An RSSI Classification and Tracing Algorithm to Improve Trilateration-Based Positioning




Abstract
:1. Introduction
- (1)
- We propose a tri-partition classification of RSSIs, considering that the interference effects are finite and unambiguous, increasing and decreasing while the interference sources are multiple and fuzzy. And we also propose a clustering algorithm to trace the tri-partition classification quantitatively and seek the partition distribution centers, helping to reveal the interference and judge whether the sun-classification conforms to normal distribution.
- (2)
- We take the proposed algorithm as an RSSI filter and discuss its work mechanism. And we infer that it is feasible by analyzing the features in terms of sample count and deviation and advantages compared to the mean filter.
- (3)
- We verify that the proposed filter works in path-loss exponent fitting and location computing, and analyze the improvement of IPS it yields.
2. Literature Review
2.1. Received Signal Strength Indicator (RSSI)-Based Trilateration Indoor Positioning System (IPS)
2.2. RSSI Filtering Technologies
3. RSSI Classification and Tracing
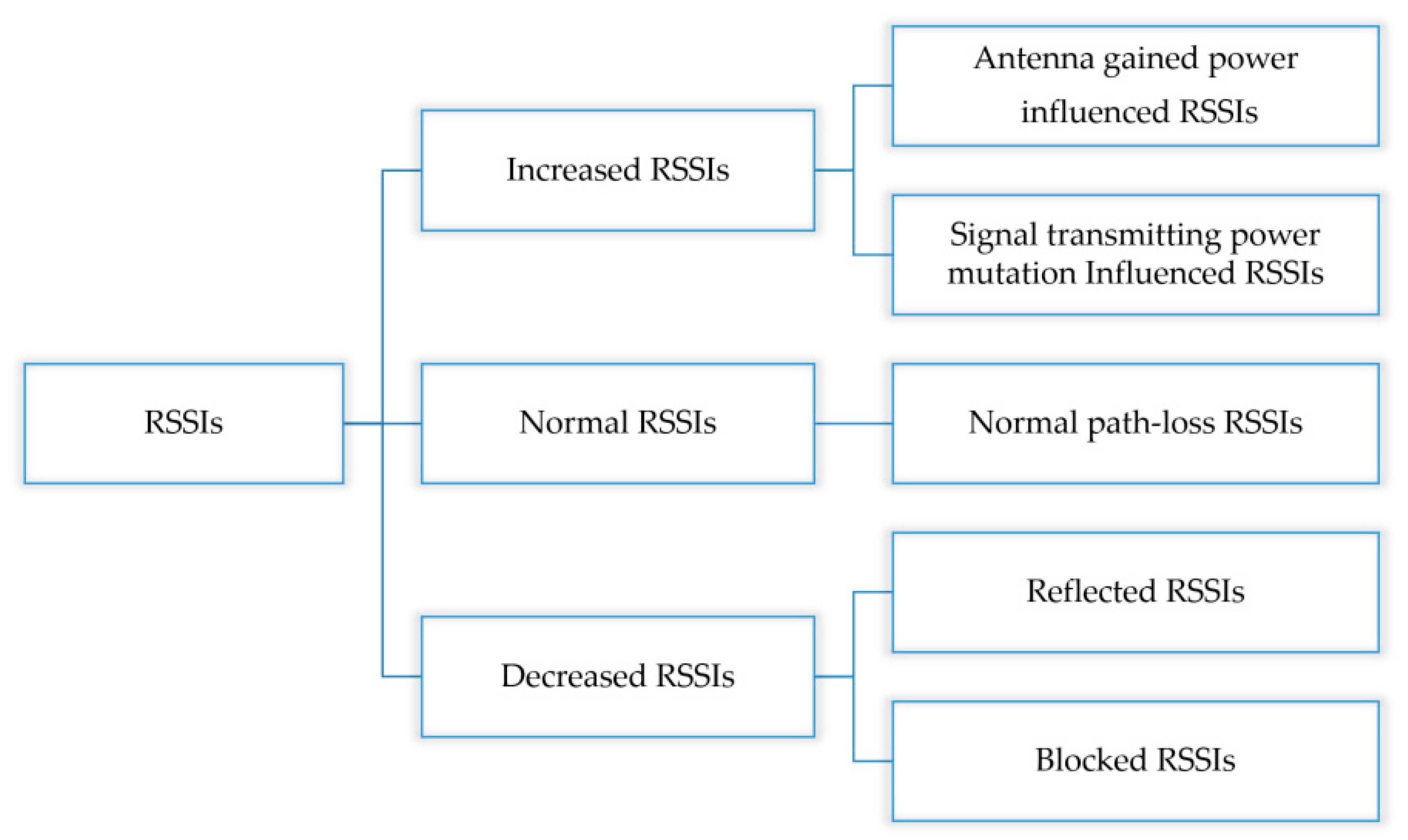
3.1. Tri-Partition RSSI Classification
- The decreased collection (DC) represents singular weakened RSSIs such as blocked and reflected signals.
- The normal collection (NC) represents normal path-loss and fading RSSIs.
- The increased collection (IC) represents singular enhanced RSSIs caused by transmitting equipment such as antenna gained power or transmitting power mutation.
3.2. RSSI Tracing Algorithm
| Algorithm 1. Sub-Classification Tracing. |
| Input: R = {RSSI1, RSSI2, …, RSSIn}//the collected RSSI samples Output: NC, IC, DC |
| Define://initial the center of IC, NC, and DC IV = MAX(R), NV = AVERAGE(R), and DV = MIN(R) ICT = ϕ, NCT = ϕ, and DCT = ϕ //temporal collections TD = ID = ND = DD = 0.0 //temporal values. Classify: For each (RSSIi ∈ R){ //calculate its distance to IV, NV, and DV ID = abs (IV- RSSIi) ND = abs (NV- RSSIi) DD = abs (DV- RSSIi) //select the minimum distance TD = MIN ({ID, ND, DD}) //add RSSIi to sub-classification If (TD= =ID) IC = IC + { RSSIi } Else if (TD= =ND) NC = NC+{ RSSIi } Else DC = DC + { RSSIi } } Judge: //judge the change of sub-classification If (ICT = = NCT = = DCT = = ϕ){ ICT = IC NCT = NC DCT = DC } GOTO (Reset) //if convergence, exit If (ICT = = IC and NCT = = NC and DCT = = DC) GOTO (Exit) Else { ICT = IC NCT = NC DCT = DC } Reset: //reset the sub-classification center IV = AVERAGE (IC) NV = AVERAGE (NC) DV = AVERAGE (DC) GOTO (Classify) Exit: //deal with ϕ If (NC = = ϕ) { TD = (ID + DD)/2 NC+ = {TD} } EXIT(-) |
3.3. Apply to Trilateration-Based Positioning
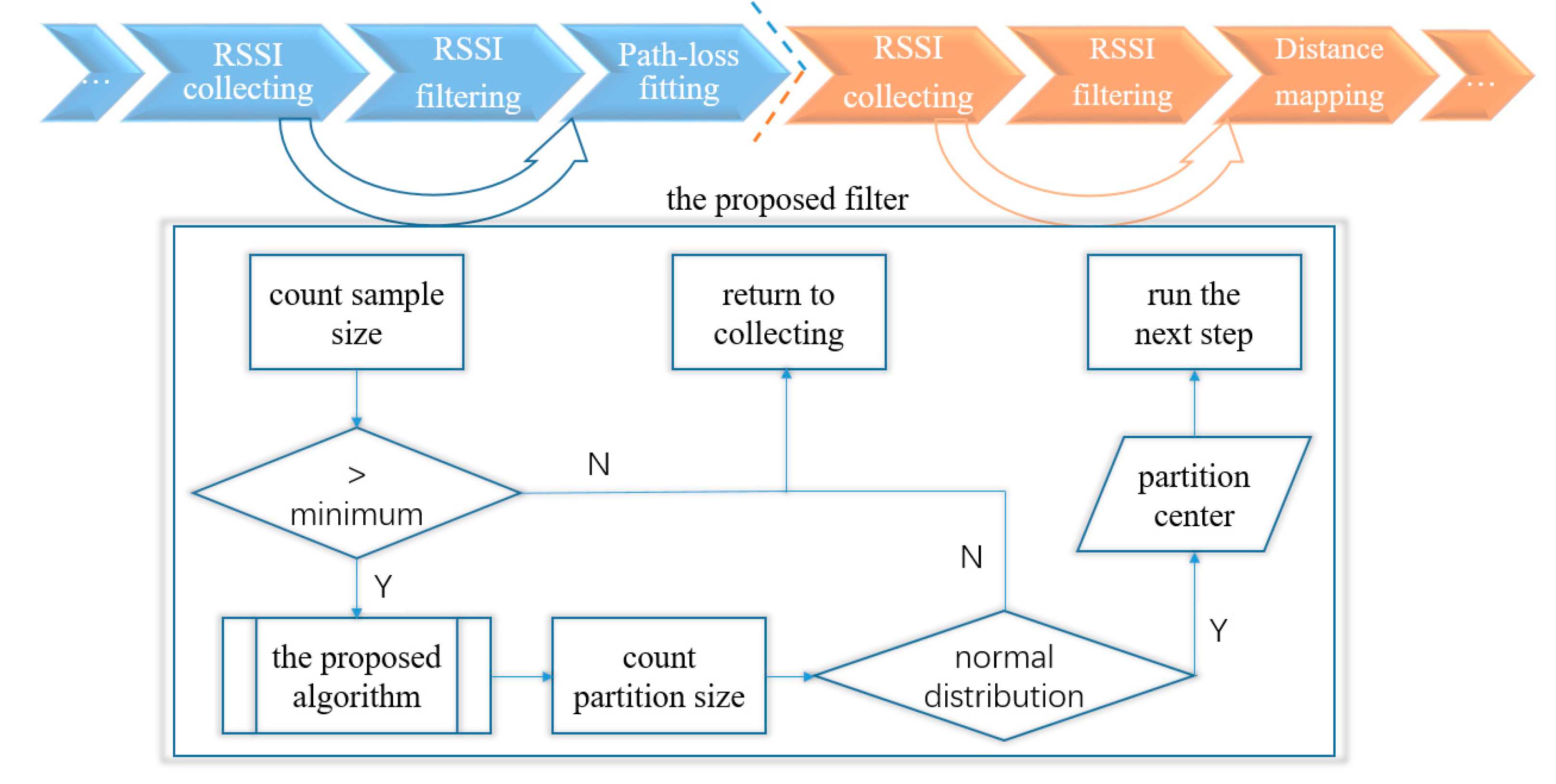
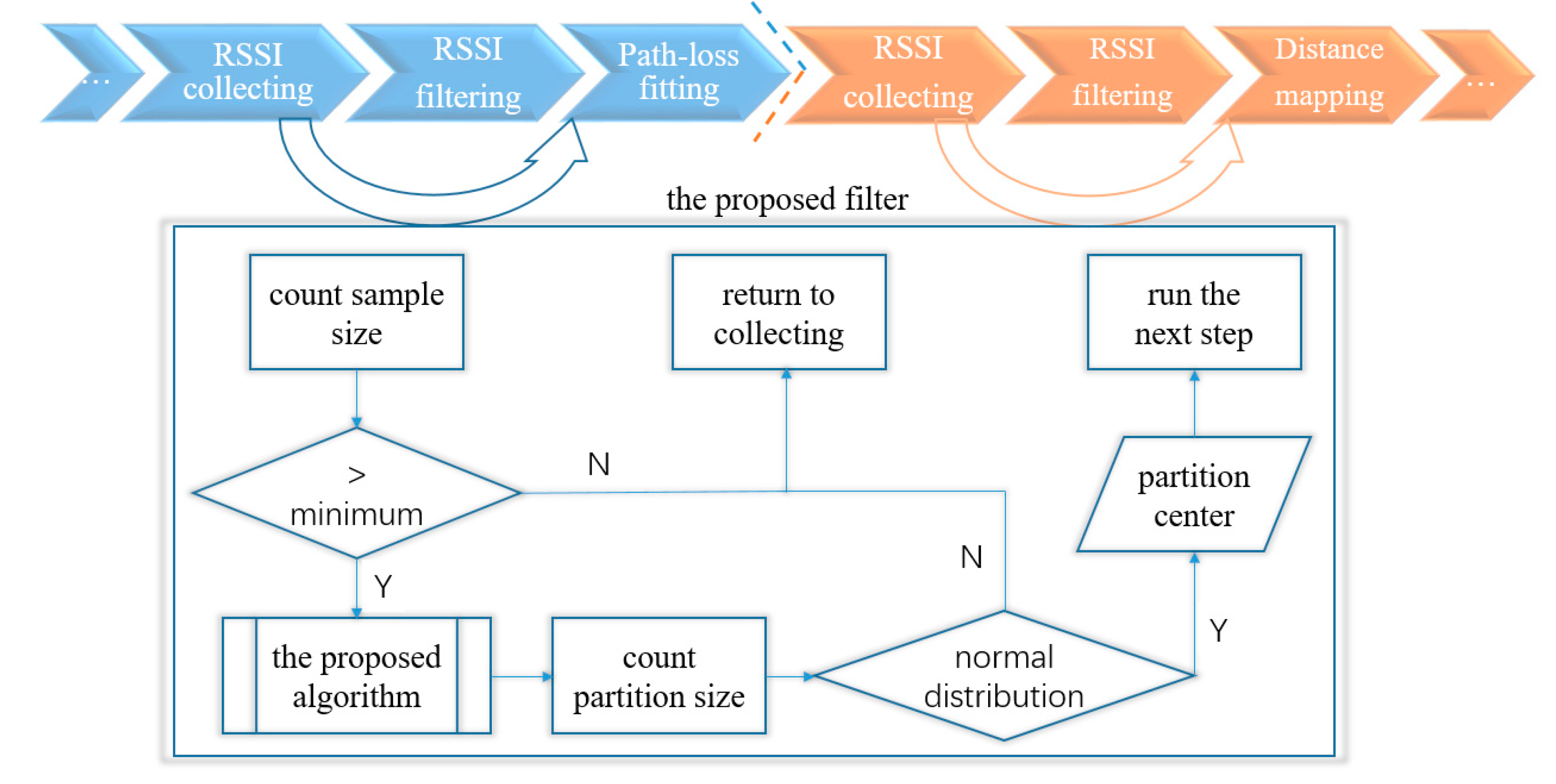
4. Feasibility and Performance as an RSSI Filter
4.1. Features of the Proposed Filter
4.1.1. Low Deviation
4.1.2. Minimum Sample Count
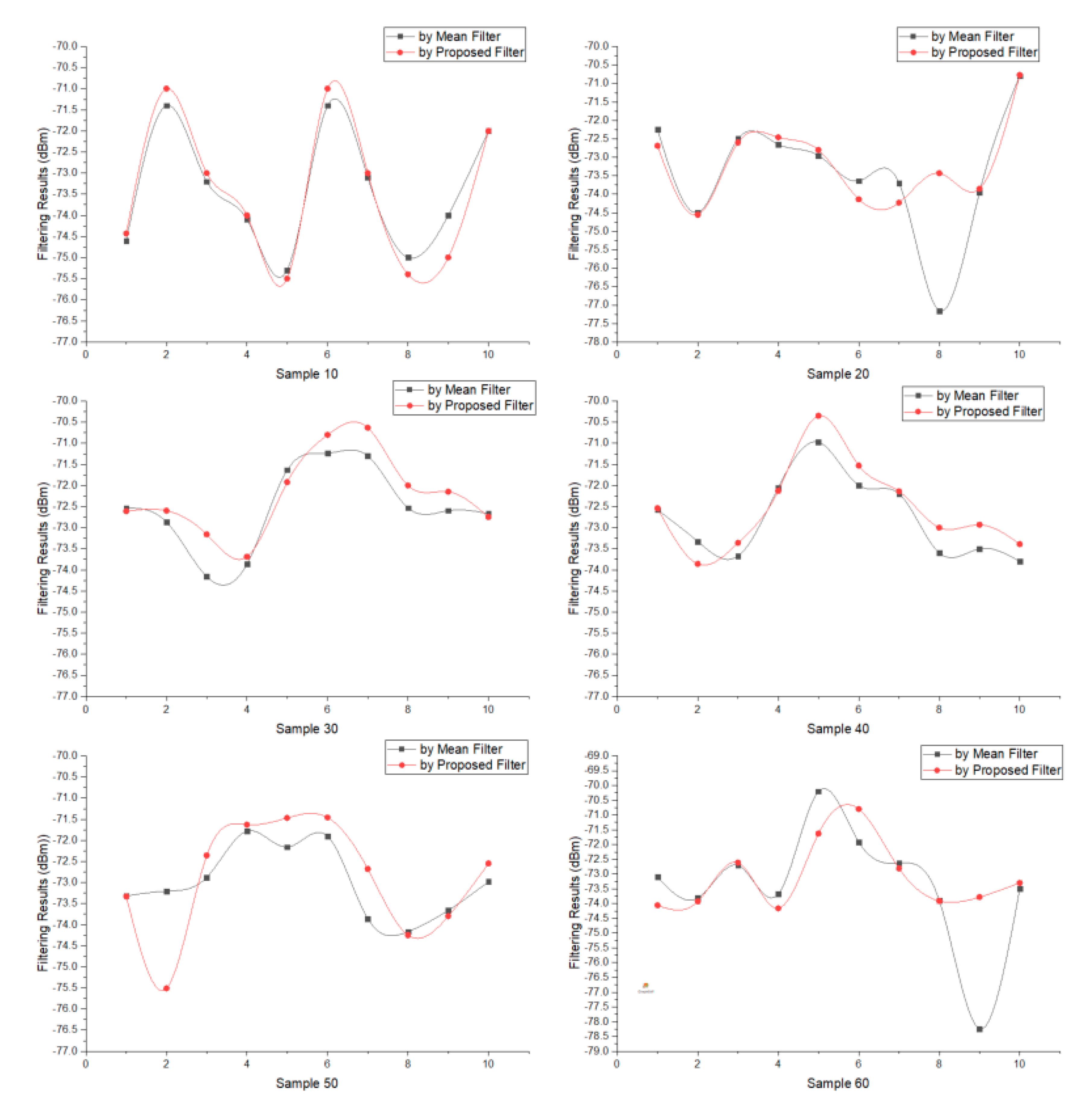
4.2. Advantages over the Mean Filter
4.2.1. Reducing Variance over Time
4.2.2. Reducing Left-Skewness
5. Positioning Improvement
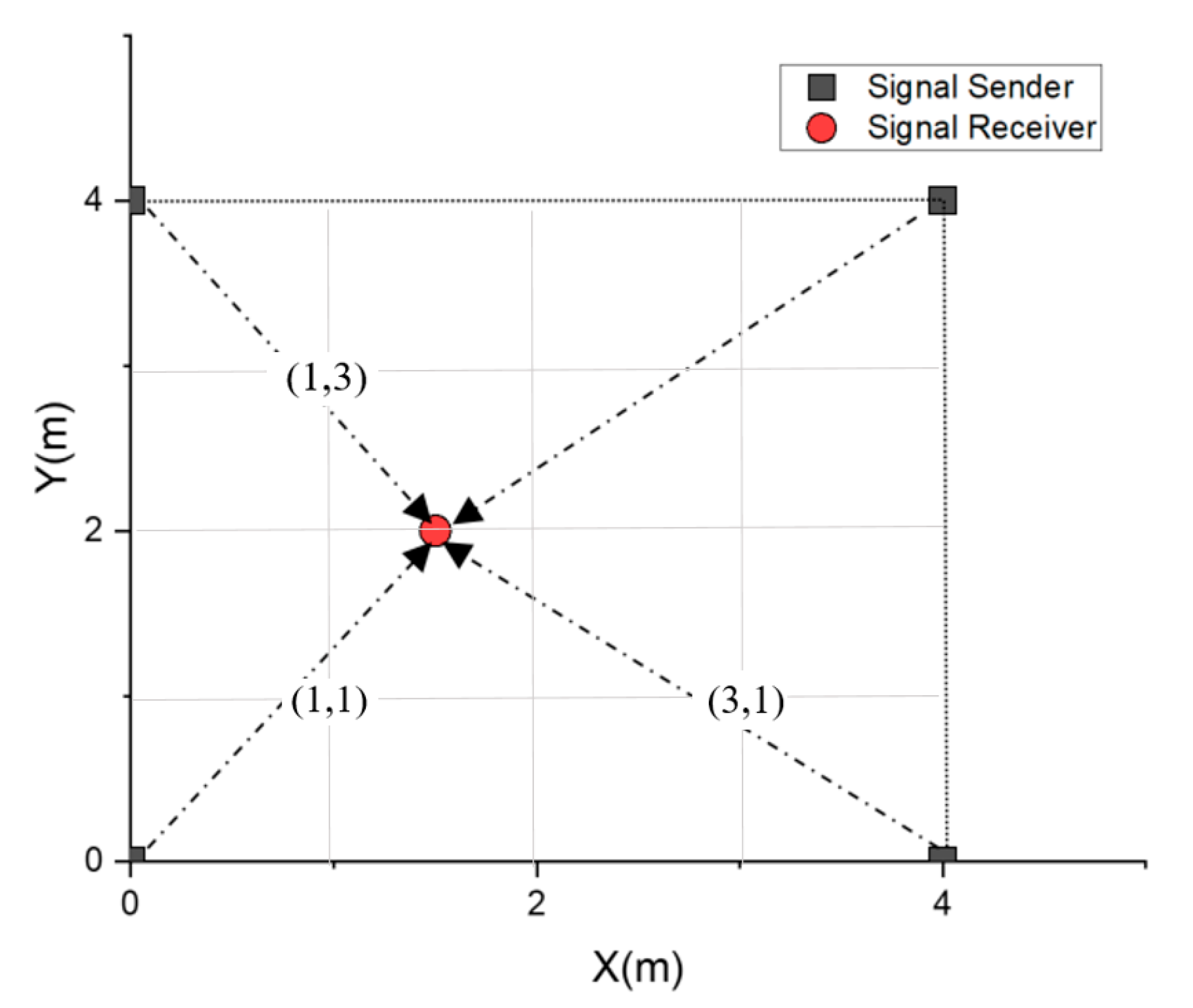
5.1. Experiment Design
- Fit RSSI propagation model factors,
- collect RSSI samples at each fixed distance (1 m, 2 m, …, 10 m),
- filter each sample using the proposed and mean filters, and
- fit the propagation model according to Formula (2).
- For each positioning process,
- filter RSSI samples using the proposed and mean filters,
- perform traditional trilateral positioning, and
- compare the positioning results.
- Repeat step (2) for the next test process.
5.2. Experiment Results
5.2.1. Propagation Factors
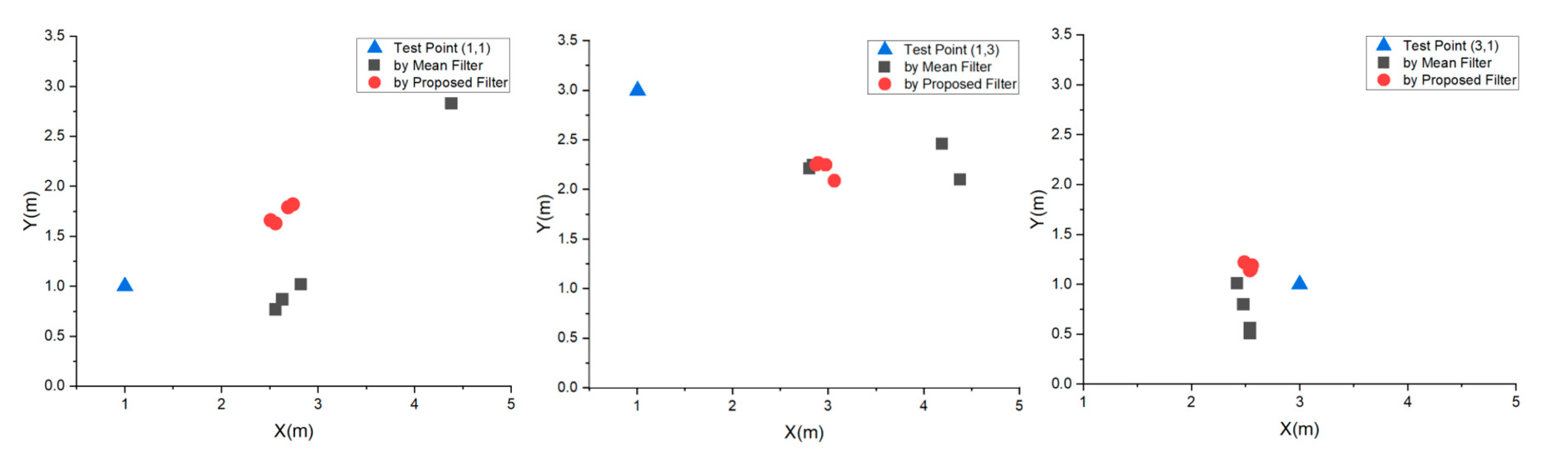
5.2.2. Positioning Results
5.3. Improvement Analysis
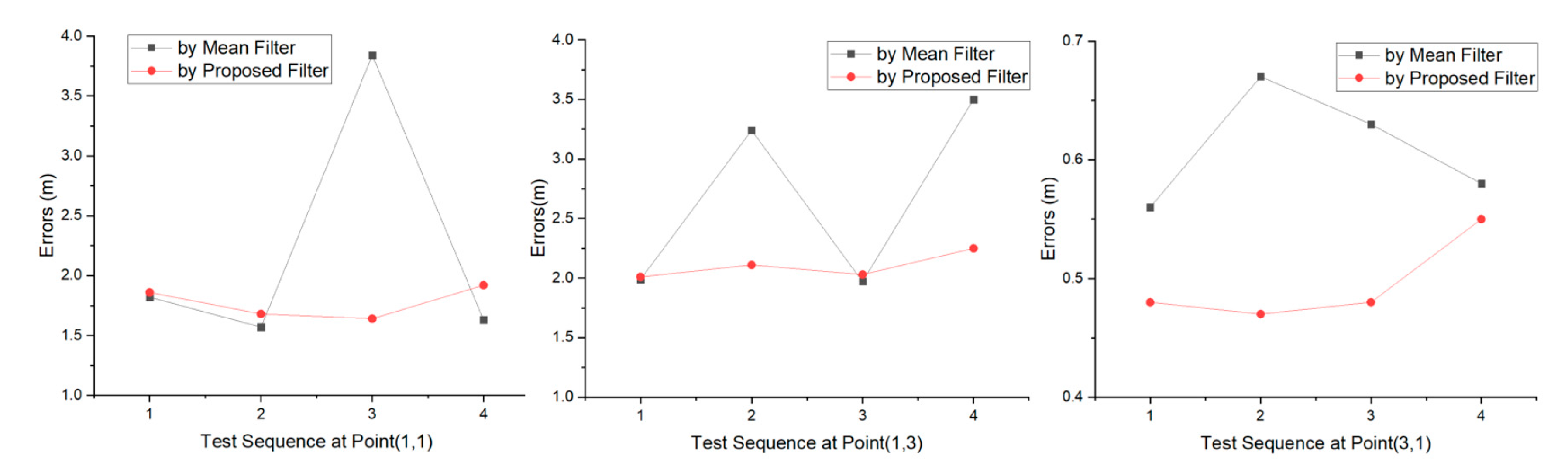
5.3.1. Accuracy
5.3.2. Stability
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ali, W.H.; Kareem, A.A.; Jasim, M. Survey on Wireless Indoor Positioning Systems. CUESJ 2019, 3, 42–47. [Google Scholar] [CrossRef] [Green Version]
- Lee1, K.; Nam1, Y.; Min, S.D. An indoor localization solution using Bluetooth RSSI and multiple sensors on a smartphone. Multimed. Tools Appl. 2018, 77, 12635–12654. [Google Scholar] [CrossRef]
- Oguntala, G.; Abd-Alhameed, R.A.; Jones, S.; Noras, J.; Patwary, M.; Rodriguez, J. Indoor location identification technologies for real-time IoT-based applications: An inclusive survey. Comput. Sci. Rev. 2018, 30, 55–79. [Google Scholar] [CrossRef]
- Brena, R.F.; García-Vázquez, J.P.; Galván-Tejada, C.E.; Muñoz-Rodriguez, D.; Vargas-Rosales, C.; Fangmeyer, J. Evolution of Indoor Positioning Technologies. Surv. J. Sens. 2017, 2017, 2630413. [Google Scholar] [CrossRef]
- Huang, H.; Gartner, G.; Krisp, J.M.; Raubal, M.; Van de Weghe, N. Location based services: Ongoing evolution and research agenda. J. Locat. Based Serv. 2018, 12, 63–93. [Google Scholar] [CrossRef]
- Ito, K.; Xiong, K. Gaussian filters for nonlinear filtering problems. IEEE Trans. Autom. Control 2020, 45, 910–927. [Google Scholar] [CrossRef] [Green Version]
- Sung, Y. RSSI-Based Distance Estimation Framework Using a Kalman Filter for Sustainable Indoor Computing Environments. Sustainability 2016, 8, 1136. [Google Scholar] [CrossRef] [Green Version]
- Chao, C.H.; Chu, C.Y.; Wu, A.Y. Location-Constrained Particle Filter human positioning and tracking system. In Proceedings of the 2008 IEEE Workshop on Signal Processing Systems, Washington, DC, USA, 8–10 October 2008; pp. 73–76. [Google Scholar]
- Liu, H.H.; Chen, W.C.; Hsu, P.C. Comparison of NVA and RLOWESS Algorithms in Indoor Positioning System. In Proceedings of the 2019 20th Asia-Pacific Network Operations and Management Symposium (APNOMS), Matsue, Japan, 18–20 September 2019; pp. 1–4. [Google Scholar]
- Shojaifar, A. Evaluation and Improvement of the RSSI-Based Localization Algorithm Received Signal Strength Indication (RSSI); Blekinge Institute of Technology: Karlskrona, Sweden, 2015. [Google Scholar]
- Luo, J.; Zhan, X. Characterization of Smart Phone Received Signal Strength Indication for WLAN Indoor Positioning Accuracy Improvement. J. Netw. 2014, 9, 739. [Google Scholar] [CrossRef]
- Koledoye, M.A.; De Martini, D.; Rigoni, S.; Facchinetti, T. A Comparison of RSSI Filtering Techniques for Range-based Localization. In Proceedings of the 2018 IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA), Turin, Italy, 4–7 September 2018; pp. 761–767. [Google Scholar]
- Xue, W.; Qiu, W.; Hua, X.; Yu, K. Improved Wi-Fi RSSI Measurement for Indoor Localization. IEEE Sens. J. 2017, 17, 2224–2230. [Google Scholar] [CrossRef]
- Shi, Y.; Long, Y.; Lu, F.; Xu, Z.; Xiao, X.; Shi, S. Indoor RSSI Trilateral Algorithm Considering Piecewise and Space-Scene. In Proceedings of the 2017 IEEE International Conference on Smart Cloud, New York, NY, USA, 3–5 November 2017; pp. 278–282. [Google Scholar]
- Kaemarungsi, K.; Krishnamurthy, P. Properties of indoor received signal strength for WLAN location fingerprinting. In Proceedings of the First Annual International Conference on Mobile and Ubiquitous Systems: Networking and Services, MOBIQUITOUS 2004, Boston, MA, USA, 26 August 2004; pp. 14–23. [Google Scholar]
- Wang, B.; Gan, X.; Liu, X.; Yu, B.; Jia, R.; Huang, L.; Jia, H. A Novel Weighted KNN Algorithm Based on RSS Similarity and Position Distance for Wi-Fi Fingerprint Positioning. IEEE Access 2020, 8, 30591–30602. [Google Scholar] [CrossRef]
- Subedi, S.; Gang, H.S.; Ko, N.Y.; Hwang, S.S.; Pyun, J.Y. Improving Indoor Fingerprinting Positioning with Affinity Propagation Clustering and Weighted Centroid Fingerprint. IEEE Access 2019, 7, 31738–31750. [Google Scholar] [CrossRef]
- Liu, H.H.; Lo, W.H.; Tseng, C.C.; Shin, H.Y. A WiFi-based weighted screening method for indoor positioning systems. Wirel. Pers. Commun. 2014, 79, 611–627. [Google Scholar] [CrossRef]
- Suroso, D.J.; Cherntanomwong, P.; Sooraksa, P.; Takada, J.-I. Location fingerprint technique using fuzzy C-means clustering algorithm for indoor localization. In Proceedings of the TENCON 2011-2011 IEEE Region 10 Conference, Bali, Indonesia, 21–24 November 2011; pp. 88–92. [Google Scholar]
- Yunfei, C.; Taihang, D.; Chundong, J.; Ling, Q.I.; Sun, S. Optimal processing of singular values of K-means clustering algorithm in indoor location. Sci. Technol. Eng. 2018, 18, 95–99. [Google Scholar]
- Chandrawanshi, V.S.; Tripathi, R.K.; Pachauri, R. An Intelligent Energy Efficient Clustering Technique for Multiple Base Stations Positioning in a Wireless Sensor Network. J. Intell. Fuzzy Syst. 2019, 36, 2409–2418. [Google Scholar] [CrossRef]
- Zhang, W.; Hua, X.; Yu, K.; Qiu, W.; Zhang, S.; He, X. A novel WiFi indoor positioning strategy based on weighted squared Euclidean distance and local principal gradient direction. Sens. Rev. 2019, 39, 99–106. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, F.; Zhao, L. Research and Optimization of BLE Fingerprint Indoor Positioning Algorithm Based on Fusion Clustering. In Proceedings of the 2019 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 29–31 March 2019; pp. 95–100. [Google Scholar]
- Honkavirta, V.; Perala, T.; Ali-Loytty, S.; Piché, R. A Compartive Survey of WLAN Location Fingerprinting Methods. In Proceedings of the 2009 6th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 19 March 2009. [Google Scholar]
- Teoman, E.; Ovatman, T. Trilateration in Indoor Positioning with an Uncertain Reference Point. In Proceedings of the 2019 IEEE 16th International Conference on Networking, Sensing and Control (ICNSC), Banff, AB, Canada, 9–11 May 2019; pp. 397–402. [Google Scholar]
- Heurtefeux, K.; Valois, F. Is rssi a good choice for localization in wireless sensor network? In Proceedings of the 2012 IEEE 26th International Conference on Advanced Information Networking and Applications, Fukuoka, Japan, 26–29 March 2012; pp. 732–739. [Google Scholar]
- Huang, K.; He, K.; Du, X. A Hybrid Method to Improve the BLE-Based Indoor Positioning in a Dense Bluetooth Environment. Sensors 2019, 19, 424. [Google Scholar] [CrossRef] [Green Version]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2015, 18, 466–490. [Google Scholar] [CrossRef]
- Zhang, W.; Dong, Y.; Wang, X. Indoor Positioning methods using Rfid and Block clustering. Comput. Eng. Appl. 2016, 52, 112–117. [Google Scholar]
- Yang, G.L.; Kong, Y.P.; Zhong, Z.M.; Zhang, Y.L. Multimode-fingerprint matching based indoor positioning System Design and Implementation. Comput. Eng. Des. 2013, 34, 1896–1900. [Google Scholar]
- Mehra, R.; Singh, A. Real Time RSSI Error Reduction in Distance Estimation Using RLS Algorithm. In Proceedings of the IEEE 3rd International Advance Computing Conference, IACC 2013, Ghaziabad, India, 22–23 February 2013; pp. 661–665. [Google Scholar]
- Zhenghua, Z.; Lei, D.; Jiawen, L.; Xu, T. Research of optimizing weighted centroid distance correction localization algorithm based on RSSI. In Proceedings of the 2013 IEEE 11th International Conference on Electronic Measurement & Instruments, Harbin, China, 16–19 August 2013; pp. 552–556. [Google Scholar]
- Zhou, C.; Yuan, J.; Liu, H.; Qiu, J. Bluetooth Indoor Positioning Based on RSSI and Kalman Filter. Wirel. Pers. Commun. 2017, 96, 4115–4130. [Google Scholar] [CrossRef]
- Chen, Y.; Pan, Q.; Liang, Y.; Hu, Z. AWCL: Adaptive weighted centroid target localization algorithm based on RSSI in WSN. In Proceedings of the 2010 3rd International Conference on Computer Science and Information Technology, Chengdu, China, 9–11 July 2010; pp. 331–336. [Google Scholar]
- Golestani, A.; Petreska, N.; Wilfert, D.; Zimmer, C. Improving the Precision of RSSI-based Low- Energy Localization Using Path Loss Exponent Estimation. In Proceedings of the 2014 11th Workshop on Positioning, Navigation and Communication (WPNC), Dresden, Germany, 12–13 March 2014. [Google Scholar]
- Yong, S.H.I. Research on Indoor-Positioning Methods and Technologies Considering Indoor Space-Scene. Ph.D. Thesis, Nanjing Normal University, Nanjing, China, December 2016. [Google Scholar]
- Sugano, M.; Kawazoe, T.; Ohta, Y.; Murata, M. Indoor localization system using RSSI measurement of wireless sensor network based on ZigBee standard. Wirel. Opt. Commun. 2006, 538, 1–6. [Google Scholar]
- Zhou, H.; Hu, J.; Wu, H.; Guo, C. Indoor positioning research based on wireless sensor network topology optimization. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 3951–3957. [Google Scholar]
- Chen, F. Global Optimization Placement of Bluetooth Nodes Based on Indoor Maps. Master’s Thesis, Nanjing Normal University, Nanjing, China, June 2017. [Google Scholar]
- Li, X.R. RSS-based location estimation with unknown path-loss model. IEEE Trans. Wirel. Commun. 2006, 5, 3626–3633. [Google Scholar] [CrossRef]
- Lin, L.X.; So, H.C.; Chan, Y.T. Accurate and simple source localization using differential received signal strength. Digit. Signal Process. 2013, 23, 736–743. [Google Scholar] [CrossRef] [Green Version]
- Coluccia, A.; Ricciato, F. Maximum likelihood trajectory estimation of a mobile node from RSS measurements. In Proceedings of the 2012 9th Annual Conference on Wireless On-Demand Network Systems and Services (WONS), Courmayeur, Italy, 9–11 January 2012; pp. 151–158. [Google Scholar]
- Brunato, M.; Battiti, R. Statistical learning theory for location fingerprinting in wireless LANs. Comput. Netw. 2005, 47, 825–845. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Zhang, Y.; Li, W.; Tao, X.; Zhang, P. ConFi: Convolutional neural networks based indoor Wi-Fi localization using channel state information. IEEE Access 2017, 5, 18066–18074. [Google Scholar] [CrossRef]
- Cui, X.; Yang, J.; Li, J.; Wu, C. Improved Genetic Algorithm to Optimize the Wi-Fi Indoor Positioning Based on Artificial Neural Network. IEEE Access 2020, 8, 74914–74921. [Google Scholar] [CrossRef]
- Wu, L.; Chen, C.-H.; Zhang, Q. A Mobile Positioning Method Based on Deep Learning Techniques. Electronics 2019, 8, 59. [Google Scholar] [CrossRef] [Green Version]
- Hoang, M.T.; Yuen, B.; Dong, X.; Lu, T.; Westendorp, R.; Reddy, K. Recurrent Neural Networks for Accurate RSSI Indoor Localization. IEEE Internet Things J. 2019, 6, 10639–10651. [Google Scholar] [CrossRef] [Green Version]
- Hoang, M.T.; Zhu, Y.; Yuen, B.; Reese, T.; Dong, X.; Lu, T.; Westendorp, R.; Xie, M. A soft range limited K-nearest neighbours algorithm for indoor localization enhancement. IEEE Sens. J. 2018, 18, 10208–10216. [Google Scholar] [CrossRef] [Green Version]
- Neishaboori, A.; Harras, K. Energy saving strategies in WiFi indoor localization. Proc. Acm Mswim 2013, 399–404. [Google Scholar] [CrossRef]
- Li, Y.; He, Z.; Li, Y.; Xu, H.; Pei, L.; Zhang, Y. Towards Location Enhanced IoT: Characterization of LoRa Signal for Wide Area Localization. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018. [Google Scholar]
- Xu, Y. Autonomous Indoor Localization Using Unsupervised Wi-Fi Fingerprinting; Kassel University Press: Kassel, Germany, 2016. [Google Scholar]
- Jayakanth, K.; AbdelGhani, K.; Somaya, A.M.; Al-Ali, A. Indoor positioning and wayfnding systems: A survey. Hum.Cent. Comput. Inf. Sci. 2020, 10, 1–41. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample Type | Max Positive Deviation (dBm) | Max Negative Deviation (dBm) | Mean Absolute Deviation (dBm) |
|---|---|---|---|
| Sample 10 | 1.99 | 2.51 | 1.44 |
| Sample 20 | 2.22 | 1.572 | 0.89 |
| Sample 30 | 1.36 | 1.17 | 0.83 |
| Sample 40 | 1.64 | 0.87 | 0.70 |
| Sample 50 | 1.53 | 1.56 | 0.92 |
| Sample 60 | 1.36 | 1.17 | 0.83 |
| Sample Type | Items Count | DC Rate | NC Rate | IC Rate |
|---|---|---|---|---|
| Sample 10 | 103 | 28% | 32% | 38% |
| Sample 20 | 201 | 21% | 60% | 19% |
| Sample 30 | 300 | 26% | 51% | 23% |
| Sample 40 | 400 | 25% | 55% | 20% |
| Sample 50 | 500 | 25% | 50% | 25% |
| Sample 60 | 600 | 19% | 57% | 23% |
| Sample Type | Mean Filter | Proposed Filter | ||||||
|---|---|---|---|---|---|---|---|---|
| Max Range | Min Range | Average Range | SV | Max Range | Min Range | Average Range | SV | |
| Sample 10 | 3.2 | 1.0 | 1.96 | 2.28 | 3.9 | 1.96 | 2.25 | 2.68 |
| Sample 20 | 3.46 | 0.15 | 1.69 | 2.28 | 3.08 | 0.03 | 1.11 | 1.54 |
| Sample 30 | 2.23 | 0.06 | 0.66 | 1.03 | 1.77 | 0.01 | 0.69 | 0.95 |
| Sample 40 | 1.62 | 0.1 | 0.76 | 0.96 | 1.32 | 0.07 | 0.67 | 0.82 |
| Sample 50 | 1.96 | 0.3 | 0.82 | 1.03 | 1.25 | 0.01 | 0.65 | 0.83 |
| Sample 60 | 5.35 | 0.71 | 2.12 | 2.77 | 2.53 | 0.13 | 1.12 | 1.44 |
| Sample Type | Mitigating | Others Less 1 dbm | Others Less0.5 dbm |
|---|---|---|---|
| Sample 10 | 70% | 100% | 66.7% |
| Sample 20 | 50% | 100% | 80% |
| Sample 30 | 70% | 100% | 100% |
| Sample 40 | 70% | 100% | 66.7% |
| Sample 50 | 80% | 100% | 100% |
| Sample 60 | 50% | 80% | 60% |
| Filter | Filtered RSSI at 1 m (α) | Fitted Path-Loss Parameter (β) |
|---|---|---|
| The proposed filter | –80.14 dBm | 4.613 |
| The mean filter | –83.82 dBm | 2.326 |
| Test Point | Positioning Results Using the Mean Filter | Positioning Results Using the Proposed Filter | ||
|---|---|---|---|---|
| Coordinate x | Coordinate y | Coordinate x | Coordinate y | |
| (1,1) | 2.82 | 1.02 | 2.69 | 1.79 |
| 2.56 | 0.77 | 2.56 | 1.63 | |
| 4.38 | 2.83 | 2.51 | 1.66 | |
| 2.63 | 0.87 | 2.74 | 1.82 | |
| (1,3) | 2.84 | 2.25 | 2.87 | 2.25 |
| 4.19 | 2.46 | 2.97 | 2.25 | |
| 2.80 | 2.21 | 2.89 | 2.27 | |
| 4.38 | 2.10 | 3.06 | 2.09 | |
| (3,1) | 2.48 | 0.80 | 2.56 | 1.18 |
| 2.54 | 0.51 | 2.55 | 1.15 | |
| 2.54 | 0.56 | 2.54 | 1.14 | |
| 2.42 | 1.01 | 2.49 | 1.22 | |
| Test Point | Positioning Errors Using the Mean Filter | Positioning Errors Using the Proposed Filter | Average Accuracy Promotion | ||||
|---|---|---|---|---|---|---|---|
| Maximum | Minimum | Average | Maximum | Minimum | Average | ||
| (1,1) | 3.84 | 1.57 | 2.22 | 1.92 | 1.64 | 1.78 | 19.8% |
| (1,3) | 3.5 | 1.97 | 2.68 | 2.25 | 2.01 | 2.1 | 21.6% |
| (3,1) | 0.67 | 0.56 | 0.61 | 0.55 | 0.48 | 0.51 | 16.0% |
| Test Point | Positioning Stability Using the Mean Filter | Positioning Stability Using the Proposed Filter | SSD Promote | ||||
|---|---|---|---|---|---|---|---|
| STDEV(R) | AVERAGE(R) | SSD | STDEV(R) | AVERAGE(R) | SSD | (–fold) | |
| (1,1) | 1.089 | 2.215 | 0.491 | 0.136 | 1.775 | 0.077 | 6.45 |
| (1,3) | 0.81 | 2.675 | 0.303 | 0.109 | 2.1 | 0.052 | 5.82 |
| (3,1) | 0.05 | 0.61 | 0.081 | 0.037 | 0.5 | 0.05 | 1.08 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Shi, W.; Liu, X.; Xiao, X. An RSSI Classification and Tracing Algorithm to Improve Trilateration-Based Positioning. Sensors 2020, 20, 4244. https://doi.org/10.3390/s20154244
Shi Y, Shi W, Liu X, Xiao X. An RSSI Classification and Tracing Algorithm to Improve Trilateration-Based Positioning. Sensors. 2020; 20(15):4244. https://doi.org/10.3390/s20154244
Chicago/Turabian StyleShi, Yong, Wenzhong Shi, Xintao Liu, and Xianjian Xiao. 2020. "An RSSI Classification and Tracing Algorithm to Improve Trilateration-Based Positioning" Sensors 20, no. 15: 4244. https://doi.org/10.3390/s20154244
APA StyleShi, Y., Shi, W., Liu, X., & Xiao, X. (2020). An RSSI Classification and Tracing Algorithm to Improve Trilateration-Based Positioning. Sensors, 20(15), 4244. https://doi.org/10.3390/s20154244