Rate Dependent Krasnoselskii-Pokrovskii Modeling and Inverse Compensation Control of Piezoceramic Actuated Stages



Abstract
1. Introduction
2. Rate-Dependent Hysteresis Modeling of Piezoceramic Actuated Stages
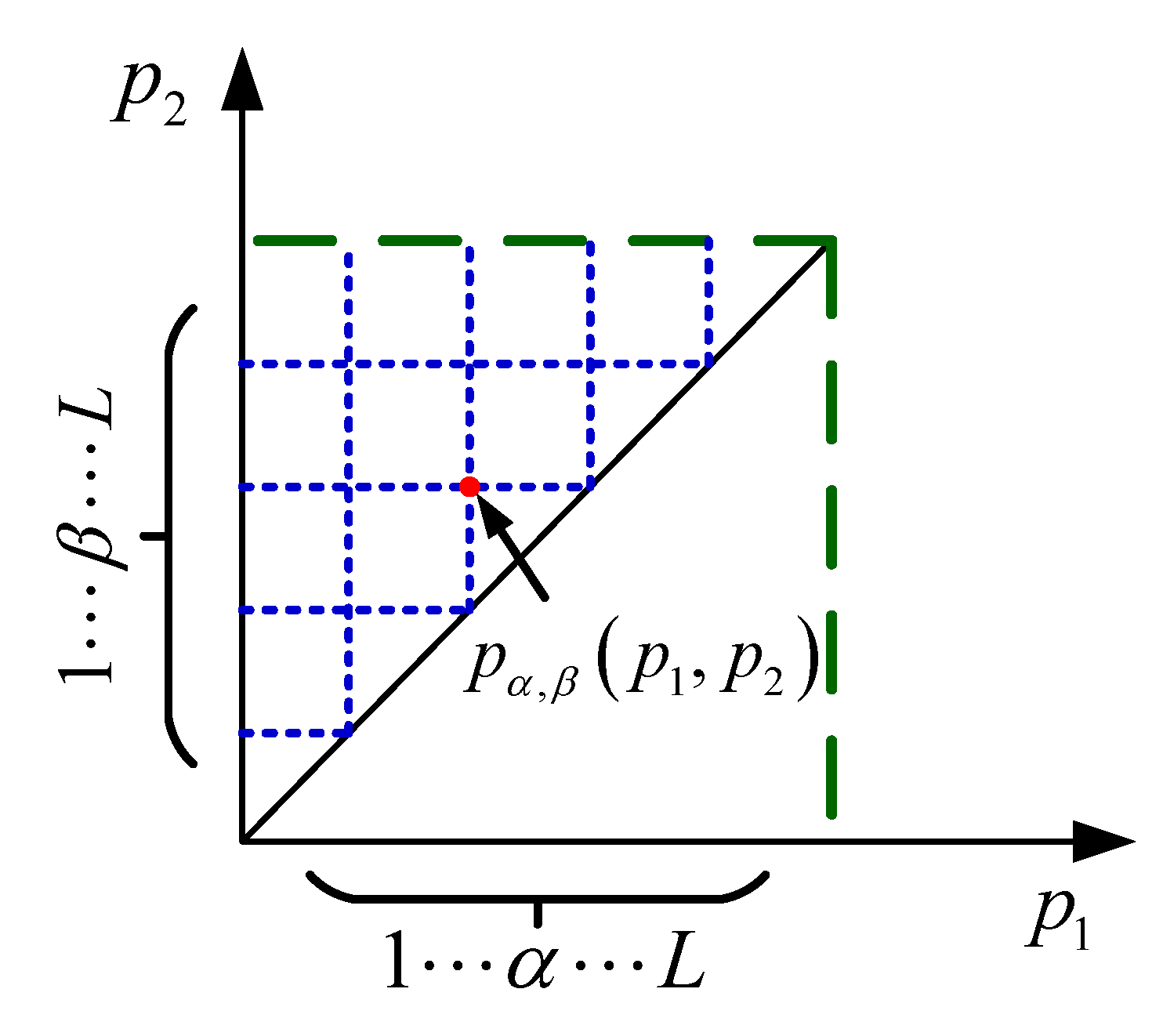
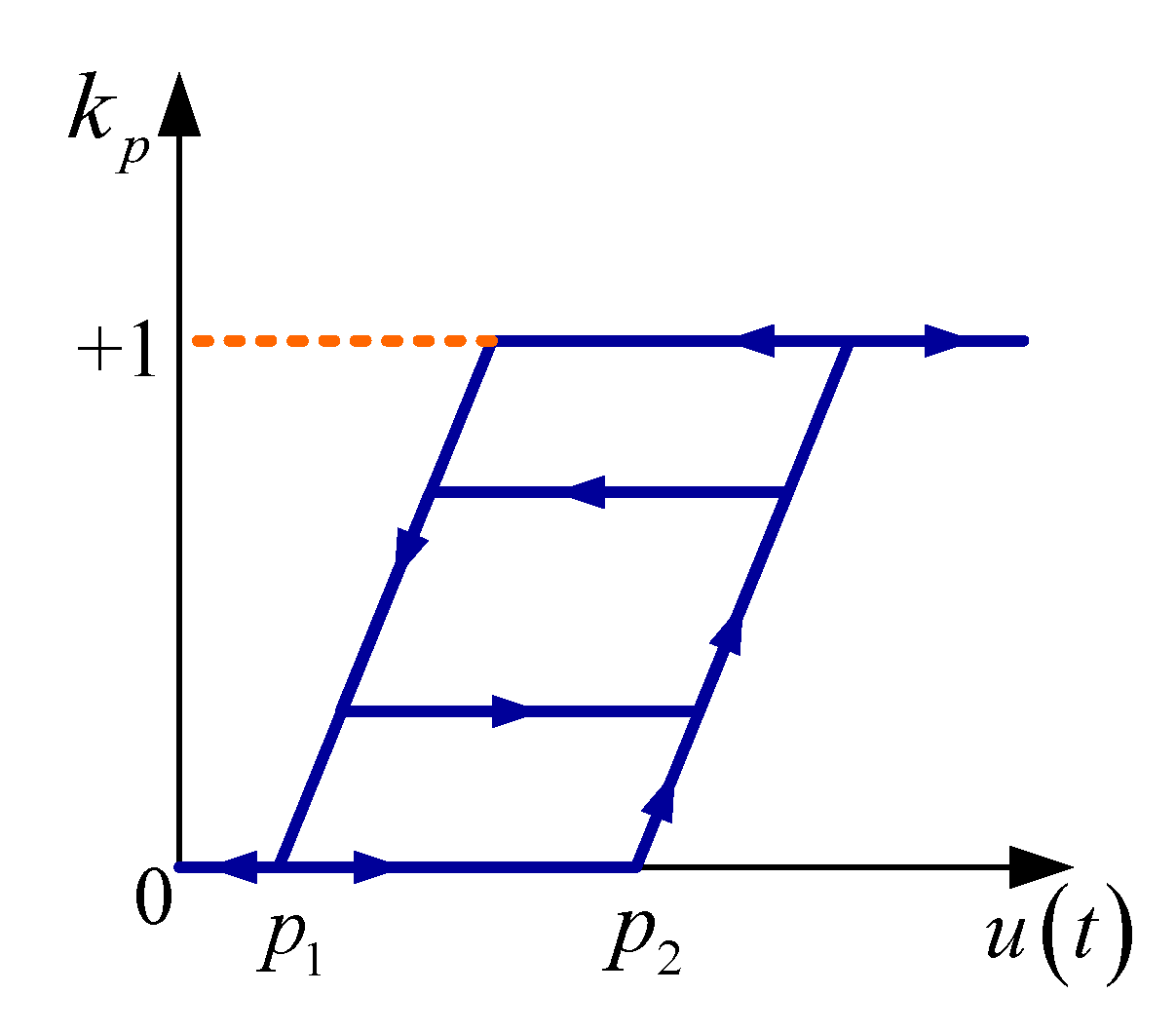
2.1. Rate-Dependent Krasnoselskii-Pokrovskii Model
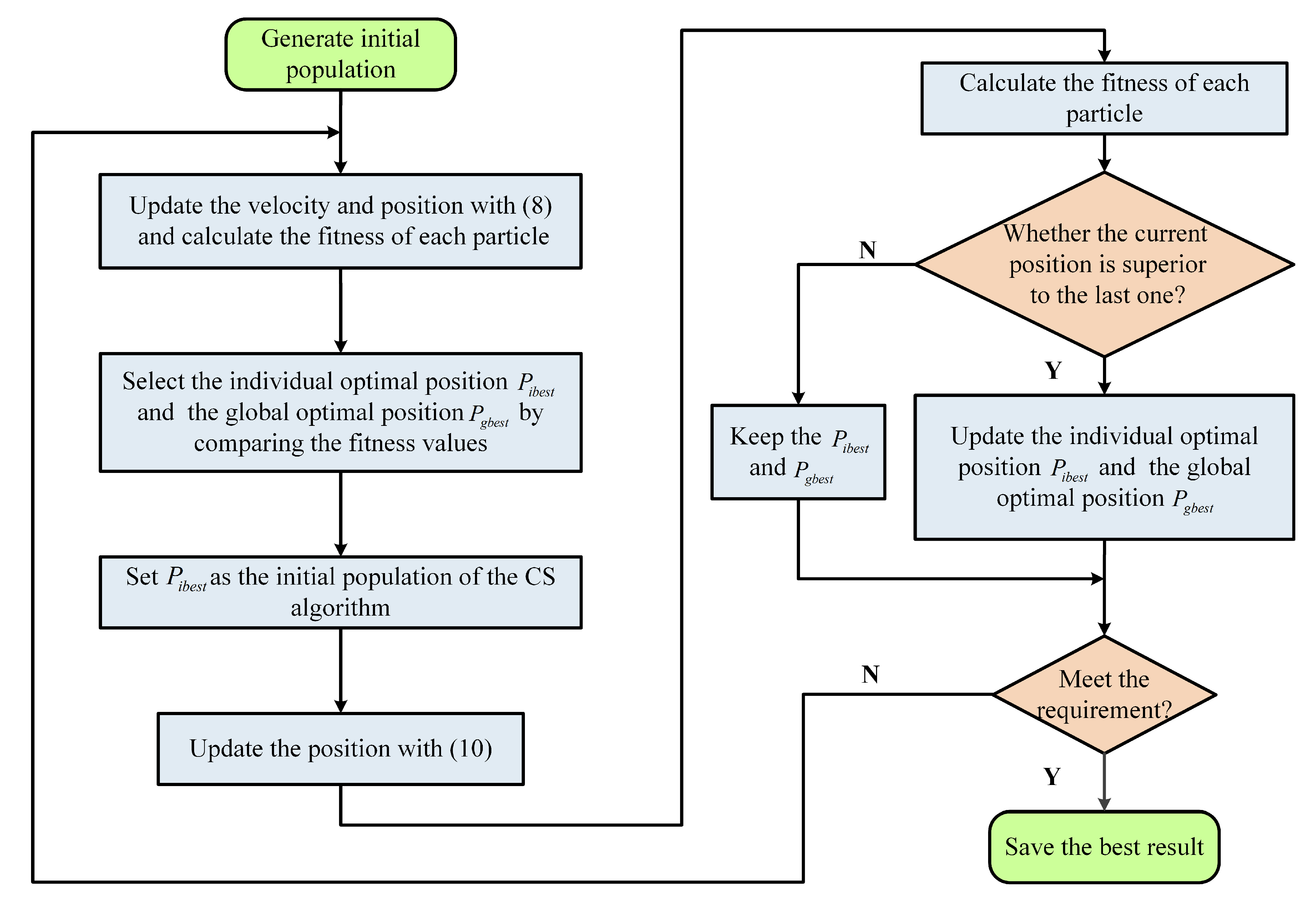
2.2. Identification of the Density Function by Hybrid Optimization Algorithm of Particle Swarm and Cuckoo Search
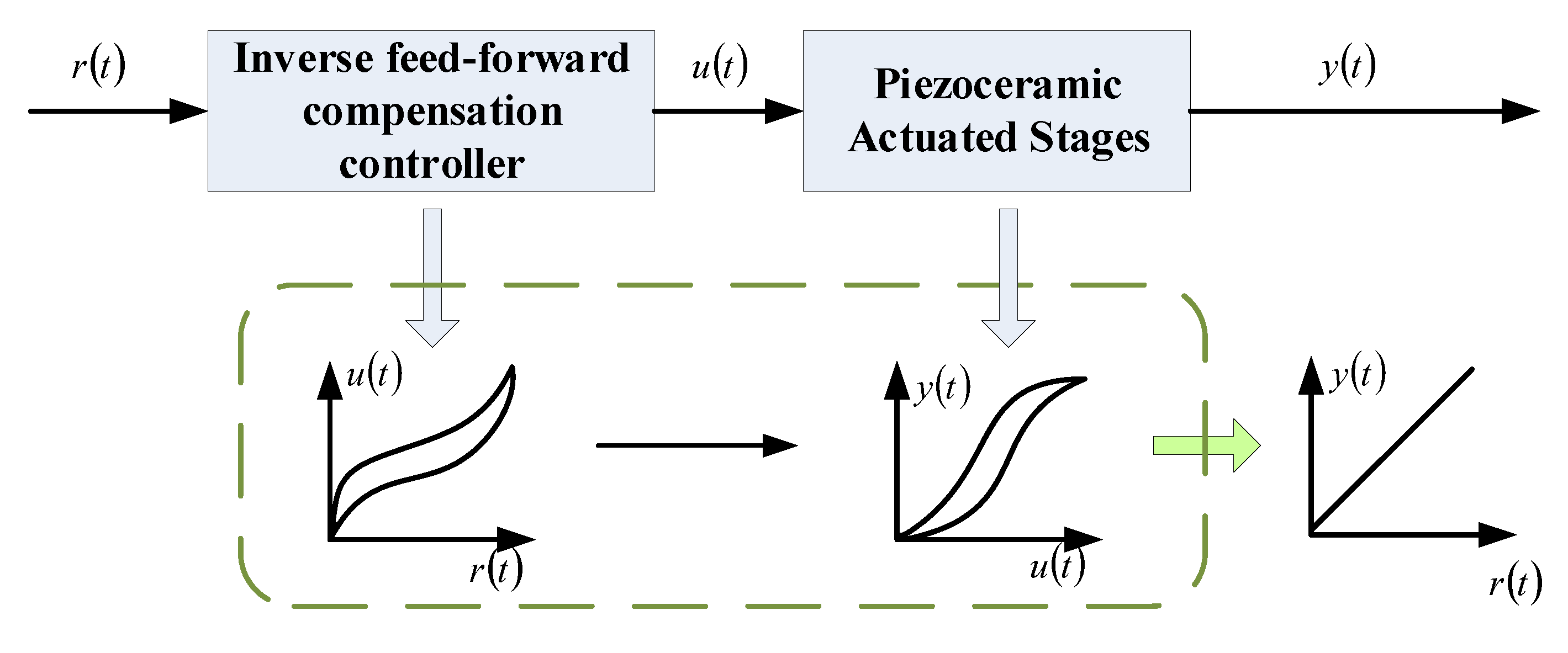
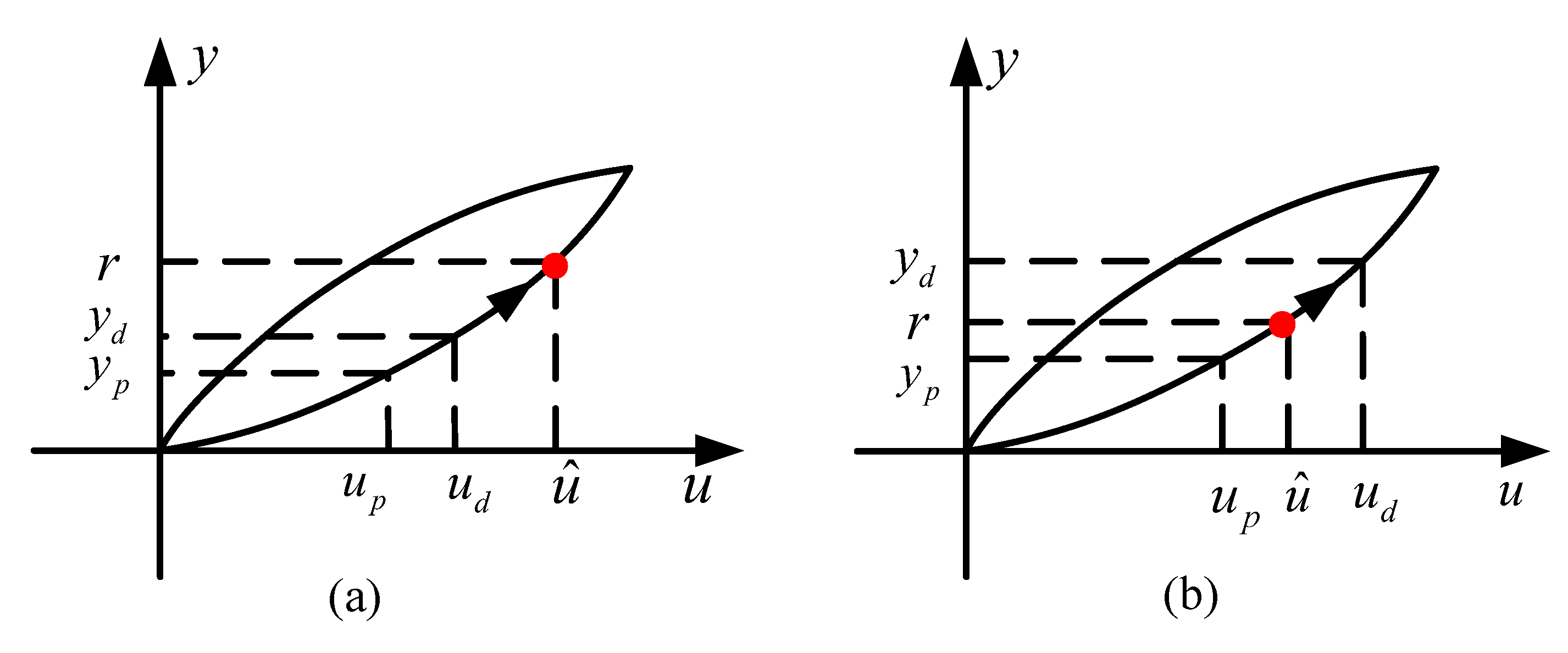
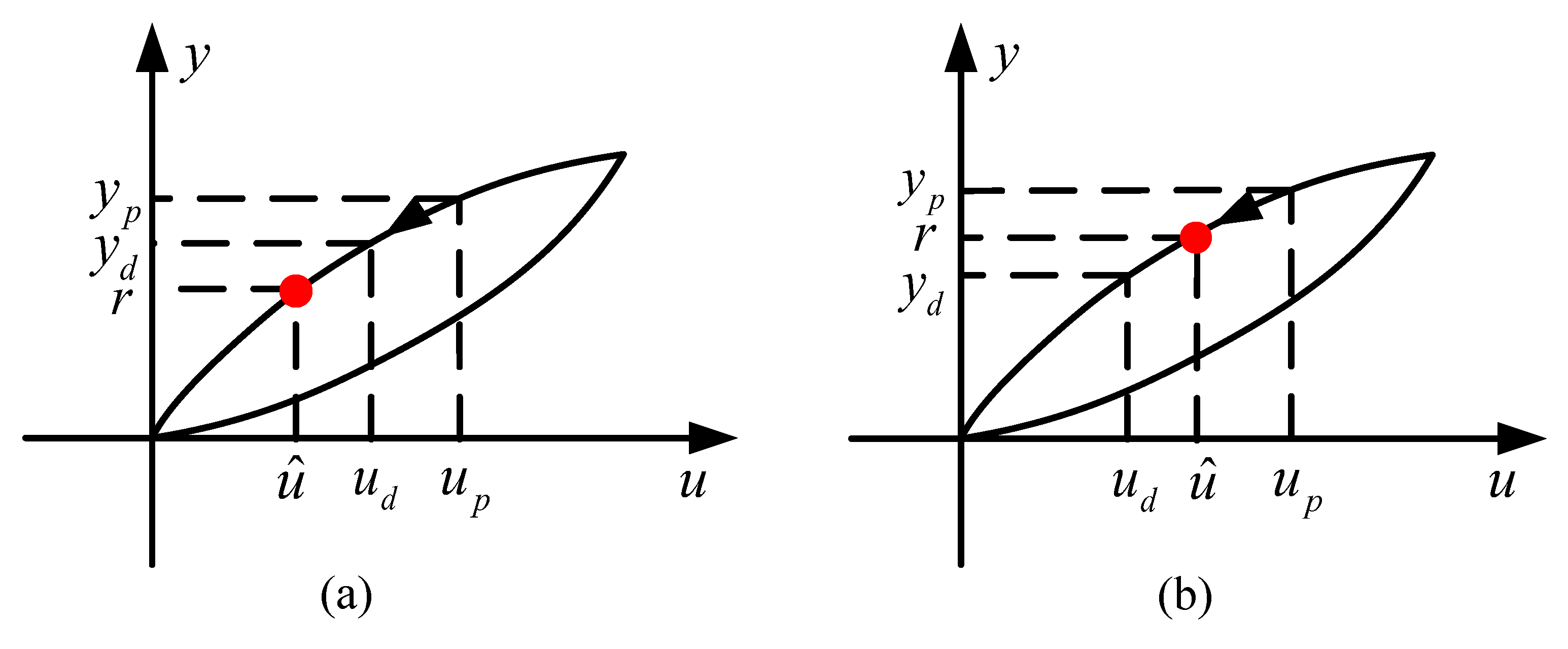
3. Inverse Feed-Forward Compensation Control Based on Recursive Method
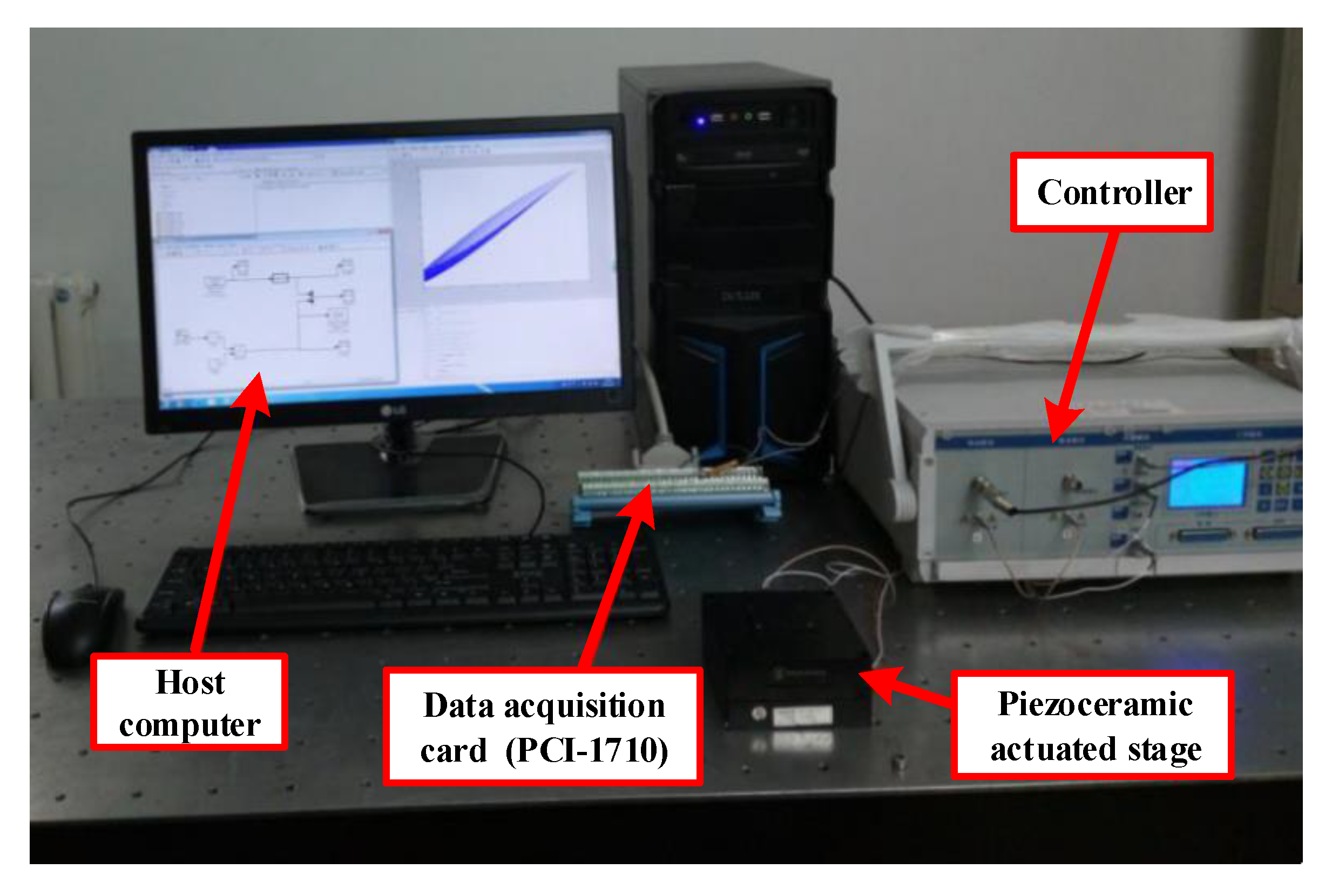
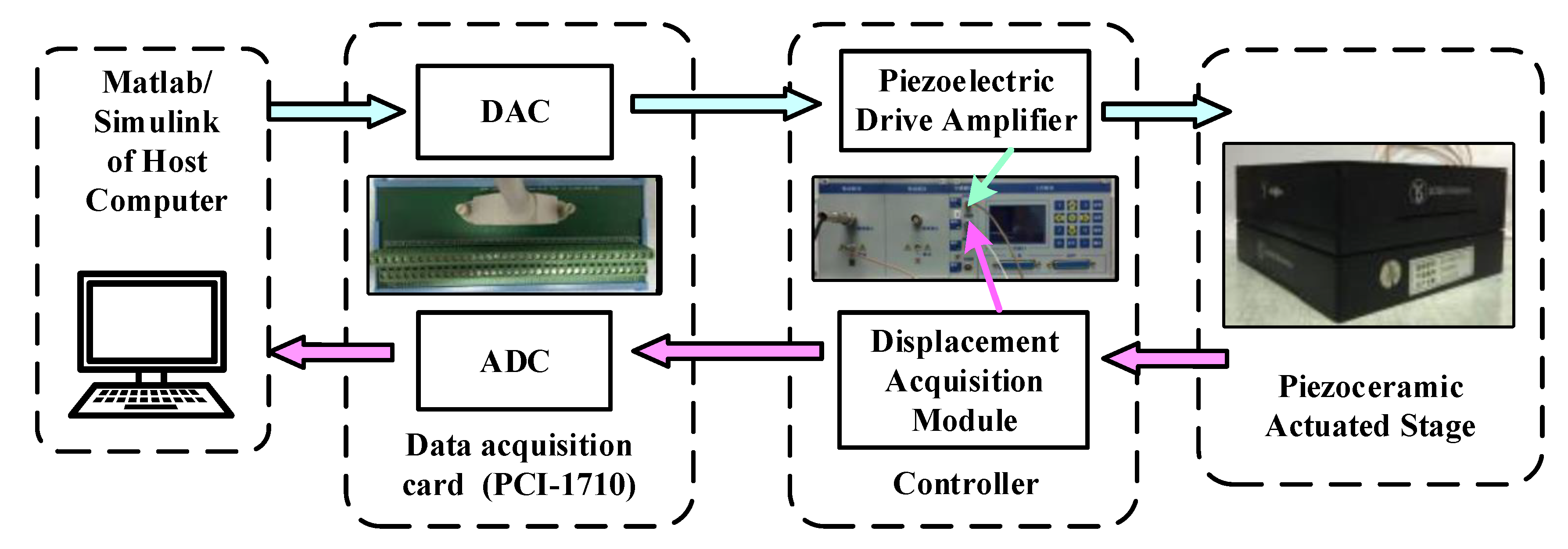
4. Experimental Results
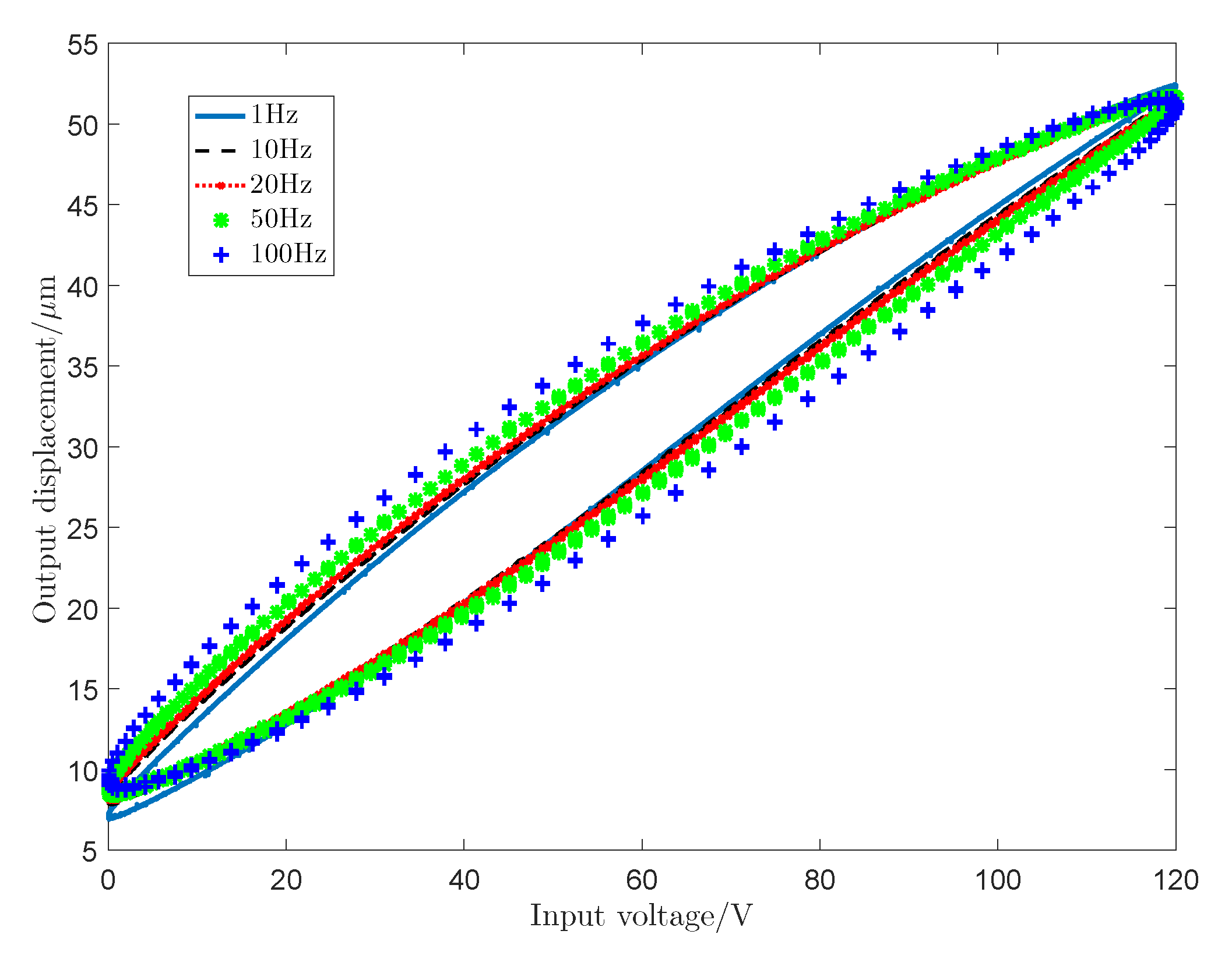
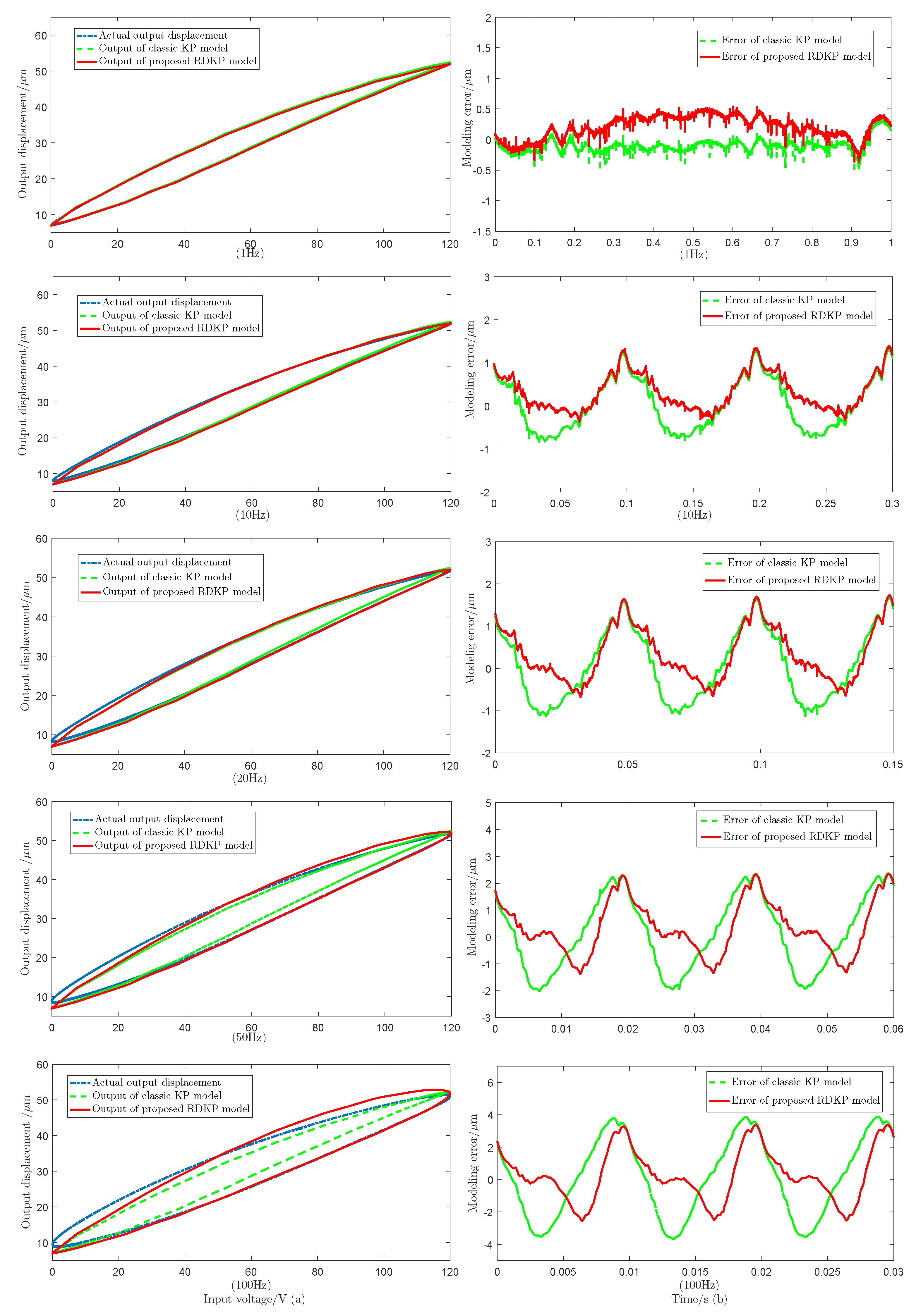
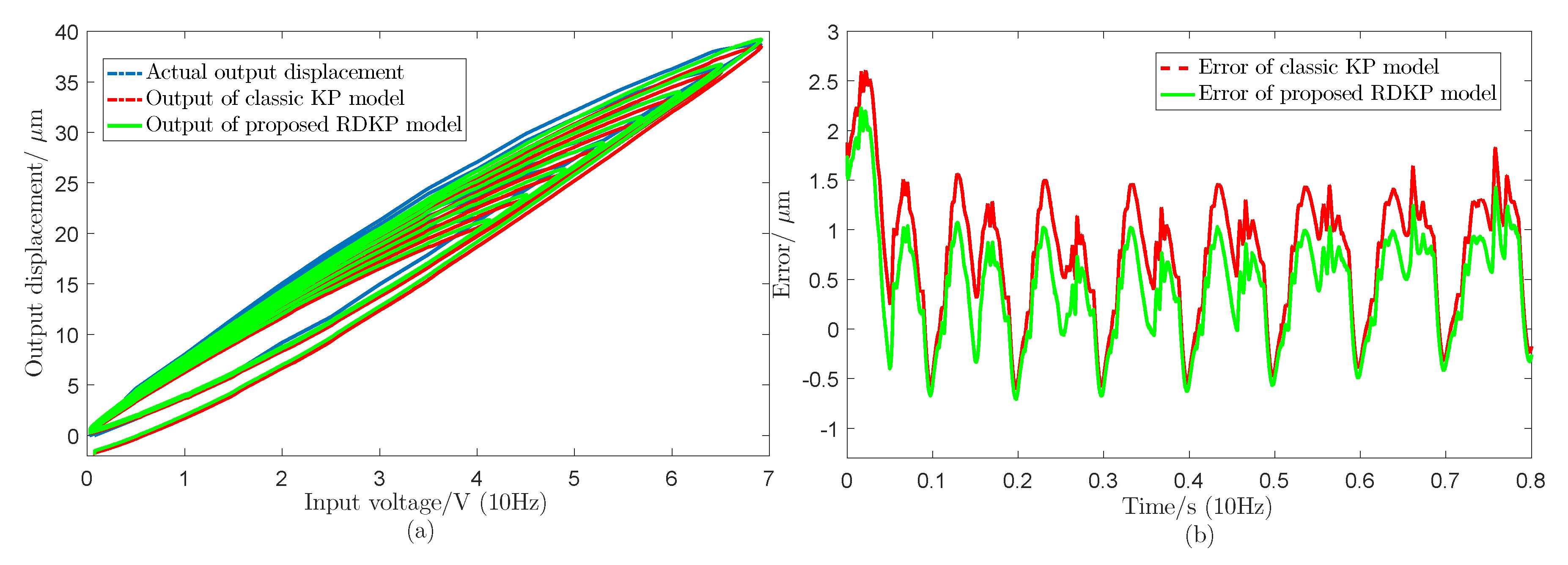
4.1. The Experimental Results of the Rate-Dependent Kp Model
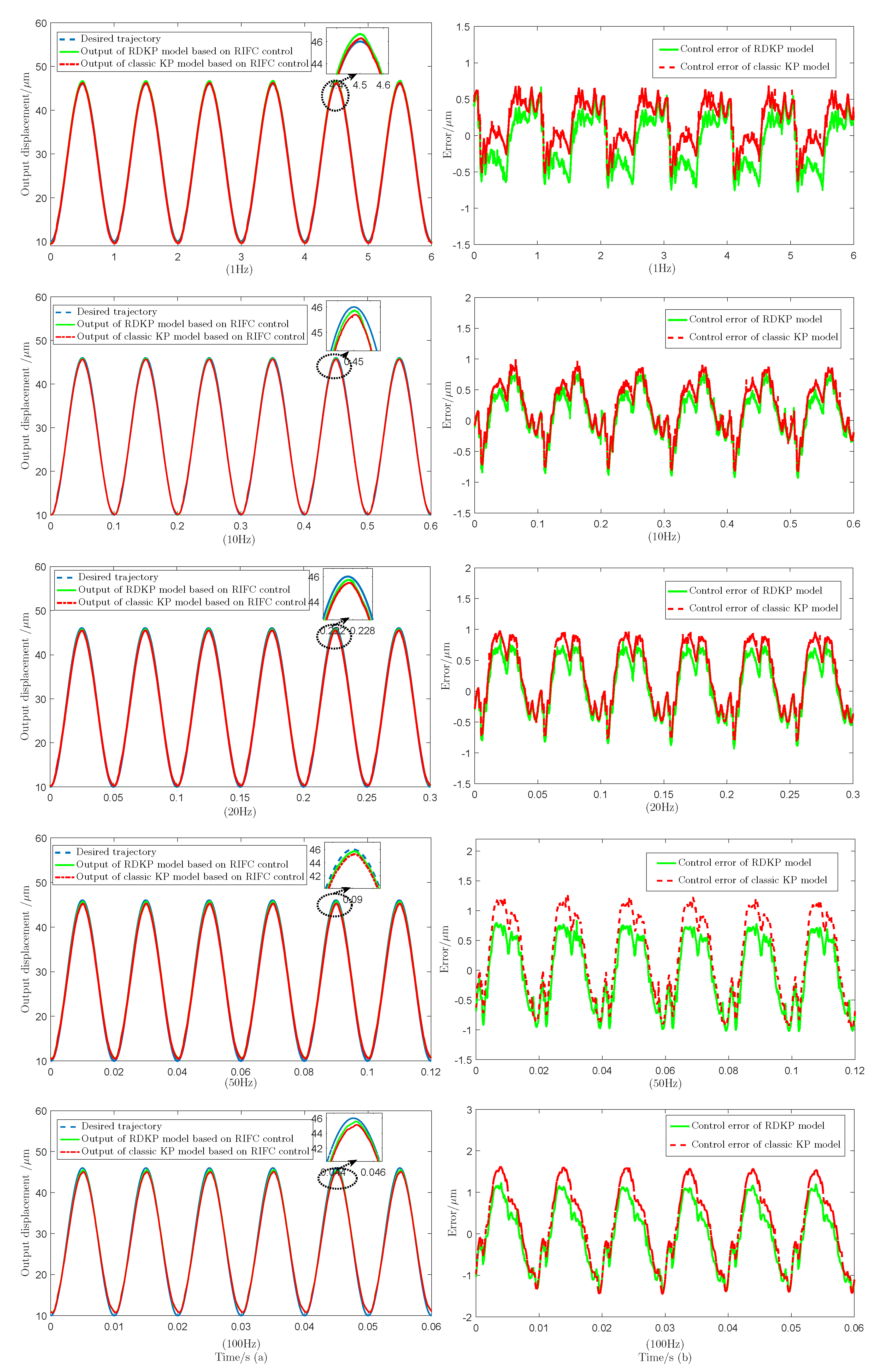
4.2. The Experimental Results of the Recursive Inverse Feed-Forward Compensation Control
4.2.1. Displacement Tracking Control under the Sinusoidal Reference Signals
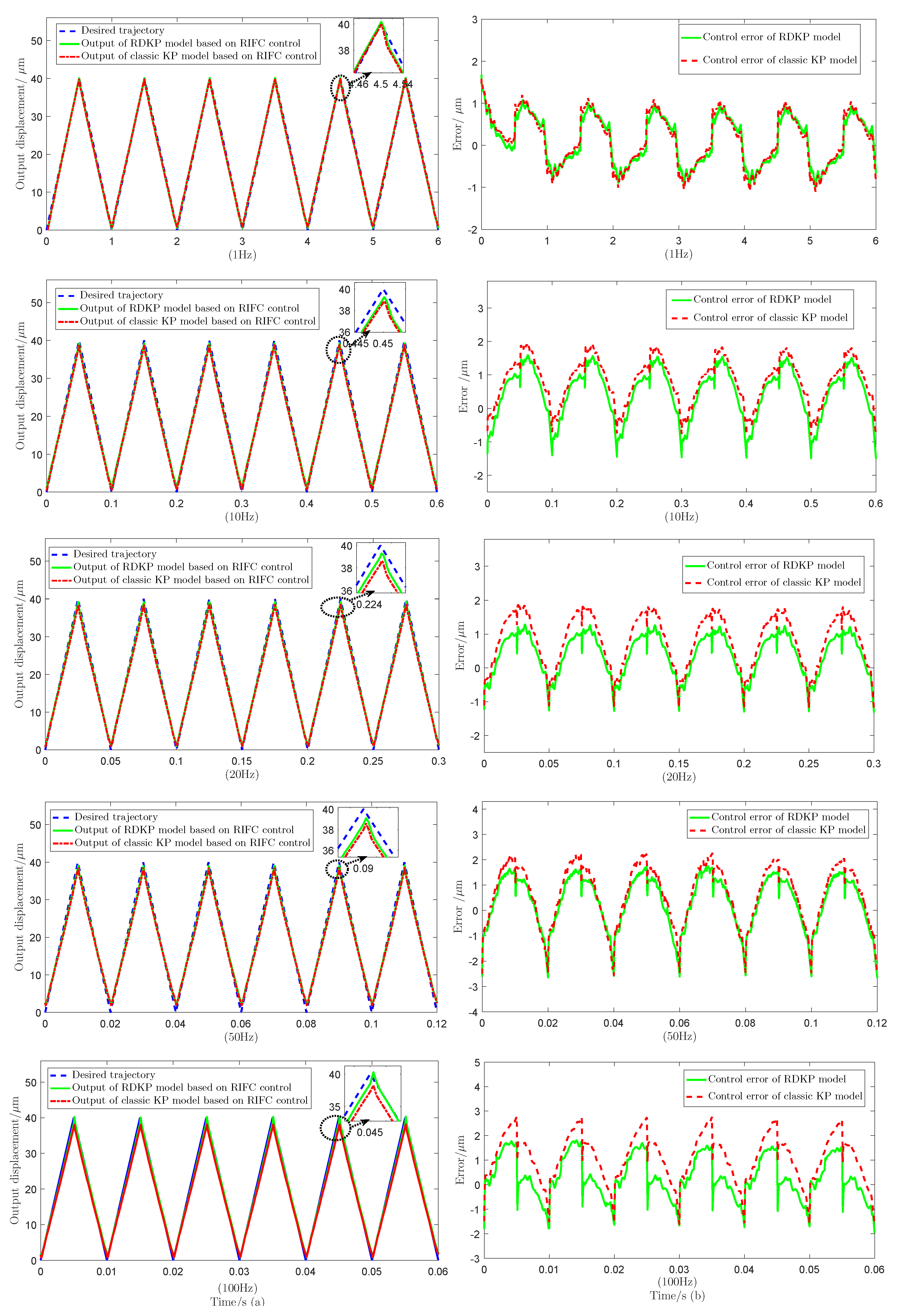
4.2.2. Displacement Tracking Control under the Triangular Reference Signals
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dosch, J.J.; Inman, D.J.; Garcia, E. A Self-Sensing Piezoelectric Actuator for Collocated Control. J. Intell. Mater. Syst. Struct. 1992, 3, 166–185. [Google Scholar] [CrossRef]
- Li, Y.R.; Su, C.C.; Lin, W.J.; Chang, S.H. Piezoelectric Sensor to Measure Soft and Hard Stiffness with High Sensitivity for Ultrasonic Transducers. Sensors 2015, 15, 13670–13679. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, X.; Zhu, G.; Su, C.Y. Output Feedback Adaptive Motion Control and Its Experimental Verification for Time-Delay Nonlinear Systems With Asymmetric Hysteresis. IEEE Trans. Ind. Electron. 2020, 67, 6824–6834. [Google Scholar] [CrossRef]
- Soderberg, O.; Aaltio, I.; Ge, Y.L.; Liu, X.W.; Hannula, S.P. Recent Developments of Magnetic SMA. Adv. Sci. Technol. 2008, 59, 1–10. [Google Scholar] [CrossRef]
- Liu, S.H.; Huang, T.S.; Yen, J.Y. Tracking control of shape-memory-alloy actuators based on self-sensing feedback and inverse hysteresis compensation. Sensors 2009, 10, 112–127. [Google Scholar] [CrossRef] [PubMed]
- Vaiana, N.; Sessa, S.; Marmo, F.; Rosati, L. A class of uniaxial phenomenological models for simulating hysteretic phenomena in rate-independent mechanical systems and materials. Nonlinear Dyn. 2018, 93, 1647–1669. [Google Scholar] [CrossRef]
- Vaiana, N.; Sessa, S.; Rosati, L. A generalized class of uniaxial rate-independent models for simulating asymmetric mechanical hysteresis phenomena. Mech. Syst. Signal Process. 2021, 146, 106984. [Google Scholar] [CrossRef]
- Dimian, M.; Andrei, P. Noise-Driven Phenomena in Hysteretic Systems; Springer: New York, NY, USA, 2013. [Google Scholar]
- Wang, D.H.; Liao, W.H. Magnetorheological fluid dampers: A review of parametric modelling. Smart Mater. Struct. 2011, 20, 23001. [Google Scholar] [CrossRef]
- Zhou, M.; Yang, P.; Wang, J.; Gao, W. Adaptive Sliding Mode Control Based on Duhem Model for Piezoelectric Actuators. Iete Tech. Rev. 2016, 33, 557–568. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Wu, Z.; Gao, W.; Zhou, M. A hopfield neural network-based Bouc-Wen model for magnetic shape memory alloy actuator. AIP Adv. 2020, 10, 15212. [Google Scholar] [CrossRef]
- Xu, R.; Zhang, X.; Guo, H.; Zhou, M. Sliding Mode Tracking Control With Perturbation Estimation for Hysteresis Nonlinearity of Piezo-Actuated Stages. IEEE Access 2018, 6, 30617–30629. [Google Scholar] [CrossRef]
- Wang, Y.; Rui, X.; Zhou, M. Prandtl-Ishlinskii Modeling for Giant Magnetostrictive Actuator Based on Internal Time-Delay Recurrent Neural Network. IEEE Trans. Magn. 2018, 54, 1–4. [Google Scholar]
- Zhou, M.; Xu, R.; Zhang, Q.; Wang, Z.; Zhao, Y. Hybrid Control Method of Magnetically Controlled Shape Memory Alloy Actuator Based on Inverse Prandtl-Ishlinskii Model. J. Electr. Eng. Technol. 2016, 11, 1457–1465. [Google Scholar] [CrossRef]
- Song, G.; Zhao, J.; Zhou, X.; Abreu-Garcia, J.A.D. Tracking Control of a Piezoceramic Actuator with Hysteresis Compensation Using Inverse Preisach Model. IEEE ASME Trans. Mechatron. 2005, 10, 198–209. [Google Scholar] [CrossRef]
- Li, Z.; Shan, J.; Gabbert, U. Inverse Compensation of Hysteresis Using Krasnoselskii-Pokrovskii Model. IEEE ASME Trans. Mechatron. 2018, 23, 966–971. [Google Scholar] [CrossRef]
- Banks, H.T.; Kurdila, A.J. Hysteretic control influence operators representing smart material actuators: Identification and approximation. In Proceedings of the IEEE Conference on Decision & Control, Kobe, Japan, 11–13 December 1996; pp. 3711–3716. [Google Scholar]
- Zhou, M.; He, S.; Hu, B.; Zhang, Q. Modified KP Model for Hysteresis of Magnetic Shape Memory Alloy Actuator. IETE Tech. Rev. 2015, 32, 29–36. [Google Scholar] [CrossRef]
- Wei, Z.; Xiang, B.L.; Ting, R.X. Online parameter identification of the asymmetrical Bouc-Wen model for piezoelectric actuators. Precis. Eng. J. Int. Soc. Precis. Eng. Nanotechnol. 2014, 38, 921–927. [Google Scholar] [CrossRef]
- Mayergoyz, I.D. Mathematical Models of Hysteresis; Springer: New York, NY, USA, 1991. [Google Scholar]
- Zhang, J.; Merced, E.; Sepulveda, N.; Tan, X. Optimal Compression of a Generalized Prandtl-Ishlinskii Operator in Hysteresis Modeling. In Proceedings of the ASME 2013 Dynamic Systems and Control Conference, Palo Alto, CA, USA, 21–23 October 2013. [Google Scholar]
- Xie, S.L.; Liu, H.T.; Mei, J.P.; Gu, G.Y. Modeling and compensation of asymmetric hysteresis for pneumatic artificial muscles with a modified generalized Prandtl-Ishlinskii model. Mechatronics 2018, 52, 49–57. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, X. Model order reduction for the Krasnoselskii-Pokrovskii (KP) model. Smart Mater. Struct. 2019, 28, 95001. [Google Scholar] [CrossRef]
- Zhang, C.; Yu, Y.; Wang, Y.; Zhou, M. Takagi-Sugeno Fuzzy Neural Network Hysteresis Modeling for Magnetic Shape Memory Alloy Actuator Based on Modified Bacteria Foraging Algorithm. Int. J. Fuzzy Syst. 2020, 22, 1314–1329. [Google Scholar] [CrossRef]
- Li, W.; Zhang, C.; Gao, W.; Zhou, M. Neural Network Self-Tuning Control for a Piezoelectric Actuator. Sensors 2020, 20, 3342. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Wang, Y.; Chen, X.; Su, C.Y.; Li, Z.; Wang, C.; Peng, Y. Decentralized Adaptive Neural Approximated Inverse Control for a Class of Large-Scale Nonlinear Hysteretic Systems with Time Delays. IEEE Trans. Syst. Man Cybern. 2019, 49, 2424–2437. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Zhu, G.; Chen, X.; Li, Z.; Wang, C.; Su, C.Y. Compound Adaptive Fuzzy Quantized Control for Quadrotor and Its Experimental Verification. IEEE Trans. Syst. Man Cybern. 2020, 1–13. [Google Scholar] [CrossRef]
- Rui, X.; Zhou, M. Elman Neural Network-Based Identification of Krasnosel’skii-Pokrovskii Model for Magnetic Shape Memory Alloys Actuator. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar]
- Zhou, M.; Zhang, Q. Hysteresis Model of Magnetically Controlled Shape Memory Alloy Based on a PID Neural Network. IEEE Trans. Magn. 2015, 51, 1–9. [Google Scholar]
- Li, C.; Tan, Y. A neural networks model for hysteresis nonlinearity. Sens. Actuators A 2004, 112, 49–54. [Google Scholar]
- Zhang, X.; Tan, Y.; Su, M. Modeling of hysteresis in piezoelectric actuators using neural networks. Mech. Syst. Signal Process. 2009, 23, 2699–2711. [Google Scholar] [CrossRef]
- Zhang, X.; Li, B.; Chen, X.; Li, Z.; Peng, Y.; Su, C.Y. Adaptive Implicit Inverse Control for a Class of Discrete-Time Hysteretic Nonlinear Systems and Its Application. IEEE ASME Trans. Mechatron. 2020, 25, 1. [Google Scholar] [CrossRef]
- Xu, R.; Zhou, M. A self-adaption compensation control for hysteresis nonlinearity in piezo-actuated stages based on Pi-sigma fuzzy neural network. Smart Mater. Struct. 2018, 27, 45002. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, C.; Zhou, M. NARMAX Model-Based Hysteresis Modeling of Magnetic Shape Memory Alloy Actuators. IEEE Trans. Nanotechnol. 2020, 19, 1–4. [Google Scholar] [CrossRef]
- Deng, L.; Tan, Y. Modeling hysteresis in piezoelectric actuators using NARMAX models. Sens. Actuators A Phys. 2009, 149, 106–112. [Google Scholar] [CrossRef]
- Li, W.; Chen, X. Compensation of hysteresis in piezoelectric actuators without dynamics modeling. Sens. Actuators A-Phys. 2013, 199, 89–97. [Google Scholar] [CrossRef]
- Cao, Y.; Chen, X.B. A Novel Discrete ARMA-Based Model for Piezoelectric Actuator Hysteresis. IEEE-ASME Trans. Mechatron. 2012, 17, 737–744. [Google Scholar] [CrossRef]
- Bashash, S.; Jalili, N. A Polynomial-Based Linear Mapping Strategy for Feedforward Compensation of Hysteresis in Piezoelectric Actuators. J. Dyn. Syst. Meas. Control. Trans. ASME 2008, 130, 31008. [Google Scholar] [CrossRef]
- Yang, M.; Li, C.; Gu, G.; Zhu, L. A rate-dependent Prandtl-Ishlinskii model for piezoelectric actuators using the dynamic envelope function based play operator. Front. Mech. Eng. 2015, 10, 37–42. [Google Scholar] [CrossRef]
- Li, P.; Yan, F.; Ge, C.; Wang, X.; Xu, L.; Guo, J.; Li, P. A simple fuzzy system for modelling of both rate-independent and rate-dependent hysteresis in piezoelectric actuators. Mech. Syst. Signal Process. 2013, 36, 182–192. [Google Scholar] [CrossRef]
- Xiao, S.; Li, Y. Modeling and High Dynamic Compensating the Rate-Dependent Hysteresis of Piezoelectric Actuators via a Novel Modified Inverse Preisach Model. IEEE Trans. Control Syst. Technol. 2013, 21, 1549–1557. [Google Scholar] [CrossRef]
- Deng, L.; Seethaler, R.J.; Chen, Y.; Yang, P.; Cheng, Q. Modified Elman neural network based neural adaptive inverse control of rate-dependent hysteresis. In Proceedings of the 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 2366–2373. [Google Scholar]
- Guo, Y.; Sun, G.; Wang, Y.; Mao, J. Modeling and Control of Rate-Dependent Hysteresis for PEA with MPI Model-Based Hammerstein System. In Proceedings of the 2012 International Conference on Control Engineering and Communication Technology, Liaoning, China, 7–9 December 2012; pp. 523–526. [Google Scholar]
- Tan, X.; Baras, J.S. Adaptive Identification and Control of Hysteresis in Smart Materials. IEEE Trans. Autom. Control 2005, 50, 827–839. [Google Scholar]
- Banks, H.T.; Kurdila, A.J.; Webb, G. Identification of hysteretic control influence operators representing smart actuators part I: Formulation. Math. Probl. Eng. 1997, 3, 287–328. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, M. KP model for hysteresis of piezoelectric ceramic actuators. In Proceedings of the 2015 Chinese Automation Congress (CAC), Wuhan, China, 27–29 November 2015; pp. 253–257. [Google Scholar]
- Wang, F.; Luo, L.; He, X.; Wang, Y. Hybrid optimization algorithm of PSO and Cuckoo Search. In Proceedings of the 2011 2nd International Conference on Artificial Intelligence, Management Science and Electronic Commerce (AIMSEC), Zhengzhou, China, 8–10 August 2011; pp. 1172–1175. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Frequency | Model | RMSE (m) | RE (%) |
|---|---|---|---|
| 1 Hz | KP model | 0.1482 | 0.42 |
| RDKP model | 0.2761 | 0.80 | |
| 10 Hz | KP model | 0.5997 | 1.72 |
| RDKP model | 0.5452 | 1.57 | |
| 20 Hz | KP model | 0.8345 | 2.39 |
| RDKP model | 0.7219 | 2.08 | |
| 50 Hz | KP model | 1.3916 | 3.89 |
| RDKP model | 1.0543 | 3.04 | |
| 100 Hz | KP model | 2.4464 | 7.01 |
| RDKP model | 1.6341 | 4.69 |
| Input Frequency | RIFC Control Based on KP Model (RMSE (m) / RE (%)) | RIFC Control Based on RDKP Model (RMSE (m) / RE (%)) |
|---|---|---|
| 1 Hz | 0.3435 / 1.12 | 0.3649 / 1.18 |
| 10 Hz | 0.4626 / 1.52 | 0.4028 / 1.30 |
| 20 Hz | 0.5734 / 1.89 | 0.4726 / 1.54 |
| 50 Hz | 0.7379 / 2.44 | 0.5810 / 1.90 |
| 100 Hz | 0.9416 / 3.08 | 0.7657 / 2.51 |
| Input Frequency | RIFC Control Based on KP Model (RMSE (m) / RE (%)) | RIFC Control Based on RDKP Model (RMSE (m) / RE (%)) |
|---|---|---|
| 1 Hz | 0.6325 / 2.77 | 0.5853 / 1.18 |
| 10 Hz | 1.0625 / 4.81 | 0.8862 / 3.96 |
| 20 Hz | 1.1145 / 5.06 | 0.7378 / 3.29 |
| 50 Hz | 1.3261 / 6.03 | 1.0875 / 4.87 |
| 100 Hz | 1.4649 / 6.75 | 0.9181 / 4.07 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Nie, L.; Liu, Y.; Zhou, M. Rate Dependent Krasnoselskii-Pokrovskii Modeling and Inverse Compensation Control of Piezoceramic Actuated Stages. Sensors 2020, 20, 5062. https://doi.org/10.3390/s20185062
Li W, Nie L, Liu Y, Zhou M. Rate Dependent Krasnoselskii-Pokrovskii Modeling and Inverse Compensation Control of Piezoceramic Actuated Stages. Sensors. 2020; 20(18):5062. https://doi.org/10.3390/s20185062
Chicago/Turabian StyleLi, Wenjun, Linlin Nie, Ying Liu, and Miaolei Zhou. 2020. "Rate Dependent Krasnoselskii-Pokrovskii Modeling and Inverse Compensation Control of Piezoceramic Actuated Stages" Sensors 20, no. 18: 5062. https://doi.org/10.3390/s20185062
APA StyleLi, W., Nie, L., Liu, Y., & Zhou, M. (2020). Rate Dependent Krasnoselskii-Pokrovskii Modeling and Inverse Compensation Control of Piezoceramic Actuated Stages. Sensors, 20(18), 5062. https://doi.org/10.3390/s20185062