Fault-Tolerant Model Predictive Control Algorithm for Path Tracking of Autonomous Vehicle


Abstract
1. Introduction
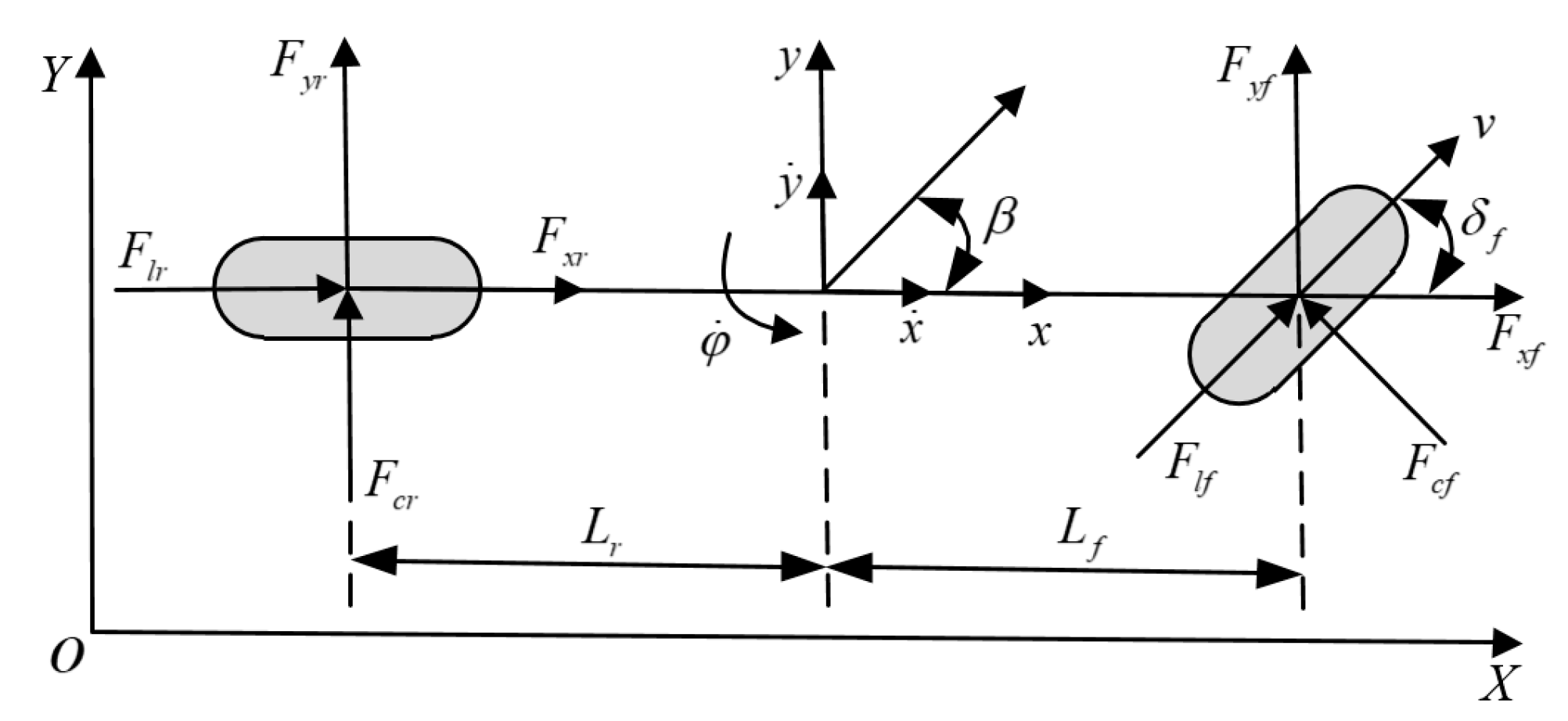
2. Modeling and Problem Linearization
Linearization of Vehicle Dynamics Model
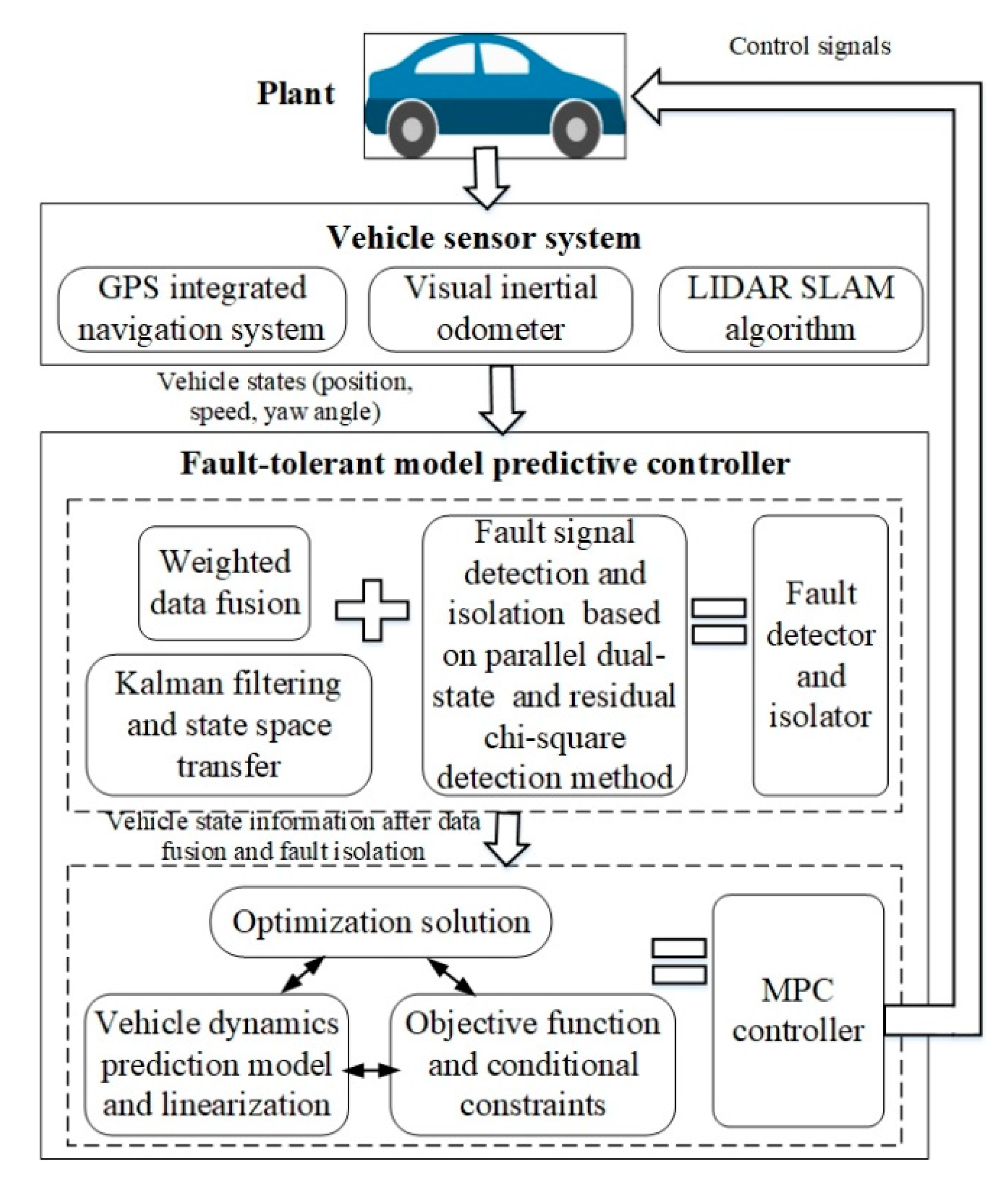
3. Model Predictive Controller for Vehicle Lateral Motion Control
3.1. Construct the Objective Function
3.2. Construct the Constraints
3.2.1. Front Wheel Declination and Its Incremental Constraints
3.2.2. Dynamic Constraint of Tire Cornering
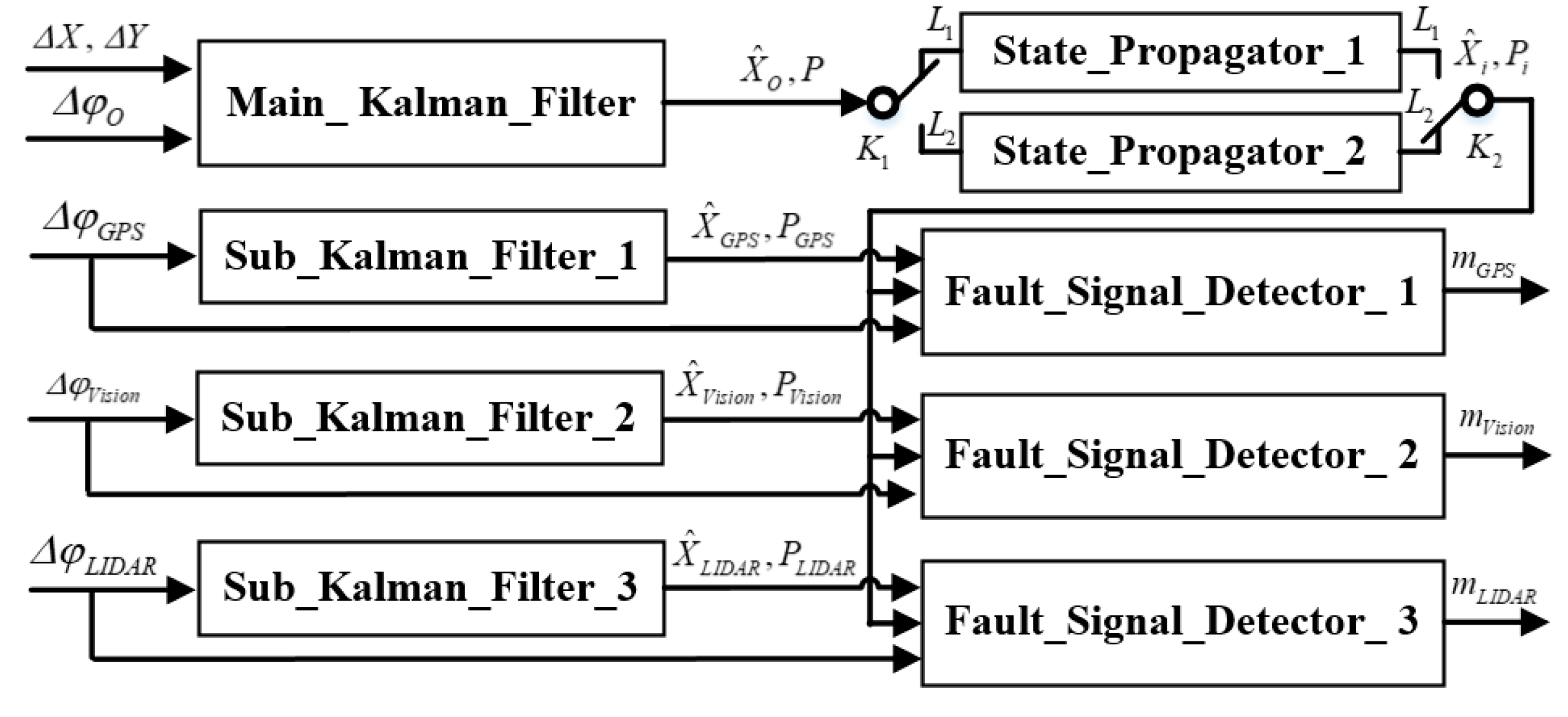
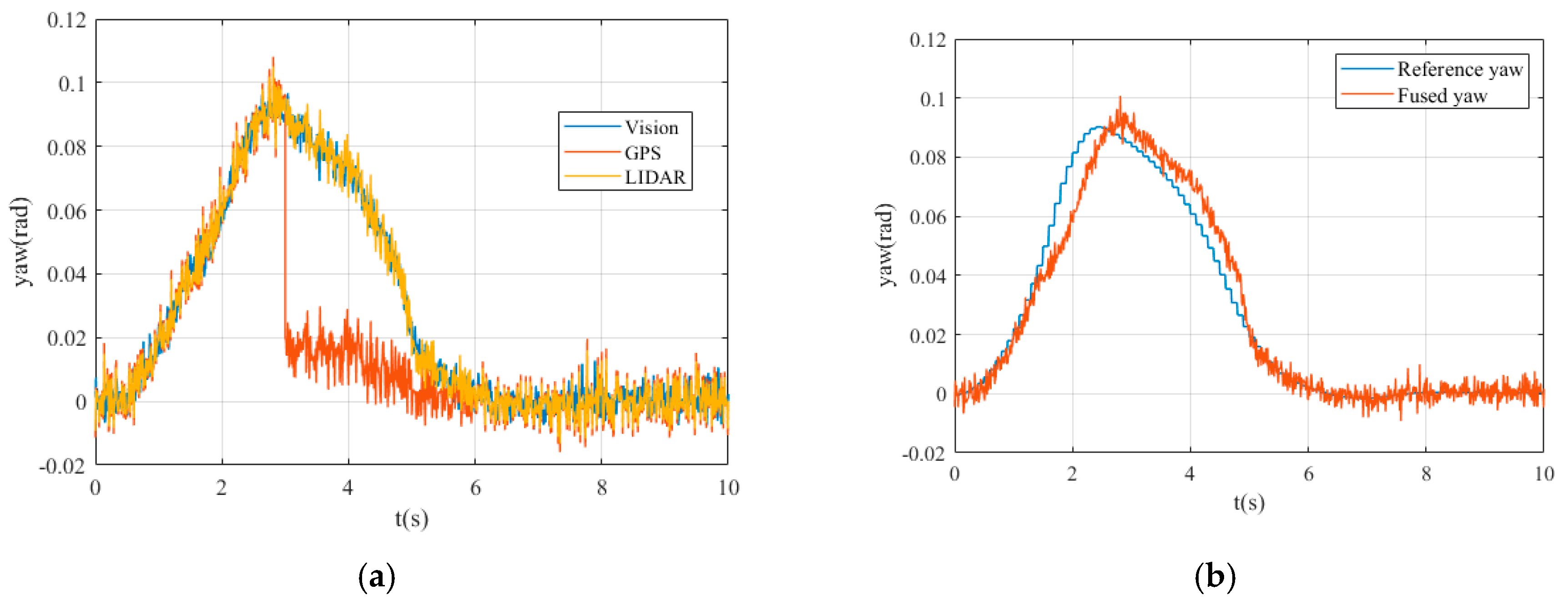
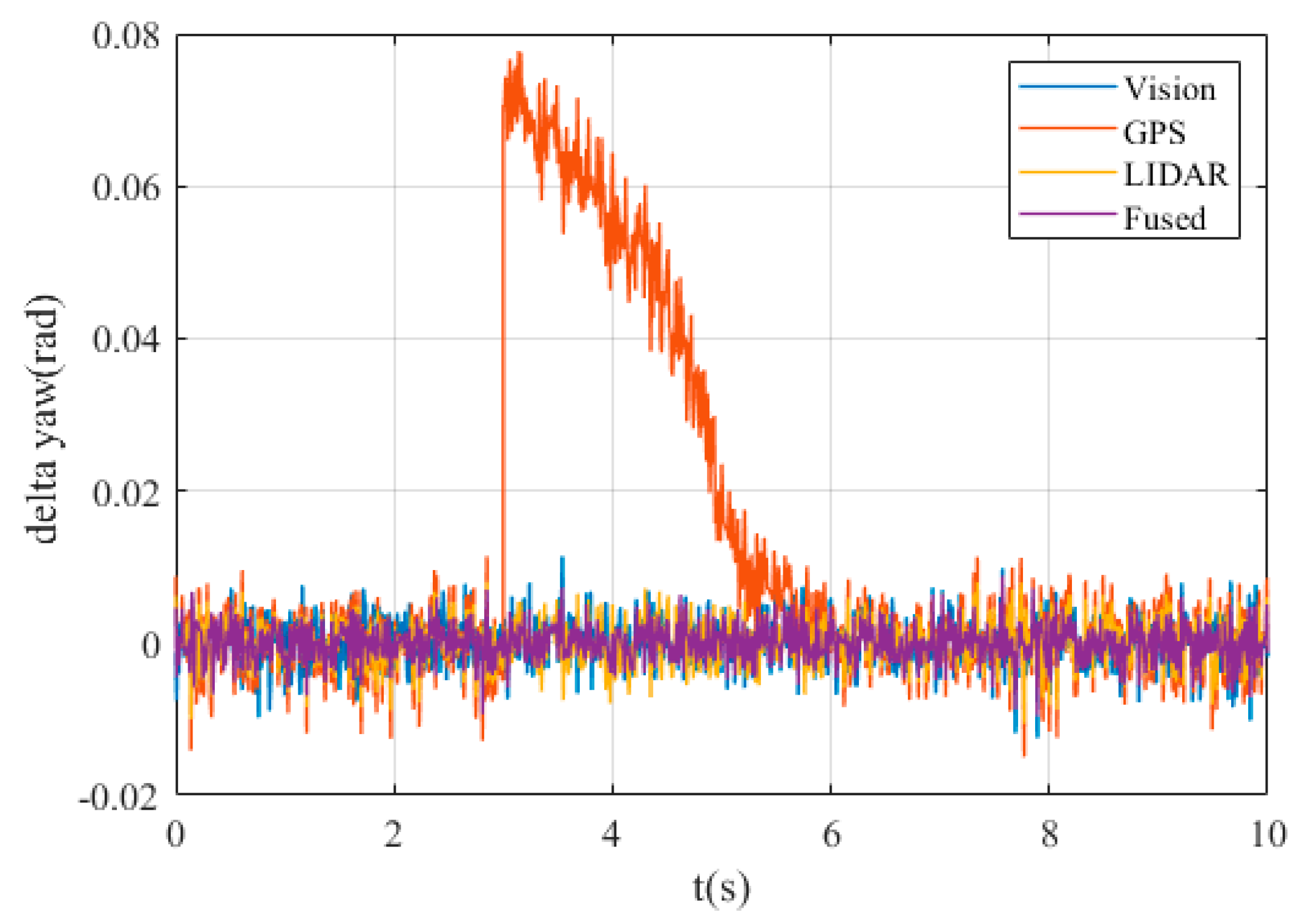
3.2.3. Multi-Sensor Information Data Fusion and Fault Signal Isolation
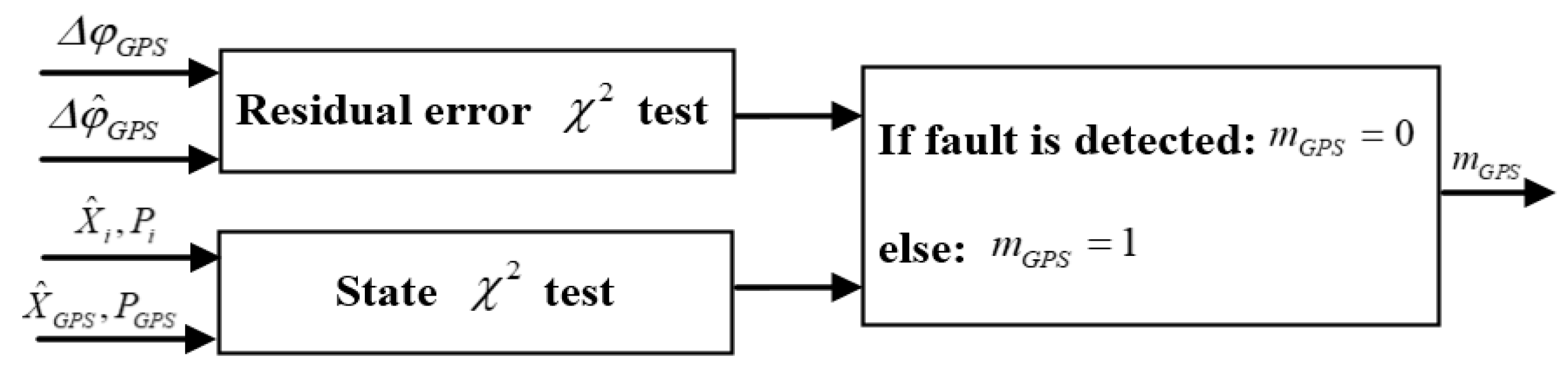
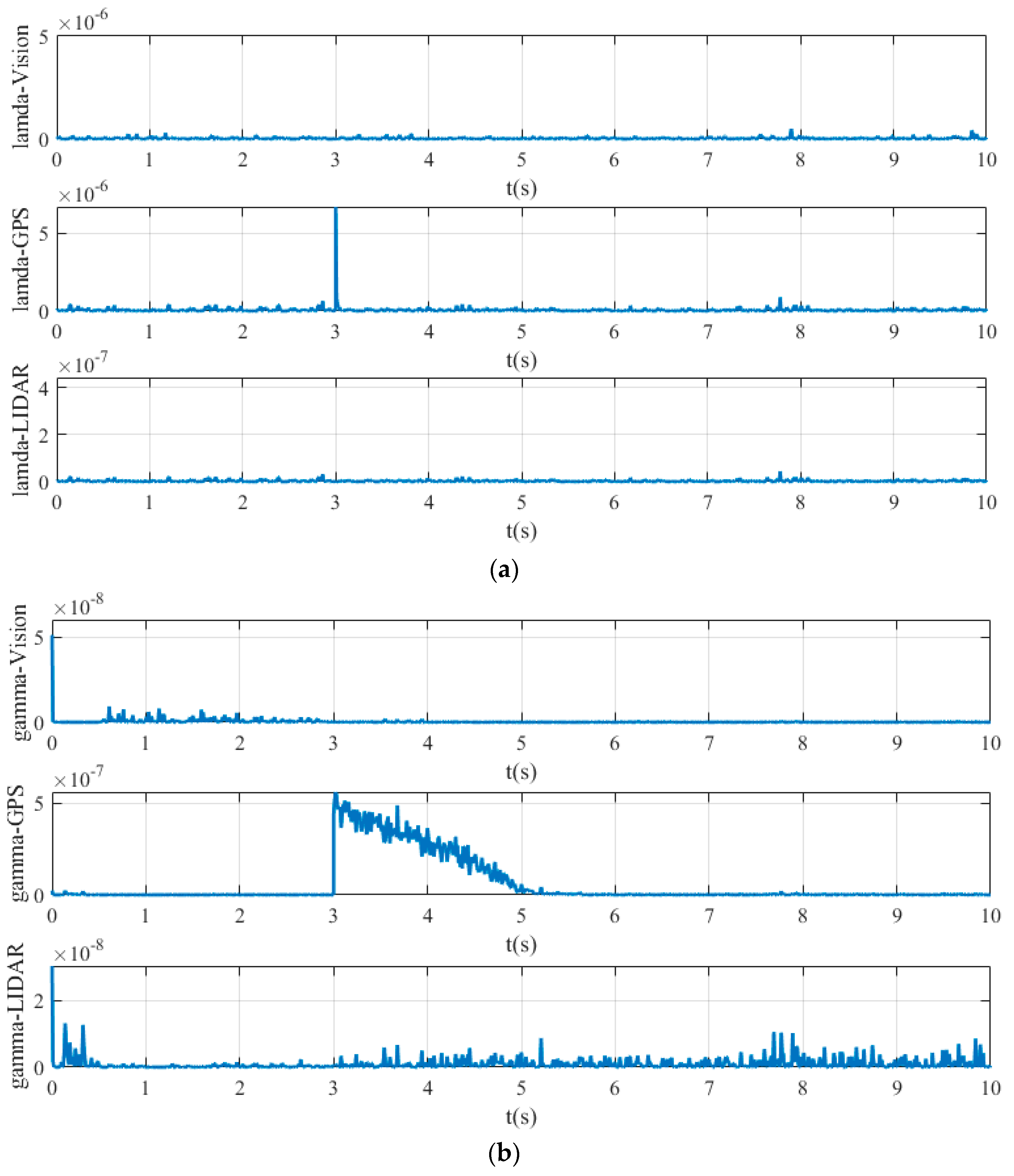
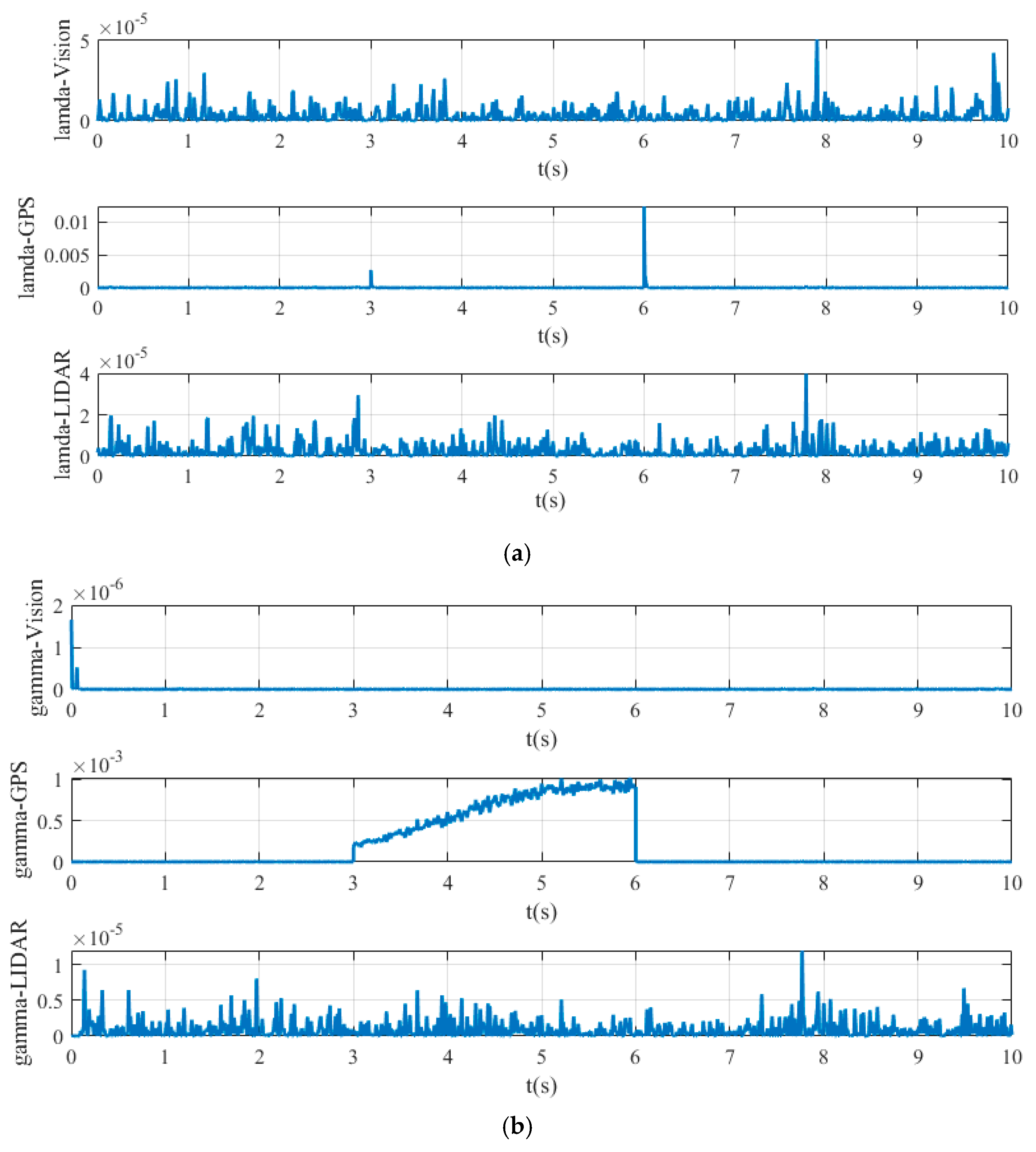
3.3. Fault Signal Detector Design
4. Simulation Experiment Verification and Discussion
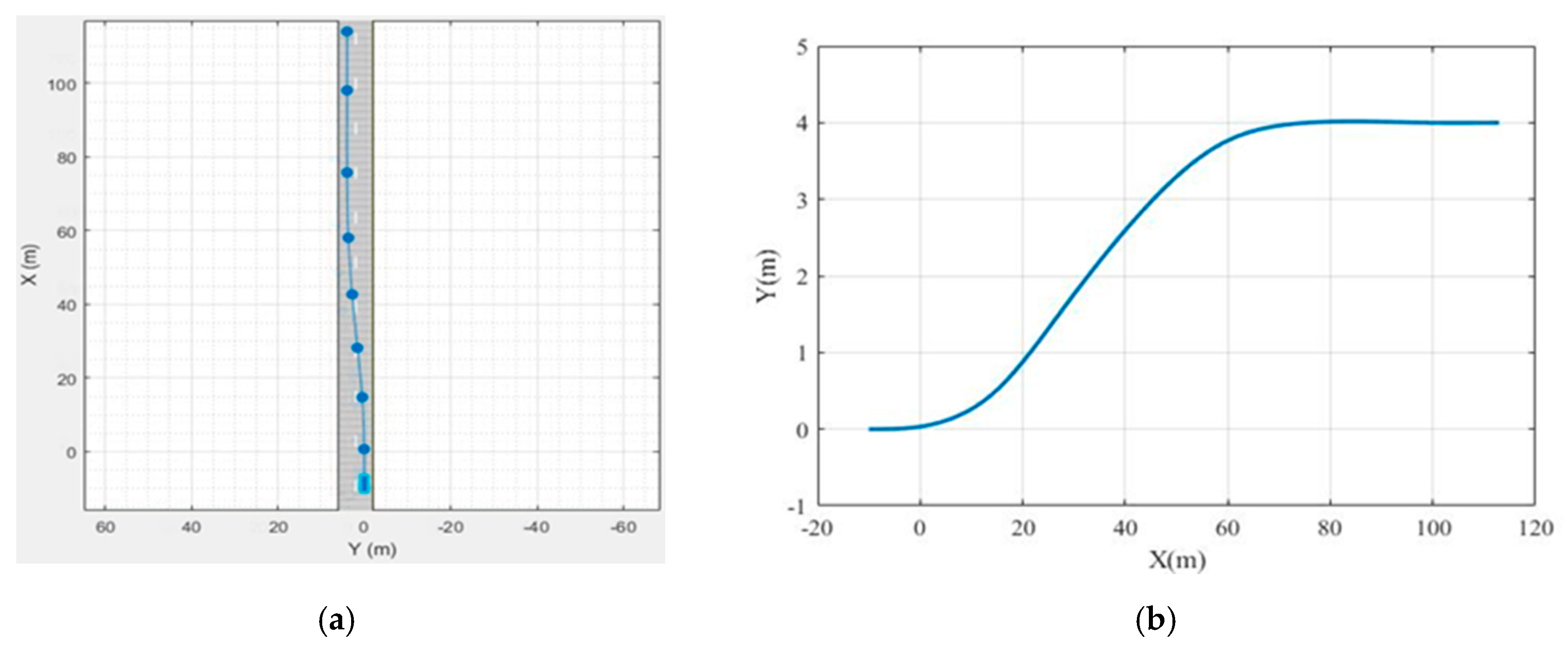
4.1. Working Conditions Description
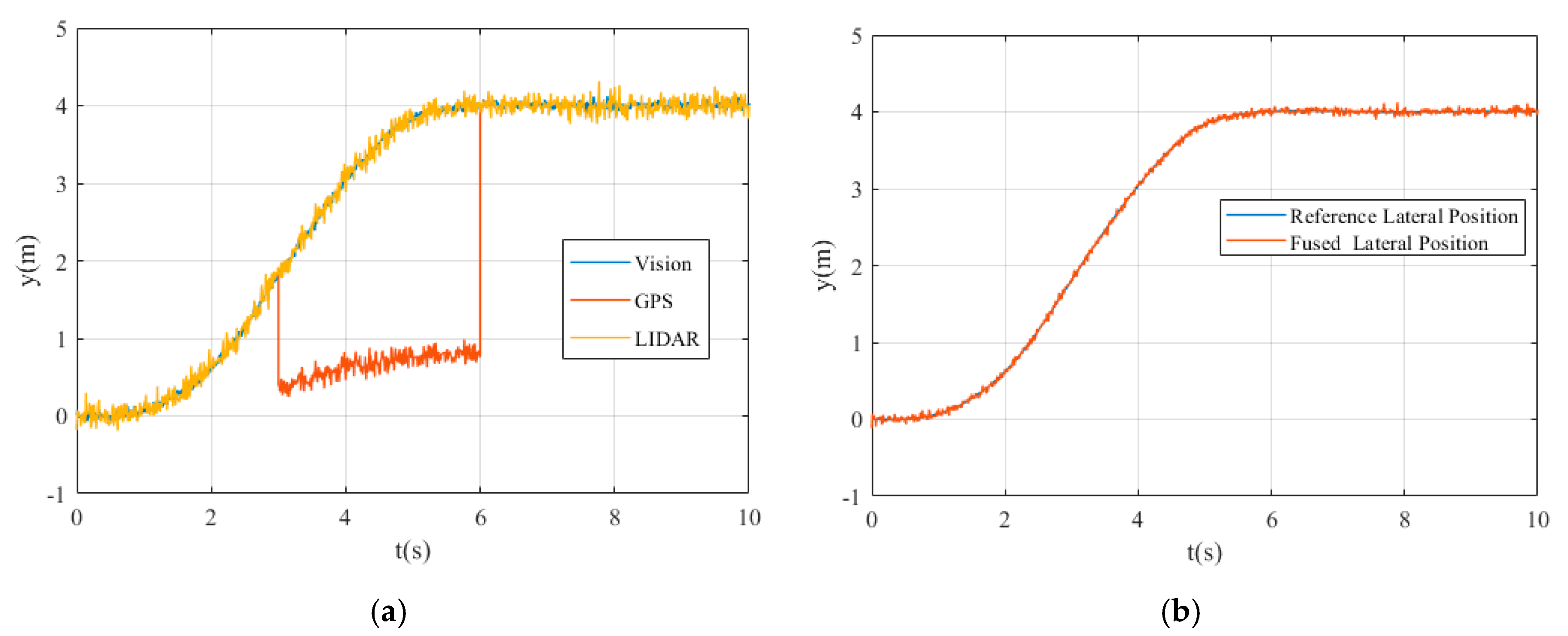
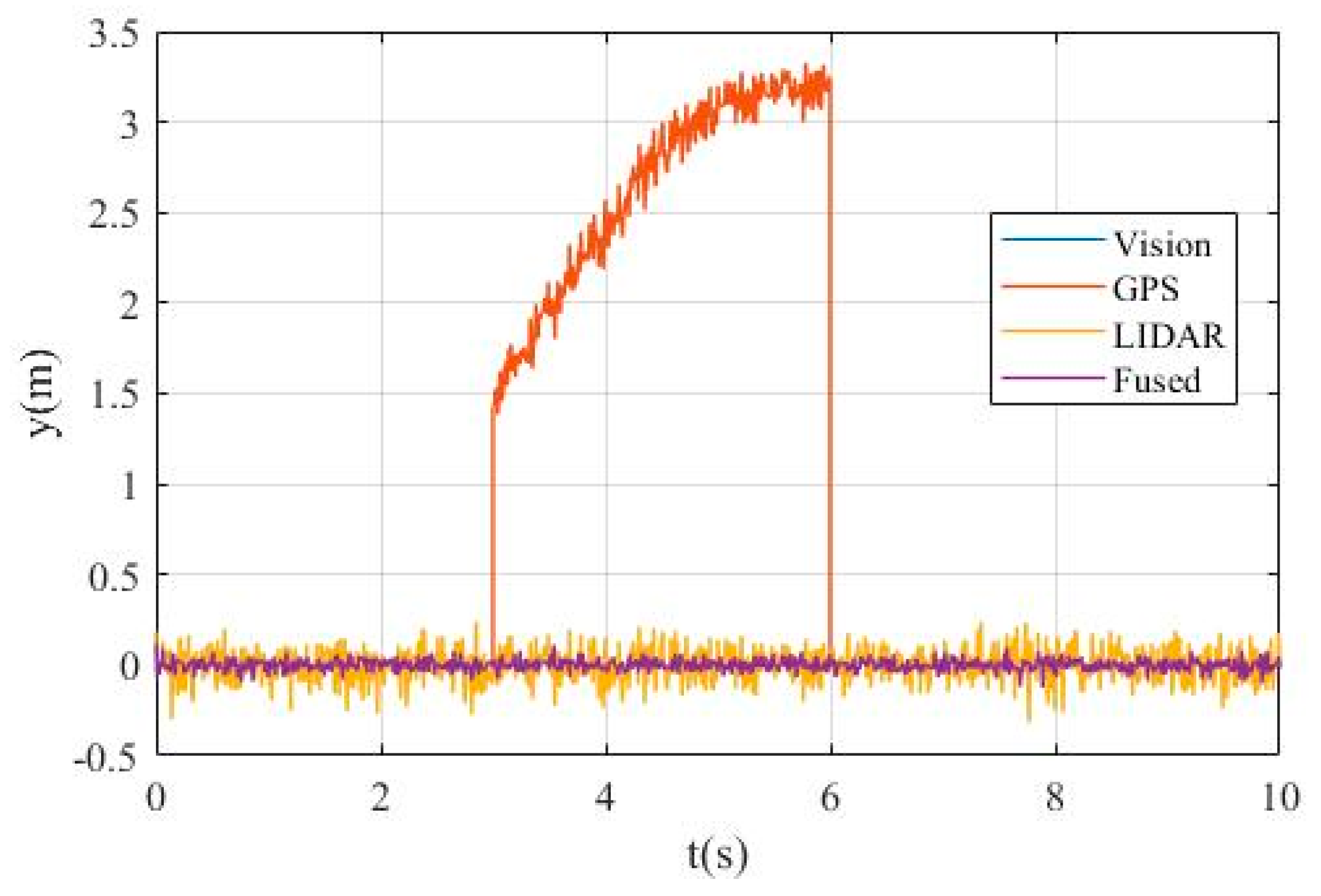
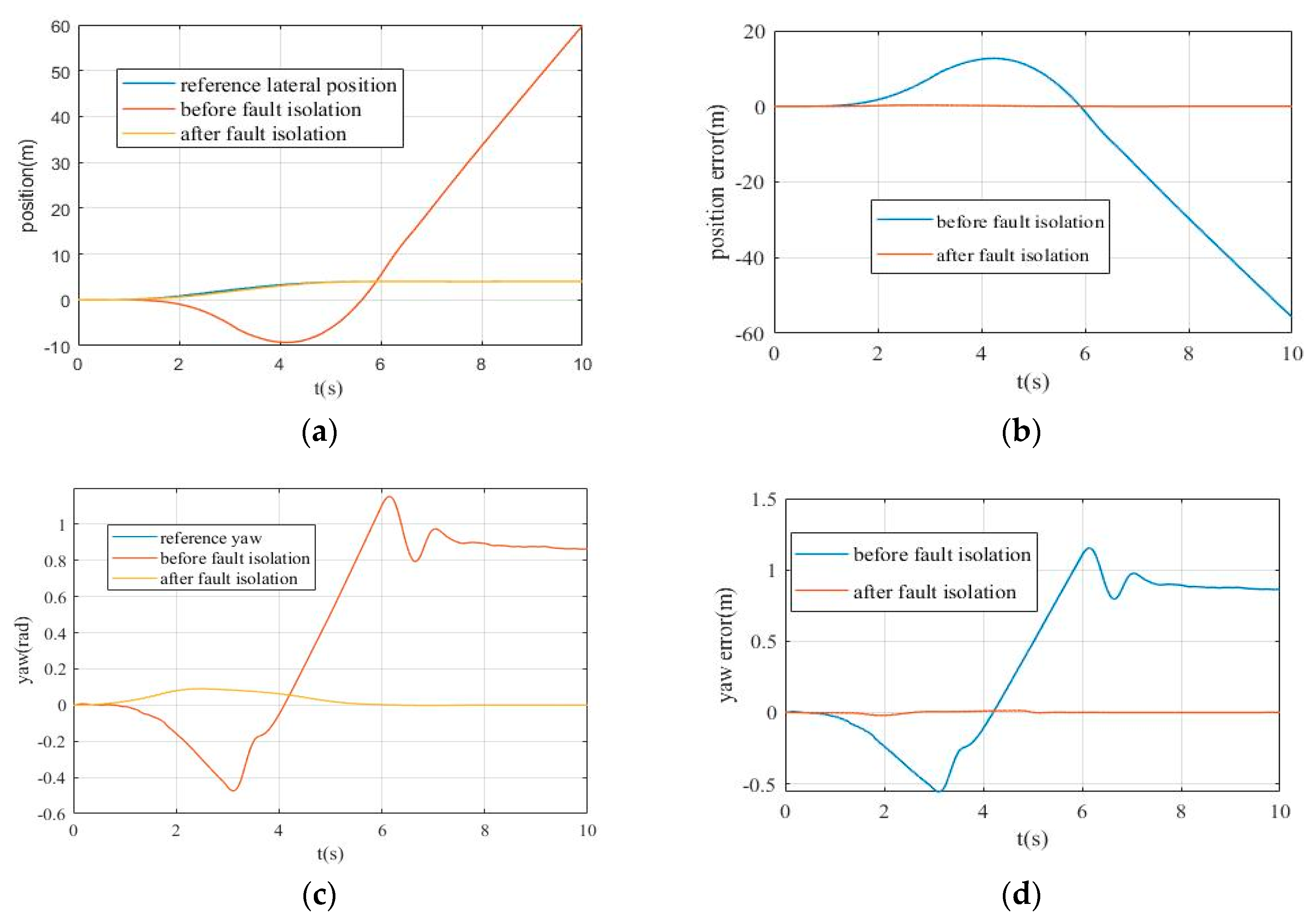
4.2. Effectiveness of the Proposed Method
4.3. Discussion of the Background and Outcomes of Our Work
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xia, Y.; Fan, P.; Li, S.; Yuan, G. Lateral path tracking control of autonomous land vehicle based on ADRC and differential flatness. IEEE Trans. Ind. Electron. 2016, 63, 3091–3099. [Google Scholar] [CrossRef]
- Alessandri, A.; Caccia, M.; Veruggio, G. Fault detection of actuator faults in unmanned underwater vehicles. Control Eng. Pract. 1999, 7, 357–368. [Google Scholar] [CrossRef]
- Heredia, G.; Ollero, A.; Mahtani, R. Detection of Sensor Faults in Autonomous Helicopters. In Proceedings of the IEEE International Conference on Robotics & Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Persis, C.D.; Isidori, A. A geometric approach to nonlinear fault detection and isolation. Autom. Control. IEEE Trans. Autom. Control. 2001, 46, 853–865. [Google Scholar] [CrossRef]
- Patton, R.J.; Frank, P.M.; Clark, R.N. (Eds.) Issues of Fault Diagnosis for Dynamic Systems; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Wang, D.; Wang, W.; Shi, P. Robust fault detection for switched linear systems with state delays. IEEE Trans. Syst. Man Cybern Part B 2009, 39, 800–805. [Google Scholar] [CrossRef] [PubMed]
- Goupil, P.; Marcos, A. The European ADDSAFE project: Industrial and academic efforts towards advanced fault diagnosis. Control Eng. Pract. 2014, 31, 109–125. [Google Scholar] [CrossRef]
- Freeman, P.; Seiler, P.; Balas, G.J. Air data system fault modeling and detection. Control Eng. Pract. 2013, 21, 1290–1301. [Google Scholar] [CrossRef]
- Castaldi, P.; Mimmo, N.; Simani, S. Differential geometry based active fault tolerant control for aircraft. Control Eng. Pract. 2014, 32, 227–235. [Google Scholar] [CrossRef]
- Marzat, J.; Piet-Lahanier, H.; Damongeot, F.; Walter, E. Model-based fault diagnosis for aerospace systems: A survey. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2012, 226, 1329–1360. [Google Scholar] [CrossRef]
- Marzat, J.; Piet-Lahanier, H.; Damongeot, F. Control-based fault detection and isolation for autonomous aircraft. Proc. Inst. Mech. Eng. 2012, 226, 510–531. [Google Scholar] [CrossRef]
- Avram, R.C.; Zhang, X.; Campbell, J. IMU Sensor Fault Diagnosis and Estimation for Quadrotor UAVs. IFAC Pap. 2015, 48, 380–385. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, Q.G.; Yu, L. Fuzzy-model-based fault detection for a class of nonlinear systems with networked measurements. IEEE Trans. Instrum. Meas. 2013, 62, 3148–3159. [Google Scholar] [CrossRef]
- Ballesteros-Moncada, H.; Enrique, J.H.-L.; Juan, A.-M. Fuzzy model-based observers for fault detection in CSTR. ISA Trans. 2015, 59, 325–333. [Google Scholar] [CrossRef] [PubMed]
- Chen, M.; Shi, P.; Lim, C.C. Adaptive Neural Fault-Tolerant Control of a 3-DOF Model Helicopter System. IEEE Trans. Syst. Man Cybern. Syst. 2017, 46, 260–270. [Google Scholar] [CrossRef]
- Baghernezhad, F.; Khorasani, K. Computationally autonomous strategies for robust fault detection, isolation, and identification of mobile robots. Neurocomputing 2016, 171, 335–346. [Google Scholar] [CrossRef]
- Yu, Z.; Qu, Y.; Zhang, Y. Fault-Tolerant Containment Control of Multiple Unmanned Aerial Vehicles Based on Distributed Sliding-Mode Observer. J. Auton. Robot. Syst. Theory Appl. 2019, 93, 163–177. [Google Scholar] [CrossRef]
- Lu, P.; Kampen, E.J.V.; Visser, C.D. Nonlinear aircraft sensor fault reconstruction in the presence of disturbances validated by real flight data. Control Eng. Pract. 2016, 49, 112–128. [Google Scholar] [CrossRef]
- Chamseddine, A.; Noura, H. Control and Sensor Fault Tolerance of Vehicle Active Suspension. IEEE Trans. Control Syst. Technol. 2008, 16, 416–433. [Google Scholar] [CrossRef]
- Kim, W.; Lee, J.; Yoon, S. Development of Mando’s New Continuously Controlled Semi-Active Suspension System; Sae World Congress & Exhibition: Detroit, MI, USA, 2005. [Google Scholar]
- Isermann, R.M.; Schmitt, M. A Sensor and Process Fault Detection System for Vehicle Suspension Systems; Sae World Congress & Exhibition: Detroit, MI, USA, 2002. [Google Scholar]
- Sébastien, V.; Morales-Menendez, R.; Lozoya-Santos, D.J. Fault Detection in Automotive Semi-Active Suspension: Experimental Results. In Proceedings of the SAE 2013 World Congress & Exhibition, Detroit, MI, USA, 16–18 April 2013. [Google Scholar]
- Svendenius, J.; Gäfvert, M. A Semi-Empirical Tire-Model for Transient Combined-Slip Forces. Veh. Syst. Dyn. 2006, 44, 189–208. [Google Scholar] [CrossRef]
- Kristian, H.; Florian, B.; Klaus, A. Extending the Magic Formula Tire Model for Large Inflation Pressure Changes by Using Measurement Data from a Corner Module Test Rig. SAE Int. J. Passeng. Cars Mech. Syst. 2018, 11, 103–117. [Google Scholar]
- Wu, J.Y.; Wang, Z.P.; Zhao, Z. Influence of Tire Inflation Pressure on Vehicle Dynamics and Compensation Control on FWID Electric Vehicles. J. Dyn. Syst. Meas. Control Trans. ASME 2020, 142, 071001. [Google Scholar] [CrossRef]
- Feng, Y.; Chao, Y.; Xing, L. Experimental Evaluation on Depth Control Using Improved Model Predictive Control for Autonomous Underwater Vehicle (AUVs). Sensors 2018, 18, 2321–2340. [Google Scholar]
- Shi, X.; Gao, J.; Lu, Y. Simulation of Disturbance Recovery Based on MPC and Whole-Body Dynamics Control of Biped Walking. Sensors 2020, 20, 2971. [Google Scholar] [CrossRef] [PubMed]
- Linben, L.; Zigang, L.I.; Chaoying, C. Optimal weight distribution principle used in the fusion of multi-sensor data. J. Chin. Inert. Technol. 2000, 8, 36–39. [Google Scholar]
- Da, R. Failure detection of dynamical systems with the state chi-square test. J. Guid. Control Dyn. 1994, 17, 271–277. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Dimension |
|---|---|---|
| Number of lanes: | 2 | |
| Lane width: | 4 | m |
| Lane length | 127 | m |
| Mass of car: | 1575 | kg |
| Moment of inertia | 2875 | kg.m2 |
| Length of car | 4.7 | m |
| Width of car | 1.8 | m |
| Height of car | 1.4 | m |
| Front overhang | 0.9 | |
| Rear overhang | 1 | |
| Longitudinal speed | 15 | km/h |
| Sampling time interval | 0.01 | s |
| The process noise covariance matrix | diag [0.001,0.001,0.001,.0.002] | |
| The measurement noise | 0.001 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geng, K.; Chulin, N.A.; Wang, Z. Fault-Tolerant Model Predictive Control Algorithm for Path Tracking of Autonomous Vehicle. Sensors 2020, 20, 4245. https://doi.org/10.3390/s20154245
Geng K, Chulin NA, Wang Z. Fault-Tolerant Model Predictive Control Algorithm for Path Tracking of Autonomous Vehicle. Sensors. 2020; 20(15):4245. https://doi.org/10.3390/s20154245
Chicago/Turabian StyleGeng, Keke, Nikolai Alexandrovich Chulin, and Ziwei Wang. 2020. "Fault-Tolerant Model Predictive Control Algorithm for Path Tracking of Autonomous Vehicle" Sensors 20, no. 15: 4245. https://doi.org/10.3390/s20154245
APA StyleGeng, K., Chulin, N. A., & Wang, Z. (2020). Fault-Tolerant Model Predictive Control Algorithm for Path Tracking of Autonomous Vehicle. Sensors, 20(15), 4245. https://doi.org/10.3390/s20154245