A Tool to Calculate the Level of Occupancy in Indoor and Outdoor Spaces Using BLE and Open Data to Be Published in Real-Time


 , and
, and
Abstract
1. Introduction
2. Materials
2.1. BLE Technology and Beacon Devices
- UUID: A unique identifier for each beacon;
- Major: A parameter with a numerical value to identify and distinguish a group of beacons; all beacons from the same location (classroom, laboratory, area, etc.) will have the same value;
- Minor: A parameter with a numerical value to identify a single beacon within a group of beacons—identifies the beacon belonging to a group with a specific Major;
- Region: A set of beacons—regions can be defined according to the major and minor values. Once defined, all movements entering and exiting the region can be monitored (e.g., whether a device is within the range of the beacons defined by that region);
- Range: A parameter to define whether a device is within a specific range or distance. Range uses the concept of proximity estimation. Each beacon broadcasts a Bluetooth signal at a certain strength, which diminishes as the signal travels through the air. This allows the receiving device to estimate the approximate distance to the beacon. In fact, it is an inverse-square relationship, whereby if the distance of the beacon increases twofold, the intensity is reduced four times. As a result, the precision of the estimations decreases drastically as the distance increases. The range will, therefore, use the different intensities of the received signals to determine which beacons are likely to be closer and which are likely further from the device, and to classify the beacons into regions according to proximity—Immediate (strong signal within a few centimeters); Near (medium strength signal usually within a few meters); Far (weak signal, more than a few meters away).
2.2. Level Occupancy Tool. Algorithms
- Establish and configure the area or region that will be monitored by beacons.
- Determine the precise location of the user, and hence the smartphone, with regard to the beacons that make up the region or area.
- Determine whether each user is located within or outside the previously defined and configured area.
2.2.1. Establish and Configure the Region or Area to Be Monitored
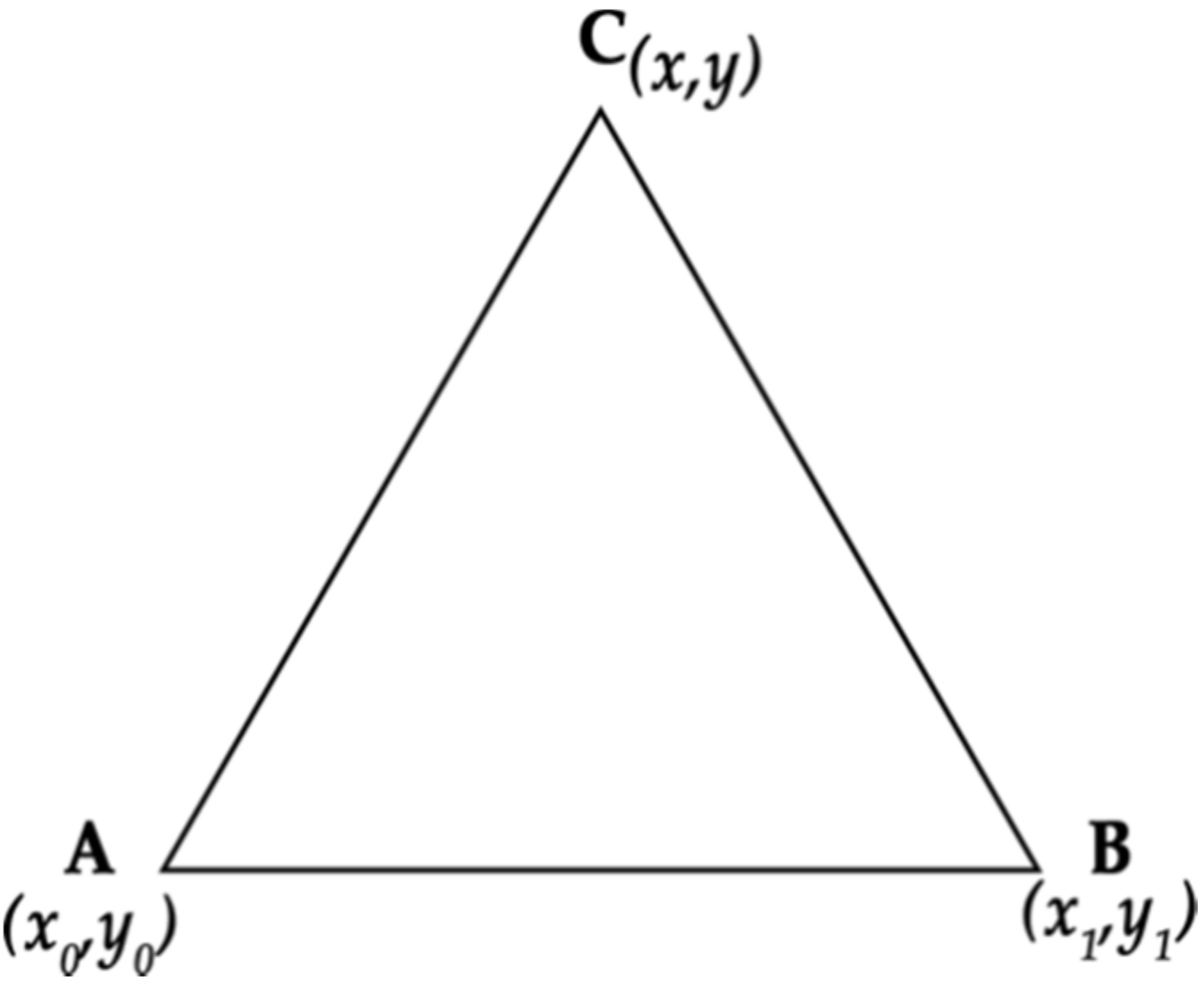
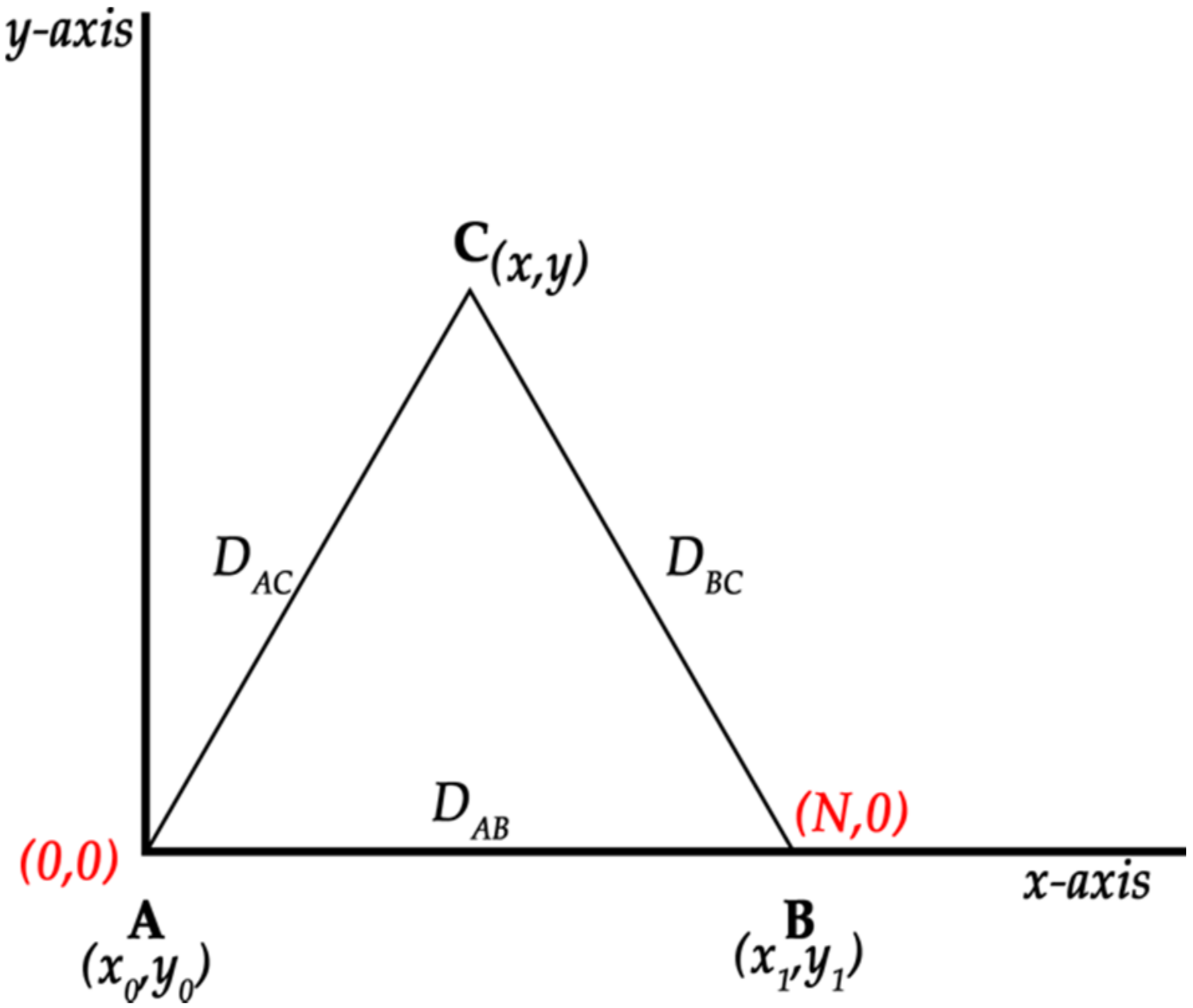
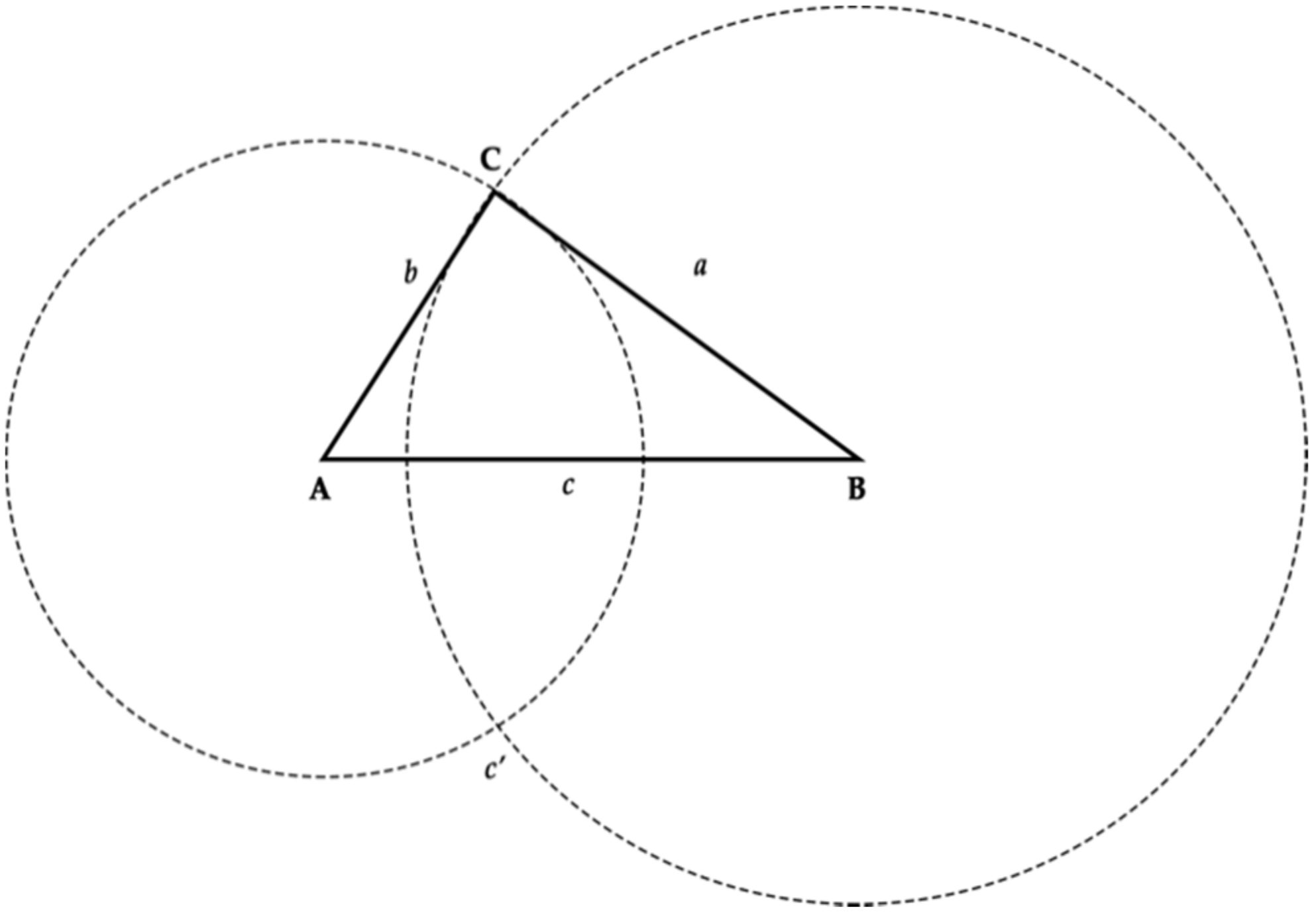
2.2.2. Determine the Precise Location of a User with Respect to the Beacons That Make Up the Region
2.2.3. Determine Whether a User Is Located within or Outside of a Defined and Previously Configured Area
3. Solution
3.1. Beacons and Algorithms
3.2. Data Management
3.3. Open Data Set for a University Environment
3.4. Mobile Applications
4. Methods
- A squared-shaped laboratory classroom of about 40–50 square meters with 20 computers with WIFI interferences, tables, chairs and other office furniture. In this case, four beacons were placed. All beacons were located about 1.5 m from the floor. One of them was placed over a window ledge, and the rest on the wall.
- A square-shaped library study room of about 25 square meters, with office furniture and WIFI signal but without computers. Three beacons were located on the middle of the room walls.
- Additionally, the tool was tested in outdoor areas, such as a cloister with no interferences or furniture. Three beacons were placed in order to define a triangle-shaped area of about 30 square meters.
- Finally, it was tested in two outdoor fitness tracks, one of which is a stretching area without equipment and the other has fitness equipment—both with a size of about 50 square meters and, in both cases, four beacons were installed over metal posts specifically placed to locate beacons.
5. Results
6. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Want, R.; Hopper, A.; Falcao, V.; Gibbons, J. The active badge location system. ACM Trans. Inf. Syst. 1992, 10, 91–102. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications (PerCom 2003), Fort Worth, TX, USA, 26 March 2003; IEEE: Piscataway, NJ, USA, 2003; pp. 407–415. [Google Scholar]
- Strutu, M.; Caspari, D.; Pickert, J.; Grossmann, U.; Popescu, D. Pedestrian smartphone based localization for large indoor areas. In Proceedings of the 7th International Conference on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS), Berlin, Germany, 12–14 September 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 450–454. [Google Scholar]
- Balaji, B.; Xu, J.; Nwokafor, A.; Gupta, R.; Agarwal, Y. Sentinel: Occupancy based HVAC actuation using existing WIFI infrastructure within commercial buildings. In Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems, Roma, Italy, 13 November 2011; Association for Computing Machinery: New York, NY, USA, 2011; pp. 1–14. [Google Scholar]
- Melfi, R.; Rosenblum, B.; Nordman, B.; Christensen, K. Measuring building occupancy using existing network infrastructure. In Proceedings of the Green Computing Conference and Workshops (IGCC), Orlando, FL, USA, 25–28 July 2011; IEEE: Piscataway, NJ, USA, 2013; pp. 1–8. [Google Scholar]
- Zheng, L.; Hu, B.J.; Qiu, J.; Cui, M. A Deep Learning Based Self-Calibration Time-Reversal Fingerprinting Localization Approach on Wi-Fi Platform. IEEE Internet Things J. 2020, 1. [Google Scholar] [CrossRef]
- Shi, S.; Sigg, S.; Chen, L.; Ji, Y. Accurate location tracking from CSI-based passive device-free probabilistic fingerprinting. IEEE Trans. Veh. Technol. 2018, 67, 5217–5230. [Google Scholar] [CrossRef]
- Dwiyasa, F.; Lim, M.H.; Ong, Y.S.; Panigrahi, B. Extreme learning machine for indoor location fingerprinting. Multidimens. Syst. Signal Proc. 2017, 28, 867–883. [Google Scholar] [CrossRef]
- Bluetooth SIG. Specification of Bluetooth system. 2010. Available online: http://www.bluetooth.org (accessed on 11 April 2020).
- Barsocchi, P.; Crivello, A.; Girolami, M.; Mavilia, F.; Palumbo, F. Occupancy detection by multi-power Bluetooth low energy beaconing. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Yang, Y.; Li, Z.; Pahlavan, K. Using iBeacon for intelligent in-room presence detection. In Proceedings of the International Multi-Disciplinary Conference on Cognitive Methods in Situation Awareness and Decision Support (CogSIMA), San Diego, CA, USA, 21–25 March 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 187–191. [Google Scholar]
- Castillo-Cara, M.; Lovón-Melgarejo, J.; Bravo-Rocca, G.; Orozco-Barbosa, L.; García-Varea, I. An Empirical Study of the Transmission Power Setting for Bluetooth-Based Indoor Localization Mechanisms. Sensors 2017, 17, 1318. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Guo, Y.; Yang, L.; Tian, M. An indoor positioning system based on ibeacon. In Transactions on Edutainment XIII; Springer: Berlin, Germany, 2017; pp. 262–272. [Google Scholar]
- Conte, G.; De Marchi, M.; Nacci, A.A.; Rana, V.; Sciuto, D. BlueSentinel: A first approach using iBeacon for an energy efficient occupancy detection system. In Proceedings of the 1st ACM International Conference on Embedded Systems for Energy-Efficient Buildings (BuildSys), Memphis, TN, USA, 4–6 November 2014; Association for Computing Machinery: New York, NY, USA, 2014; pp. 11–19. [Google Scholar]
- Corna, A.; Fontana, L.; Nacci, A.A.; Sciuto, D. Occupancy detection via iBeacon on Android devices for smart building management. In Proceedings of the Design, Automation and Test in Europe Conference and Exhibition (DATE), Grenoble, France, 9–13 March 2015; EDA Consortium: San Jose, CA, USA, 2015; pp. 629–632. [Google Scholar]
- Pratama, A.R.; Widyawan, W.; Lazovik, A.; Aiello, M. Multi-User Low Intrusive Occupancy Detection. Sensors 2018, 18, 796. [Google Scholar] [CrossRef] [PubMed]
- Zou, H.; Jiang, H.; Luo, Y.; Zhu, J.; Lu, X.; Xie, L. Bluedetect: An iBeacon-enabled scheme for accurate and energy-efficient indoor-outdoor detection and seamless location-based service. Sensors 2016, 16, 268. [Google Scholar] [CrossRef] [PubMed]
- DiBiase, D. Land Surveying and GPS. Triangulation and Trilateration. In Nature of Geographic Information Systems: An Open Geospatial Textbook; Pennsylvania State University: State College, PA, USA, 2014; p. 114. [Google Scholar]
- Richardson, L.; Amundsen, M.; Ruby, S. RESTful Web APIs: Services for a Changing World; O’Reilly: Sebastopol, CA, USA, 2013. [Google Scholar]
- Dietrich, D.; Gray, J.; McNamara, T.; Poikola, A.; Pollock, R.; Tait, J.; Zijlstra, T. Open Data Handbook. Open Knowledged International. Available online: http://opendatahandbook.org/guide/en/ (accessed on 11 April 2020).
- CRUE. Comisión Sectorial de Tecnologías de la Información y las Comunicaciones. Hacia una Universidad Abierta. Available online: http://tic.crue.org/wp-content/uploads/2016/03/Haciaunauniversidadabierta.pdf (accessed on 10 April 2020).
- Estimote. Intro to Estimote Apis. Available online: https://developer.estimote.com/ (accessed on 11 April 2020).
- Play. Play 2.6.x Documentation. Available online: https://www.playframework.com/documentation/2.6.x/Home (accessed on 11 April 2020).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Name | Description |
|---|---|
| “Room Code” | Identifier code for classroom/laboratory |
| “Room Name” | Official classroom identifier according to signage nomenclature |
| “Campus Location” | Campus where the classroom is physically located |
| “Building Location” | Building on the campus where the classroom is physically located |
| Description | Classroom use and whether it includes student desks, computers, laboratory radio, etc. |
| Capacity | Total classroom capacity |
| Schedule | The opening hour is indicated, followed by a space and the closing hour. If the room opens/closes more than once a day, all opening and closing hours will be included, separated by a space |
| Accessibility | Whether accessible or not |
| “Real time Occupancy” | This information will be calculated by a counting tool and updates every 5 min |
| Data Name | Description |
|---|---|
| “Room code” | Identifier code for classroom/laboratory. |
| “Element identifier” | Identifier code for an element. |
| “Element description” | Description that clearly identifies element. |
| Quantity | Number of elements of a particular type in the classroom. This would be applicable only if able to be measured. |
| Availability | Possible values: Yes, No—as a function of whether the element is available. |
| Android | IOS | |||
|---|---|---|---|---|
| Number Users Entered | Number Users Closely, No Entered | Number Users Entered | Number Users Closely, No Entered | |
| Laboratory classroom | 39 | 31 | 23 | 19 |
| Library study room | 21 | 31 | 13 | 19 |
| Fitness track | 13 | 31 | 8 | 19 |
| Android | IOS | |||||
|---|---|---|---|---|---|---|
| Laboratory Classroom | Library Study Room | Fitness Track | Laboratory Classroom | Library Study Room | Fitness Track | |
| Accuracy | 0.961 | 0.965 | 0.961 | 0.960 | 0.967 | 0.960 |
| Precision | 0.983 | 0.949 | 0.904 | 0.981 | 0.952 | 0.903 |
| Recall | 0.947 | 0.964 | 0.969 | 0.945 | 0.966 | 0.970 |
| Specificity | 0.979 | 0.965 | 0.957 | 0.978 | 0.967 | 0.956 |
| F-Score | 0.965 | 0.957 | 0.936 | 0.963 | 0.959 | 0.935 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mateos Sánchez, M.; Berjón Gallinas, R.; Beato Gutiérrez, M.E.; Fermoso García, A.M. A Tool to Calculate the Level of Occupancy in Indoor and Outdoor Spaces Using BLE and Open Data to Be Published in Real-Time. Sensors 2020, 20, 3916. https://doi.org/10.3390/s20143916
Mateos Sánchez M, Berjón Gallinas R, Beato Gutiérrez ME, Fermoso García AM. A Tool to Calculate the Level of Occupancy in Indoor and Outdoor Spaces Using BLE and Open Data to Be Published in Real-Time. Sensors. 2020; 20(14):3916. https://doi.org/10.3390/s20143916
Chicago/Turabian StyleMateos Sánchez, Montserrat, Roberto Berjón Gallinas, M. Encarnación Beato Gutiérrez, and Ana M. Fermoso García. 2020. "A Tool to Calculate the Level of Occupancy in Indoor and Outdoor Spaces Using BLE and Open Data to Be Published in Real-Time" Sensors 20, no. 14: 3916. https://doi.org/10.3390/s20143916
APA StyleMateos Sánchez, M., Berjón Gallinas, R., Beato Gutiérrez, M. E., & Fermoso García, A. M. (2020). A Tool to Calculate the Level of Occupancy in Indoor and Outdoor Spaces Using BLE and Open Data to Be Published in Real-Time. Sensors, 20(14), 3916. https://doi.org/10.3390/s20143916