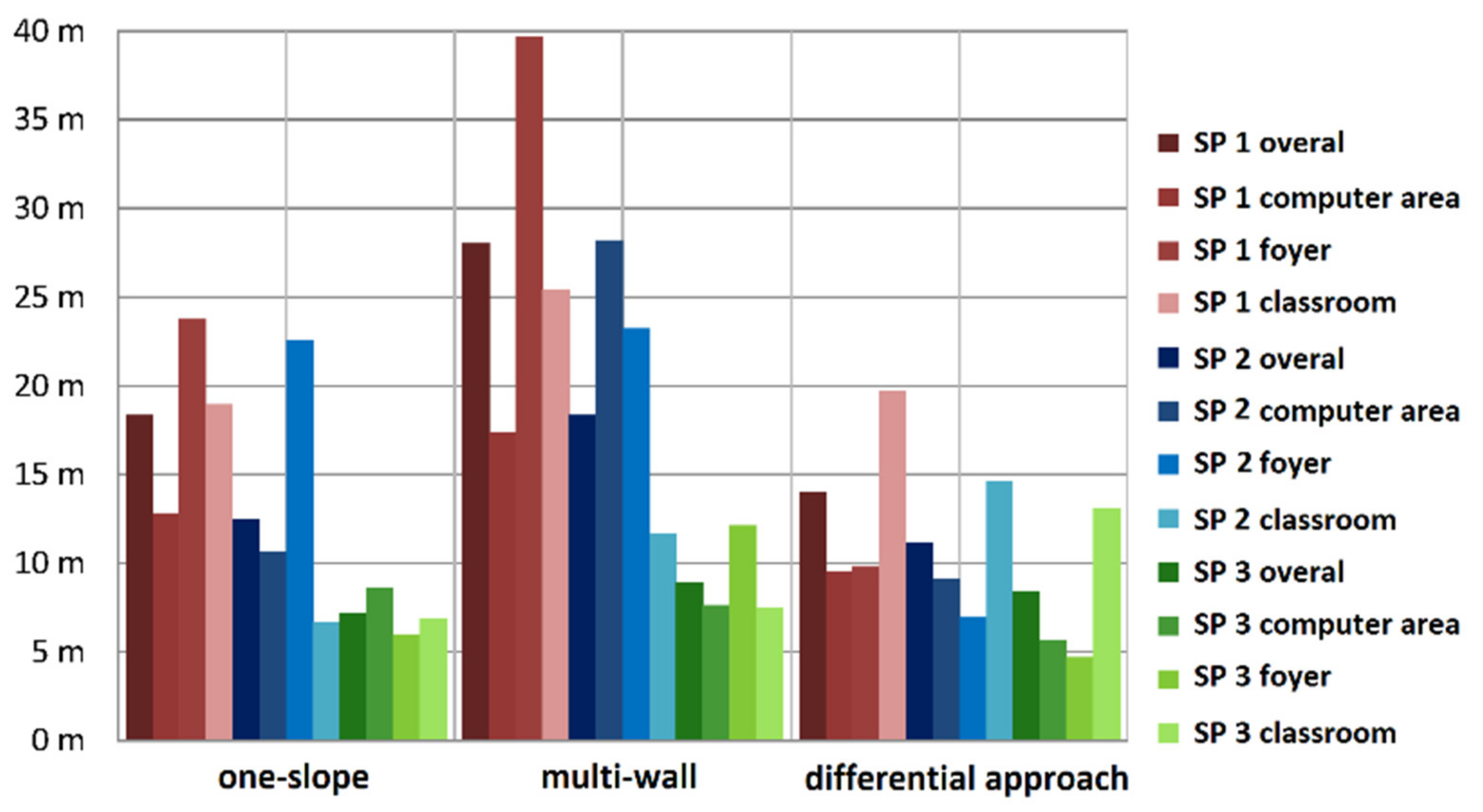
4.3. Case Study 3: DWi-Fi
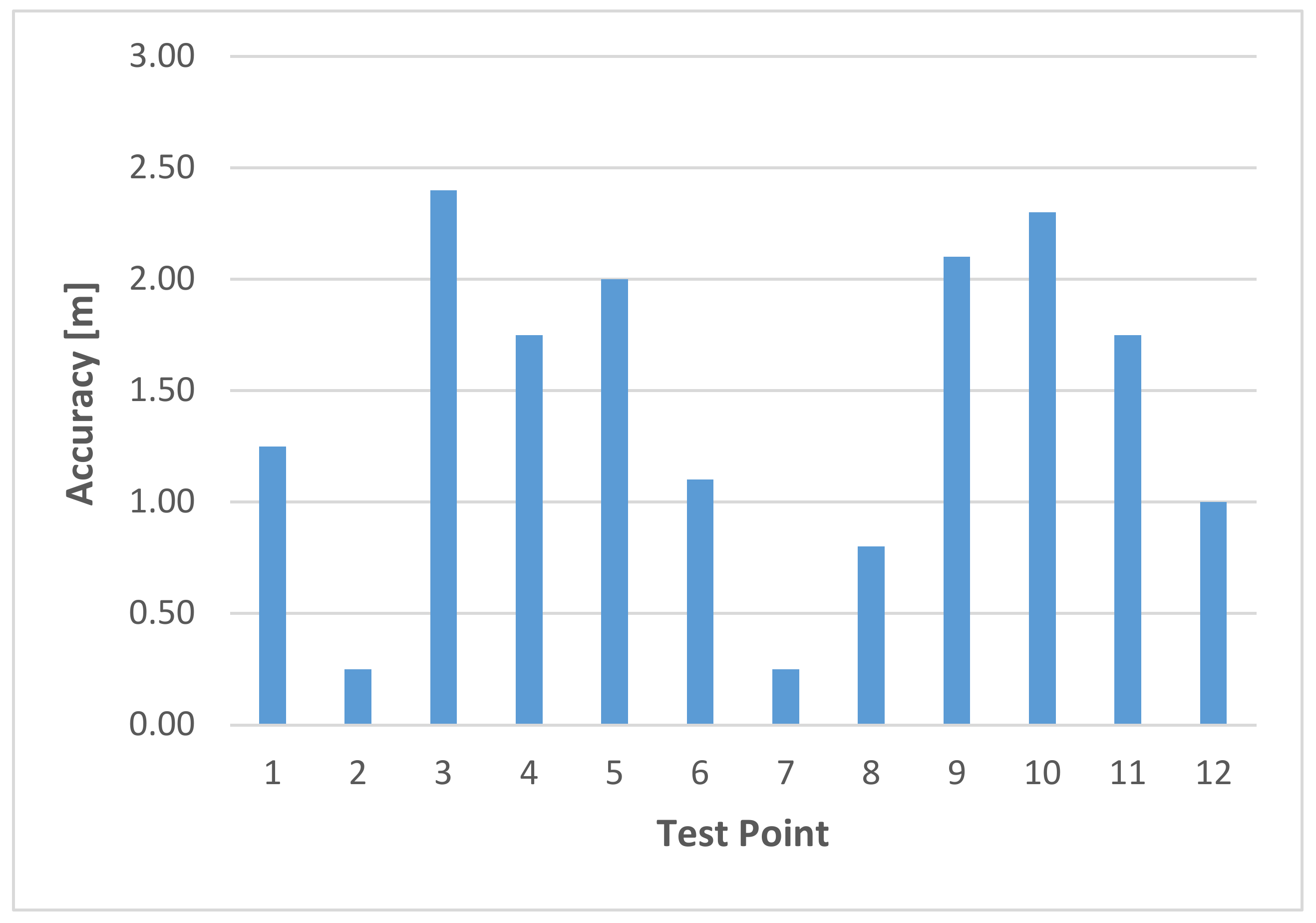
4.4. Case Study 4: Wi-Fi RTT
4.5. Summary of the Major Findings
5. Evolution of Wi-Fi Localization
6. Conclusions and Outlook
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, R.; Pei, L.; Liu, J.; Leppäkoski, H. WLAN and Bluetooth Positioning in Smart Phones. In Ubiquitous Positioning and Mobile Location-Based Services in Smart Phones; IGI Global: Hershey, PA, USA, 2012; pp. 44–68. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Retscher, G. Indoor Navigation. In Encyclopedia of Geodesy; Earth Sciences Series; Grafarend, E.W., Ed.; Springer International Publishing: Cham, Switzerland, 2016; 7p. [Google Scholar]
- Stojanović, D.; Stojanović, N. Indoor Localization and Tracking: Methods, Technologies and Research Challenges. Facta Univ. Ser. Autom. Control. Robot. 2014, 13, 57–72. [Google Scholar]
- Li, B.; Rizos, C. Editorial: Special Issue International Conference on Indoor Positioning and Navigation 2012, Part 2. J. Locat. Based Serv. 2014, 8, 1–2. [Google Scholar] [CrossRef]
- Pritt, N. Indoor location with Wi-Fi fingerprinting. In Proceedings of the Applied Imagery Pattern Recognition Workshop (AIPR): Sensing for Control and Augmentation, Washington, DC, USA, 23–25 October 2013; pp. 1–8. [Google Scholar]
- Castro, P.; Chiu, P.; Kremenek, T.; Muntz, R.R. A Probabilistic Room Location Service for Wireless Networked Environments. In Proceedings of the International Conference on Ubiquitous Computing, Göteborg, Sweden, 29 September–1 October 2001; pp. 18–34. [Google Scholar]
- Chen, Y.; Lymberopoulos, D.; Liu, J.; Priyantha, B. FM-based indoor localization. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Lake District, UK, 29 June–2 July 2012; pp. 169–182. [Google Scholar]
- Jiang, Y.; Xiang, Y.; Pan, X.; Li, K.; Lv, Q.; Dick, R.P.; Shang, L.; Hannigan, M. Hallway based automatic indoor floorplan construction using room fingerprints. In Proceedings of the 2013 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Zurich, Switzerland, 8–12 September 2013; pp. 315–324. [Google Scholar]
- Jiang, Y.; Pan, X.; Li, K.; Lv, Q.; Dick, R.P.; Hannigan, M.; Shang, L. ARIEL: Automatic Wi-Fi Based Room Fingerprinting for Indoor Localization. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 441–450. [Google Scholar]
- Li, Y.; Barthelemy, J.; Sun, S.; Perez, P.; Moran, B. A Case Study of WiFi Sniffing Performance Evaluation. IEEE Access 2020, 8, 129224–129235. [Google Scholar] [CrossRef]
- Li, Y.; Williams, S.; Moran, B.; Kealy, A.; Retscher, G. High-Dimensional Probabilistic Fingerprinting in Wireless Sensor Networks Based on a Multivariate Gaussian Mixture Model. Sensors 2018, 18, 2602. [Google Scholar] [CrossRef] [PubMed]
- Van Diggelen, F.; Want, R.; Wang, W. How to Achieve 1-m Accuracy in Android. GPS World, 3 July 2018. [Google Scholar]
- Horn, B.K.P. Doubling the Accuracy of Indoor Positioning: Frequency Diversity. Sensors 2020, 20, 1489. [Google Scholar] [CrossRef]
- Retscher, G.; Tatschl, T. Indoor positioning using differential Wi-Fi lateration. J. Appl. Geod. 2017, 11, 249–269. [Google Scholar] [CrossRef]
- Li, S.; Hedley, M.; Bengston, K.; Johnson, M.; Humphrey, D.; Kajan, A.; Bhaskar, N. TDOA-based passive localization of standard WiFi devices. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services UPINLBS, Wuhan, China, 22–23 March 2018. [Google Scholar]
- Batistic, L.; Tomic, M. Overview of indoor positioning system technologies. In Proceedings of the 41st International Convention on Information and Communication Technology, Electronics and Microelectronics MIPRO, Opatija, Croatia, 21–25 May 2018. [Google Scholar]
- Schnabel, P. Elektronik-Kompendium.de. Available online: https://www.elektronik-kompendium.de/ (accessed on 14 July 2020). (In German).
- Liu, J.; Chen, R.; Pei, L.; Guinness, R.; Kuusniemi, H. A Hybrid Smartphone Indoor Positioning Solution for Mobile LBS. Sensors 2012, 12, 17208–17233. [Google Scholar] [CrossRef] [PubMed]
- Kaemarungsi, K.; Krishnamurthy, P. Properties of indoor received signal strength for WLAN location fingerprinting. In Proceedings of the Mobile and Ubiquitous Systems: Networking and Services MOBIQUITOUS 2004, Boston, MA, USA, 26–26 August 2004; pp. 14–23. [Google Scholar]
- Luntovskyy, A.; Gütter, D.; Melnyk, I. Planung und Optimierung von Rechnernetzen; Springer Science and Business Media: Wiesbaden, Germany, 2012. (In German) [Google Scholar]
- Li, H.; Chen, X.; Jing, G.; Wang, Y.; Cao, Y.; Li, F.; Zhang, X.; Xiao, H. An Indoor Continuous Positioning Algorithm on the Move by Fusing Sensors and Wi-Fi on Smartphones. Sensors 2015, 15, 31244–31267. [Google Scholar] [CrossRef]
- Luo, J.; Zhan, X. Characterization of Smart Phone Received Signal Strength Indication for WLAN Indoor Positioning Accuracy Improvement. J. Netw. 2014, 9, 739–746. [Google Scholar] [CrossRef]
- Rai, A.; Chintalapudi, K.K.; Padmanabhan, V.N.; Sen, R. Zee: Zero-effort Crowdsourcing for Indoor Localization. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking Mobicom’12, Istanbul, Turkey, 22–26 August 2012; pp. 293–304. [Google Scholar]
- Shen, G.; Chen, Z.; Zhang, P.; Moscibroda, T.; Zhang, Y. Walkiemarkie: Indoor Pathway Mapping Made Easy. In Proceedings of the 10th USENIX Conference on Networked Systems Design and Implementation NSDI’13, Lombard, IL, USA, 2–5 April 2013; pp. 85–98. [Google Scholar]
- Yang, Z.; Wu, C.; Liu, Y. Locating in fingerprint space. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking Mobicom’12, Istanbul, Turkey, 22–26 August 2012; pp. 269–280. [Google Scholar]
- Wu, C.; Yang, Z.; Liu, Y. Smartphones Based Crowdsourcing for Indoor Localization. IEEE Trans. Mob. Comput. 2015, 14, 444–457. [Google Scholar] [CrossRef]
- Zhou, B.; Li, Q.; Mao, Q.; Tu, W.; Zhang, X.; Chen, L. ALIMC: Activity Landmark-Based Indoor Mapping via Crowdsourcing. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2774–2785. [Google Scholar] [CrossRef]
- Retscher, G.; Leb, A. Influence of the RSSI Scan Duration of Smartphones in Kinematic Wi-Fi Fingerprinting (paper 9743). In Proceedings of the FIG Working Week, Hanoi, Vietnam, 22–26 April 2019; 15p. [Google Scholar]
- Chen, X.; Kong, J.; Guo, Y.; Chen, X. An empirical study of indoor localization algorithms with densely deployed APs. In Proceedings of the Global Communications Conference GLOBECOM, Austin, TX, USA, 8–12 December 2014; pp. 517–522. [Google Scholar]
- Meng, X.L.; Rubin, D.B. Maximum Likelihood Estimation via the ECM Algorithm: A General Framework. Biometrika 1993, 80, 267–278. [Google Scholar] [CrossRef]
- Dempster, A.P.; Laird, N.M.; Rubin, D.B. Maximum Likelihood from Incomplete Data Via theEMAlgorithm. J. R. Stat. Soc. Ser. B 1977, 39, 1–22. [Google Scholar] [CrossRef]
- Dong, Y.; Peng, C.-Y.J. Principled missing data methods for researchers. SpringerPlus 2013, 2, 222. [Google Scholar] [CrossRef]
- Caso, G.; De Nardis, L.; Lemic, F.; Handziski, V.; Wolisz, A.; Di Benedetto, M.-G. ViFi: Virtual Fingerprinting WiFi-Based Indoor Positioning via Multi-Wall Multi-Floor Propagation Model. IEEE Trans. Mob. Comput. 2020, 19, 1478–1491. [Google Scholar] [CrossRef]
- Lott, M.; Forkel, I. A multi-wall-and-floor model for indoor radio propagation. In Proceedings of the IEEE VTS 53rd Vehicular Technology Conference, Spring 2001, Rhodes, Greece, 6–9 May 2001; 5p. [Google Scholar] [CrossRef]
- LeDoux, H.; Gold, C. An Efficient Natural Neighbour Interpolation Algorithm for Geoscientific Modelling. In Developments in Spatial Data Handling; Fisher, P.F., Ed.; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar] [CrossRef]
- Fortune, S.; Diagrams, V. Voronoi Diagrams and Delaunay Triangulations. In Handbook of Discrete and Computational Geometry, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2017; pp. 705–721. [Google Scholar]
- Lee, M.; Han, D. Voronoi Tessellation Based Interpolation Method for Wi-Fi Radio Map Construction. IEEE Commun. Lett. 2012, 16, 404–407. [Google Scholar] [CrossRef]
- Krige, D.G. A Statistical Approach to Some Mine Valuations and Allied Problems at the Witwatersrand. Master’s Thesis, The University of Witwatersrand, Witwatersrand, South Africa, 1951. [Google Scholar]
- Cressie, N. The origins of kriging. Math. Geol. 1990, 22, 239–252. [Google Scholar] [CrossRef]
- Stigler, S.M. Gergonne’s 1815 paper on the design and analysis of polynomial regression experiments. Hist. Math. 1974, 1, 431–439. [Google Scholar] [CrossRef]
- Hofer, H.; Retscher, G. Seamless navigation using GNSS and Wi-Fi/IN with intelligent checkpoints. J. Locat. Based Serv. 2017, 11, 204–221. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the 19th Annual Joint Conference of the IEEE Computer and Communications Societies INFOCOM 2000, Tel-Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Roos, T.; Myllymaki, P.; Tirri, H. A statistical modeling approach to location estimation. IEEE Trans. Mob. Comput. 2002, 1, 59–69. [Google Scholar] [CrossRef]
- Honkavirta, V.; Perälä, T.; Ali-Löytty, S.; Piché, R. A comparative survey of WLAN location fingerprinting methods. In Proceedings of the IEEE 6th Workshop on Positioning Navigation and Communication WPNC’09, Hannover, Germany, 19 March 2009; pp. 243–251. [Google Scholar]
- Moghtadaiee, V.; Dempster, A.G. Vector Distance Measure Comparison in Indoor Location Fingerprinting. In Proceedings of the International Global Navigation Satellite Systems IGNSS 2015 Conference, Gold Coast, Australia, 14–16 July 2015. [Google Scholar]
- Retscher, G.; Joksch, J. Analysis of Nine Vector Distances for Fingerprinting in Multiple-SSID Wi-Fi Networks. In Proceedings of the 7th International Conference Indoor Positioning and Indoor Navigation IPIN 2016, Alcalá de Henares, Spain, 4–7 October 2016; 5p. [Google Scholar]
- Bahl, P.; Padmanabhan, V. RADAR: An In-Building RF-Based User Location and Tracking System. In Proceedings of the 2nd Workshop on Positioning, Navigation and Communication Ultra-Wideband Expert (UET’05), Magdeburg, Germany, 20–25 November 2005; pp. 775–784. [Google Scholar]
- Huang, H. Post Hoc Indoor Localization Based on RSS Fingerprinting in WLAN. Master’s Thesis, University of Massachusetts, Boston, MA, USA, 2014. [Google Scholar]
- Rojo, J.; Corvalan, C.; Unger, F.; Lopez, S.M.; Soteras, I.; Bravo, D.C.; Torres-Sospedra, J.; Mendoza-Silva, G.M.; Cidral, G.R.; Laiapea, J.; et al. Machine Learning applied to Wi-Fi fingerprinting: The experiences of the Ubiqum Challenge. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar]
- Figuera, C.; Rojo-Álvarez, J.-L.; Wilby, M.; Mora-Jiménez, I.; Caamaño, A.J. Advanced support vector machines for 802.11 indoor location. Signal. Process. 2012, 92, 2126–2136. [Google Scholar] [CrossRef]
- Koch, K.-R. Einführung in Die Bayes-Statistik; Springer: Berlin/Heidelberg, Germany, 2000; (In German). [Google Scholar] [CrossRef]
- Gordon, N.; Salmond, D.; Smith, A. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proc. F 1993, 140, 107. [Google Scholar] [CrossRef]
- Khalajmehrabadi, A.; Gatsis, N.; Akopian, D. Modern WLAN Fingerprinting Indoor Positioning Methods and Deployment Challenges. IEEE Commun. Surv. Tutor. 2017, 19, 1974–2002. [Google Scholar] [CrossRef]
- Yeung, W.M.; Zhou, J.; Ng, J.K.-Y. Enhanced Fingerprint-Based Location Estimation System in Wireless LAN Environment. In Proceedings of the Emerging Directions in Embedded and Ubiquitous Computing Conference EUC 2007, Taipei, Taiwan, 17–20 December 2007; Lecture Notes in Computer Science. Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar] [CrossRef]
- Leb, A.; Retscher, G. Studie für ein campusweites Positionierungs- und Navigationssystem an der TU Wien basierend auf WLAN. Österreichische Zeitschrift for Vermessung und Geoinformation VGI, Österreichische Gesellschaft für Vermessung und Geoinformation. 2020; under review. (In German) [Google Scholar]
- Seitz, J.; Vaupel, T.; Meyer, S.; Boronat, J.G.; Thielecke, J. A Hidden Markov Model for pedestrian navigation. In Proceedings of the 2010 IEEE 7th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 11–12 March 2010; pp. 120–127. [Google Scholar]
- Park, I.; Bong, W.; Kim, Y.C. Hidden Markov Model Based Tracking of a Proxy RP in Wi-Fi Localization. In Proceedings of the 2011 IEEE 73rd Vehicular Technology Conference (VTC Spring), Budapest, Hungary, 15–18 May 2011; pp. 1–5. [Google Scholar]
- He, X.; Aloi, D.N.; Li, J. Probabilistic Multi-Sensor Fusion Based Indoor Positioning System on a Mobile Device. Sensors 2015, 15, 31464–31481. [Google Scholar] [CrossRef] [PubMed]
- Rabiner, L.R. A tutorial on hidden Markov models and selected applications in speech recognition. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; Volume 77, pp. 257–286. [Google Scholar]
- Forney, G.D. The viterbi algorithm. Proc. IEEE 1973, 61, 268–278. [Google Scholar] [CrossRef]
- Correa, J.; Katz, E.; Collins, P.; Griss, M. Room-Level Wi-Fi Location Tracking; Report; Carnegie Mellon Silicon Valley: Mountain View, CA, USA, 2008. [Google Scholar]
- Retscher, G.; Li, Y.; Williams, S.; Kealy, A.; Moran, B.; Goel, S.; Gabela, J. Wi-Fi Positioning Using a Network Differential Approach for Real-time Calibration. In Proceedings of the IGNSS 2018 Conference, Sydney, Australia, 7–9 February 2018; 15p. [Google Scholar]
- Liu, J.; Chen, R.; Pei, L.; Chen, W.; Tenhunen, T.; Kuusniemi, H.; Kröger, T.; Chen, Y. Accelerometer assisted robust wireless signal positioning based on a hidden Markov model. In Proceedings of the IEEE/ION Position, Location and Navigation Conference (PLANS) 2010, Indian Wells, CA, USA, 4–6 May 2010; pp. 488–497. [Google Scholar] [CrossRef]
- Sagias, N.C.; Karagiannidis, G.K. Gaussian Class Multivariate Weibull Distributions: Theory and Applications in Fading Channels. IEEE Trans. Inf. Theory 2005, 51, 3608–3619. [Google Scholar] [CrossRef]
- Rappaport, T.S. Wireless Communications: Principles and Practice; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Retscher, G.; Zhu, M.; Zhang, K. RFID Positioning. In Ubiquitous Positioning and Mobile Location-Based Services in Smart Phones; Chen, R., Ed.; IGI Global: Hershey, PA, USA, 2012; pp. 69–95. [Google Scholar]
- Guo, G.; Chen, R.; Ye, F.; Peng, X.; Liu, Z.; Pan, Y. Indoor Smartphone Localization: A Hybrid WiFi RTT-RSS Ranging Approach. IEEE Access 2019, 7, 176767–176781. [Google Scholar] [CrossRef]
- Ibrahim, M.; Liu, H.; Jawahar, M.; Nguyen, V.; Gruteser, M.; Howard, R.; Bai, F. Verification: Accuracy Evaluation of WiFi Fine Time Measurements on an Open Platform. In Proceedings of the 24th Annual International Conference on Mobile Computing and Networking Mobicom’18, New Delhi, India, 29 October–2 November 2018. [Google Scholar]
- Kulkarni, A.; Lim, A. Preliminary Study on Indoor Localization using Smartphone-Based IEEE 802.11mc. In Proceedings of the 15th International Conference on Emerging Networking Experiments and Technologies CoNEXT ’19, Orlando, FL, USA, 9–12 December 2019. [Google Scholar]
- Retscher, G. Fusion of Location Fingerprinting and Trilateration Based on the Example of Wi-Fi Positioning. In ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences; ISPRS Geospatial Week: Wuhan, China, 2017; Volume IV-2/W4, pp. 377–384. [Google Scholar]
- Bai, Y.B.; Kealy, A.; Retscher, G.; Hoden, L. A Comparative Evaluation of Wi-Fi RTT and GPS Based Positioning. In Proceedings of the International Global Navigation Satellite Systems IGNSS 2020 Conference, Sydney, Australia, 5–7 February 2020. [Google Scholar]
- King, T.; Kopf, S.; Haenselmann, T.; Lubberger, C.; Effelsberger, W. COMPASS: A Probabilistic Indoor Positioning System Based on 802.11 and Digital Compasses. In Proceedings of the 1st ACM Workshop on Wireless Network Testbeds, Experimental Evaluation and Characterization WiNTECH, Los Angeles, CA, USA, 29 September 2006. [Google Scholar]
- Kessel, M.; Werner, M. SMARTPOS: Accurate and Precise Indoor Positioning on Mobile Phones. In Proceedings of the 1st International Conference on Mobile Services, Resources, and Users MOBILITY, Barcelona, Spain, 23–29 October 2011. [Google Scholar]
- Kim, W.; Yang, S.; Gerla, M.; Lee, E.-K. Crowdsource Based Indoor Localization by Uncalibrated Heterogeneous Wi-Fi Devices. Mob. Inf. Syst. 2016, 2016, 1–18. [Google Scholar] [CrossRef]
- Dari, Y.E.; Suyoto, S.S.; Pranowo, P. CAPTURE: A Mobile Based Indoor Positioning System using Wireless Indoor Positioning System. Int. J. Interact. Mob. Technol. 2018, 12, 61–72. [Google Scholar] [CrossRef][Green Version]
- Abbas, M.; Elhamshary, M.; Rizk, H.; Torki, M.; Youssef, M. WiDeep: WiFi-based Accurate and Robust Indoor Localization System using Deep Learning. In Proceedings of the International Conference on Pervasive Computing and Communications PerCom, Kyoto, Japan, 11–15 March 2019. [Google Scholar]
- Hou, Y.; Yang, X.; Abbasi, Q. Efficient AoA-Based Wireless Indoor Localization for Hospital Outpatients Using Mobile Devices. Sensors 2018, 18, 3698. [Google Scholar] [CrossRef] [PubMed]
- Kaemarungsi, K.; Krishnamurthy, P. Analysis of WLAN’s received signal strength indication for indoor location fingerprinting. Pervasive Mob. Comput. 2012, 8, 292–316. [Google Scholar] [CrossRef]
- Huang, J.; Millman, D.; Quigley, M.; Stavens, D.; Thrun, S.; Aggarwal, A. Efficient, generalized indoor WiFi GraphSLAM. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation ICRA, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Retscher, G.; Kealy, A.; Gabela, J.; Li, Y.; Goel, S.; Toth, C.K.; Masiero, A.; Błaszczak-Bąk, W.; Gikas, V.; Perakis, H.; et al. A benchmarking measurement campaign in GNSS-denied/challenged indoor/outdoor and transitional environments. J. Appl. Geod. 2020, 14, 215–229. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 802.11 | a | b | g | n | ac | ax | |||
|---|---|---|---|---|---|---|---|---|---|
| alternative notation | - | - | - | - | Wi-Fi 4 | Wi-Fi 5 | Wi-Fi 6 | ||
| publishing year | 1997 | 1999 | 1999 | 2003 | 2009 | 2013 | 2019 | ||
| frequency band [GHz] | 2.4 | 5 | 2.4 | 2.4 | 2.4 | 5 | 5 | 2.4 | 5 |
| bandwidth [MHz] | 22 | 20 | 22 | 20 | 20, 40 | 20, 40, 80, 160 | 20, 40, 80, 160 | ||
| usable channels | 13 | 19 | 13 | 13 | 13 | 19 | 19 | 8 | |
| range [m] | 20–100 | 35–120 | 40–140 | 40–140 | 250 | 50 | N/A | ||
| Material | Damping [dB] |
|---|---|
| thin wall | 2–5 |
| brick wall | 6–12 |
| concrete wall | 10–20 |
| concrete ceiling | 20–40 |
| double glazing | 25–35 |
| CP 13 | CP 14 | |||
|---|---|---|---|---|
| 2.4 GHz | 5 GHz | 2.4 GHz | 5 GHz | |
| Orientation 1 | 4.8 | 8.1 | - | - |
| Orientation 2 | 4.4 | 7.9 | 6.6 | 8.3 |
| Orientation 3 | - | - | 6.8 | 8.1 |
| Orientation 4 | 4.3 | 7.3 | 5.4 | 8.9 |
| 4.5 | 7.7 | 6.3 | 8.4 | |
| freq. [GHz] | P0 [dB] | γ [–] | |
|---|---|---|---|
| office building | 2.4 | 40.2 | 4.2 |
| corridor | 2.4 | 40.2 | 1.2 |
| office building | 5 | 46.8 | 4.6 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Retscher, G. Fundamental Concepts and Evolution of Wi-Fi User Localization: An Overview Based on Different Case Studies. Sensors 2020, 20, 5121. https://doi.org/10.3390/s20185121
Retscher G. Fundamental Concepts and Evolution of Wi-Fi User Localization: An Overview Based on Different Case Studies. Sensors. 2020; 20(18):5121. https://doi.org/10.3390/s20185121
Chicago/Turabian StyleRetscher, Guenther. 2020. "Fundamental Concepts and Evolution of Wi-Fi User Localization: An Overview Based on Different Case Studies" Sensors 20, no. 18: 5121. https://doi.org/10.3390/s20185121
APA StyleRetscher, G. (2020). Fundamental Concepts and Evolution of Wi-Fi User Localization: An Overview Based on Different Case Studies. Sensors, 20(18), 5121. https://doi.org/10.3390/s20185121