Design of a Large-Scale Piezoelectric Transducer Network Layer and Its Reliability Verification for Space Structures



Abstract
1. Introduction
2. Development of the Large-Scale PZT Network Layer
2.1. Large-Scale Lightweight Network Design Method
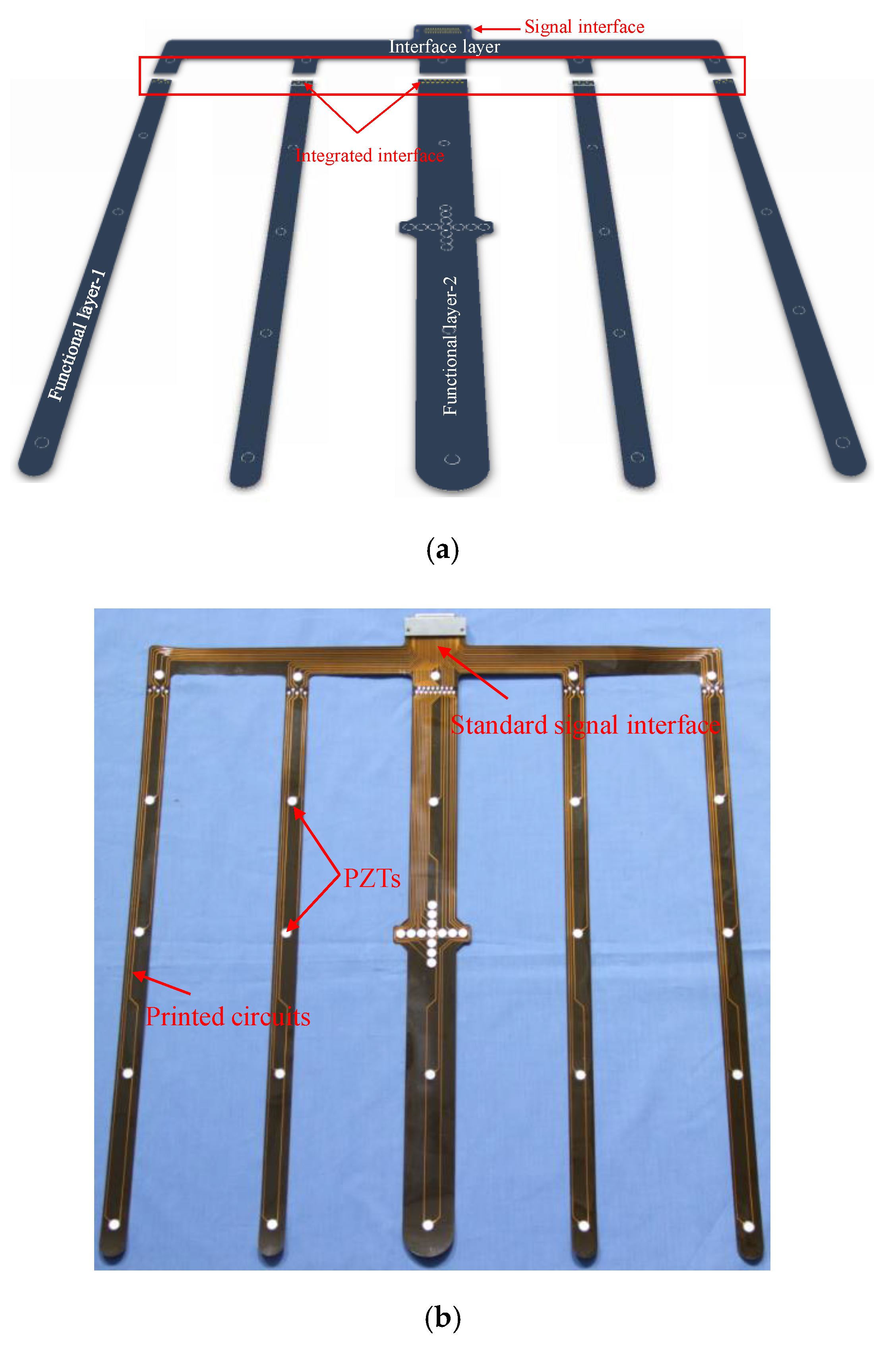
2.2. Network Splitting-Recombination Method
2.3. Main Characteristics of The Developed LPNL
3. Reliability Verification under Extreme Environmental Conditions
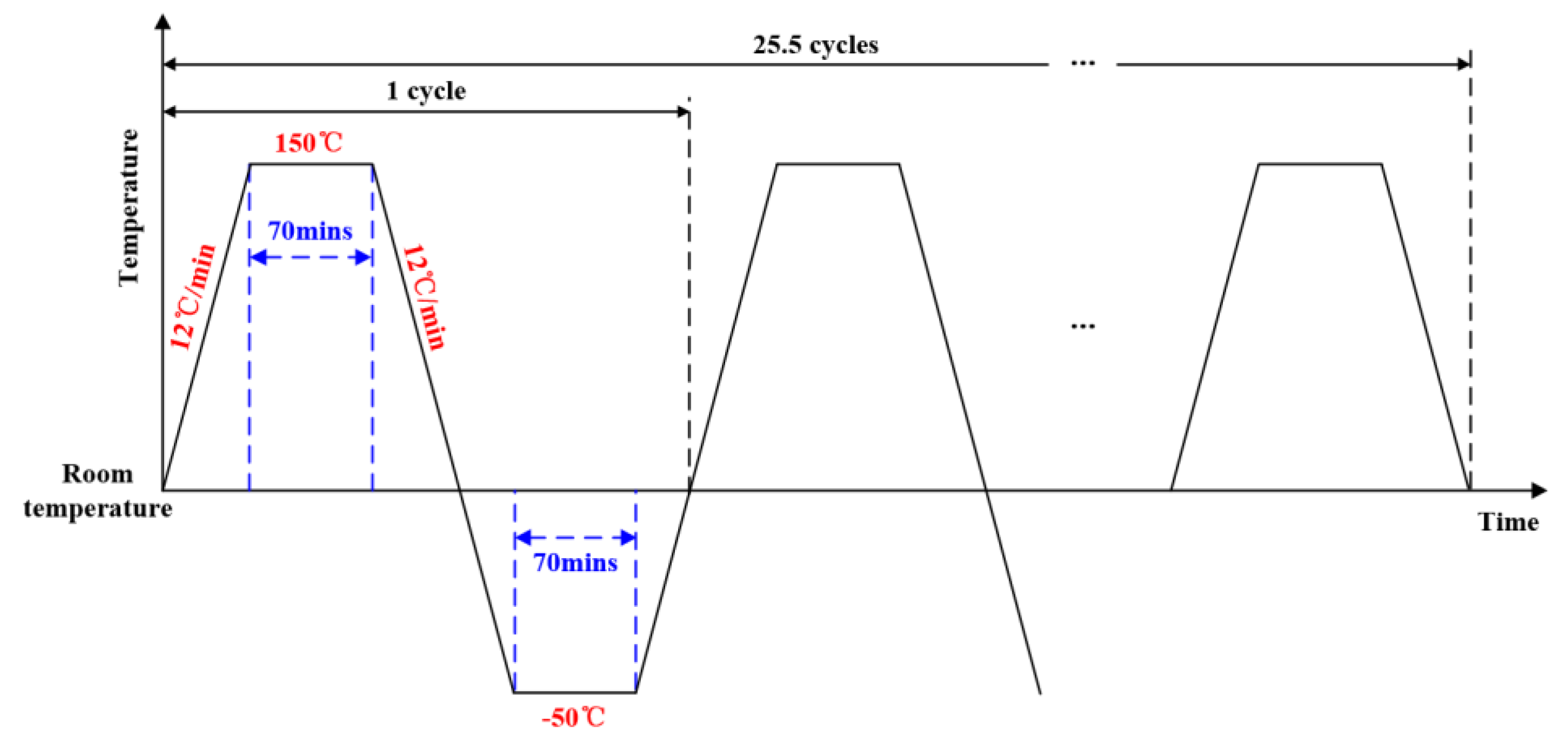
3.1. Temperature Tests
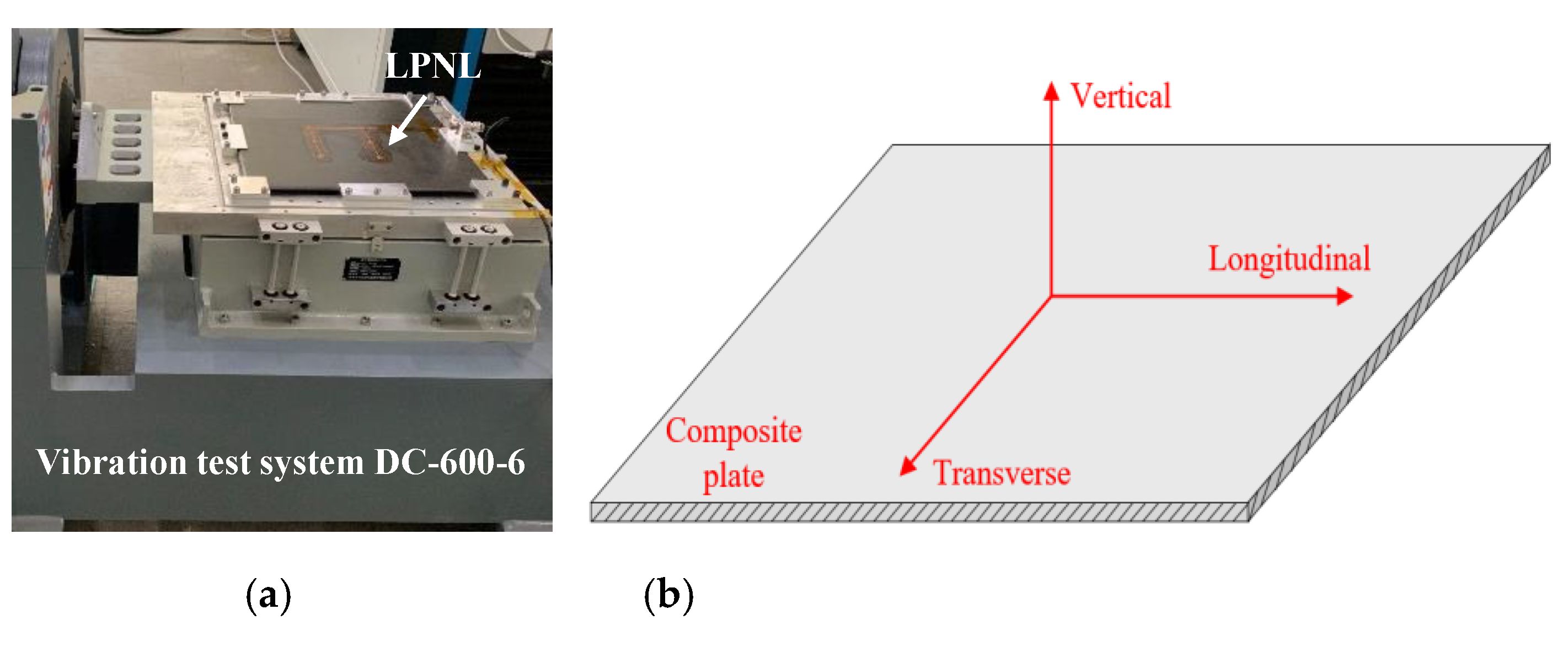
3.2. Vibration Tests
3.3. Impact Tests
3.4. Overload Tests
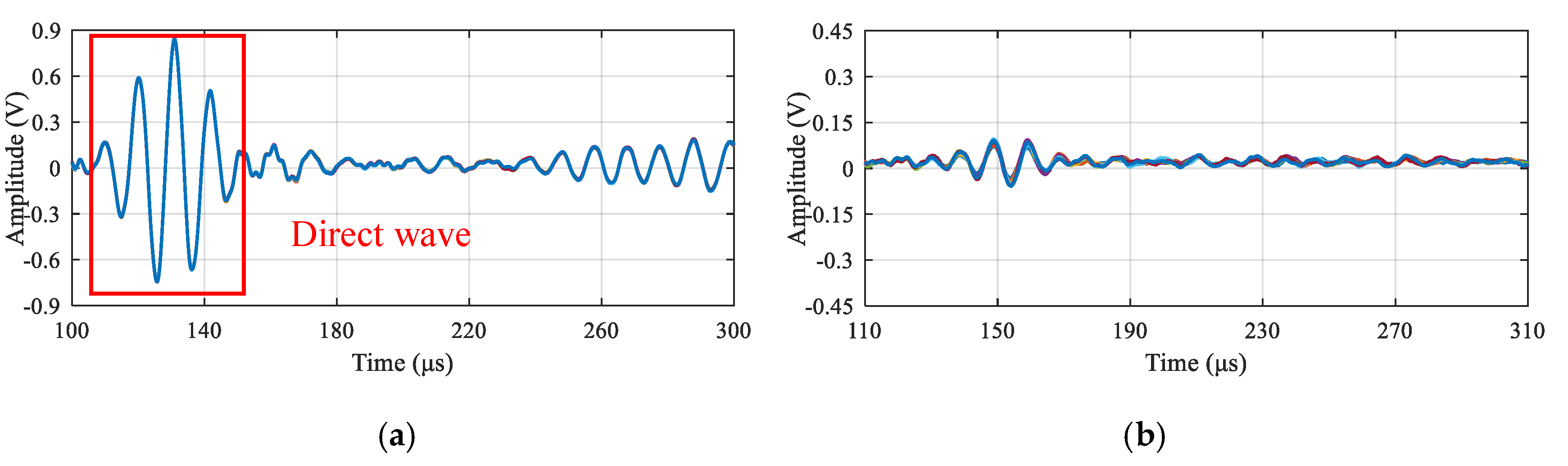
3.5. Damage Diagnostic Application
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ghoshroy, S. The X-37B: Backdoor weaponization of space? Bull. Atom. Scient. 2015, 71, 19–29. [Google Scholar] [CrossRef]
- Zagrai, A.; Campisi, M.; Anderson, M.; Hunter, D. Structural diagnostics, prognostics and health management for future space vehicles: Development, implementation and testing. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019. [Google Scholar]
- Enciu, D.; Ursu, I.; Toader, A. New results concerning structural health monitoring technology qualification for transfer to space vehicles. Struct Control. Health Monit. 2017, 24, e1992. [Google Scholar] [CrossRef]
- Pieczonka, L.; Ambroziński, L.; Staszewski, W.; Barnoncel, D.; Peres, P. Damage detection in composite panels based on mode-converted Lamb waves sensed using 3D laser scanning vibrometer. Opt. Lasers Eng. 2017, 99, 80–87. [Google Scholar] [CrossRef]
- Yuan, S.; Lai, X.; Zhao, X.; Xu, X.; Zhang, L. Distributed structural health monitoring system based on smart wireless sensor and multi-agent technology. Smart Mater. Struct. 2006, 15, 1–8. [Google Scholar] [CrossRef]
- Jang, B.M.; Kim, C.G. Real-time detection of low-velocity impact-induced delamination onset in composite laminates for efficient management of structural health. Compos. Pt. B-Eng. 2017, 123, 124–135. [Google Scholar] [CrossRef]
- Yuan, S.; Chen, J.; Yang, W.; Qiu, L. On-line crack prognosis in attachment lug using Lamb wave-deterministic resampling particle filter-based method. Smart Mater. Struct. 2017, 26, 085016. [Google Scholar] [CrossRef]
- Qing, X.; Li, W.; Wang, Y.; Sun, H. Piezoelectric Transducer-Based Structural Health Monitoring for Aircraft Applications. Sensors 2019, 19, 545. [Google Scholar] [CrossRef]
- Yuan, S.; Ren, Y.; Qiu, L.; Mei, H. A multi-response-based wireless impact monitoring network for aircraft composite structures. IEEE Trans. Ind. Electron. 2016, 63, 7712–7722. [Google Scholar] [CrossRef]
- Giurgiuiu, V.; Postolache, C.; Tudose, M. Radiation, temperature and vacuum effects on piezoelectric wafer active sensors. Smart Mater. Struct. 2016, 25, 035024. [Google Scholar] [CrossRef]
- Letchworth, G. X-33 reusable launch vehicle demonstrator, spaceport and range. In Proceedings of the AIAA SPACE 2011 Conference & Exposition, Long Beach, CA, USA, 27–29 September 2011. [Google Scholar]
- Kinet, D.; Megret, P.; Goossen, K.W.; Qiu, L.; Heider, D.; Caucheteur, C. Fiber bragg grating sensors toward structural health monitoring in composite materials: Challenges and solutions. Sensors 2014, 14, 7394–7419. [Google Scholar] [CrossRef]
- Qi, L.; Zeng, Z.; Zhang, Y.; Sun, L.; Rui, X.; Li, X.; Wang, L.; Liu, T.; Yue, G. Research on leakage location of spacecraft in orbit based on frequency weighting matrix beamforming algorithm by lamb waves. Appl. Sci. 2020, 10, 1201. [Google Scholar] [CrossRef]
- Caimmi, F.; Bruggi, M.; Mariani, S.; Bendiscioli, P. Towards the development of a MEMS-based health monitoring system for lightweight structures, In Proceedings of the International Electronic Conference on Sensors and Applications, 1–16 June 2014.
- Giurgiutiu, V. Structural Health Monitoring of Aerospace Composites; Academic Press: London, UK, 2015. [Google Scholar]
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Memmolo, V.; Monaco, E.; Boffa, N.D.; Maio, L.; Ricci, F. Guided wave propagation and scattering for structural health monitoring of stiffened composites. Compos. Struct. 2018, 184, 568–580. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.; Chang, F.K.; Bao, Q.; Mei, H. On-line updating Gaussian mixture model for aircraft wing spar damage evaluation under time-varying boundary condition. Smart Mater. Struct. 2014, 23, 125001. [Google Scholar] [CrossRef]
- Ursu, I.; Giurgiutiu, V.; Toader, A. Towards spacecraft applications of structural health monitoring. Incas Bulletin. 2012, 4, 111–124. [Google Scholar]
- Werlink, R.J.; Pena, F. NASA prototype all composite tank cryogenic pressure tests to failure with structural health monitoring. In Proceedings of the 10th International Workshop on Structural Health Monitoring, Stanford, CA, USA, 1–3 September 2015. [Google Scholar]
- Zagrai, A.; Demidovich, N.; Cooper, B. Structural health monitoring during suborbital spaceflight. In Proceedings of the 66th International Astronautical Congress, Jerusalem, Israel, 12–16 October 2015. [Google Scholar]
- Doyle, D.T.; Lee, S.; Stein, J.; Cooper, B.; Campisi, M.; Kessler, S.S. The spacecraft SHM experiment, Part 2: Integration, challenges and early ground science. In Proceedings of the 24th AIAA/AHS Adaptive Structures Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Yang, J.; Chang, F.K. Detection of bolt loosening in C-C composite thermal protection panels: II. Experimental verification. Smart Mater. Struct. 2006, 15, 591. [Google Scholar] [CrossRef]
- Kundu, T.; Das, S.; Jata, K.V. Health monitoring of a thermal protection system using Lamb waves. Struct Health Monit. 2009, 8, 29–45. [Google Scholar] [CrossRef]
- Zagrai, A.; Doyle, D.; Gigineishvili, V.; Brown, J.; Gardenier, H.; Arritt, B. Piezoelectric wafer active sensor structural health monitoring of space structures. J. Intell. Mater. Syst. Struct. 2010, 21, 921–940. [Google Scholar] [CrossRef]
- Toader, A.; Ursu, I.; Enciu, D. New advances in space SHM project. Incas Bulletin. 2015, 7, 65–80. [Google Scholar]
- Wang, Y.; Qiu, L.; Ding, R. A stretchable and large-scale guided wave sensor network for aircraft smart skin of structural health monitoring. Struct Health Monit. 2019, 475921719850641. [Google Scholar] [CrossRef]
- Wang, Y.; Luo, Y.; Qiu, L. Simulation method of an expandable lamb wave sensor network for aircraft smart skin. IEEE Sens. J. 2020, 20, 102–112. [Google Scholar] [CrossRef]
- Lin, M.; Chang, F.K. The manufacturing of composite structures with a built-in network of piezoceramics. Compos. Sci. Technol. 2002, 62, 919–939. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.; Shi, X.; Huang, T. Design of piezoelectric transducer layer with electromagnetic shielding and high connection reliability. Smart Mater. Struct. 2012, 21, 075032. [Google Scholar] [CrossRef]
- Bekas, D.G.; Sharif-Khodaei, Z.; Aliabadi, M.H. An innovative diagnostic film for structural health monitoring of metallic and composite structures. Sensors 2018, 18, 2084. [Google Scholar] [CrossRef]
- Salmanpour, M.S.; Khodaei, Z.S.; Aliabadi, M.H. Airborne transducer integrity under operational environment for structural health monitoring. Sensors 2016, 16, 2110. [Google Scholar] [CrossRef]
- Huang, W.T.; Lu, C.H.; Lin, D.B. Suppression of crosstalk using serpentine guard trace vias. Prog. Electromagn. Res. 2010, 109, 37–61. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S. On development of a multi-channel PZT array scanning system and its evaluating application on UAV wing box. Sens. Actuat. A-Phys. 2009, 151, 220–230. [Google Scholar] [CrossRef]
- Sohn, H.; Park, G.; Wait, J.R.; Limback, N.P.; Farrar, C.R. Wavelet-based active sensing for delamination detection in composite structures. Smart Mater. Struct. 2003, 13, 153–160. [Google Scholar] [CrossRef]
- Qiu, L.; Liu, M.; Qing, X.P.; Yuan, S. A quantitative multidamage monitoring method for large-scale complex composite. Struct Health Monit. 2013, 12, 183–196. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency (Hz) | Power Spectra Density (g2/Hz) | RMS Acceleration (g) | Duration |
|---|---|---|---|
| 20~100 | 3 dB/oct | 24.3 | 7 min/direction |
| 100~250 | 0.16 | ||
| 250~350 | 0.79 | ||
| 350~1500 | 0.32 | ||
| 1500~2000 | −6 dB/oct |
| Frequency (Hz) | Power Spectra Density (g2/Hz) | RMS Acceleration (g) | Duration |
|---|---|---|---|
| 20~50 | 3 dB/oct | 36.34 | 4.5 min/direction |
| 50~1000 | 0.9 | ||
| 1000~2000 | −6 dB/oct |
| Direction | Overload (g) | Duration Time | |
|---|---|---|---|
| Longitudinal acceleration | Forward | 6 | 1 min |
| Backward | 2 | 1 min | |
| Vertical acceleration | Forward | 4.5 | 1 min |
| Backward | 4.5 | 1 min | |
| Transverse acceleration | Forward | 2 | 1 min |
| Backward | 2 | 1 min | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, Y.; Tao, J.; Xue, Z. Design of a Large-Scale Piezoelectric Transducer Network Layer and Its Reliability Verification for Space Structures. Sensors 2020, 20, 4344. https://doi.org/10.3390/s20154344
Ren Y, Tao J, Xue Z. Design of a Large-Scale Piezoelectric Transducer Network Layer and Its Reliability Verification for Space Structures. Sensors. 2020; 20(15):4344. https://doi.org/10.3390/s20154344
Chicago/Turabian StyleRen, Yuanqiang, Jingya Tao, and Zhaopeng Xue. 2020. "Design of a Large-Scale Piezoelectric Transducer Network Layer and Its Reliability Verification for Space Structures" Sensors 20, no. 15: 4344. https://doi.org/10.3390/s20154344
APA StyleRen, Y., Tao, J., & Xue, Z. (2020). Design of a Large-Scale Piezoelectric Transducer Network Layer and Its Reliability Verification for Space Structures. Sensors, 20(15), 4344. https://doi.org/10.3390/s20154344