Detection and Classification of Multirotor Drones in Radar Sensor Networks: A Review




Abstract
1. Introduction
- UAVs can be correctly identified only at very short distances. Effective surveillance systems must be able to react and take the appropriate countermeasures promptly, also in adverse operating conditions such as low visibility, propagation environments full of obstacles, etc.
- Major security threats can arise from UAVs approaching in swarms. The adopted technologies should be able to detect multiple targets simultaneously and to track their trajectories in real-time.
- UAVs cannot be easily distinguished from other small flying objects such as birds. Advanced signal processing algorithms are then needed in order to lower the probability of false alarm and increase the correct detection rate.
2. Basic Theory for Radar Signal Processing
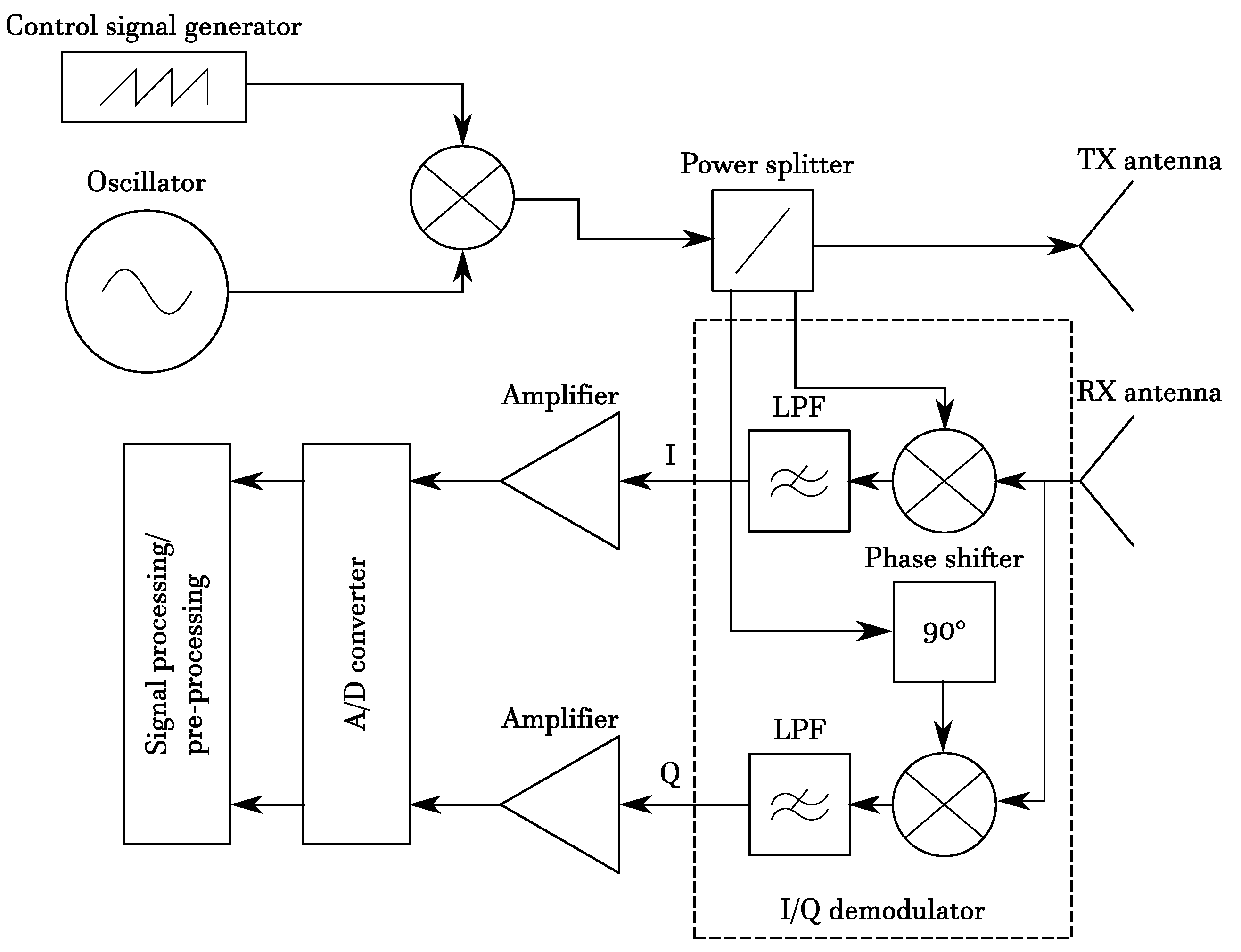
2.1. Radar Sensor
2.2. Moving Target Indicator (MTI)
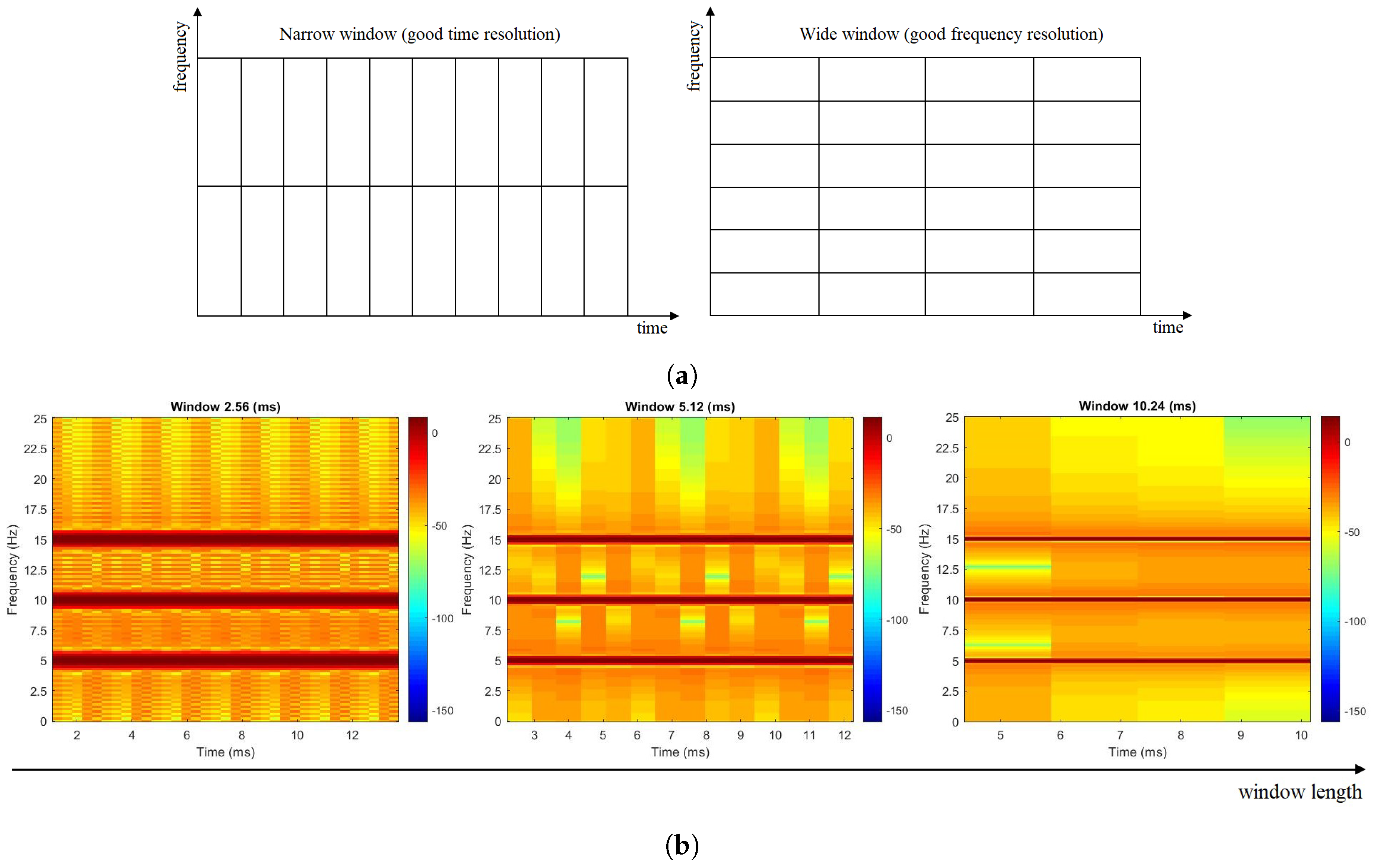
2.3. Features Extraction Techniques
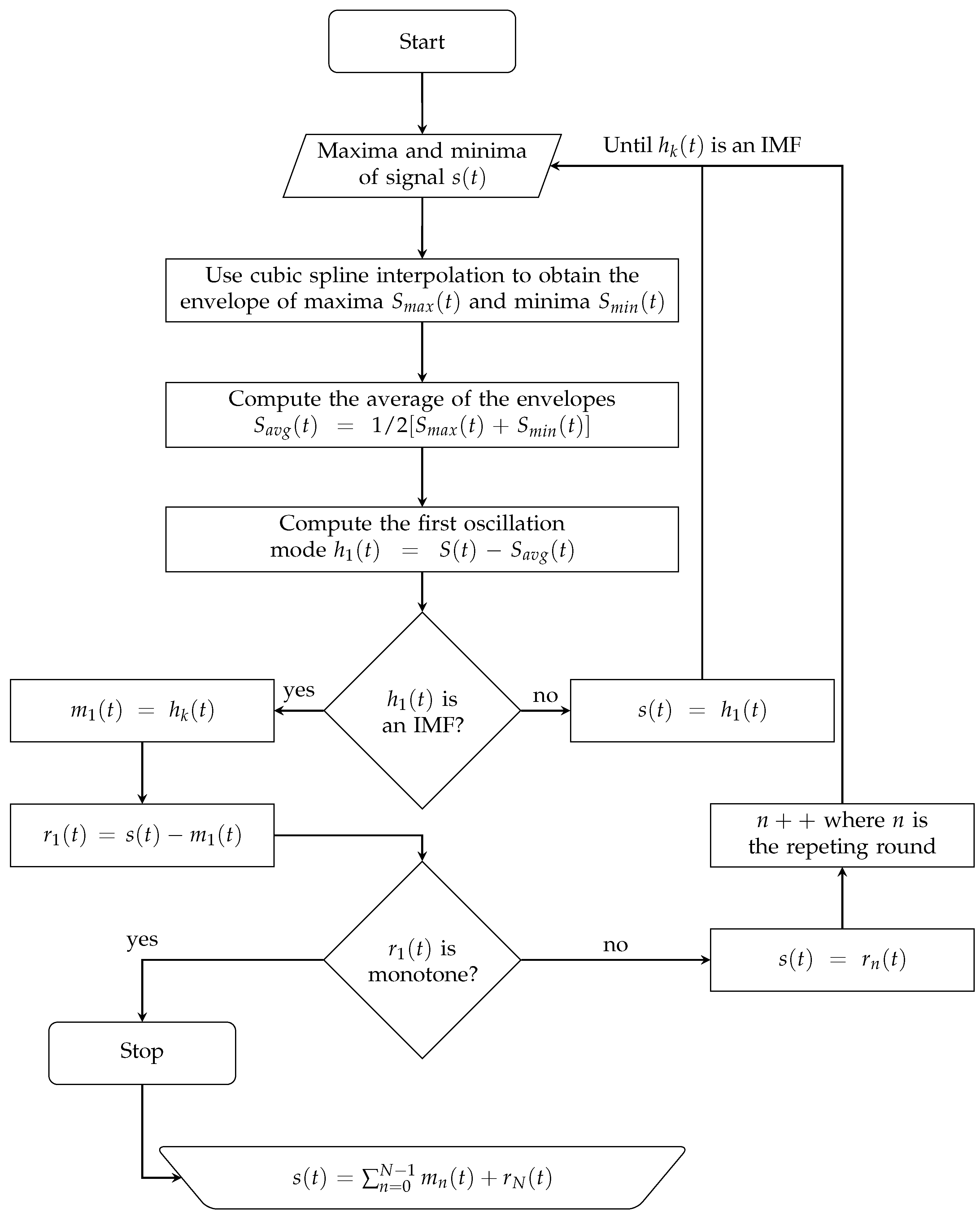
2.4. Empirical Mode Decomposition (EMD)
- The number of local extrema differs from the number of zero-crossings at most by one;
- The average of the envelope shall be zero.
2.5. Hardware Limitations and I/Q Imbalance
3. Literature on Drone Detection
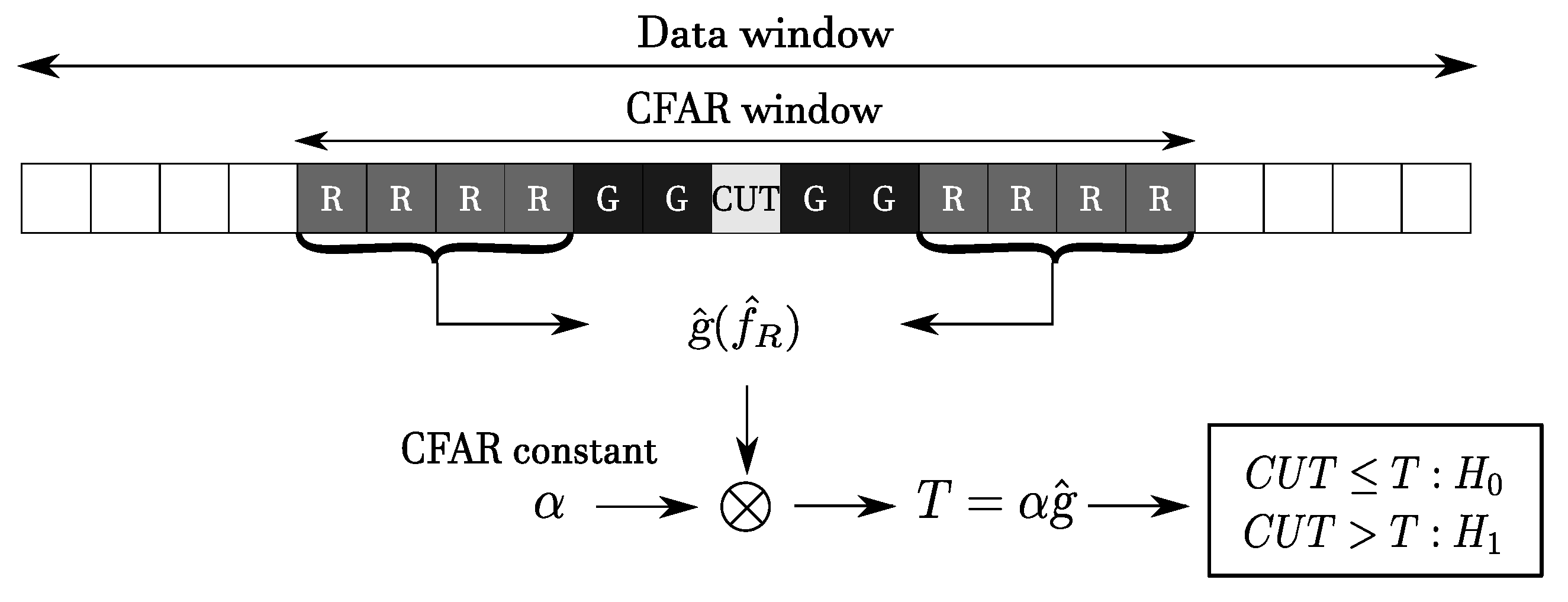
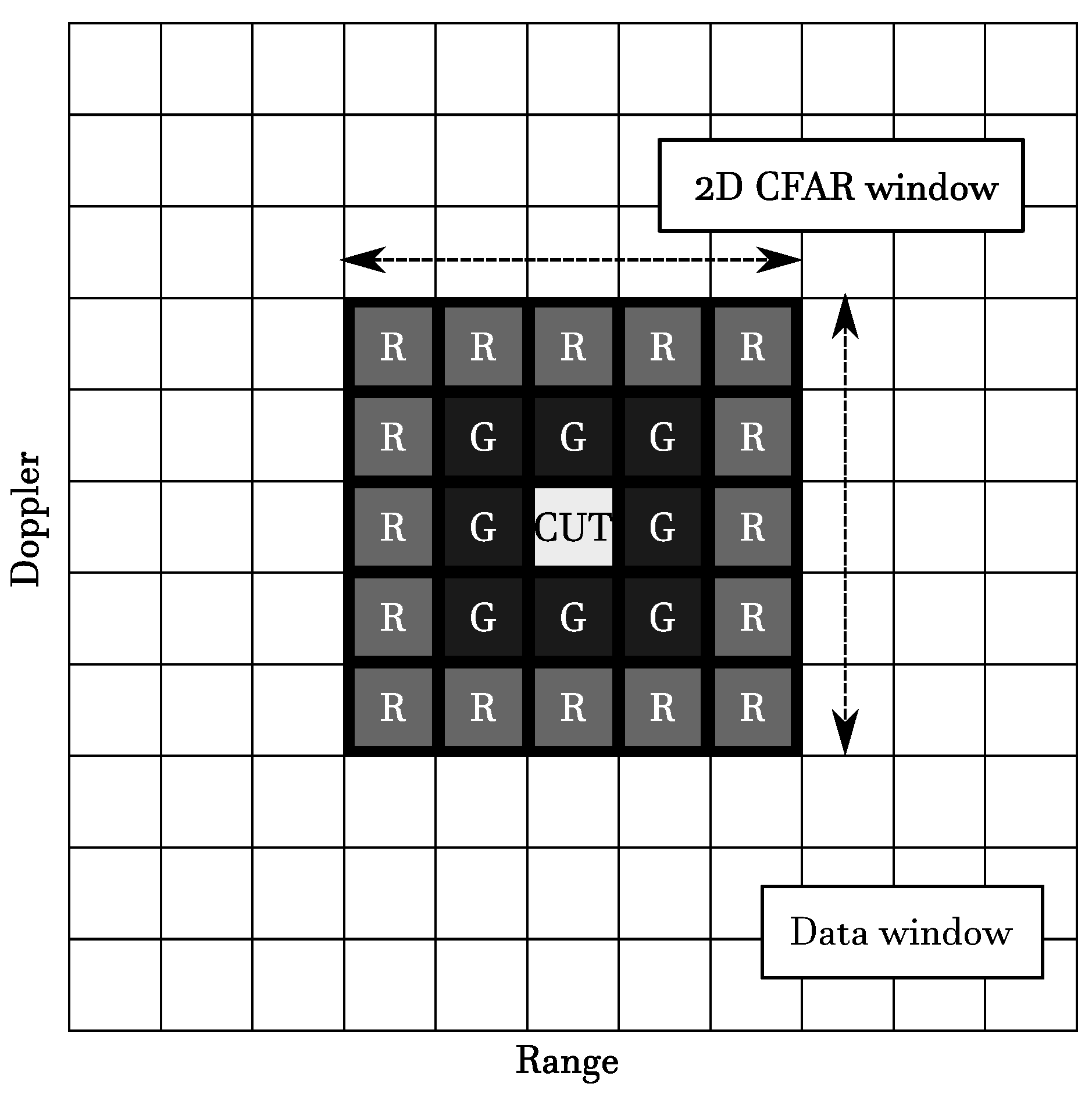
3.1. Constant False Alarm Rate (CFAR)
3.2. Radar Detection Approaches
4. Literature on Drone Verification and Classification
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CA-CFAR | Cell Averaging CFAR |
| CFAR | Constant False Alarm Rate |
| CNN | Convolutional Neural Network |
| COTS | Commercial-Off-The-Shelf |
| CVD | Cadence Velocity Diagram |
| CW | Continuous Wave |
| DAR | Digital Array Radar |
| DFM | Doppler Frequency Migration |
| DOA | Direction Of Arrival |
| EMD | Empirical Mode Decomposition |
| FFT | Fast Fourier Transform |
| FIR | Finite Impulse Response |
| FMCW | Frequency Modulated Continuous Wave |
| GPS | Global Positioning System |
| IID | Independent and Identically Distributed |
| IMF | Intrinsic Mode Function |
| KNN | K-Nearest Neighbor |
| LFMCW | Linear Frequency Modulated Continuous Wave |
| MTI | Moving Target Indicator |
| NB | Naive Bayes |
| OS-CFAR | Order Statistics CFAR |
| PCA | Principal Component Analysis |
| PD | Probability of Detection |
| Probability density Function | |
| PFA | Probability of False Alarm |
| RCS | Radar Cross Section |
| RF | Radio Frequency |
| RM | Range Migration |
| SDR | Software Defined Radio |
| SNR | Signal-to-Noise-Ratio |
| SOCA-CFAR | Smallest of CA-CFAR |
| STFT | Short Time Fourier Transform |
| SVD | Singular Value Decomposition |
| SVM | Support Vector Machine |
| UAV | Unmanned Aerial Vehicle |
References
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles; Springer Publishing Company: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Kim, H.; Mokdad, L.; Ben-Othman, J. Designing UAV Surveillance Frameworks for Smart City and Extensive Ocean with Differential Perspectives. IEEE Commun. Mag. 2018, 56, 98–104. [Google Scholar] [CrossRef]
- Câmara, D. Cavalry to the rescue: Drones fleet to help rescuers operations over disasters scenarios. In Proceedings of the 2014 IEEE Conference on Antenna Measurements Applications (CAMA), Antibes, France, 16–19 November 2014. [Google Scholar]
- Elloumi, M.; Dhaou, R.; Escrig, B.; Idoudi, H.; Saidane, L.A. Monitoring road traffic with a UAV-based system. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018. [Google Scholar]
- Tokekar, P.; Hook, J.V.; Mulla, D.; Isler, V. Sensor Planning for a Symbiotic UAV and UGV System for Precision Agriculture. IEEE Trans. Robot. 2016, 32, 1498–1511. [Google Scholar] [CrossRef]
- Gurtner, A.; Greer, D.G.; Glassock, R.; Mejias, L.; Walker, R.A.; Boles, W.W. Investigation of Fish-Eye Lenses for Small-UAV Aerial Photography. IEEE Trans. Geosci. Remote. Sens. 2009, 47, 709–721. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Humphreys, T. Statement on the Security Threat Posed by Unmanned Aerial Systems and Possible Countermeasures; Technical Peport; The University of Texas at Austin: Austin, TX, USA, 2015. [Google Scholar]
- Aubry, M. Drone Drug Drops Common at Quebec Jails: Guards. 2013. Available online: http://www.winnipegsun.com/2013/11/27/drone-drug-drops-common-at-quebec-jails-guards (accessed on 31 May 2020).
- Anderson, B. How Drones Help Smuggle Drugs Into Prison. 2014. Available online: http://motherboard.vice.com/read/how-drones-help-smuggle-drugs-into-prison (accessed on 31 May 2020).
- Yutim, H. DCA Lodges Police Report Over Prohibited Flying Drone Near KLIA. 2015. Available online: http://english.astroawani.com/malaysia-news/dca-lodges-police-report-over-prohibited-flying-drone-near-klia-54955 (accessed on 31 May 2020).
- Gittleson, K. Data-Stealing Snoopy Drone Unveiled at Black Hat. 2014. Available online: http://www.bbc.com/news/technology-26762198 (accessed on 31 May 2020).
- Coluccia, A.; Fascista, A.; Ricci, G. Online Estimation and Smoothing of a Target Trajectory in Mixed Stationary/moving Conditions. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019. [Google Scholar]
- De Cubber, G.; Shalom, R.; Coluccia, E.A. The SafeShore system for the detection of threat agents in a maritime border environment. In Proceedings of the IARP Workshop on Risky Interventions and Environmental Surveillance, Les Bon Villers, Belgium, 18–19 May 2017. [Google Scholar]
- Coluccia, A.; Ghenescu, M.; Piatrik, T.; De Cubber, G.; Schumann, A.; Sommer, L.; Klatte, J.; Schuchert, T.; Beyerer, J.; Farhadi, M.; et al. Drone-vs-Bird detection challenge at IEEE AVSS2017. In Proceedings of the 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017. [Google Scholar]
- Coluccia, A.; Fascista, A.; Schumann, A.; Sommer, L.; Ghenescu, M.; Piatrik, T.; De Cubber, G.; Nalamati, M.; Kapoor, A.; Saqib, M.; et al. Drone-vs-Bird Detection Challenge at IEEE AVSS2019. In Proceedings of the 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Taipei, Taiwan, 18–21 September 2019. [Google Scholar]
- Aker, C.; Kalkan, S. Using deep networks for drone detection. In Proceedings of the 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017. [Google Scholar]
- Schumann, A.; Sommer, L.; Klatte, J.; Schuchert, T.; Beyerer, J. Deep cross-domain flying object classification for robust UAV detection. In Proceedings of the 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017. [Google Scholar]
- Taha, B.; Shoufan, A. Machine Learning-Based Drone Detection and Classification: State-of-the-Art in Research. IEEE Access 2019, 7, 138669–138682. [Google Scholar] [CrossRef]
- Anwar, M.Z.; Kaleem, Z.; Jamalipour, A. Machine Learning Inspired Sound-Based Amateur Drone Detection for Public Safety Applications. IEEE Trans. Veh. Technol. 2019, 2526–2534. [Google Scholar] [CrossRef]
- Shi, Z.; Chang, X.; Yang, C.; Wu, Z.; Wu, J. An Acoustic-Based Surveillance System for Amateur Drones Detection and Localization. IEEE Trans. Veh. Technol. 2020, 69, 2731–2739. [Google Scholar] [CrossRef]
- Shi, X.; Yang, C.; Xie, W.; Liang, C.; Shi, Z.; Chen, J. Anti-Drone System with Multiple Surveillance Technologies: Architecture, Implementation, and Challenges. IEEE Commun. Mag. 2018, 56, 68–74. [Google Scholar] [CrossRef]
- Guvenc, I.; Koohifar, F.; Singh, S.; Sichitiu, M.L.; Matolak, D. Detection, Tracking, and Interdiction for Amateur Drones. IEEE Commun. Mag. 2018, 56, 75–81. [Google Scholar] [CrossRef]
- Bisio, I.; Garibotto, C.; Lavagetto, F.; Sciarrone, A.; Zappatore, S. Unauthorized Amateur UAV Detection Based on WiFi Statistical Fingerprint Analysis. IEEE Commun. Mag. 2018, 56, 106–111. [Google Scholar] [CrossRef]
- Bisio, I.; Garibotto, C.; Lavagetto, F.; Sciarrone, A.; Zappatore, S. Blind Detection: Advanced Techniques for WiFi-Based Drone Surveillance. IEEE Trans. Veh. Technol. 2019, 68, 938–946. [Google Scholar] [CrossRef]
- Alipour-Fanid, A.; Dabaghchian, M.; Wang, N.; Wang, P.; Zhao, L.; Zeng, K. Machine Learning-Based Delay-Aware UAV Detection and Operation Mode Identification Over Encrypted Wi-Fi Traffic. IEEE Trans. Inf. Forensics Secur. 2019, 15, 2346–2360. [Google Scholar] [CrossRef]
- Fu, H.; Abeywickrama, S.; Zhang, L.; Yuen, C. Low-Complexity Portable Passive Drone Surveillance via SDR-Based Signal Processing. IEEE Commun. Mag. 2018, 56, 112–118. [Google Scholar] [CrossRef]
- Nguyen, P.; Truong, A.H.; Ravindranathan, M.; Nguyen, A.; Han, R.; Vu, T. Matthan: Drone Presence Detection by Identifying Physical Signatures in the Drone’s RF Communication. In Proceedings of the 15th Annual International Conference on Mobile Systems, Applications, and Services, Niagara Falls, NY, USA, 19–23 June 2017. [Google Scholar]
- Sciancalepore, S.; Ibrahim, O.A.; Oligeri, G.; Di Pietro, R. PiNcH: An effective, efficient, and robust solution to drone detection via network traffic analysis. Comput. Netw. 2020, 168, 107044. [Google Scholar] [CrossRef]
- Richards, M.; Holm, W.; Scheer, J. Principles of Modern Radar: Basic Principles; Scitech Pub.: Raleigh, NC, USA, 2010. [Google Scholar]
- Chen, V. The Micro-Doppler Effect in Radar; Artech House: London, UK, 2011. [Google Scholar]
- Molchanov, P. Radar Target Classification by Micro-Doppler Contributions; Tampere University of Techology: Tampere, Finland, 2014. [Google Scholar]
- Skolnik, M. Introduction to Radar Systems; McGraw-Hill Education: New York, NY, USA, 2002. [Google Scholar]
- Skolnik, M. Radar Handbook, 3rd ed.; McGraw-Hill Education: New York, NY, USA, 2008. [Google Scholar]
- Nathanson, F.; Reilly, J.; Cohen, M. Radar Design Principles: Signal Processing and the Environment; Scitech Pub.: Raleigh, NC, USA, 1999. [Google Scholar]
- Schleher, D. MTI and Pulsed Doppler Radar with MATLAB; Artech House Remote Sensing Library, Artech House: Norwood, MA, USA, 2010. [Google Scholar]
- Huang, N.; Shen, Z.; Long, S.; Wu, M.; Shih, H.; Zheng, Q.; Yen, N.; Tung, C.C.; Liu, H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. In Proceedings of the Royal Society of London. Series A: Mathematical, Physical and Engineering Sciences; Royal Society of London: London, UK, 1998. [Google Scholar]
- Dodde, V.; Masciullo, A.; Ricci, G. Adaptive compensation of amplitude and phase conversion errors for FMCW radar signals. In Proceedings of the 2nd IET International Conference on Intelligent Signal Processing 2015 (ISP), London, UK, 1–2 December 2015. [Google Scholar]
- Sivannarayana, N.; Rao, K.V. I-Q imbalance correction in time and frequency domains with application to pulse doppler radar. Sadhana 1998, 23, 93–102. [Google Scholar] [CrossRef]
- Churchill, F.E.; Ogar, G.W.; Thompson, B.J. The Correction of I and Q Errors in a Coherent Processor. IEEE Trans. Aerosp. Electron. Syst. 1981, 1, 131–137, Corrected in IEEE Trans. Aerosp. Electron. Syst. 1981, 2, 312. [Google Scholar] [CrossRef]
- Wang, Z.; Kostinski, A. A Random Wave Method for Detecting Phase Imbalance in a Coherent Radar Receiver. J. Atmos. Ocean. Technol. 1993, 10, 887–891. [Google Scholar] [CrossRef]
- Kulkarni, M.D.; Kostinski, A.B. A simple formula for monitoring quadrature phase error with arbitrary signals. IEEE Trans. Geosci. Remote. Sens. 1995, 33, 799–802. [Google Scholar] [CrossRef]
- Coluccia, A.; Dodde, V.; Masciullo, A.; Ricci, G. Estimation and compensation of I/Q imbalance for FMCW radar receivers. In Proceedings of the 2016 IEEE Statistical Signal Processing Workshop (SSP), Palma de Mallorca, Spain, 26–29 June 2016. [Google Scholar]
- Coluccia, A.; Fascista, A.; Ricci, G. A k-nearest neighbors approach to the design of radar detectors. Signal Process. 2020, 174, 107609. [Google Scholar] [CrossRef]
- Coluccia, A.; Fascista, A.; Ricci, G. Robust CFAR Radar Detection Using a K-nearest Neighbors Rule. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020. [Google Scholar]
- Coluccia, A.; Fascista, A.; Ricci, G. CFAR Feature Plane: A Novel Framework for the Analysis and Design of Radar Detectors. IEEE Trans. Signal Process. 2020, 68, 3903–3916. [Google Scholar] [CrossRef]
- Coluccia, A.; Fascista, A.; Ricci, G. A novel approach to robust radar detection of range-spread targets. Signal Process. 2020, 166, 107223. [Google Scholar] [CrossRef]
- Rohling, H. Radar CFAR Thresholding in Clutter and Multiple Target Situations. IEEE Trans. Aerosp. Electron. Syst. 1983, 4, 608–621. [Google Scholar] [CrossRef]
- Rohling, H.; Mende, R. OS CFAR performance in a 77 GHz radar sensor for car application. In Proceedings of the International Radar Conference, Beijing, China, 8–10 October 1996. [Google Scholar]
- Hansen, V.G.; Sawyers, J.H. Detectability Loss Due to “Greatest Of” Selection in a Cell-Averaging CFAR. IEEE Trans. Aerosp. Electron. Syst. 1980, 1, 115–118. [Google Scholar] [CrossRef]
- Trunk, G.V. Range Resolution of Targets Using Automatic Detectors. IEEE Trans. Aerosp. Electron. Syst. 1978, 5, 750–755. [Google Scholar] [CrossRef]
- Rickard, J.T.; Dillard, G.M. Adaptive Detection Algorithms for Multiple-Target Situations. IEEE Trans. Aerosp. Electron. Syst. 1977, 4, 338–343. [Google Scholar] [CrossRef]
- Ritcey, J.A. Performance Analysis of the Censored Mean-Level Detector. IEEE Trans. Aerosp. Electron. Syst. 1986, 4, 443–454. [Google Scholar] [CrossRef]
- Gandhi, P.P.; Kassam, S.A. Analysis of CFAR processors in nonhomogeneous background. IEEE Trans. Aerosp. Electron. Syst. 1988, 24, 427–445. [Google Scholar] [CrossRef]
- Elias-Fuste, A.R.; de Mercado, M.G.G.; de los Reyes Davo, E. Analysis of some modified ordered statistic CFAR: OSGO and OSSO CFAR. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 197–202. [Google Scholar] [CrossRef]
- Ritcey, J.A.; Hines, J.L. Performance of max-mean level detector with and without censoring. IEEE Trans. Aerosp. Electron. Syst. 1989, 25, 213–223. [Google Scholar] [CrossRef]
- Wilson, S.L. Two CFAR algorithms for interfering targets and nonhomogeneous clutter. IEEE Trans. Aerosp. Electron. Syst. 1993, 29, 57–72. [Google Scholar] [CrossRef]
- Ritcey, J.A.; Hines, J.L. Performance of MAX family of order-statistic CFAR detectors. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 48–57. [Google Scholar] [CrossRef]
- Guo, X.; Ng, C.S.; de Jong, E.; Smits, A.B. Micro-Doppler Based Mini-UAV Detection with Low-Cost Distributed Radar in Dense Urban Environment. In Proceedings of the 2019 16th European Radar Conference (EuRAD), Paris, France, 2–4 October 2019. [Google Scholar]
- Patel, J.S.; Al-Ameri, C.; Fioranelli, F.; Anderson, D. Multi-time frequency analysis and classification of a micro-drone carrying payloads using multistatic radar. J. Eng. 2019, 20, 7047–7051. [Google Scholar] [CrossRef]
- Ritchie, M.; Fioranelli, F.; Borrion, H.; Griffiths, H. Multistatic micro-Doppler radar feature extraction for classification of unloaded/loaded micro-drones. IET Radar Sonar Navig. 2016, 11, 116–124. [Google Scholar] [CrossRef]
- Shin, D.; Jung, D.; Kim, D.; Ham, J.; Park, S. A Distributed FMCW Radar System Based on Fiber-Optic Links for Small Drone Detection. IEEE Trans. Instrum. Meas. 2016, 66, 340–347. [Google Scholar] [CrossRef]
- Caris, M.; Stanko, S.; Johannes, W.; Sieger, S.; Pohl, N. Detection and tracking of Micro Aerial Vehicles with millimeter wave radar. In Proceedings of the 2016 European Radar Conference (EuRAD), London, UK, 5–7 October 2016. [Google Scholar]
- Hoffmann, F.; Ritchie, M.; Fioranelli, F.; Charlish, A.; Griffiths, H. Micro-Doppler based detection and tracking of UAVs with multistatic radar. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 1–6 May 2016. [Google Scholar]
- Fang, X.; Min, R.; Cao, Z.; Pi, Y. A coherent integration method for drone detection via PSIAF-KT-SFT. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019. [Google Scholar]
- Ezuma, M.; Ozdemir, O.; Anjinappa, C.K.; Gulzar, W.A.; Guvenc, I. Micro-UAV Detection with a Low-Grazing Angle Millimeter Wave Radar. In Proceedings of the 2019 IEEE Radio and Wireless Symposium (RWS), Orlando, FL, USA, 20–23 January 2019. [Google Scholar]
- de Quevedo, A.D.; Urzaiz, F.I.; Menoyo, J.G.; Lopez, A.A. Drone detection and radar-cross-section measurements by RAD-DAR. IET Radar Sonar Navig. 2019, 13, 1437–1447. [Google Scholar] [CrossRef]
- Aldowesh, A.; Alnuaim, T.; Alzogaiby, A. Slow-Moving Micro-UAV detection with a small scale Digital Array Radar. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019. [Google Scholar]
- Patel, J.S.; Fioranelli, F.; Anderson, D. Review of radar classification and RCS characterisation techniques for small UAVs or drones. IET Radar Sonar Navig. 2018, 12, 911–919. [Google Scholar] [CrossRef]
- Samaras, S.; Diamantidou, E.; Ataloglou, D.; Sakellariou, N.; Vafeiadis, A.; Magoulianitis, V.; Lalas, A.; Dimou, A.; Zarpalas, D.; Votis, K.; et al. Deep Learning on Multi Sensor Data for Counter UAV Applications—A Systematic Review. Sensors 2019, 19, 4837. [Google Scholar] [CrossRef]
- Zhang, P.; Yang, L.; Chen, G.; Li, G. Classification of drones based on micro-Doppler signatures with dual-band radar sensors. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium—Fall (PIERS—FALL), Singapore, 19–22 November 2017. [Google Scholar]
- Björklund, S. Target Detection and Classification of Small Drones by Boosting on Radar Micro-Doppler. In Proceedings of the 2018 15th European Radar Conference (EuRAD), Madrid, Spain, 26–28 September 2018. [Google Scholar]
- Björklund, S.; Petersson, H.; Hendeby, G. Features for micro-Doppler based activity classification. IET Radar Sonar Navig. 2015, 9, 1181–1187. [Google Scholar] [CrossRef]
- Björklund, S.; Johansson, T.; Petersson, H. Target classification in perimeter protection with a micro-Doppler radar. In Proceedings of the 2016 17th International Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016. [Google Scholar]
- Björklund, S.; Rydell, J. Micro-Doppler classification with boosting in perimeter protection. In Proceedings of the International Conference on Radar Systems (Radar 2017), Belfast, UK, 23–26 October 2017. [Google Scholar]
- Kim, Y.; Ling, H. Human Activity Classification Based on Micro-Doppler Signatures Using a Support Vector Machine. IEEE Trans. Geosci. Remote. Sens. 2009, 47, 1328–1337. [Google Scholar]
- Ma, X.; Oh, B.; Sun, L.; Toh, K.; Lin, Z. EMD-Based Entropy Features for micro-Doppler Mini-UAV Classification. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 October 2018. [Google Scholar]
- Rahman, S.; Robertson, D. Radar micro-Doppler signatures of drones and birds at K-band and W-band. Sci. Rep. 2018, 8, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Fu, H.; Abeywickrama, S.; Jayasinghe, L.; Yuen, C.; Chen, J. Drone Classification and Localization Using Micro-Doppler Signature with Low-Frequency Signal. In Proceedings of the 2018 IEEE International Conference on Communication Systems (ICCS), Chengdu, China, 19–21 December 2018. [Google Scholar]
- Oh, B.S.; Guo, X.; Lin, Z. A UAV classification system based on FMCW radar micro-Doppler signature analysis. Expert Syst. Appl. 2019, 132, 239–255. [Google Scholar] [CrossRef]
- Oh, B.; Guo, X.; Wan, F.; Toh, K.; Lin, Z. Micro-Doppler Mini-UAV Classification Using Empirical-Mode Decomposition Features. IEEE Geosci. Remote. Sens. Lett. 2017, 15, 227–237. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Approach | Pros and Cons |
|---|---|---|
| Video | One or more cameras to perform identification exploiting drone motion |
|
| Audio | Sound generated by flying drones exploited to perform DOA-based identification |
|
| RF (passive) | Downlink video stream or EM scattering of opportunistic RF signals |
|
| Radar (RF active) | Backscattering of RF signal exploited to perform Doppler-based tracking and delay-based identification |
|
| LIDAR (laser scanner) | Similar to radar, but backscattering of laser light is exploited |
|
| Environment | ||||
|---|---|---|---|---|
| Homogeneous | Interfering Targets | Clutter Boundaries | Interfering Targets and Clutter Boundaries | |
| CA | ✓ | |||
| GOCA | ✓ | |||
| SOCA | ✓ | |||
| CS | ✓ | |||
| TM | ✓ | ✓ | ✓ | |
| OS | ✓ | ✓ | ✓ | |
| GOOS | ✓ | ✓ | ✓ | |
| GOCS | ✓ | ✓ | ✓ | |
| Paper | Radar Type | Frequency Band | CFAR |
|---|---|---|---|
| [59] | CW | K-band | ✓ |
| [60] | multistatic pulsed | S-band | ✓ |
| [62] | FMCW | K-band | ✗ |
| [63] | FMCW | W-band | ✓ |
| [64] | multistatic pulsed | S-band | ✓ |
| [65] | FMCW | X-band | ✗ |
| [66] | FMCW | K-band | ✓ |
| [67] | FMCW | X-band | ✓ |
| [68] | FMCW | S-band | ✓ |
| Paper | Radar Type | Frequency Band | Features | Classifier |
|---|---|---|---|---|
| [59] | CW | K-band | Micro-Doppler signature | SVM |
| [60] | multistatic pulsed | S-band | Micro-Doppler signature | CNN (AlexNet) |
| [61] | FMCW | S-band | Micro-Doppler signature | NB, DAC, Random Forest |
| [71] | CW | X and K bands | Micro-Doppler signature | SVM |
| [72] | CW | X-band | 6 physical features from [76] | LogitBoost |
| [77] | CW | X-band | 6 entropy measures from IMF | SVM |
| [78] | FMCW | K and W bands | Micro-Doppler signature | not specified |
| [79] | CW | UHF | Micro-Doppler signature | SVM, KNN, NB, Random Forest |
| [80] | FMCW | X-band | Micro-Doppler signature and 13 IMF features | TER |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Coluccia, A.; Parisi, G.; Fascista, A. Detection and Classification of Multirotor Drones in Radar Sensor Networks: A Review. Sensors 2020, 20, 4172. https://doi.org/10.3390/s20154172
Coluccia A, Parisi G, Fascista A. Detection and Classification of Multirotor Drones in Radar Sensor Networks: A Review. Sensors. 2020; 20(15):4172. https://doi.org/10.3390/s20154172
Chicago/Turabian StyleColuccia, Angelo, Gianluca Parisi, and Alessio Fascista. 2020. "Detection and Classification of Multirotor Drones in Radar Sensor Networks: A Review" Sensors 20, no. 15: 4172. https://doi.org/10.3390/s20154172
APA StyleColuccia, A., Parisi, G., & Fascista, A. (2020). Detection and Classification of Multirotor Drones in Radar Sensor Networks: A Review. Sensors, 20(15), 4172. https://doi.org/10.3390/s20154172