No Free Lunch—Characterizing the Performance of 6TiSCH When Using Different Physical Layers


Abstract
1. Introduction
2. Related Work
2.1. Performance Improvement and Evaluation of 6TiSCH
2.2. IEEE802.15.4g Performance Evaluation
2.3. Hybrid Radio Utilization
3. Problem Statement and Contributions
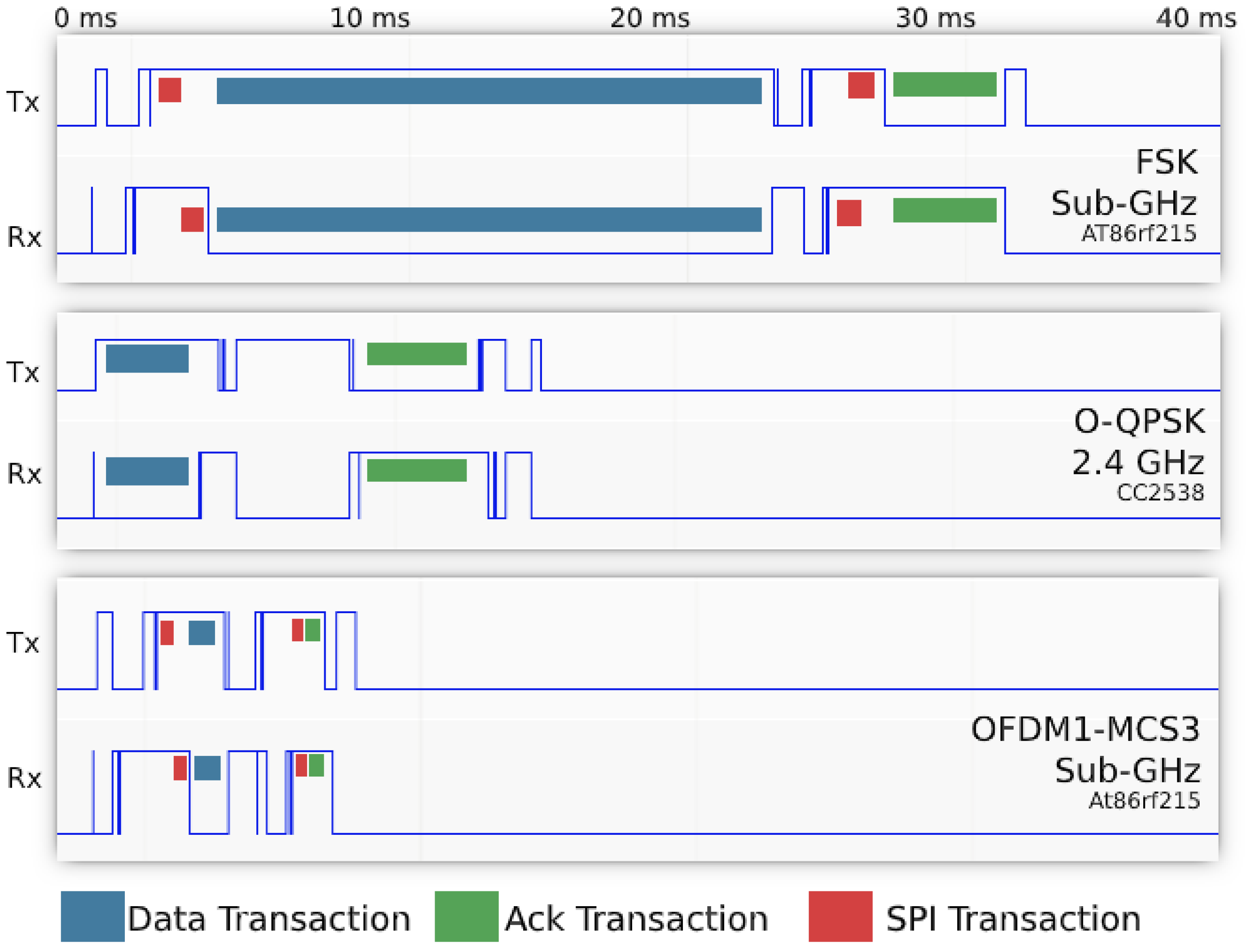
- We augment the OpenWSN reference implementation of 6TiSCH to support the three PHY layers (As an online addition to this paper, these extensions have been merged into the main codebase of OpenWSN at https://github.com/openwsn-berkeley and published under an open-source license.).
- We conduct an experimental performance evaluation campaign of the resulting code on the 42-note OpenTestbed. For each PHY, we measure the network formation time, the end-to-end reliability, the end-to-end latency, the estimated battery lifetime of each node, and the memory footprint of the implementation.
- We highlight the advantages and disadvantages of each PHY layer, specifically:
- -
- Using FSK 868 MHz yields the fastest network formation, the highest end-to-end reliability, and the lowest end-to-end latency, at the cost of a 10× decreased battery lifetime compared to O-QPSK 2.4 GHz.
- -
- Using O-QPSK 2.4 GHz yields the longest battery lifetime, at the cost of the slowest network formation, the lowest end-to-end reliability, and the highest end-to-end latency.
- -
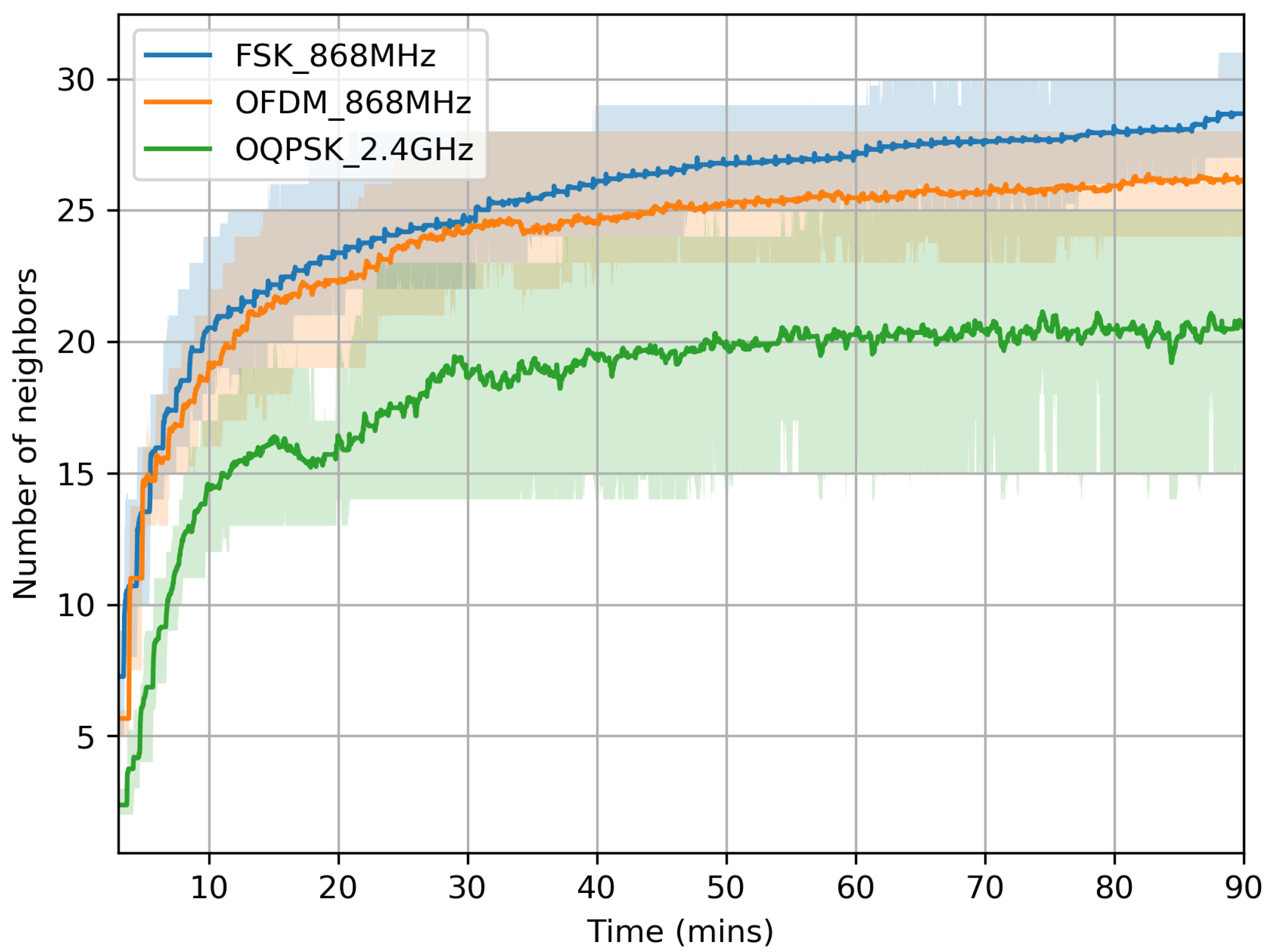
- Using OFDM 868 MHz yields an intermediate network formation time, end-to-end reliability, and end-to-end latency at the cost of a 5× decreased battery lifetime compared to O-QPSK 2.4 GHz. In line with Reference [3], a node using OFDM 868 MHz discovers a number of neighbors close to that of FSK 868 MHz despite having the highest data rate. This is because it is more robust against frequency selective interference than FSK 868 MHz [25] and less vulnerable to Wi-Fi interference than O-QPSK 2.4 GHz [1].
4. A PHY-Layer Agile Extension of OpenWSN
5. Experiment Setup and Methodology
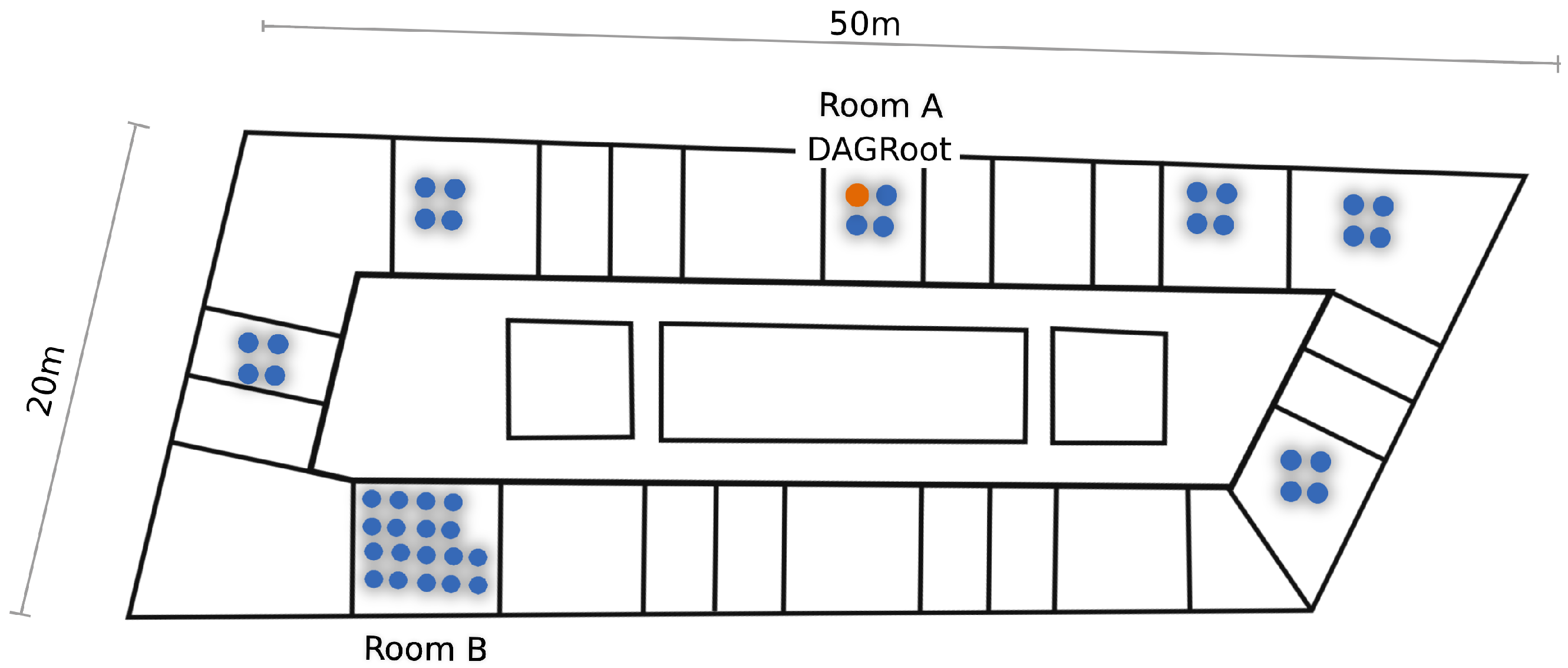
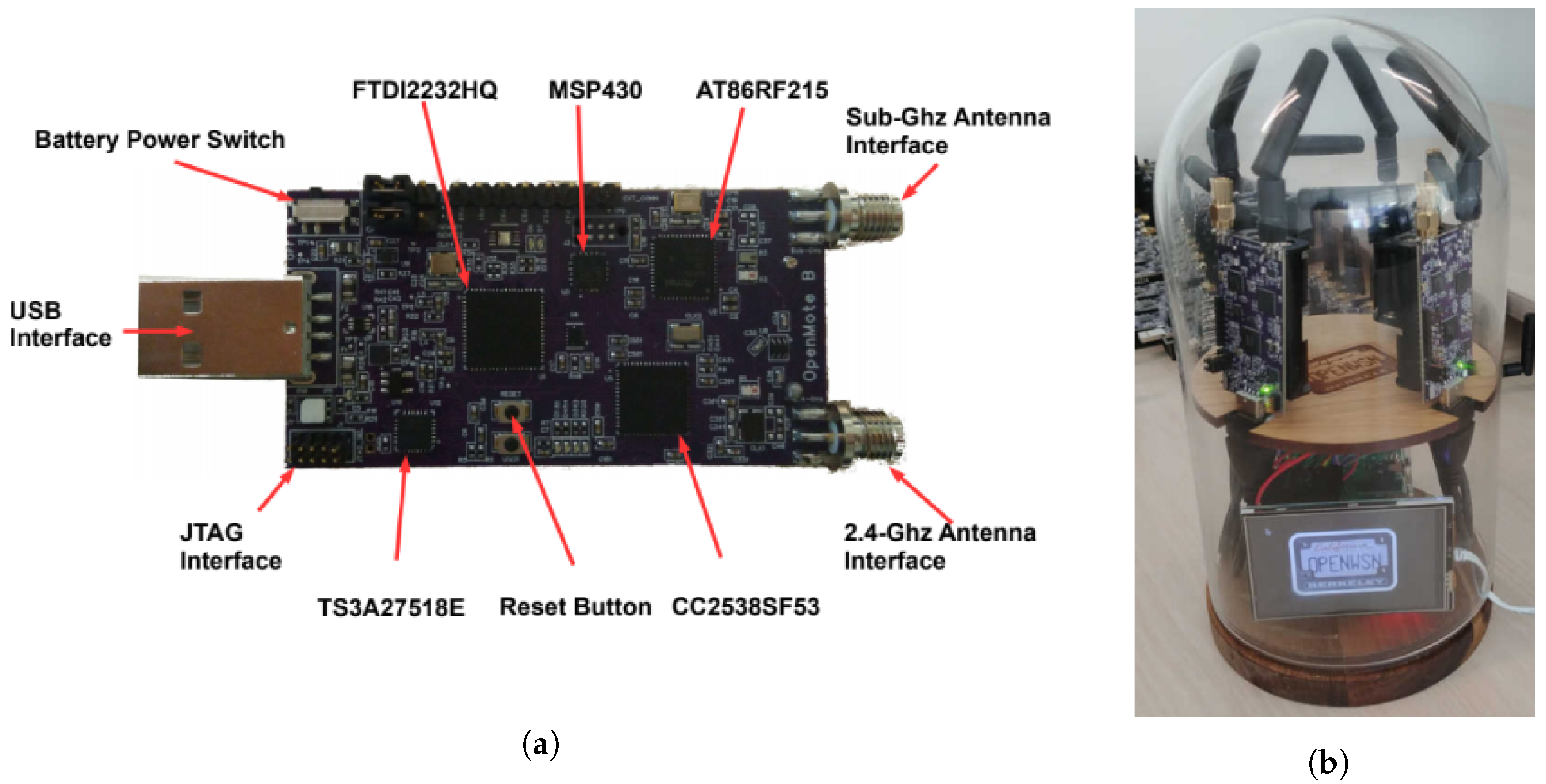
5.1. The OpenTestbed
5.2. Methodology
- a counter, which we use to detect lost data packets,
- the time at which the data packet is generated (Asynchronous Slot Number ASN),
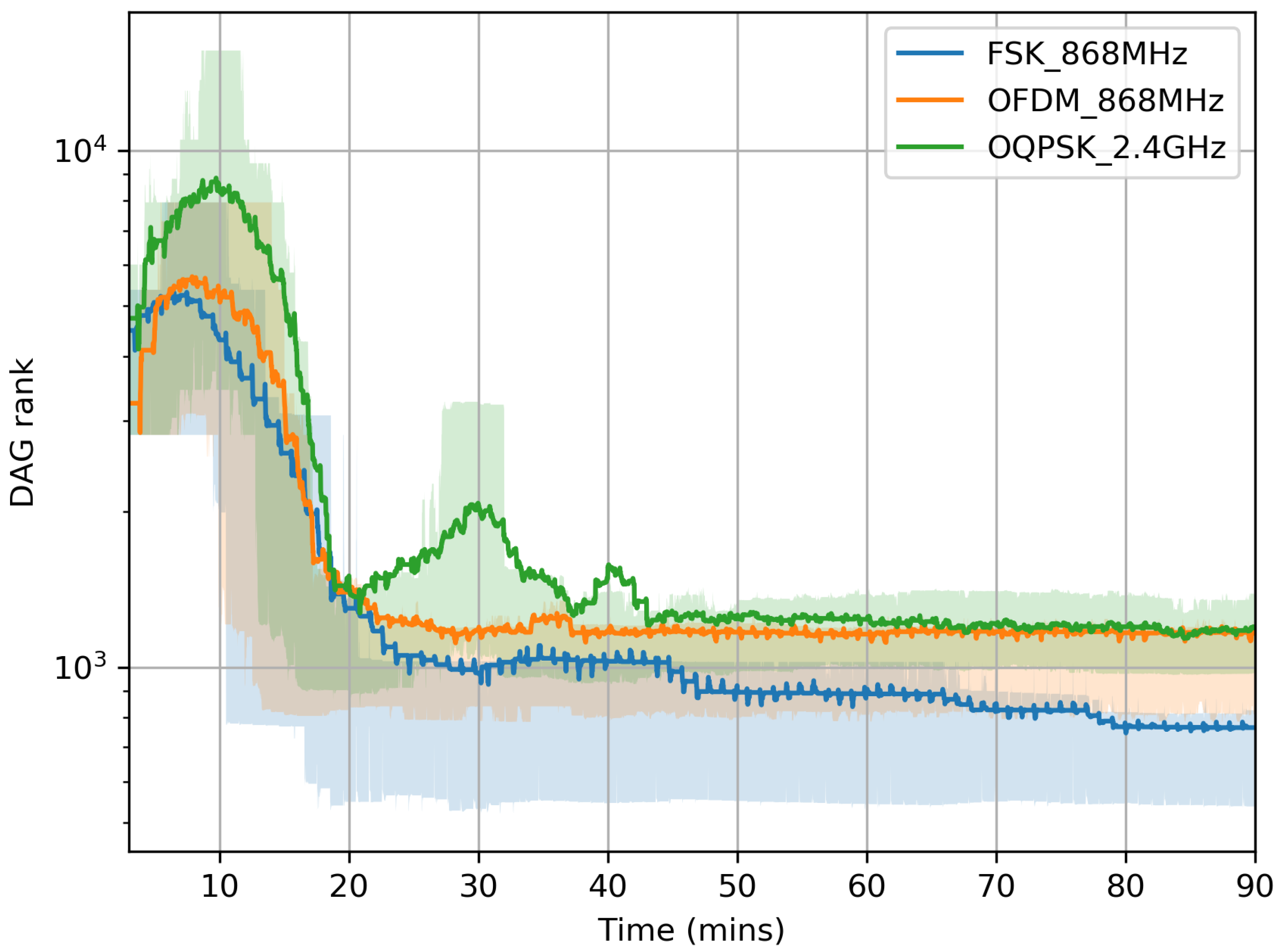
- the DAG rank of the sender,
- the size of the neighbor table of the sender,
- how long the sender’s radio has been on since the previous data packet transmission,
- how long the sender’s radio has been on and transmitting since the previous data packet transmission,
- the amount of time since the previous data packet transmission,
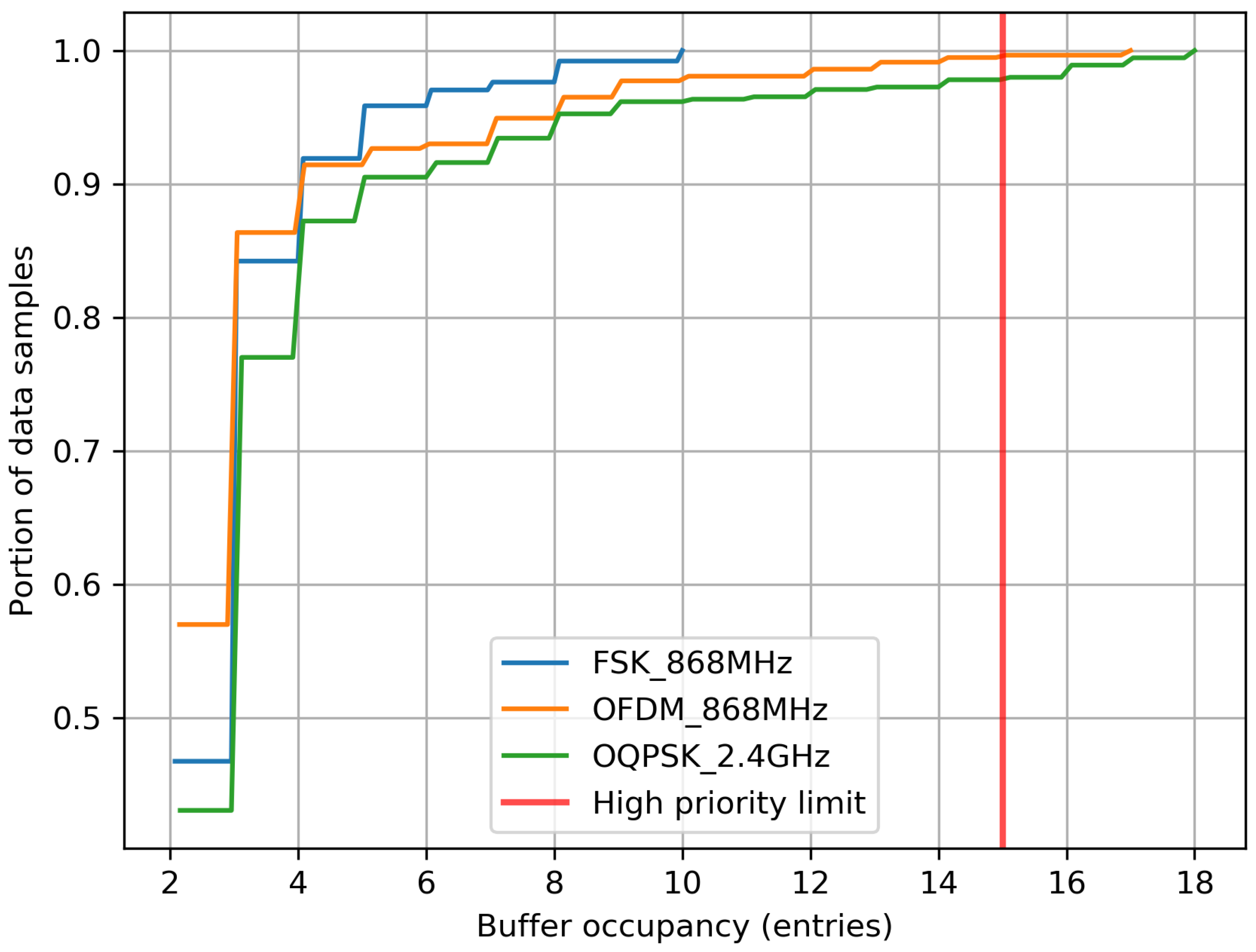
- the maximum and minimum number of packets in the packet buffer since the previous packet.
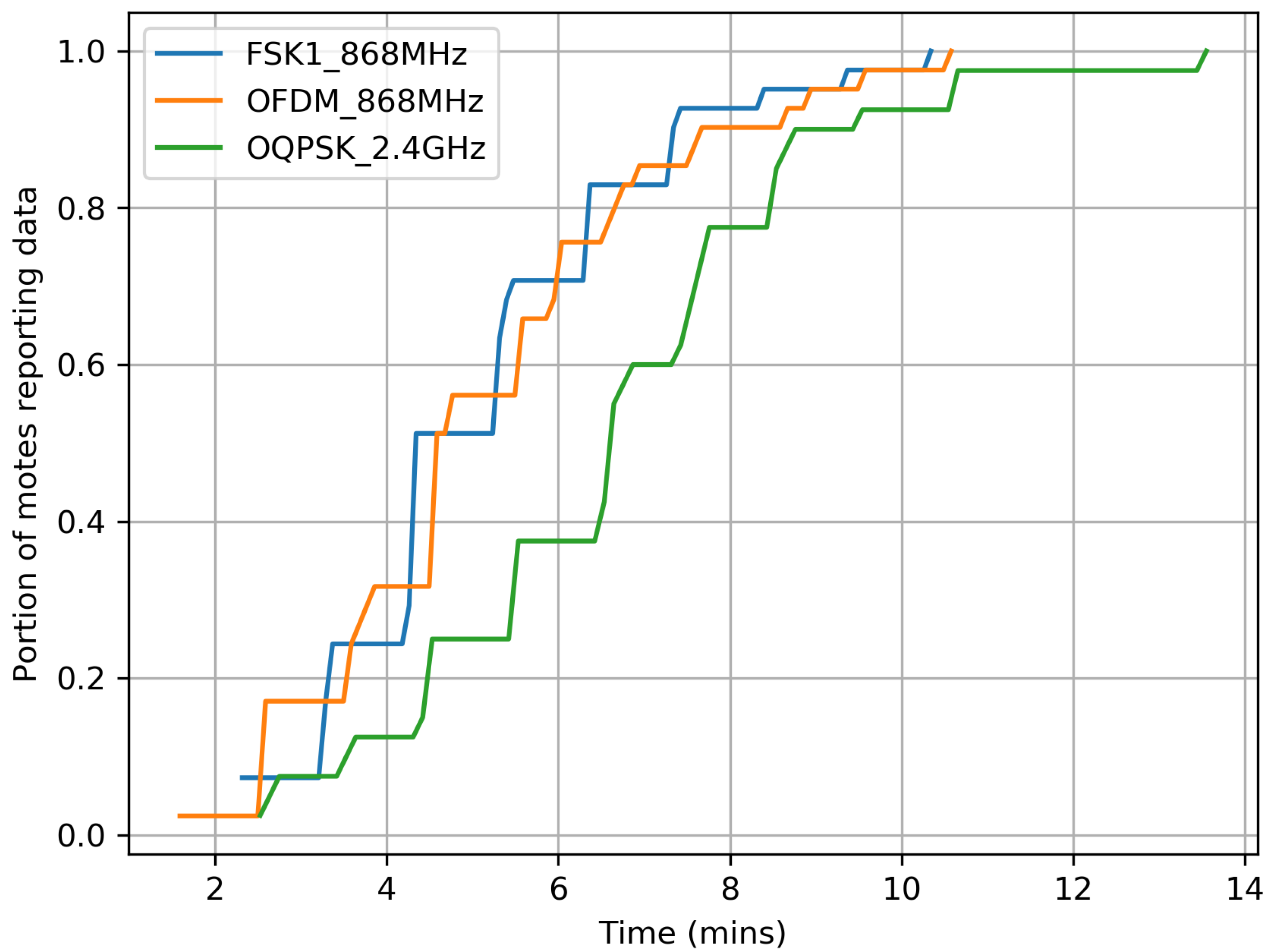
- Network Formation Time: how much time elapses between the moment the root is selected and that root has received at least one packet from each mote.
- End-to-End Reliability: what portion of all packet generated in the network are received by the root.
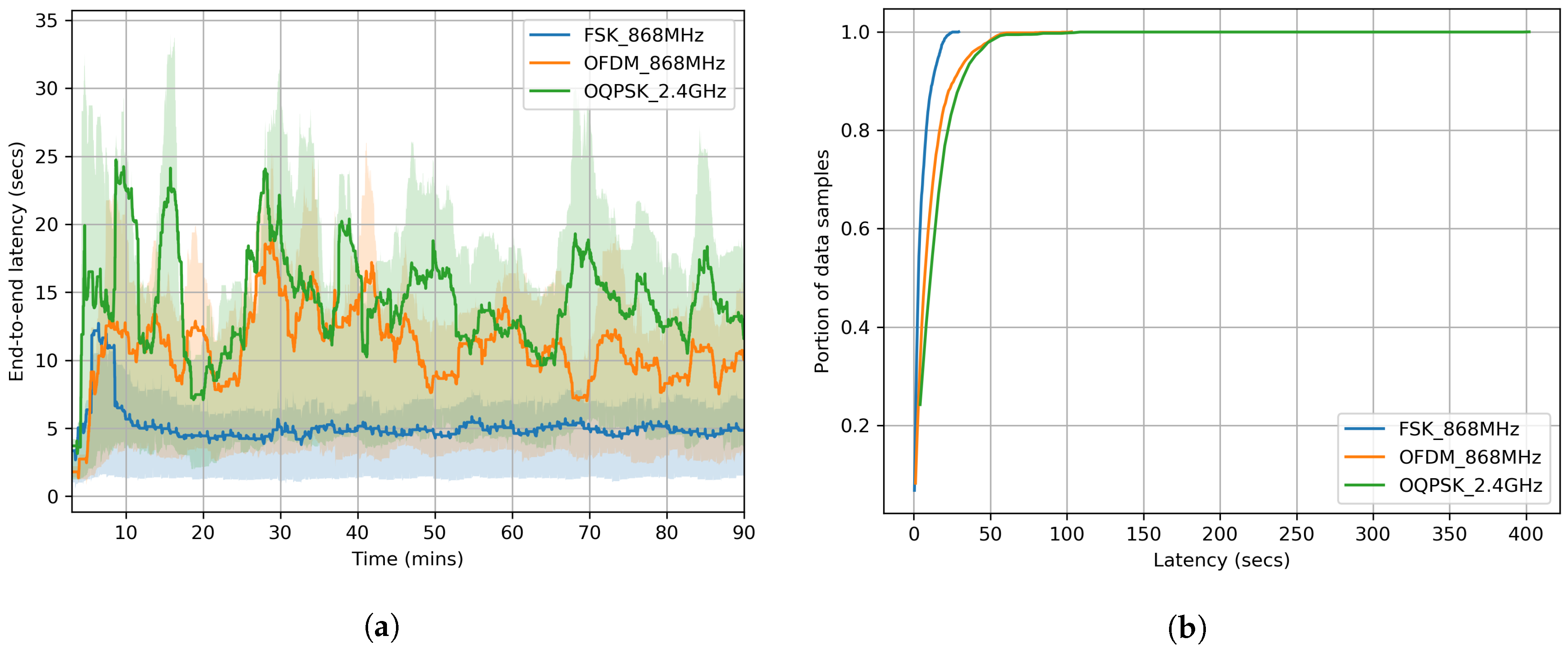
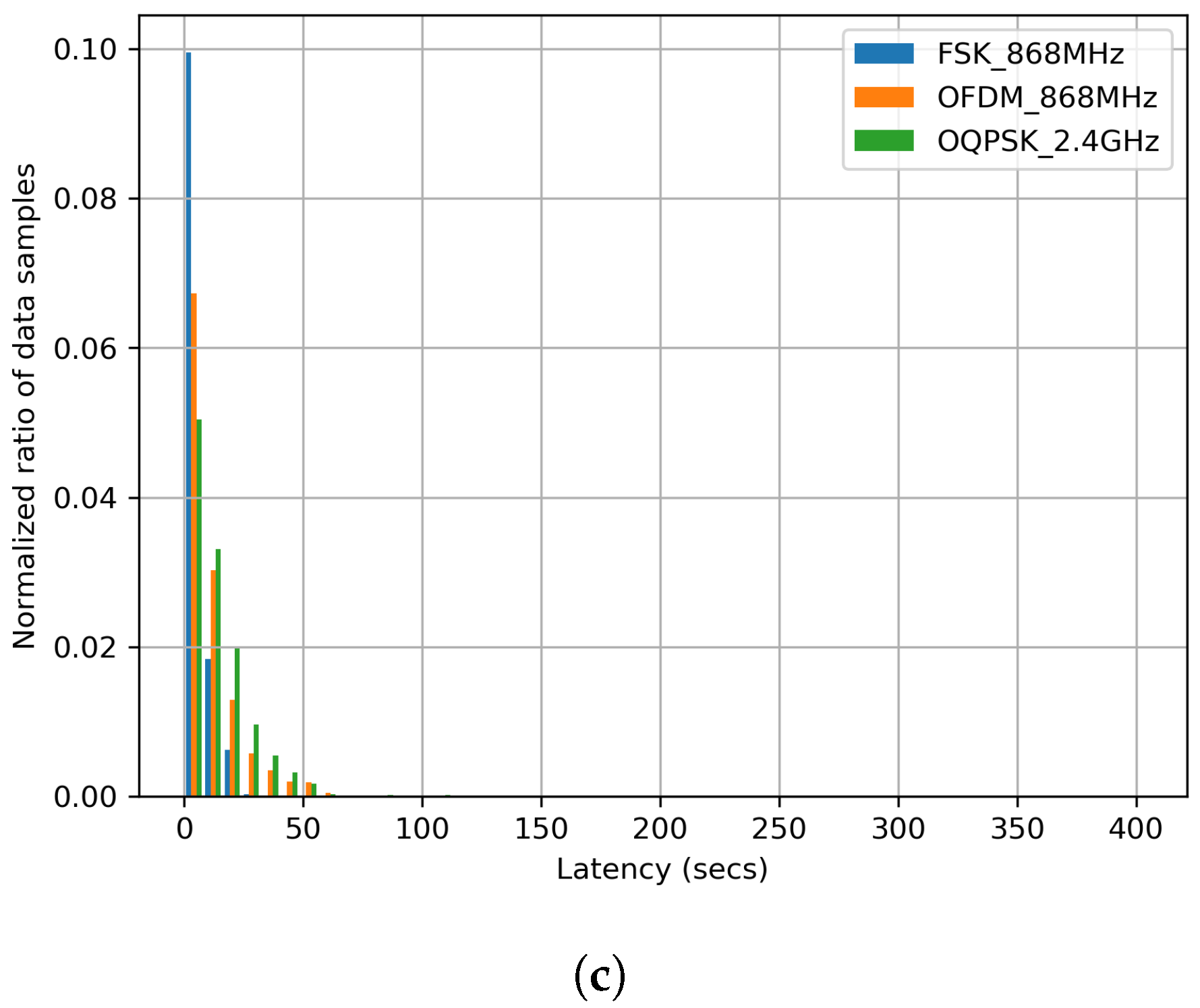
- End-to-End latency: how much time elapses between the generation of the packet at the sender, and reception at the root.
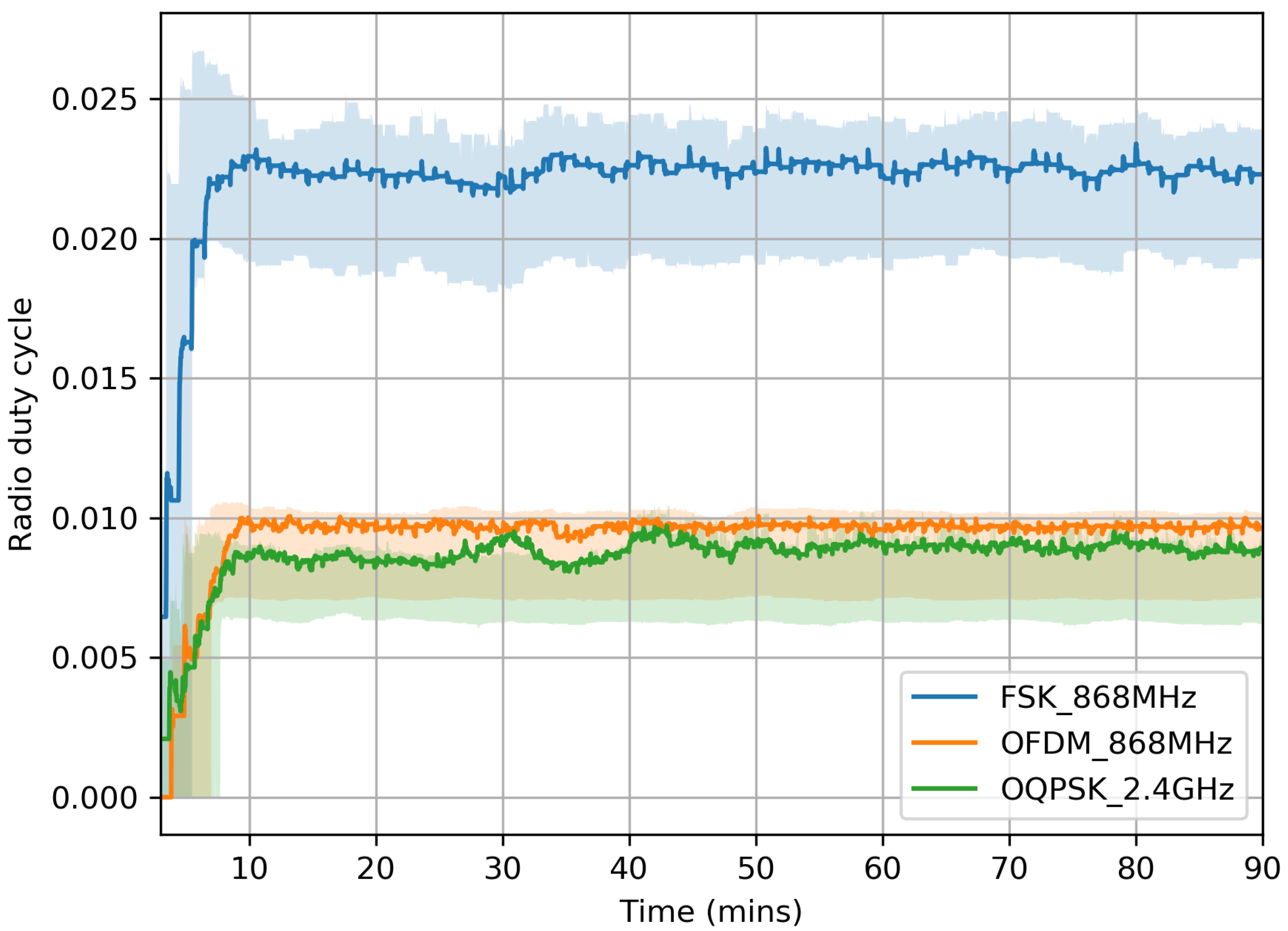
- Radio duty cycle: what portion of the time a node’s radio is on; a good indication for its power consumption.
- Time series. We show the mean and the inter-quartile range of the KPI, with a 3 min sliding window and a 1 s time resolution.
- Cumulative Distribution Function (CDF). We show the cumulative distribution of all data samples at steady state (starting 30 min into the experiment), using 100 bins.
- Probability Distribution Function (PDF). We show the probability distribution of all data samples at steady state using 100 bins. This allows for a more detailed assessment of the distribution of each data set.
6. Experimental Results
6.1. Network Formation Time
6.2. End-to-End Reliability
6.3. End-to-End Latency
6.4. Battery Lifetime
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Muñoz, J.; Riou, E.; Vilajosana, X.; Muhlethaler, P.; Watteyne, T. Overview of IEEE802.15.4g OFDM and Its Applicability to Smart Building Applications. In Proceedings of the 2018 Wireless Days (WD), Dubai, UAE, 3–5 April 2018; pp. 123–130. [Google Scholar]
- Kazmi, A.H.; O’grady, M.J.; Delaney, D.T.; Ruzzelli, A.G.; O’hare, G.M.P. A Review of Wireless-Sensor-Network-Enabled Building Energy Management Systems. ACM Trans. Sens. Netw. 2014, 10, 1–43. [Google Scholar] [CrossRef]
- Muñoz, J.; Chang, T.; Vilajosana, X.; Watteyne, T. Evaluation of IEEE802.15.4g for Environmental Observations. Sensors 2018, 18, 3468. [Google Scholar] [CrossRef] [PubMed]
- Watteyne, T.; Laura Diedrichs, A.; Brun-Laguna, K.; Emilio Chaar, J.; Dujovne, D.; Carlos Taffernaberry, J.; Mercado, G. PEACH: Predicting Frost Events in Peach Orchards Using IoT Technology. EAI Endorsed Trans. Internet Things 2016, 2. Available online: https://hal.archives-ouvertes.fr/hal-02088103/ (accessed on 20 July 2020). [CrossRef]
- Sum, C.S.; Zhou, M.T.; Kojima, F.; Harada, H. Experimental Performance Evaluation of Multihop IEEE 802.15.4/4g/4e Smart Utility Networks in Outdoor Environment. Wirel. Commun. Mob. Comput. 2017, 2017, 1–13. [Google Scholar] [CrossRef]
- Tanaka, Y.; Le, H.; Kobayashi, V.; Lopez, C.; Watteyne, T.; Rady, M. Demo: Blink—Room-Level Localization Using SmartMesh IP. In Proceedings of the International Conference on Embedded Wireless Systems and Networks (EWSN), Lyon, France, 17–19 February 2020. [Google Scholar]
- Fadel, E.; Gungor, V.; Nassef, L.; Akkari, N.; Malik, M.A.; Almasri, S.; Akyildiz, I.F. A Survey on Wireless Sensor Networks for Smart Grid. IEEE Comput. Commun. 2015, 71, 22–33. [Google Scholar] [CrossRef]
- Civerchia, F.; Bocchino, S.; Salvadori, C.; Rossi, E.; Maggiani, L.; Petracca, M. Industrial Internet of Things Monitoring Solution for Advanced Predictive Maintenance Applications. J. Ind. Inf. Integr. 2017, 7, 4–12. [Google Scholar] [CrossRef]
- IEEE Standard for Local and Metropolitan Area Networks–Part 15.4: Low-Rate Wireless Personal Area Networks (LR-WPANs) Amendment 3: Physical Layer (PHY) Specifications for Low-Data-Rate, Wireless, Smart Metering Utility Networks; IEEE: Piscataway, NJ, USA, 2012.
- IEEE Standard for Low-Rate Wireless Networks; IEEE Std 802.15.4-2015 (Revision of IEEE Std 802.15.4-2011); IEEE: Piscataway, NJ, USA, 2016.
- Tuset-Peiró, P.; Vázquez-Gallego, F.; Muñoz, J.; Watteyne, T.; Alonso-Zarate, J.; Vilajosana, X. Experimental Interference Robustness Evaluation of IEEE 802.15.4-2015 OQPSK-DSSS and SUN-OFDM Physical Layers. Sensors 2019, 8, 1045. [Google Scholar] [CrossRef]
- Muñoz, J. km-Scale Industrial Networking. Ph.D. Thesis, Sorbonne University, Paris, France, 2019. Available online: https://hal.inria.fr/tel-02285706 (accessed on 20 July 2020).
- Texas Instruments. Datasheet: CC2538 Powerful Wireless Microcontroller System-On-Chip for 2.4-GHz IEEE 802.15.4, 6LoWPAN, and ZigBee Applications; Texas Instruments: Dallas, TX, USA, 2015; Available online: https://www.ti.com/product/CC2538 (accessed on 20 July 2020).
- Texas Instruments. CC2650 SimpleLink Multistandard Wireless MCU Datasheet, rev. b ed.; Texas Instruments: Dallas, TX, USA, 2016; Available online: https://www.ti.com/product/CC2650 (accessed on 20 July 2020).
- NORDIC Semiconductor. nRF52840 Product Specification, v1.1 ed.; NORDIC Semiconductor: Trondheim, Norway, 2019; Available online: https://infocenter.nordicsemi.com/pdf/nRF52840_PS_v1.1.pdf (accessed on 20 July 2020).
- Watteyne, T.; Handziski, V.; Vilajosana, X.; Duquennoy, S.; Hahm, O.; Baccelli, E.; Wolisz, A. Industrial Wireless IP-based Cyber Physical Systems. Proc. IEEE 2016, 104, 1025–1038. [Google Scholar] [CrossRef]
- Chang, T.; Vucinic, M.; Vilajosana, X.; Duquennoy, S.; Dujovne, D. 6TiSCH Minimal Scheduling Function (MSF). 2020. Available online: https://datatracker.ietf.org/doc/html/draft-ietf-6tisch-msf-17 (accessed on 20 July 2020).
- Muñoz, J.; Vilajosana, X.; Chang, T. Problem Statement for Generalizing 6TiSCH to Multiple PHYs. 2018. Available online: https://datatracker.ietf.org/doc/html/draft-munoz-6tisch-multi-phy-nodes-00 (accessed on 20 July 2020).
- Brachmann, M.; Duquennoy, S.; Tsiftes, N.; Voigt, T. IEEE 802.15.4 TSCH in Sub-GHz: Design Considerations and Multi-Band Support. In Proceedings of the IEEE 44th Conference on Local Computer Networks (LCN), Osnabrueck, Germany, 14–17 October 2019; pp. 42–50. [Google Scholar]
- Tuset, P.; Vilajosana, X.; Watteyne, T. OpenMote+: A Range-Agile Multi-Radio Mote. In Proceedings of the International Conference on Embedded Wireless Systems and Networks (EWSN), Graz, Austria, 15–17 February 2016; pp. 333–334. Available online: https://hal.inria.fr/hal-01239662/ (accessed on 20 July 2020).
- Yang, A.; Sundararajan, A.; Schindler, C.B.; Pister, K.S.J. Analysis of Low Latency TSCH Networks for Physical Event Detection. In Proceedings of the Wireless Communications and Networking Conference Workshops (WCNCW), Barcelona, Spain, 15–18 April 2018; pp. 167–172. [Google Scholar]
- Theoleyre, F.; Papadopoulos, G.Z. Experimental Validation of a Distributed Self-Configured 6TiSCH with Traffic Isolation in Low Power Lossy Networks. In Proceedings of the 19th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems (MSWIM), Malta, Malta, 13–17 November 2016; pp. 102–110. [Google Scholar] [CrossRef]
- Teles Hermeto, R.; Gallais, A.; Theoleyre, F. On the (over)-Reactions and the Stability of a 6TiSCH Network in an Indoor Environment. In Proceedings of the International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems (MSWIM), Montreal, QC, Canada, 2 October–2 November 2018; pp. 83–90. [Google Scholar] [CrossRef]
- Ben Yaala, S.; Theoleyre, F.; Bouallegue, R. Performance Study of Co-Located IEEE 802.15.4-TSCH Networks: Interference and Coexistence. In Proceedings of the Symposium on Computers and Communication (ISCC), Messina, Italy, 27–30 June 2016; pp. 513–518. [Google Scholar]
- Kojima, F.; Sum, C.S.; Zhou, M.T.; Lu, L.; Harada, H. System Evaluation of a Practical IEEE 802.15.4/4e/4g Multi-Physical and Multi-Hop Smart Utility Network. IET Commun. 2015, 9, 665–673. [Google Scholar]
- Kim, A.; Han, J.; Yu, T.; Kim, D.S. Hybrid Wireless Sensor Network for Building Energy Management Systems Based on the 2.4GHz and 400MHz Bands. Inf. Syst. 2015, 48, 320–326. [Google Scholar] [CrossRef]
- Saltzer, J.H.; Reed, D.P.; Clark, D.D. End-to-End Arguments in System Design. Acm Trans. Comput. Syst. 1984, 2, 277–288. [Google Scholar] [CrossRef]
- Vilajosana, X.; Watteyne, T.; Chang, T.; Vucinic, M.; Duquennoy, S.; Thubert, P. IETF 6TiSCH: A Tutorial. IEEE Commun. Surv. Tutor. 2019, 22, 595–615. [Google Scholar] [CrossRef]
- Muñoz, J.; Rincon, F.; Chang, T.; Vilajosana, X.; Vermeulen, B.; Walcarius, T.; van de Meerssche, W.; Watteyne, T. OpenTestBed: Poor Man’s IoT Testbed. In Proceedings of the IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Paris, France, 29 April–2 May 2019; pp. 467–471. [Google Scholar]
- Vucinic, M.; Chang, T.; Skrbic, B.; Kocan, E.; Pejanovic-Djurisic, M.; Watteyne, T. Key Performance Indicators of the Reference 6TiSCH Implementation in Internet-of-Things Scenarios. IEEE Access 2020, 8, 79147–79157. [Google Scholar] [CrossRef]
- Winter, T.; Thubert, P.; Brandt, A.; Hui, J.; Kelsey, R.; Levis, P.; Pister, K.; Struik, R.; Vasseur, J.; Alexander, R. RPL: IPv6 Routing Protocol for Low-Power and Lossy Networks. 2012. Available online: https://www.hjp.at/doc/rfc/rfc6550.html (accessed on 20 July 2020).
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia, J.; Watteyne, T. Understanding the Limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radio Chip | Data Rate | TX Power | Sensitivity | Link Budget | |
|---|---|---|---|---|---|
| FSK 868 MHz | AT86RF215 | 50 kbps | +14.5 dBm | −114 dBm | 128.5 dB |
| OFDM 868 MHz | AT86RF215 | 800 kbps | +10.0 dBm | −104 dBm | 114.0 dB |
| O-QPSK 2.4 GHz | CC2538 | 250 kbps | +07.0 dBm | −97 dBm | 104.0 dB |
| Parameter | Value |
|---|---|
| Application traffic period | 60 s |
| RPL DIO period | 10 s |
| RPL DAO period | 60 s |
| neighbor table size | 45 |
| packet queue size | 15 |
| slotframe length | 41 |
| timeslot duration | 40 ms |
| EB probability | 10% |
| Number of radio channels | 16 |
| New neighbor RSSI * threshold | −80 dBm |
| Max num. re-transmissions | 15 |
| Min | Average | Median | Max | StDev | |
|---|---|---|---|---|---|
| FSK 868 MHz | 100.0% | 100.0% | 100.0% | 100.0% | 0.0% |
| OFDM 868 MHz | 93.8% | 99.8% | 100.0% | 100.0% | 0.9% |
| O-QPSK 2.4 GHz | 73.3% | 98.1% | 100.0% | 100.0% | 6.0% |
| FSK 868 MHz | OFDM 868 MHz | O-QPSK 2.4 GHz | |
|---|---|---|---|
| DC | 2.100% | 0.750% | 0.650% |
| 0.250% | 0.038% | 0.050% | |
| 1.850% | 0.713% | 0.600% | |
| 62 mA | 62 mA | 24 mA | |
| 28 mA | 28 mA | 20 mA | |
| Supply voltage | 2.5 V | 2.5 V | 3.0 V |
| energy per day | 0.0141 Wh | 0.0033 Wh | 0.0015 Wh |
| battery lifetime | 1.6 years | 6.9 years | 15.1 years |
| Network Formation | End-to-End Reliability | End-to-End Latency | Battery Lifetime | |
|---|---|---|---|---|
| (Section 6.1) | (Section 6.2) | (Section 6.3) | (Section 6.4) | |
| FSK 868 MHz | 7 min | 100.00% | 10 s | 1.6 years |
| OFDM 868 MHz | 9 min | 99.84% | 25 s | 6.9 years |
| O-QPSK 2.4 GHz | 11 min | 98.08% | 35 s | 15.1 years |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rady, M.; Lampin, Q.; Barthel, D.; Watteyne, T. No Free Lunch—Characterizing the Performance of 6TiSCH When Using Different Physical Layers. Sensors 2020, 20, 4989. https://doi.org/10.3390/s20174989
Rady M, Lampin Q, Barthel D, Watteyne T. No Free Lunch—Characterizing the Performance of 6TiSCH When Using Different Physical Layers. Sensors. 2020; 20(17):4989. https://doi.org/10.3390/s20174989
Chicago/Turabian StyleRady, Mina, Quentin Lampin, Dominique Barthel, and Thomas Watteyne. 2020. "No Free Lunch—Characterizing the Performance of 6TiSCH When Using Different Physical Layers" Sensors 20, no. 17: 4989. https://doi.org/10.3390/s20174989
APA StyleRady, M., Lampin, Q., Barthel, D., & Watteyne, T. (2020). No Free Lunch—Characterizing the Performance of 6TiSCH When Using Different Physical Layers. Sensors, 20(17), 4989. https://doi.org/10.3390/s20174989