A Driving and Control Scheme of High Power Piezoelectric Systems over a Wide Operating Range


Abstract
1. Introduction
2. Electrical Architecture
2.1. Equivalent Models
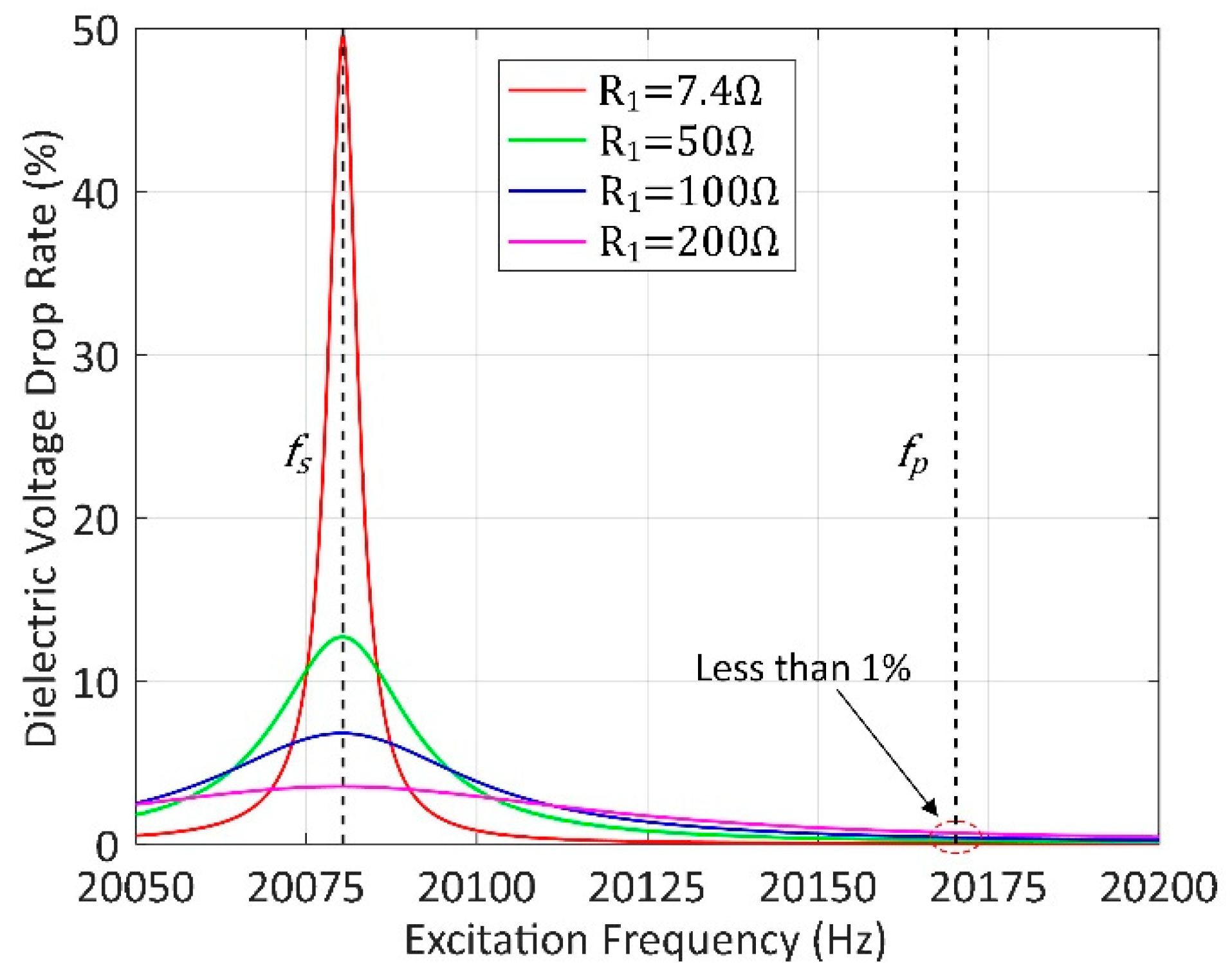
2.2. Impedance Characteristics Analysis
3. Proposed Driving Scheme
3.1. Electrical Architecture
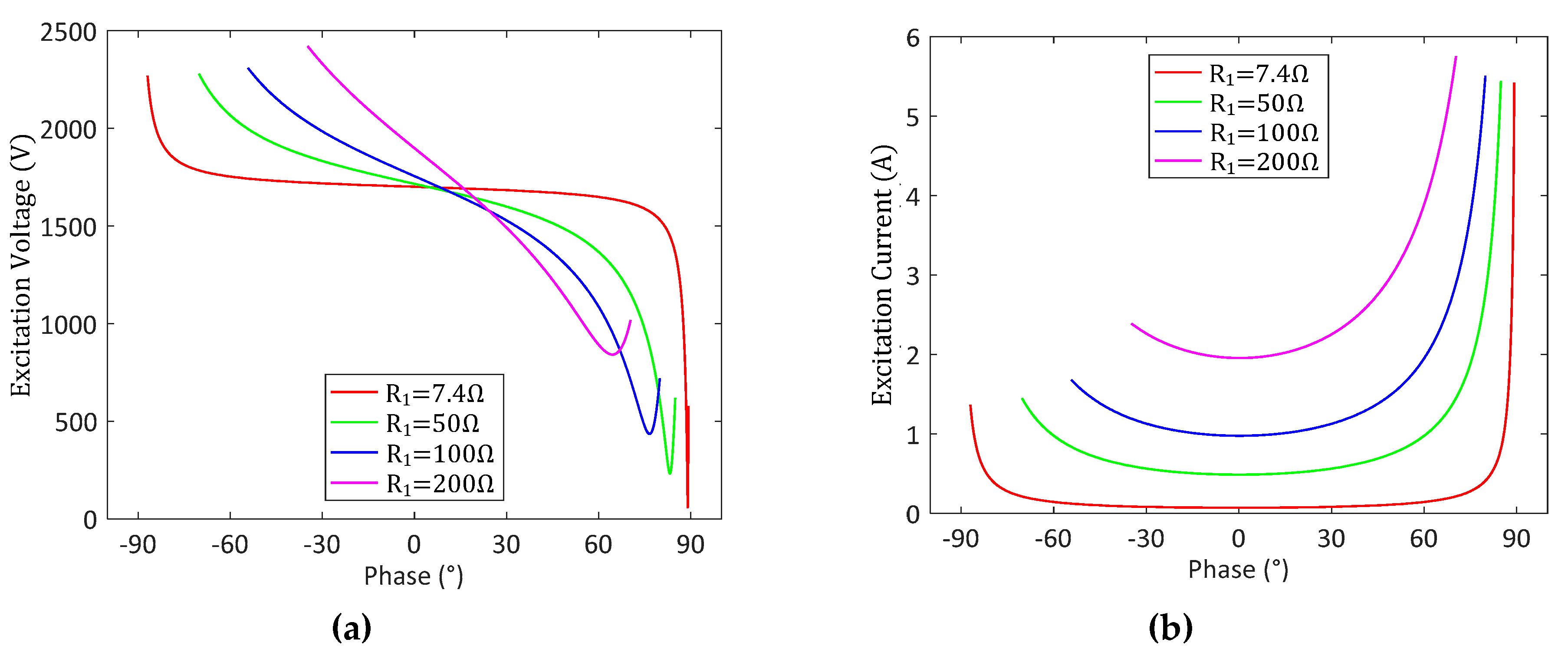
3.2. Electrical Properties
4. Detection and Control
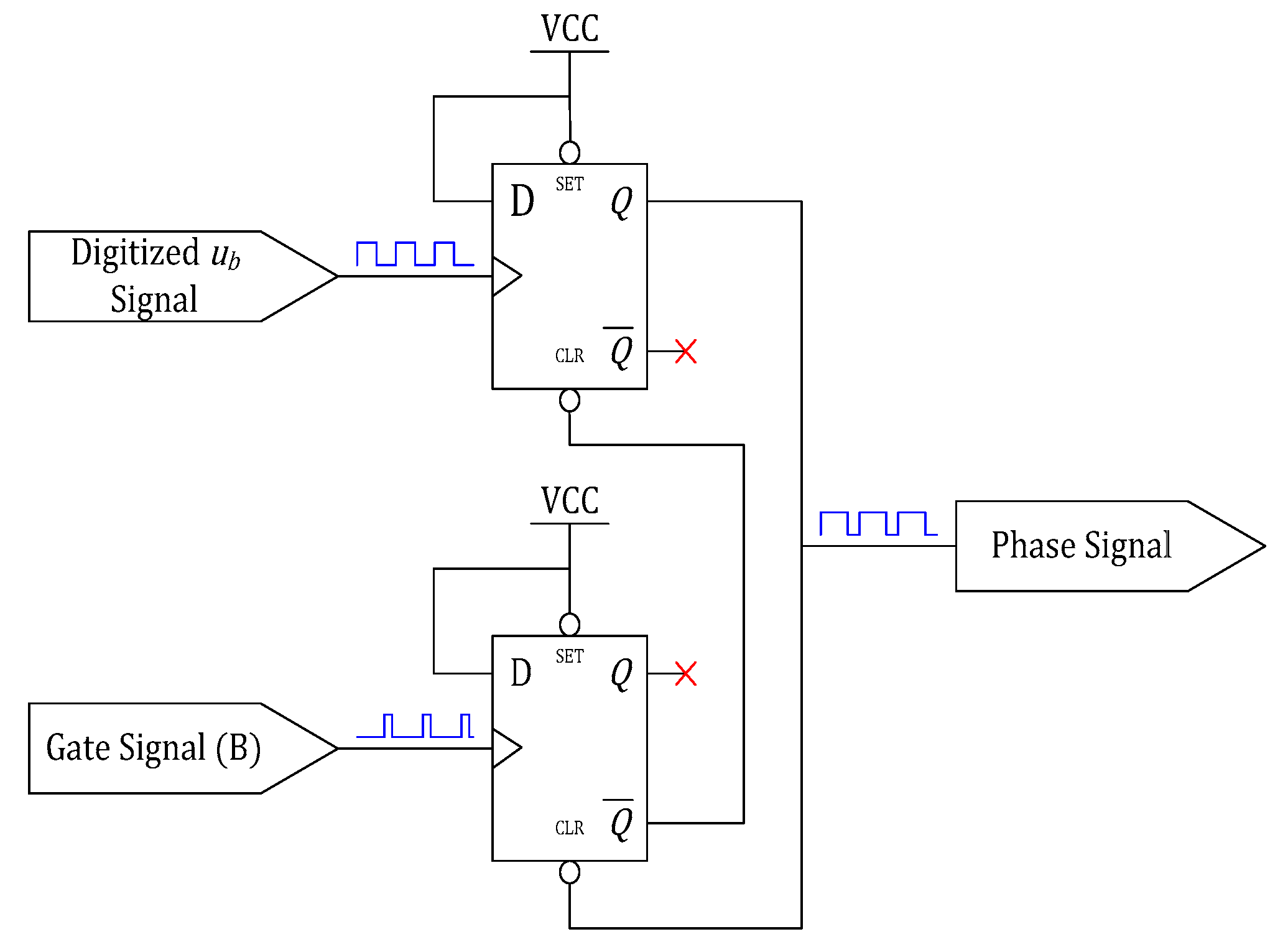
4.1. Pulse Based Phase Detector
4.2. Control Realization
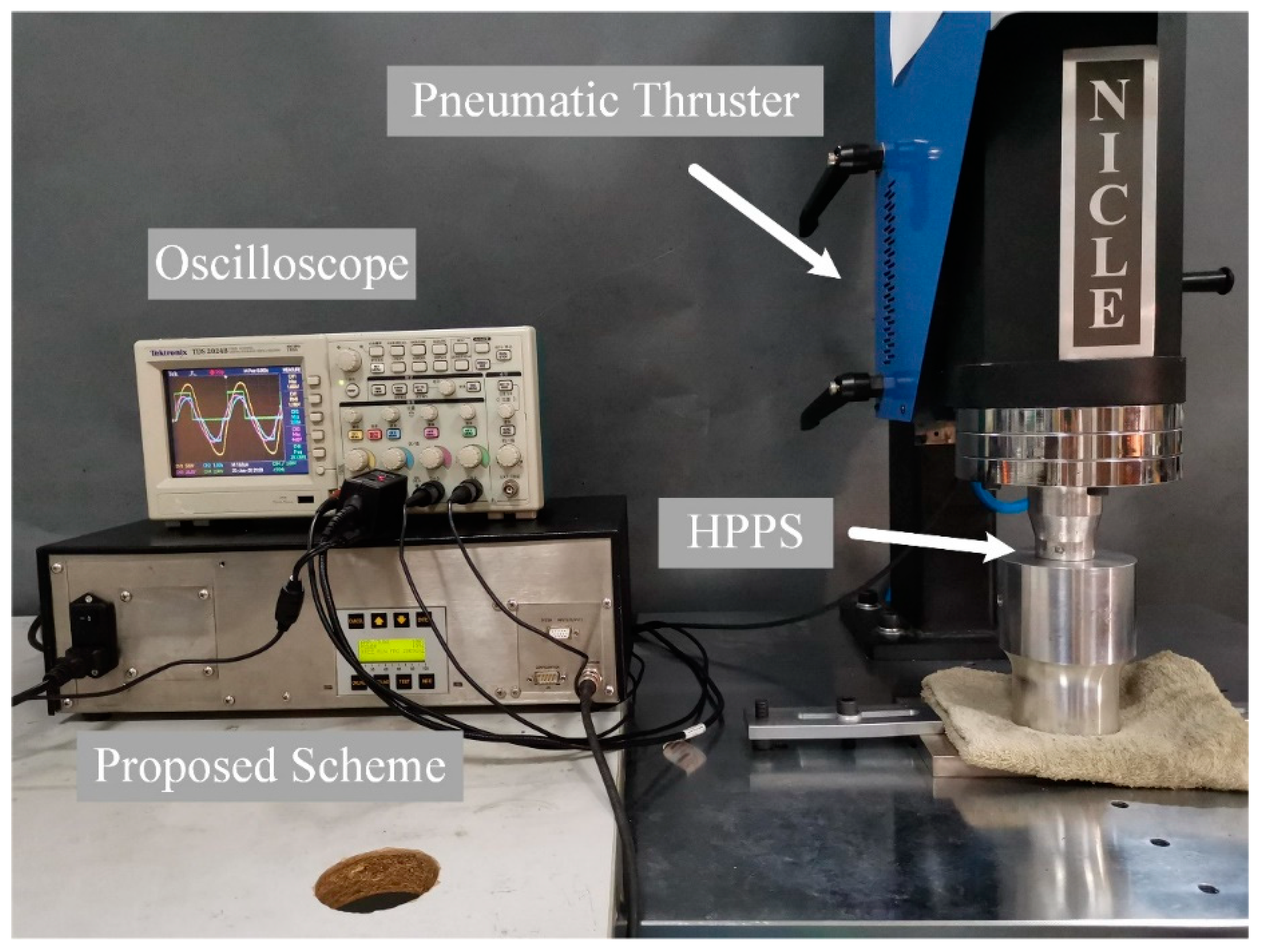
5. Experimental Results
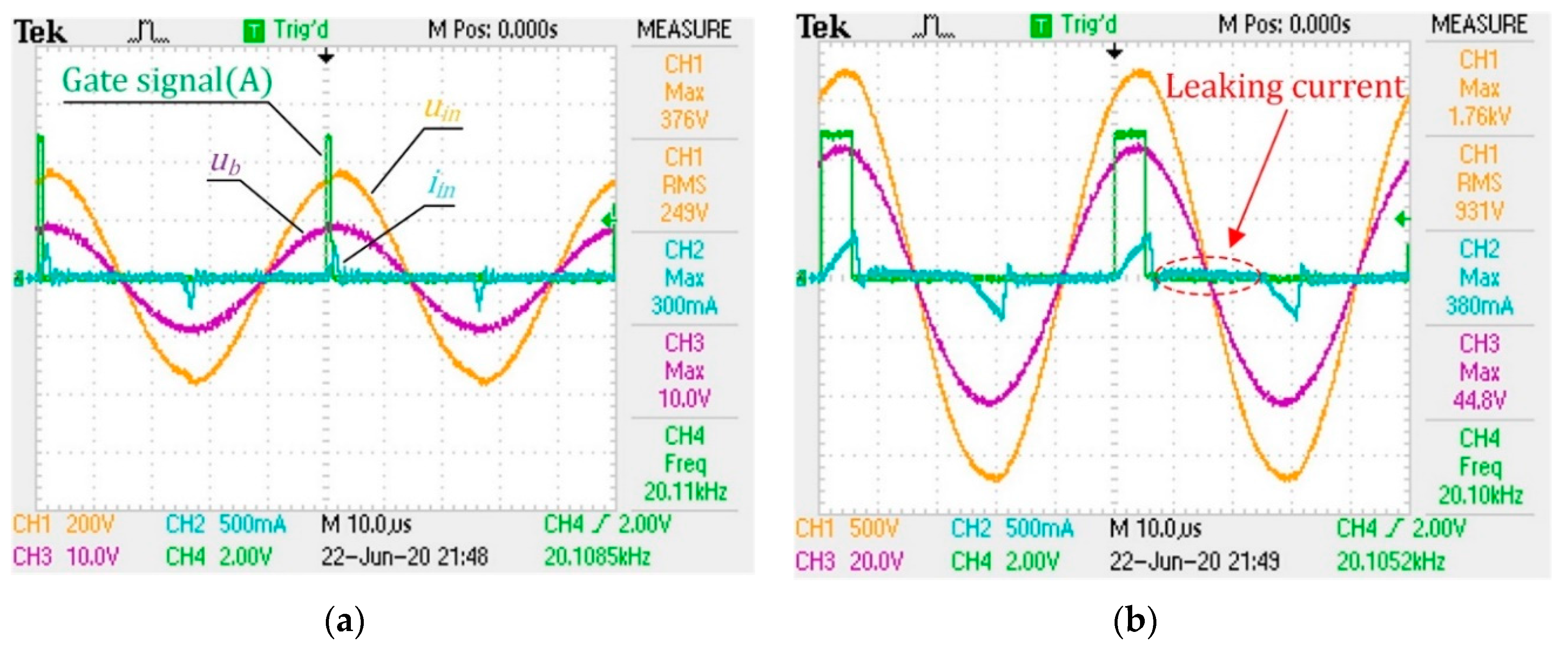
5.1. Frequency Tracking Verification
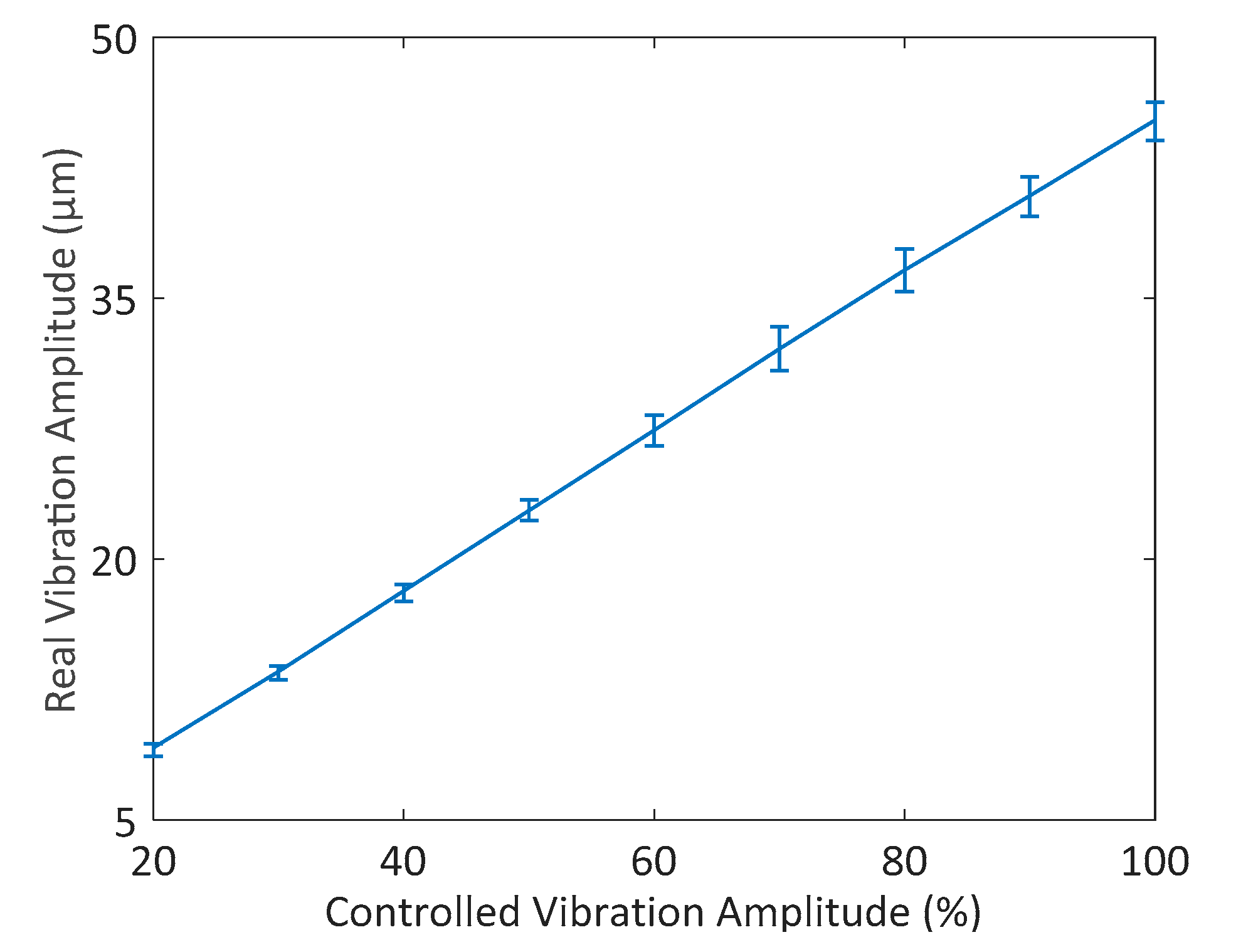
5.2. Vibration Control Verification
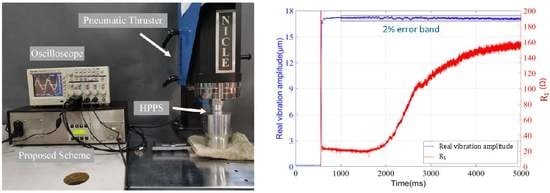
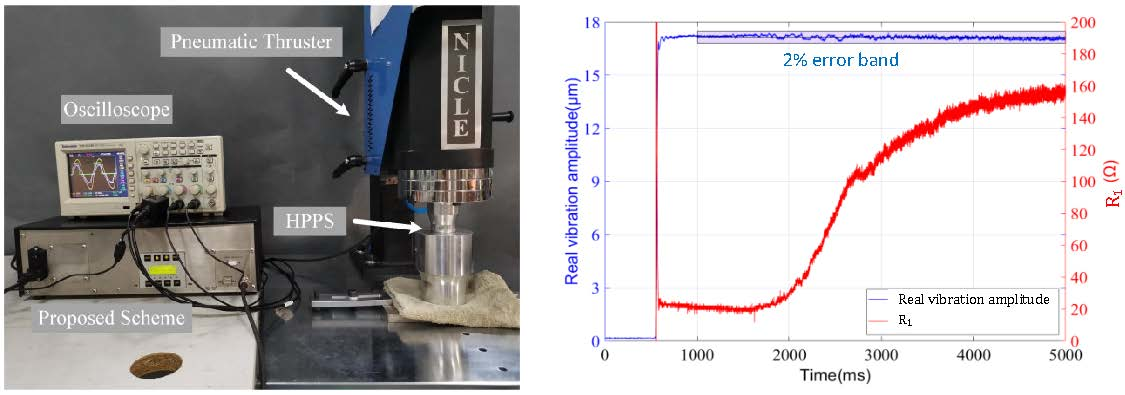
5.3. Vibration Stability under Variable Load
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, J.D.; Jiang, J.J.; Duan, F.J.; Zhang, F.M.; Liu, W.; Qu, X.H. A Novel Fast Resonance Frequency Tracking Method Based on the Admittance Circle for Ultrasonic Transducers. IEEE Trans. Ind. Electron. 2020, 67, 6864–6873. [Google Scholar] [CrossRef]
- Rani, M.R.; Prakasan, K.; Rudramoorthy, R. Studies on Thermo-Elastic Heating of Horns used in Ultrasonic Plastic Welding. Ultrasonics 2015, 55, 123–132. [Google Scholar] [CrossRef] [PubMed]
- Jiang, X.; Zhang, X.; Zhu, X.; Sui, H.; Zhang, D. Study of Phase Shift Control in High-Speed Ultrasonic Vibration Cutting. IEEE Trans. Ind. Electron. 2018, 65, 2467–2474. [Google Scholar] [CrossRef]
- An, D.; Yang, M.; Zhuang, X.; Yang, T.; Meng, F.; Dong, Z. Dual Traveling Wave Rotary Ultrasonic Motor with Single Active Vibrator. Appl. Phys. Lett. 2017, 110, 143507. [Google Scholar] [CrossRef]
- Ghenna, S.; Giraud, F.; Giraud-Audine, C.; Amberg, M. Vector Control of Piezoelectric Transducers and Ultrasonic Actuators. IEEE Trans. Ind. Electron. 2018, 65, 4880–4888. [Google Scholar] [CrossRef]
- Nazemi, H.; Balasingam, J.A.; Swaminathan, S.; Ambrose, K.; Nathani, M.U.; Ahmadi, T.; Lopez, Y.B.; Emadi, A. Mass Sensors Based on Capacitive and Piezoelectric Micromachined Ultrasonic Transducers-CMUT and PMUT. Sensors 2020, 20, 2010. [Google Scholar] [CrossRef] [PubMed]
- Fiorillo, A.S.; Pullano, S.A.; Bianco, M.G.; Critello, C.D. Ultrasonic Transducers Shaped in Archimedean and Fibonacci Spiral: A Comparison. Sensors 2020, 20, 2800. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, T.H.L.; Park, S. Multi-Angle Liquid Flow Measurement Using Ultrasonic Linear Array Transducer. Sensors 2020, 20, 388. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Colli-Menchi, A.I.; Gilbert, J.; Friedrichs, D.A.; Malang, K.; Sánchez-Sinencio, E. An Automatic Resonance Tracking Scheme With Maximum Power Transfer for Piezoelectric Transducers. IEEE Trans. Ind. Electron. 2015, 62, 7136–7145. [Google Scholar] [CrossRef]
- Umeda, M.; Nakamura, K.; Ueha, S. The Measurement of High-Power Characteristics for a Piezoelectric Transducer Based on the Electrical Transient Response. Jpn. J. Appl. Phys. 1998, 37, 5322–5325. [Google Scholar] [CrossRef]
- Uchino, K.; Zheng, J.H.; Chen, Y.H.; Du, X.H.; Ryu, J.; Gao, Y.; Ural, S.; Priya, S.; Hirose, S. Loss mechanisms and high power piezoelectrics. J. Mater. Sci. 2006, 41, 217–228. [Google Scholar] [CrossRef]
- Yang, T.; Zhu, Y.; Li, S.; An, D.; Yang, M.; Cao, W. Dielectric loss and thermal effect in high power piezoelectric systems. Sens. Actuators A. Phys. 2019, 303, 111724. [Google Scholar] [CrossRef]
- Wu, H.; Yang, M.; Yang, T.; An, D. Development of web-based communication for ultrasonic power supply. In Proceeding of the 2nd International Conference on Communication and Information, Wuhan, China, 7–9 November 2017. [Google Scholar]
- Zang, Y.D. Sandwich Piezoelectric Transducers and their Applications, Chinese ed.; Science Press: Beijing, China, 2006. [Google Scholar]
- Zhu, Y.; Yang, T.; Fang, Z.; Shiyang, L.; Cunyue, L.; Yang, M. Contact modeling for control design of traveling wave ultrasonic motors. Sens. Actuators A Phys. 2020, 310, 112037. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, F.; Zhang, D.; Wang, L.; Hou, Y.; Xi, T. A new automatic resonance frequency tracking method for piezoelectric ultrasonic transducers used in thermosonic wire bonding. Sens. Actuator A-Phys. 2015, 235, 140–150. [Google Scholar] [CrossRef]
- Zhao, C.S. Ultrasonic Motors Technologies and Application, Chinese ed.; Science press: Beijing, China, 2007. [Google Scholar]
- Di, S.; Fan, W.; Li, H. Parallel resonant frequency tracking based on the static capacitance online measuring for a piezoelectric transducer. Sens. Actuator A-Phys. 2018, 270, 18–24. [Google Scholar] [CrossRef]
- Fang, Z.; Yang, T.; Zhu, Y.; Li, S.; Yang, M. Velocity Control of Traveling-Wave Ultrasonic Motors Based on Stator Vibration Amplitude. Sensors 2019, 19, 5326. [Google Scholar] [CrossRef] [PubMed]
- Butterworth, S. On Electrically-maintained Vibrations. Proc. Phys. Soc. Lond. 1914, 27, 410–424. [Google Scholar] [CrossRef]
- Dyke, K.S.V. The Piezo-Electric Resonator and Its Equivalent Network. Proc. Inst. Radio Eng. 1928, 16, 742–764. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | |||||
|---|---|---|---|---|---|
| value | 7.26 | 18.93 | 0.1696 | 370.4 | 7.40~500 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, T.; Zhu, Y.; Fang, Z.; Wu, H.; Jiang, W.; Yang, M. A Driving and Control Scheme of High Power Piezoelectric Systems over a Wide Operating Range. Sensors 2020, 20, 4401. https://doi.org/10.3390/s20164401
Yang T, Zhu Y, Fang Z, Wu H, Jiang W, Yang M. A Driving and Control Scheme of High Power Piezoelectric Systems over a Wide Operating Range. Sensors. 2020; 20(16):4401. https://doi.org/10.3390/s20164401
Chicago/Turabian StyleYang, Tianyue, Yuanfei Zhu, Zhiwei Fang, Haoyu Wu, Wanlu Jiang, and Ming Yang. 2020. "A Driving and Control Scheme of High Power Piezoelectric Systems over a Wide Operating Range" Sensors 20, no. 16: 4401. https://doi.org/10.3390/s20164401
APA StyleYang, T., Zhu, Y., Fang, Z., Wu, H., Jiang, W., & Yang, M. (2020). A Driving and Control Scheme of High Power Piezoelectric Systems over a Wide Operating Range. Sensors, 20(16), 4401. https://doi.org/10.3390/s20164401