Pavement Crack Detection from Mobile Laser Scanning Point Clouds Using a Time Grid



Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Methods
2.3. Construction of a Tgrid for MLS Point Clouds
2.4. Detection of Road Surface Points and Crack Candidates
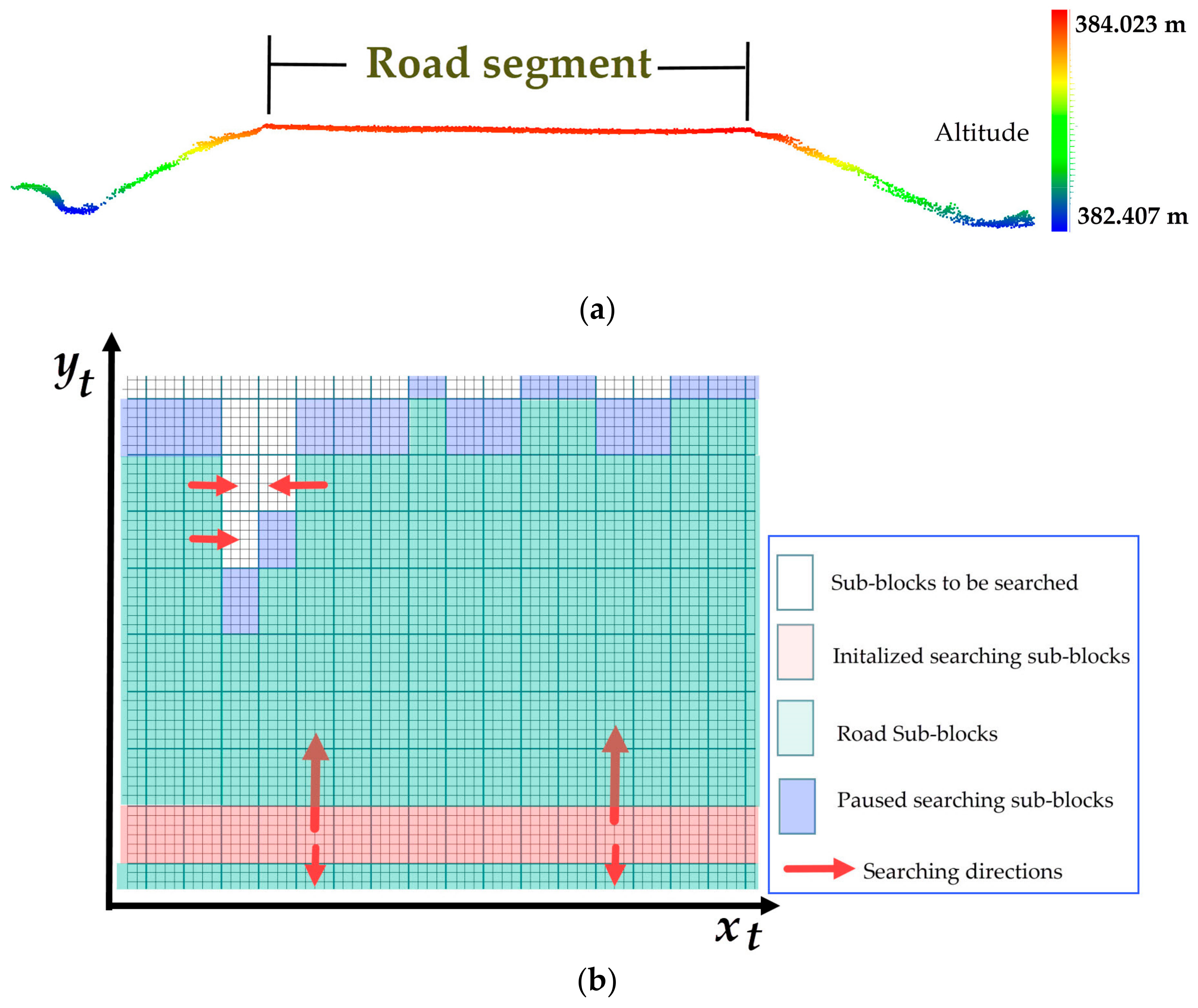
2.4.1. Detection of Road Surface Points
- (1)
- Set an initialized searching sub-block, P0, where trajectory data are located, and calculate the statistical variance, σ02, of the point altitudes within it.
- (2)
- Search forward to find the road boundary area along the direction of xt, yt, and the opposite xt and opposite yt, until a sub-block (shown in blue) that passes the test is found. Pause searching.
- (3)
- Iterate for all trajectory points until all road boundary areas are beside each other.
- (4)
- Filter the non-road points in the road boundary area (shown in blue) and its closed road surface neighbors (the closed sub-block shown in green) using a height threshold, hth, to the local road plane.
- (5)
- Extract the complete road surface by finding the largest connected region in the Tgrid.
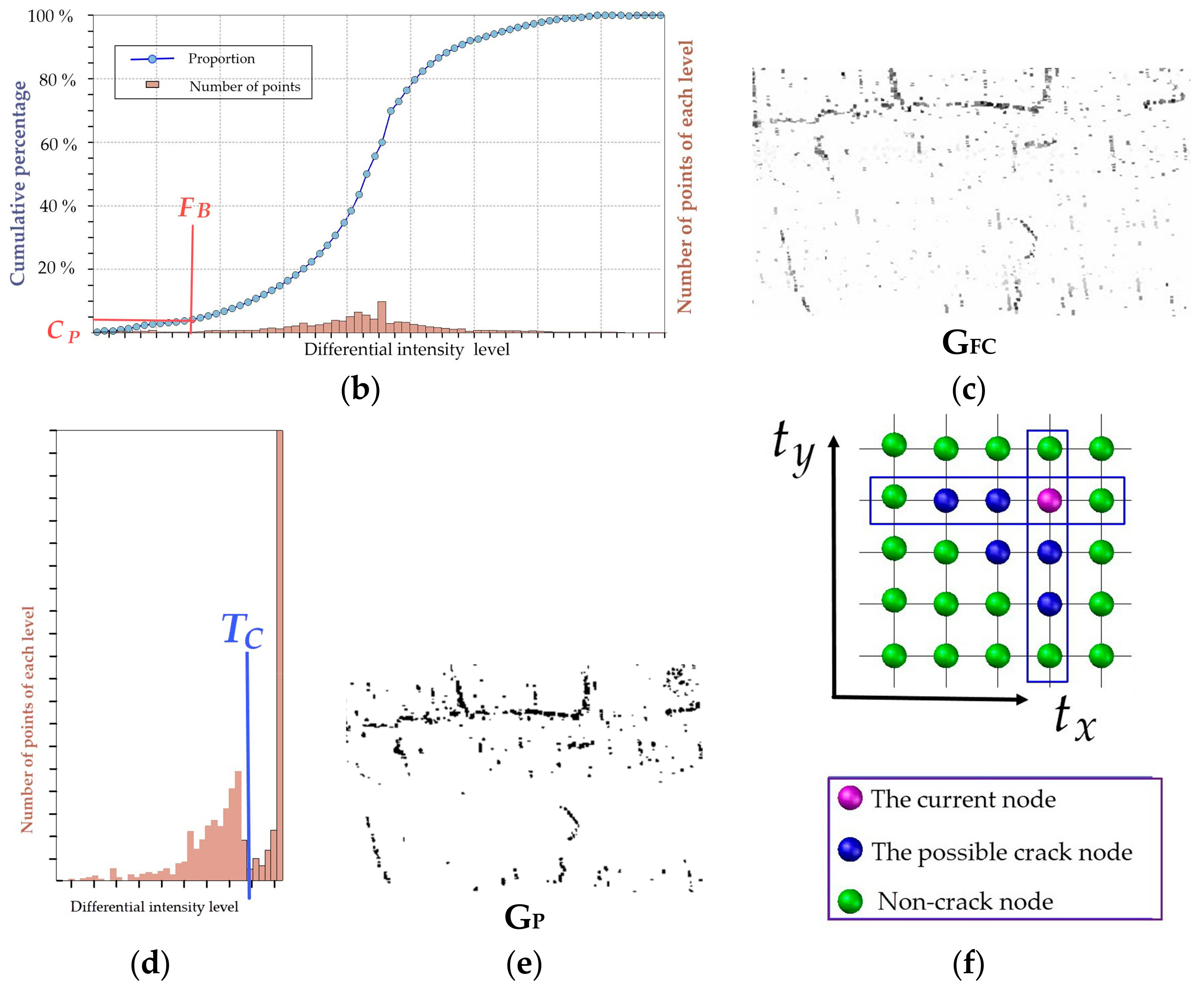
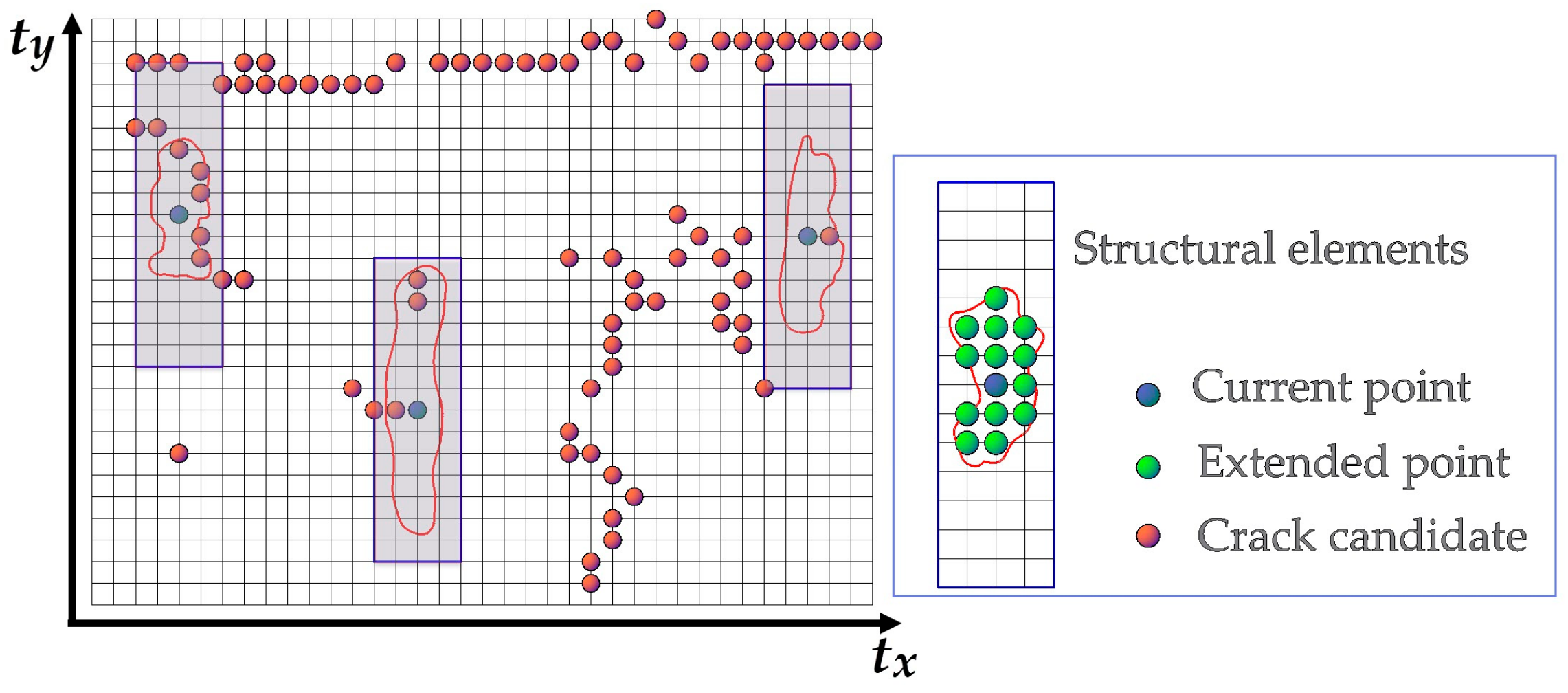
2.4.2. Detection of Crack Candidates
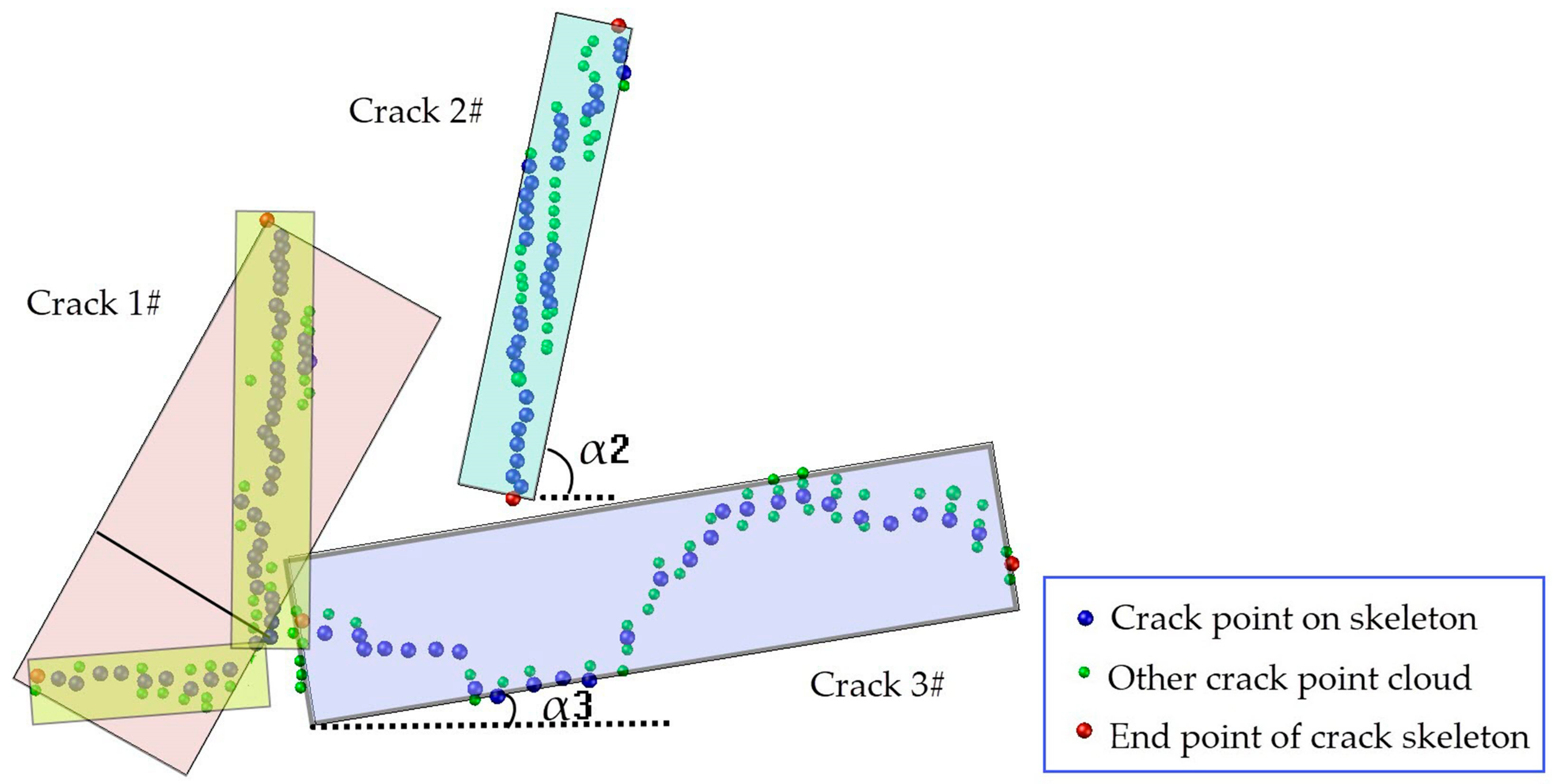
2.5. Generation of the Crack Skeleton and Calculation of Crack-Shape Parameters
2.5.1. Generation of the Crack Skeleton
2.5.2. Calculation of Crack-Shape Parameters
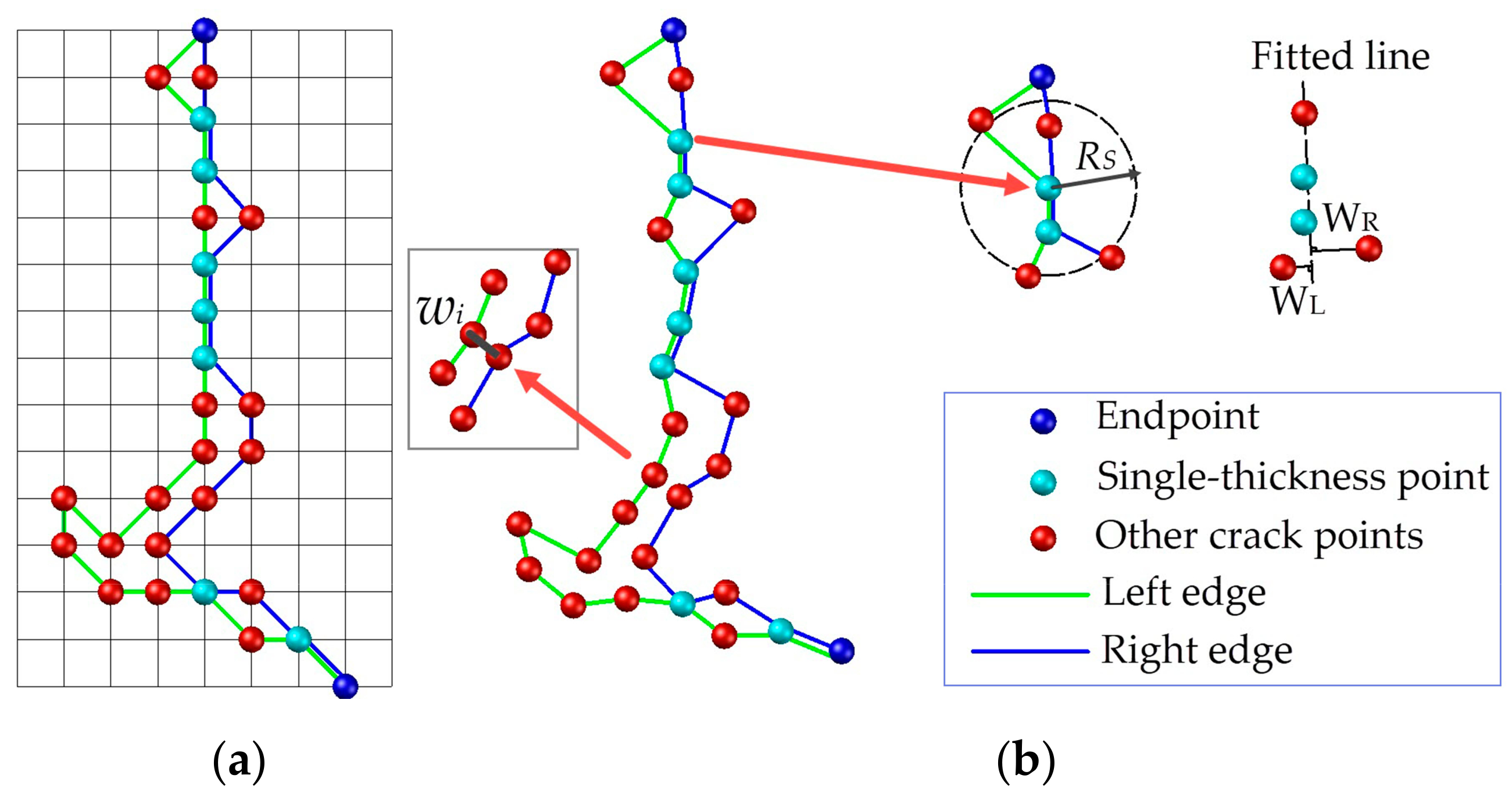
- In the Tgrid, the Freeman chain code is used to track the edge of the crack connection area. The closed edge curve is disconnected from the endpoint of the skeleton to split the edge into the left and right borders (Figure 11a).
- The edge points shared by the left and right borders are searched and marked as single-point-thickness edge points. In the above method, wi = max (wiL, wiR) is adopted to calculate the related crack width (Figure 11b), while other edge points use Equation (8).
- Output the average width of all edge points to measure the severity of the cracks. The maximum width of the crack and its corresponding location, Pm(i, j, X, Y, Z, T, I), serve as the supplementary information.
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Koch, C.; Georgieva, K.; Kasireddy, V.; Akinci, B.; Fieguth, P. A review on computer vision based defect detection and condition assessment of concrete and asphalt civil infrastructure. Adv. Eng. Inform. 2015, 29, 196–210. [Google Scholar] [CrossRef]
- Weng, X.; Huang, Y.; Wang, W. Segment-based pavement crack quantification. Autom. Constr. 2019, 105, 102819. [Google Scholar] [CrossRef]
- Hoang, N.D.; Nguyen, Q.L.; Tran, V.D. Automatic recognition of asphalt pavement cracks using metaheuristic optimized edge detection algorithms and convolution neural network. Autom. Constr. 2018, 94, 203–213. [Google Scholar]
- Yousaf, M.H.; Azhar, K.; Murtaza, F.; Hussain, F. Visual analysis of asphalt pavement for detection and localization of potholes. Adv. Eng. Inform. 2018, 38, 527–537. [Google Scholar] [CrossRef]
- Kim, J.; Lee, H.D. Development of New Automated Crack Measurement Algorithm to Analyze Laser Images of Pavement Surface. Diss. Theses Gradworks 2009, 112, 1231–1236. [Google Scholar]
- Jahanshahi, M.R.; Jazizadeh, F.; Masri, S.F.; Becerik-Gerber, B. Unsupervised Approach for Autonomous Pavement-Defect Detection and Quantification Using an Inexpensive Depth Sensor. J. Comput. Civ. Eng. 2013, 27, 743–754. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, X.; Li, F.; Sun, L. Detection of Crack Growth in Asphalt Pavement Through Use of Infrared Imaging. Transp. Res. Rec. J. Transp. Res. Board 2017, 2645, 24–31. [Google Scholar] [CrossRef]
- Radopoulou, S.C.; Brilakis, I. Automated Detection of Multiple Pavement Defects. J. Comput. Civ. Eng. 2017, 31, 04016057. [Google Scholar] [CrossRef]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. Comparison of deep convolutional neural networks and edge detectors for image-based crack detection in concrete. Constr. Build. Mater. 2018, 186, 1031–1045. [Google Scholar] [CrossRef]
- Fan, Z.; Li, C.; Chen, Y.; di Mascio, P.; Chen, X.; Zhu, G.; Loprencipe, G. Ensemble of Deep Convolutional Neural Networks for Automatic Pavement Crack Detection and Measurement. Coatings 2020, 10, 152. [Google Scholar] [CrossRef]
- Jeong, J.-H.; Jo, H.; Ditzler, G. Convolutional neural networks for pavement roughness assessment using calibration-free vehicle dynamics. Comput. Aided Civ. Infrastruct. Eng. 2020. [Google Scholar] [CrossRef]
- Ju, H.; Li, W.; Tighe, S.; Xu, Z.; Zhai, J. CrackU-net: A novel deep convolutional neural network for pixelwise pavement crack detection. Struct. Control. Heal. Monit. 2020, e2551. [Google Scholar] [CrossRef]
- Kalfarisi, R.; Wu, Z.Y.; Soh, K. Crack Detection and Segmentation Using Deep Learning with 3D Reality Mesh Model for Quantitative Assessment and Integrated Visualization. J. Comput. Civ. Eng. 2020, 34, 04020010. [Google Scholar] [CrossRef]
- Mei, Q.; Gul, M.; Azim, M.R. Densely connected deep neural network considering connectivity of pixels for automatic crack detection. Autom. Constr. 2020, 110, 103018. [Google Scholar] [CrossRef]
- Yang, F.; Zhang, L.; Yu, S.; Prokhorov, D.; Mei, X.; Ling, H. Feature Pyramid and Hierarchical Boosting Network for Pavement Crack Detection. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1525–1535. [Google Scholar] [CrossRef]
- Hadjidemetriou, G.M.; Christodoulou, S.E. Vision-and Entropy-Based Detection of Distressed Areas for Integrated Pavement Condition Assessment. J. Comput. Civ. Eng. 2019, 33, 04019020. [Google Scholar] [CrossRef]
- Cha, Y.-J.; Choi, W.; Suh, G.; Mahmoudkhani, S.; Büyükztürk, O. Autonomous Structural Visual Inspection Using Region-Based Deep Learning for Detecting Multiple Damage Types. Comput. Aided Civ. Infrastruct. Eng. 2017. [Google Scholar] [CrossRef]
- Gopalakrishnan, K.; Khaitan, S.K.; Choudhary, A.; Agrawal, A. Deep Convolutional Neural Networks with transfer learning for computer vision-based data-driven pavement distress detection. Constr. Build. Mater. 2017, 157, 322–330. [Google Scholar] [CrossRef]
- Cha, Y.J.; Choi, W.; Buyukozturk, O. Deep Learning-Based Crack Damage Detection Using Convolutional Neural Networks. Comput. Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Zhang, D.; Zou, Q.; Lin, H.; Xu, X.; He, L.; Gui, R.; Li, Q. Automatic pavement defect detection using 3D laser profiling technology. Autom. Constr. 2018, 96, 350–365. [Google Scholar] [CrossRef]
- Tsai, Y.-C.; Wu, Y.-C.; Price, G. A Cost-Effective and Objective Full-Depth Patching Identification Method using 3D Sensing Technology with Automated Crack Detection and Classification. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 50–58. [Google Scholar] [CrossRef]
- Pavement crack image acquisition methods and crack extraction algorithms: A review. J. Traffic Transp. Eng. 2019, 6, 535–556.
- Gui, R.; Xu, X.; Zhang, D.; Pu, F. Object-Based Crack Detection and Attribute Extraction From Laser-Scanning 3D Profile Data. IEEE Access 2019, 7, 172728–172743. [Google Scholar] [CrossRef]
- Xu, Z.-G.; Chen, Y.-L.; Li, J.-L.; Zhao, X.-M.; Pan, Y.; Wang, Z.-R.; Wei, N.; Song, H.-X. Research progress on automatic image processing technology for pavement distress. J. Traffic Transp. Eng. 2019, 19, 172–190. [Google Scholar]
- Li, L.; Wang, K.C.P. Bounding Box-Based Technique for Pavement Crack Classification and Measurement Using 1 mm 3D Laser Data. J. Comput. Civ. Eng. 2016, 30, 04016011. [Google Scholar] [CrossRef]
- Tsai, Y.C.J.; Li, F. Critical Assessment of Detecting Asphalt Pavement Cracks under Different Lighting and Low Intensity Contrast Conditions Using Emerging 3D Laser Technology. J. Transp. Eng. 2012, 138, 649–656. [Google Scholar] [CrossRef]
- Woo, S.; Yeo, H. Optimization of Pavement Inspection Schedule with Traffic Demand Prediction. Procedia Soc. Behav. Sci. 2016, 218, 95–103. [Google Scholar] [CrossRef]
- Chen, K.; Cheng, M.; Zhou, M.; Chen, X.; Chen, Y.; Jonathan, L.; Nie, H. Automated Object Extraction from MLS Data: A Survey. In Proceedings of the 2015 10th International Conference on Intelligent Systems and Knowledge Engineering, Taipei, Taiwan, 24–27 November 2015; pp. 331–334. [Google Scholar]
- Zhang, Z.; Cheng, M.; Chen, X.; Zhou, M.; Chen, Y.; Li, J.; Nie, H. Turning Mobile Laser Scanning Points Into 2d/3d On-Road Object Models: Current Status. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 3524–3527. [Google Scholar]
- Guan, H.; Li, J.; Yu, Y.; Chapman, M.; Wang, H.; Wang, C.; Zhai, R. Iterative Tensor Voting for Pavement Crack Extraction Using Mobile Laser Scanning Data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1527–1537. [Google Scholar] [CrossRef]
- Guan, H.; Li, J.; Yu, Y.; Chapman, M.; Wang, C. Automated Road Information Extraction From Mobile Laser Scanning Data. IEEE Trans. Intell. Transp. Syst. 2015, 16, 194–205. [Google Scholar] [CrossRef]
- Chen, X.; Li, J. A Feasibility Study On Use Of Generic Mobile Laser Scanning System for Detecting Asphalt Pavement Cracks. In Proceedings of the XXIII Isprs Congress, Prague, Czech Republic, 12–19 July 2016; pp. 545–549. [Google Scholar]
- Yongtao, Y.; Li, J.; Haiyan, G.; Cheng, W. 3D crack skeleton extraction from mobile LiDAR point clouds. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Québec City, QC, Canada, 13–18 July 2014. [Google Scholar]
- Zhong, M.; Sui, L.; Wang, Z.; Yang, X.; Zhang, C.; Chen, N. Recovering Missing Trajectory Data for Mobile Laser Scanning Systems. Remote Sens. 2020, 12, 899. [Google Scholar] [CrossRef]
- Wang, H.; Cai, Z.; Luo, H.; Cheng, W.; Li, J. Automatic road extraction from mobile laser scanning data. In Proceedings of the International Conference on Computer Vision in Remote Sensing, Xiamen, China, 16–18 December 2012. [Google Scholar]
- Wei, C.; Lichun, S.; Zhengchao, X.; Yu, L. Improved Zhang-Suen thinning algorithm in binary line drawing applications. In Proceedings of the 2012 International Conference on Systems and Informatics (ICSAI 2012), Yantai, China, 19–21 May 2012; pp. 1947–1950. [Google Scholar] [CrossRef]
- Yun, H.B.; Mokhtari, S.; Wu, L.L. Crack Recognition and Segmentation Using Morphological Image-Processing Techniques for Flexible Pavements. Transp. Res. Rec. J. Transp. Res. Board 2015, 2523, 115–124. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values | Parameters | Values |
|---|---|---|---|---|---|
| WD (m) | 0.50 | vth (°) | 10 | Rlwth | 3 |
| α | 0.05 | CP (%) | 5 | Rs (m) | 0.20 |
| hth (m) | 0.03 | D2 (m) | 0.04 | ||
| hd (m) | 0.20 | Lth1 (m) | 0.25 |
| Crack Type | Actual Quantity | Precision(P) | Recall (R) | F1-Measure |
|---|---|---|---|---|
| Transverse crack | 98 | 95.15% | 98.00% | 96.55% |
| Longitudinal crack | 47 | 97.91% | 78.43% | 87.09% |
| Oblique crack | 42 | 84.62% | 78.57% | 81.48% |
| Crack Type | Number of Samples | Mean (CW) | Variance (VW) | Mean (CL) | Variance (VL) |
|---|---|---|---|---|---|
| Transverse crack | 20 | 0.812 | 0.149 | 0.921 | 0.066 |
| Longitudinal crack | 20 | 0.910 | 0.071 | 0.935 | 0.089 |
| Oblique crack | 20 | 0.874 | 0.131 | 0.897 | 0.076 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, M.; Sui, L.; Wang, Z.; Hu, D. Pavement Crack Detection from Mobile Laser Scanning Point Clouds Using a Time Grid. Sensors 2020, 20, 4198. https://doi.org/10.3390/s20154198
Zhong M, Sui L, Wang Z, Hu D. Pavement Crack Detection from Mobile Laser Scanning Point Clouds Using a Time Grid. Sensors. 2020; 20(15):4198. https://doi.org/10.3390/s20154198
Chicago/Turabian StyleZhong, Mianqing, Lichun Sui, Zhihua Wang, and Dongming Hu. 2020. "Pavement Crack Detection from Mobile Laser Scanning Point Clouds Using a Time Grid" Sensors 20, no. 15: 4198. https://doi.org/10.3390/s20154198
APA StyleZhong, M., Sui, L., Wang, Z., & Hu, D. (2020). Pavement Crack Detection from Mobile Laser Scanning Point Clouds Using a Time Grid. Sensors, 20(15), 4198. https://doi.org/10.3390/s20154198