IoT Sensing Platform as a Driver for Digital Farming in Rural Africa

 ,
,  ,
,  , , ,
, , ,  and
and 
Abstract
1. Introduction
- Sensing box based on low-cost, off-the-shelf hardware and software modularity, following a DIY approach for further extension without requirements of extended hardware and software development knowledge.
- Soil classifier based on computer vision with soil images acquired by a dedicated camera and controlled light system.
- Standardized 3D-printed protective casing to safeguard all hardware components from the extreme environment conditions, and focused on easy production, assembly and simple integration of the proposed solution.
- In-lab validation of each component of IoT sensing platform, namely the sensing box, the computer vision, and the casing, targeting further finetuning and improvements to allow a single, integrated platform robust enough for the target application scenarios.
2. Background and Related Work
2.1. How ICT Enables Digital Farming
- Type of farming: whether the solutions target rearing of animals or crop cultivation;
- Purpose of applied technology: focusing on the main goal of the employed solution in the farming processes, that is, monitoring, actuation, control, and automation;
- Expected outcomes: aiming at better yields, pest and disease control, quality standards, safe transportation, improved storage, nutrient levels, health status, sustainable process.
- Considered technology: referring to the employed ICT concepts to derive the solutions, that is, sensing, communication networks, computer vision, cloud infrastructure, mobile applications, AI, ML, unmanned vehicles and robots, and so on.
2.2. Digital Farming for Africa
3. Proposed IoT Sensing Platform
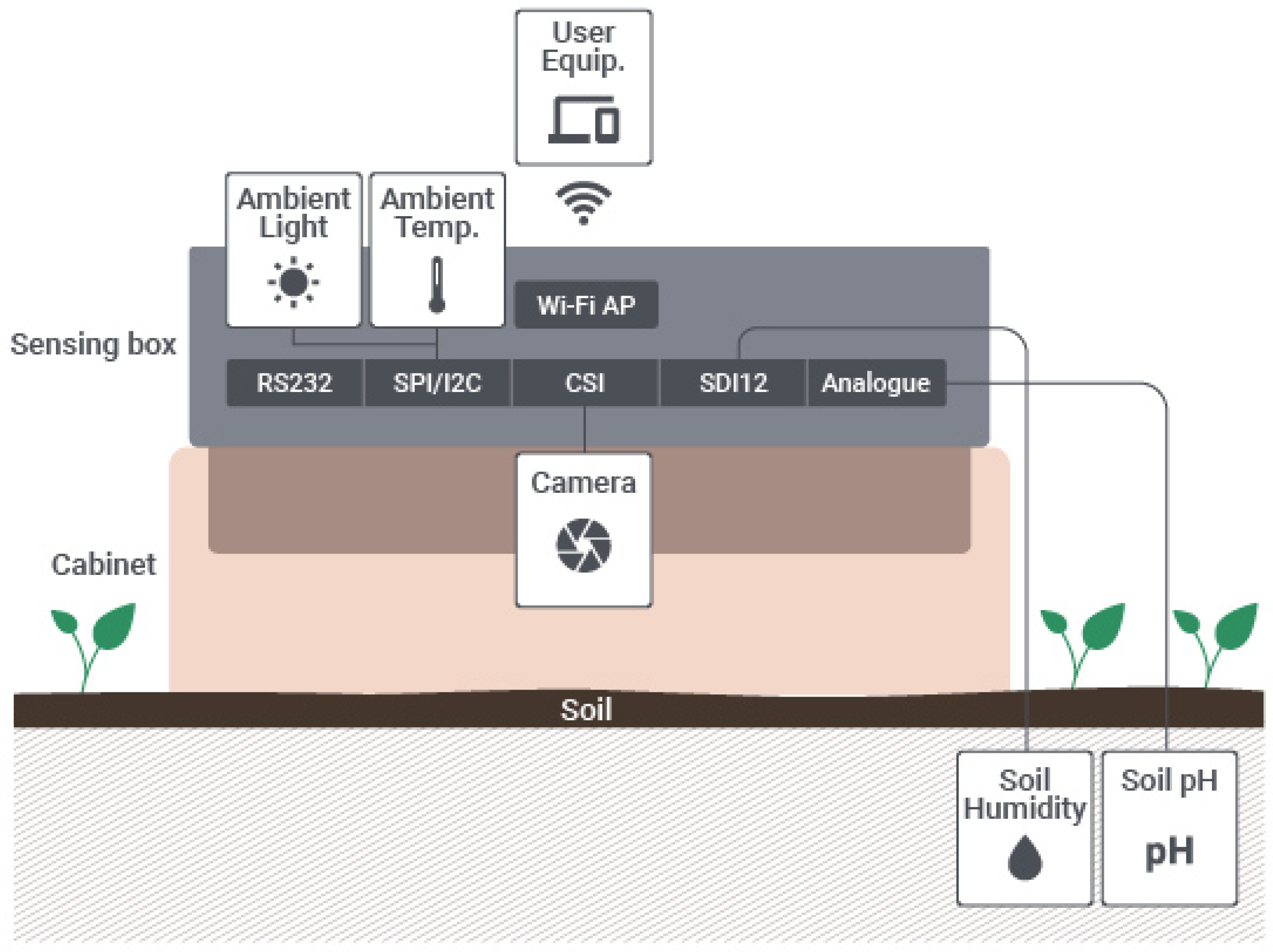
3.1. Architecture
3.2. Sensing Box Component
3.2.1. Analysed Sensors and Probes
- LaMotte [22]—offers a set of soil testing kits and instrumentation equipment. The testing kits are reagent-based products, offering a visual colour matching system to monitor the soil status. This is a disposable solution only possible to integrate in the sensing box by an automatic analysis of the colour matching system. The instrumentation equipment is composed by a unique system that incorporates the sensing probe and a display to show the measured values. They do not provide any communication interface, so its integration in the sensing box is not possible due to associated complexity.
- pH Sensor by Mettler Toledo [23]—offers laboratory grade pH sensor. Some of the pH probes—as for example the pH electrode InLab Solids [24] and pH electrode InLab Solids Go-ISM [25]—are designed to be used in semi solid material, so they could be used to access obtain the pH status of the soil. They provide an analogue interface over multiple physical interfaces, so they can be integrated in the sensing box due to simplicity.
- DIY sensors—low-cost sensors with low precision and robustness levels. They can be used in budget-constrained implementations, where the sensor precision and robustness are not mandatory requirements;
- Commercial grade sensors—sensors sold for commercial applications. More expensive than the DIY sensors, but more reliable and robust;
- Soil analysis kits—reagent-based products that offer a visual colour matching system to monitor the soil status.
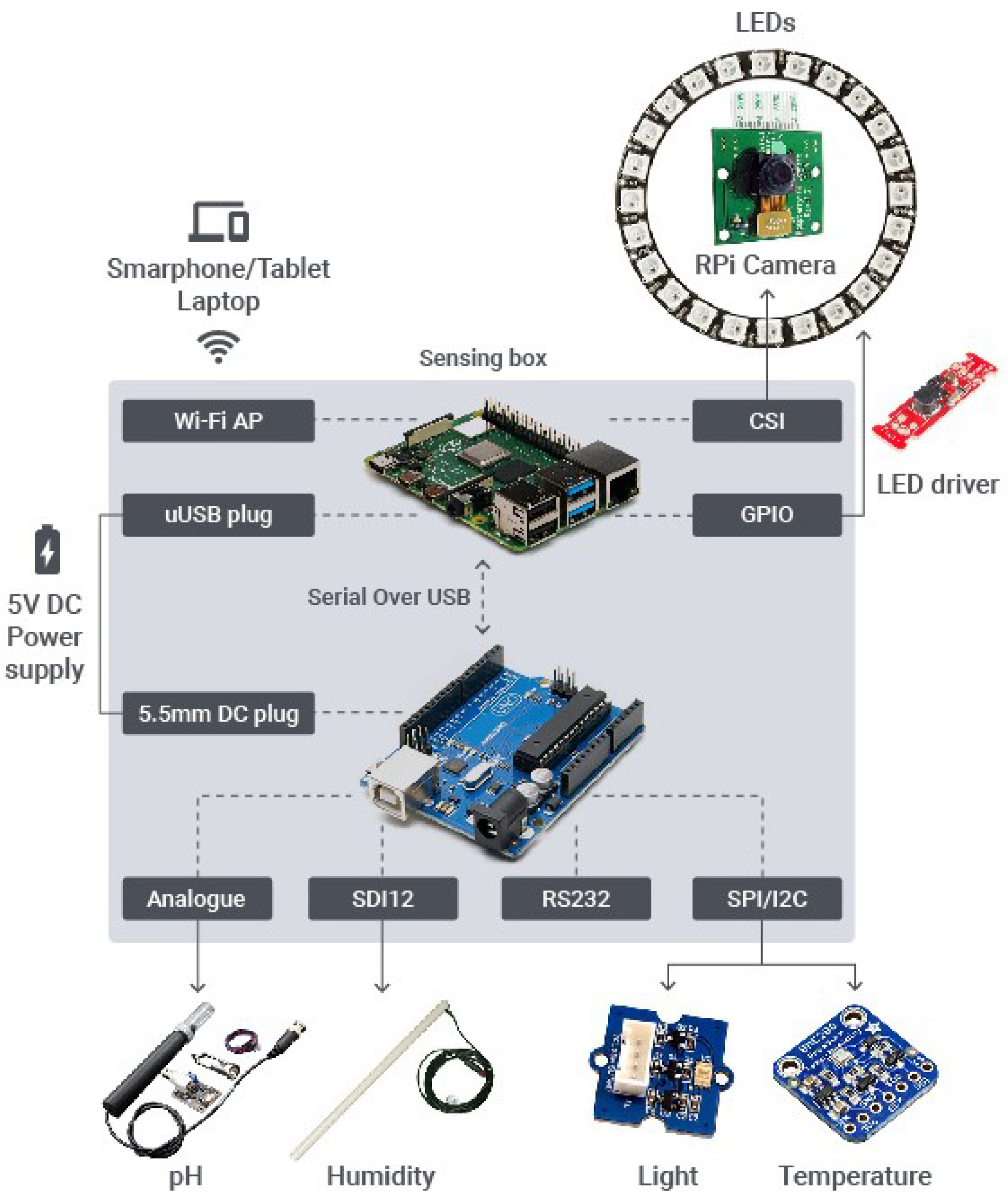
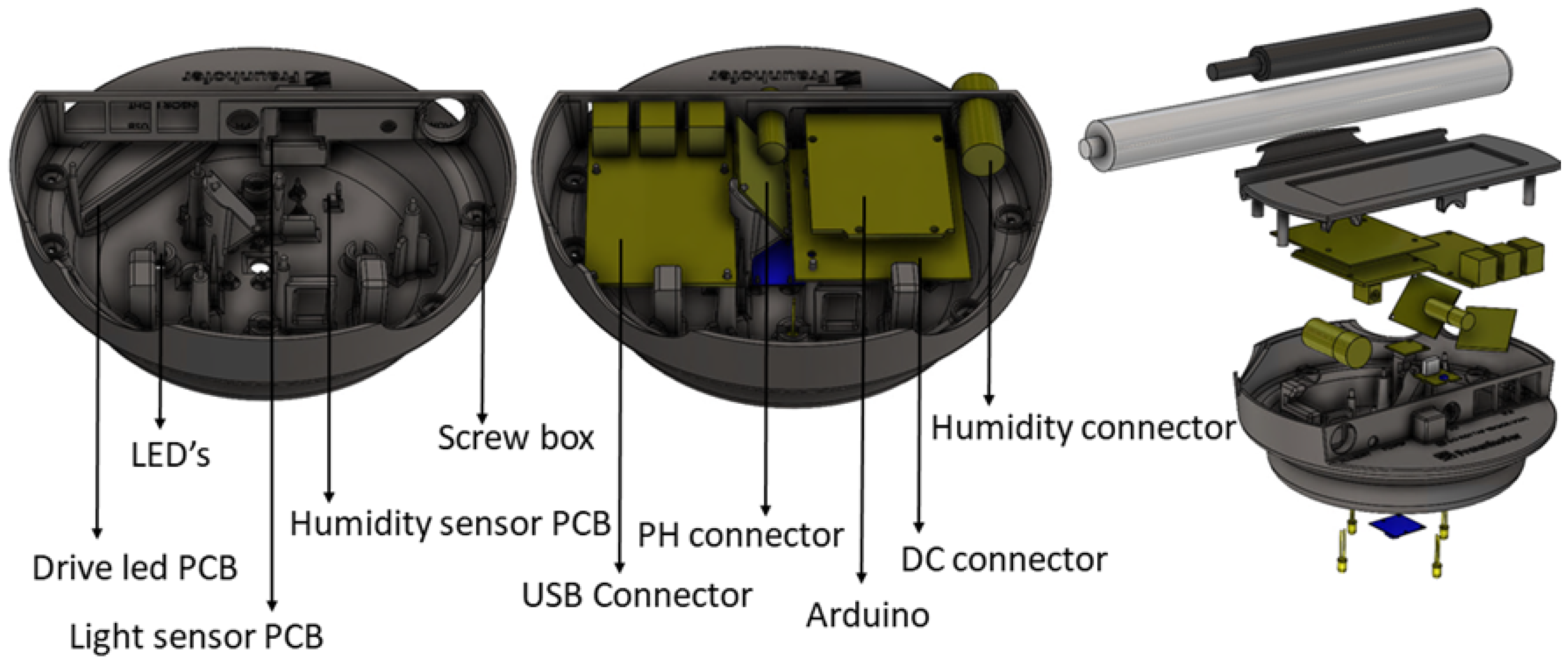
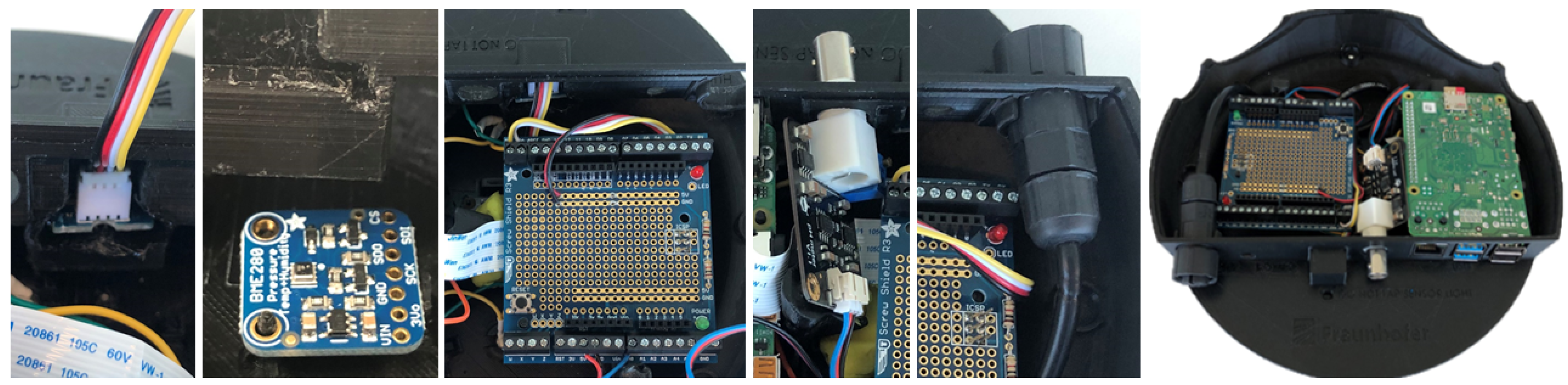
3.2.2. Detailed Overview of the Sensing Box Hardware
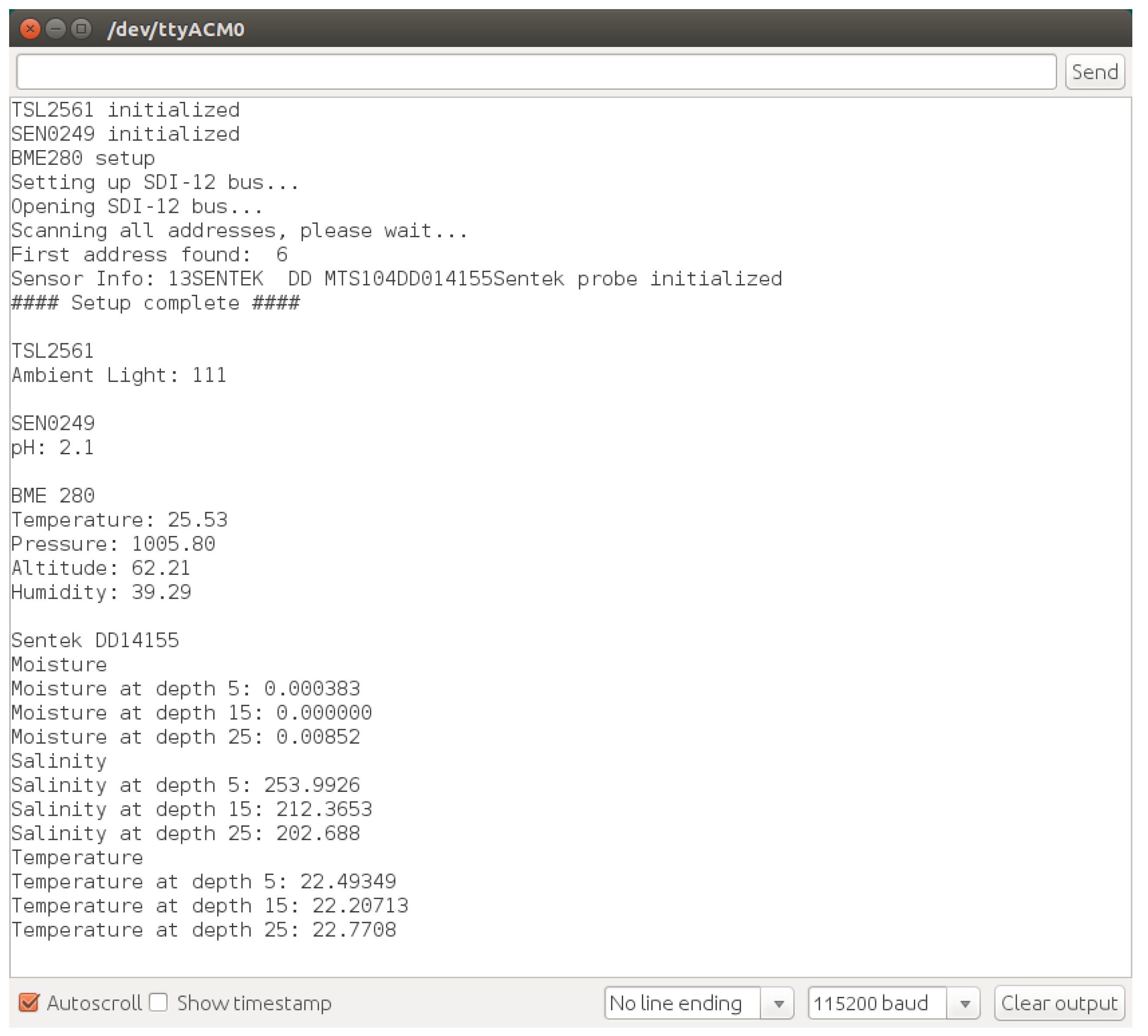
- DFRobot SEN0249 analogue spear tip pH sensor [29]. This is a pH sensor for semisolid material with an analogue interface. It is connected to the Arduino through the screw connectors on the Arduino header.
- Sentek drill & drop soil moisture, salinity and temperature probe [30]. This is a multi-depth industrial grade soil monitoring probe that communicates through SDI. It is connected to the sensing box through the SDI interface present in the screw connectors of the Arduino header. If cost or market availability may be an issue, a low-cost alternative to measure the soil moisture and temperature is also being explored with Seeed Studio 314010012 moisture and temperature sensor [31]. This sensor is connected to the sensing box through I2C interface present in the screw connectors of the Arduino header.
- Adafruit 2652 BME280 I2C/SPI temperature sensor [32]. It is worth mentioning that the Adafruit BME280 also provides humidity, barometric pressure, and altitude. This sensor is connected to the sensing box by soldering its pins into the protoboard space of the Arduino header.
- Seeed Studio (TSL2561) 101020030 digital light sensor [33]. This light sensor follows a DIY approach. It is connected to the sensing box through the I2C interface available in the screw connectors of the Arduino header.
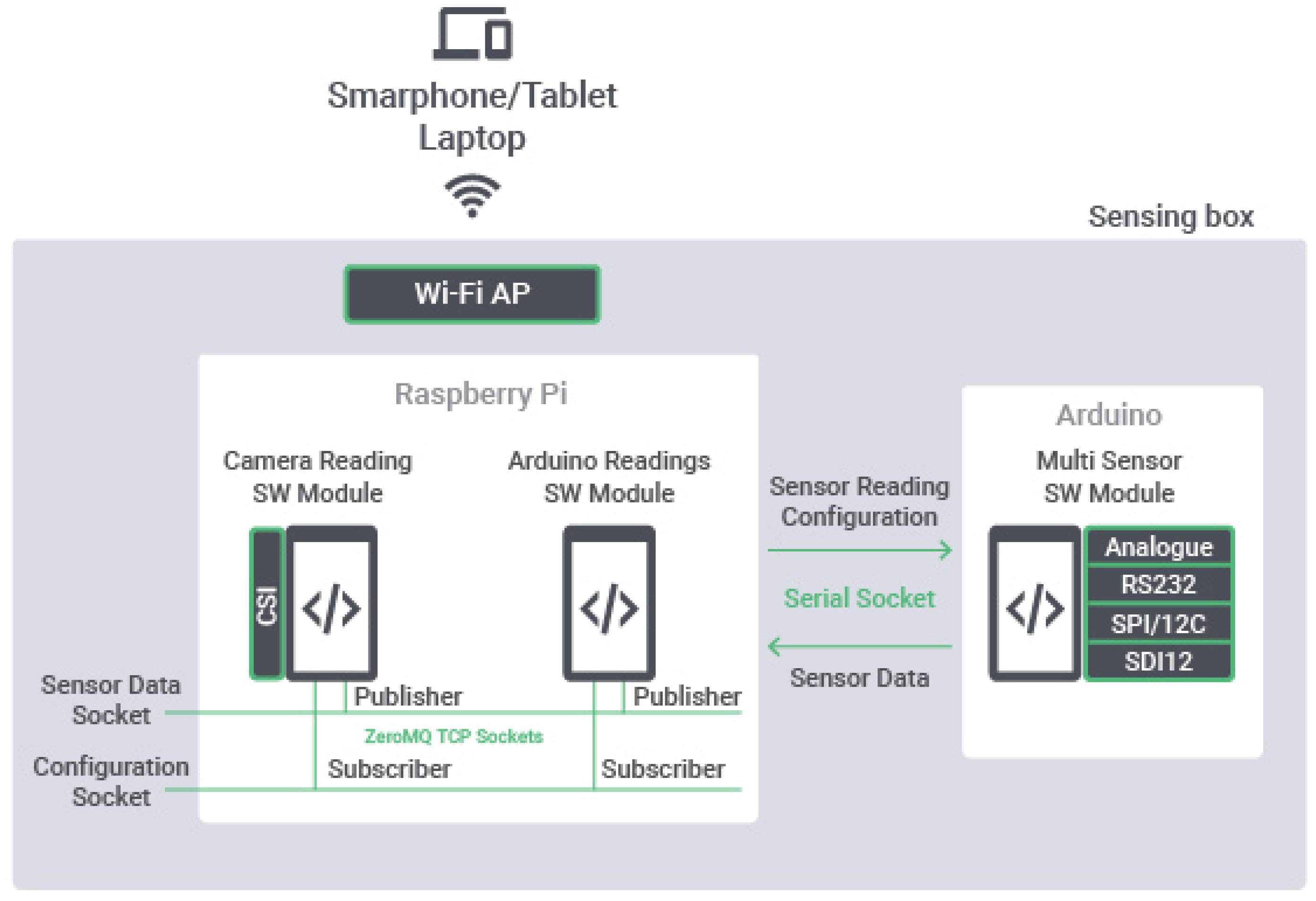
3.2.3. Detailed Overview of the Sensing Box Software
- A Configuration Socket dedicated to communicating configurations for the software modules. In this socket, it is published the configuration for each sensor (e.g., period and duration of readings). The software modules running on Raspberry Pi subscribe to this socket to receive this information and configure themselves according to the configuration received.
- A Sensor Data Socket dedicated to communicating the data acquired from the sensors. The software modules running on the Raspberry Pi publish in this socket the readings they receive from the sensors.
- The communication on these sockets follows a publish-subscribe paradigm, where the software running on the UE opens the Configuration Socket in publisher mode and publishes the configuration message, while the software modules in the Raspberry Pi open it in subscriber mode and consumes the configuration message.
3.3. Computer Vision Component
3.3.1. Algorithms and Datasets
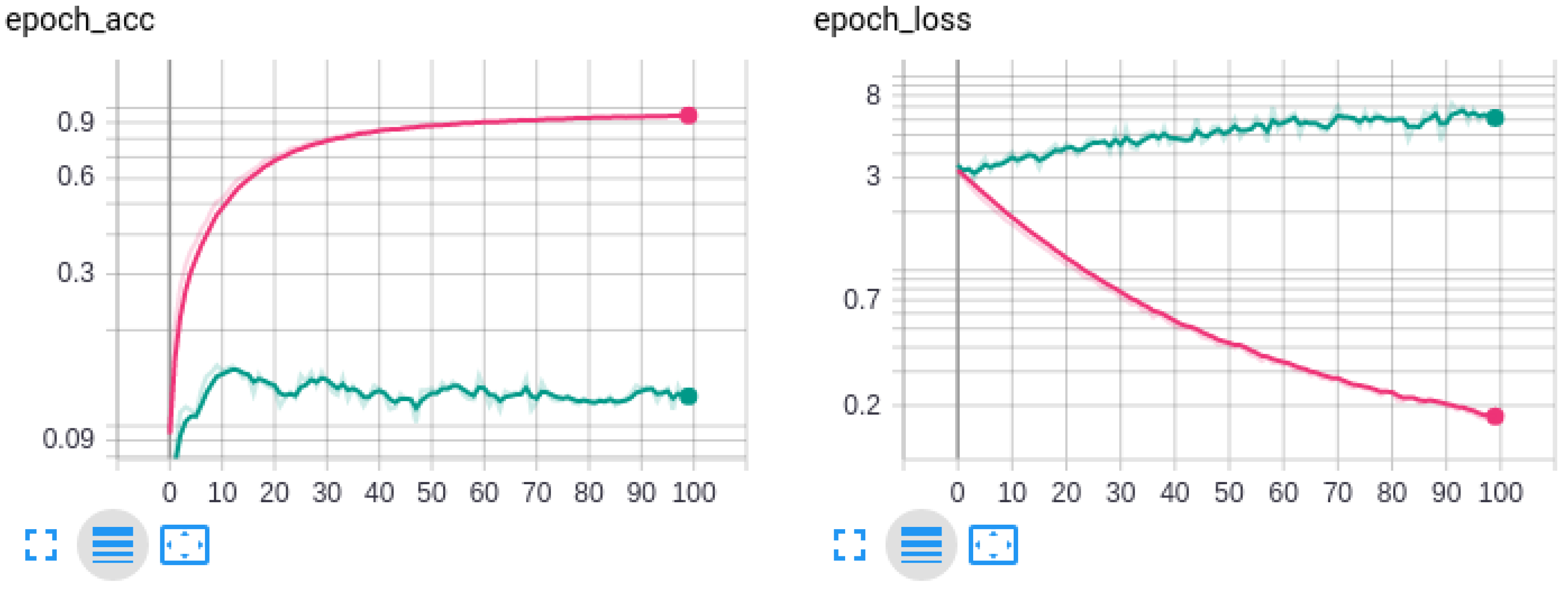
3.3.2. Soil classification using Convolutional Neural Networks
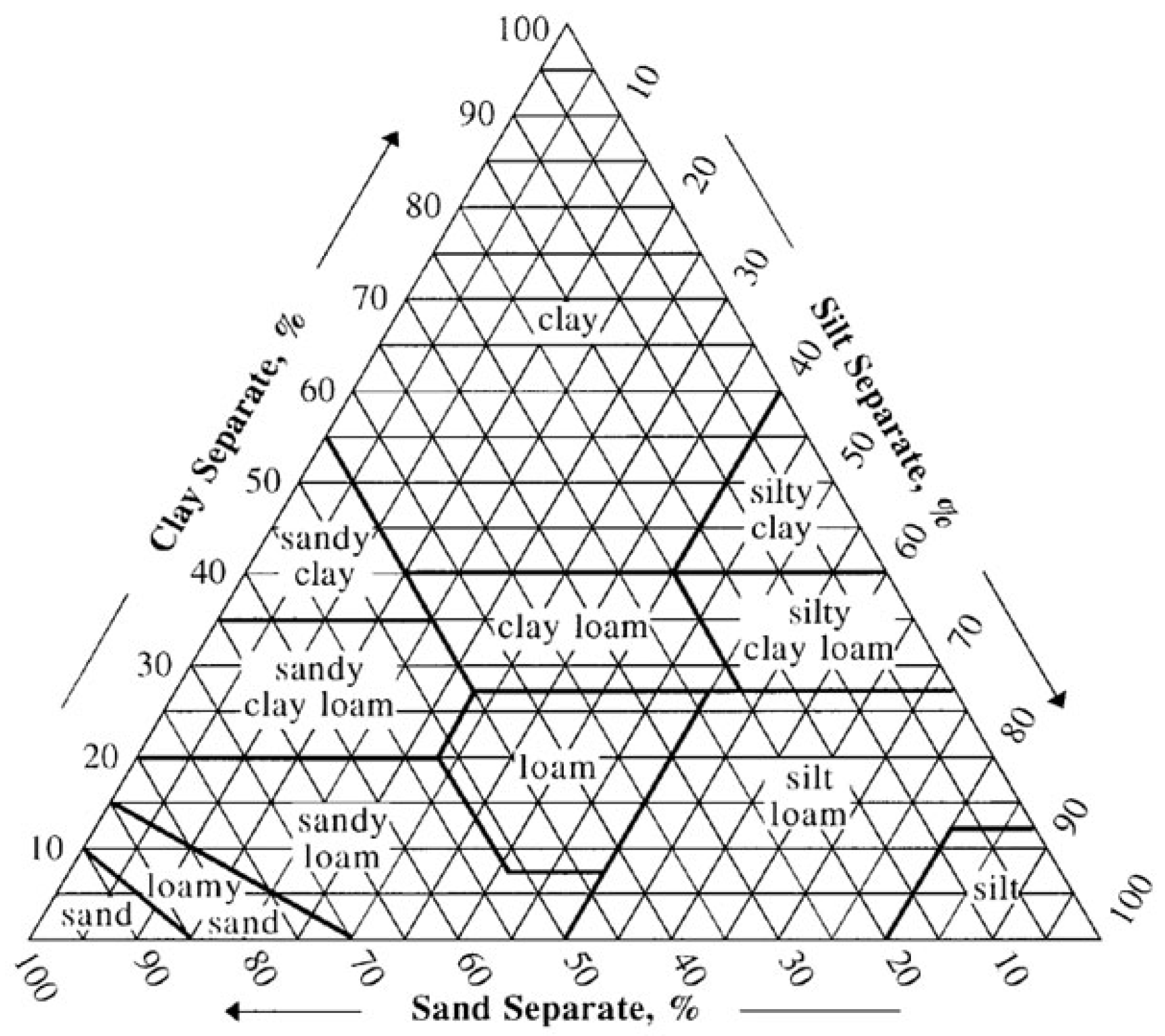
- Soils with strong human influence;
- Soils with limitations to root growth;
- Soils distinguished by Fe/Al chemistry;
- Pronounced accumulation of organic matter in the mineral topsoil;
- Accumulation of moderately soluble salts or non-saline substances;
- Soils with clay-enriched subsoil;
- Soils with little or no profile differentiation.
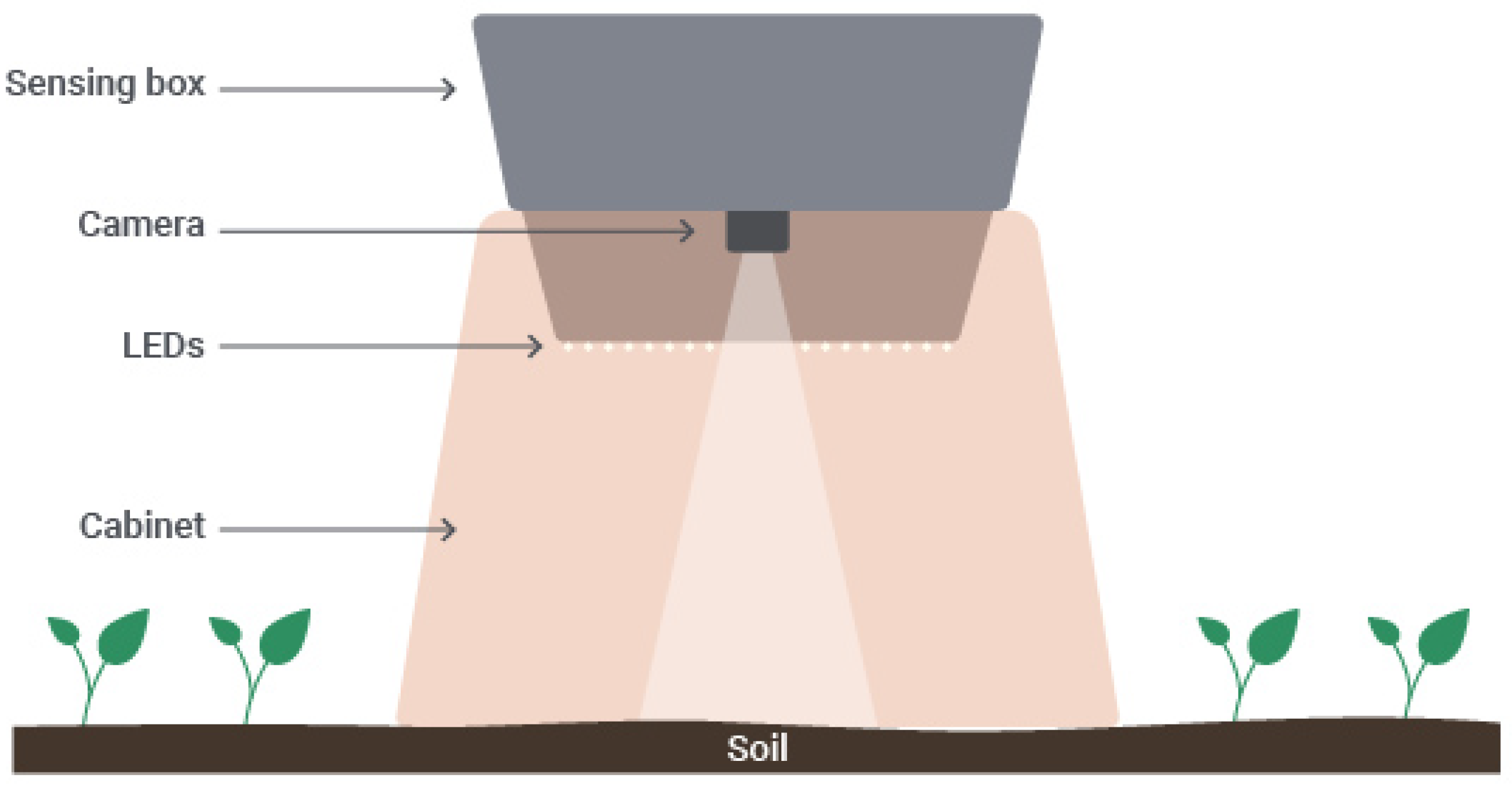
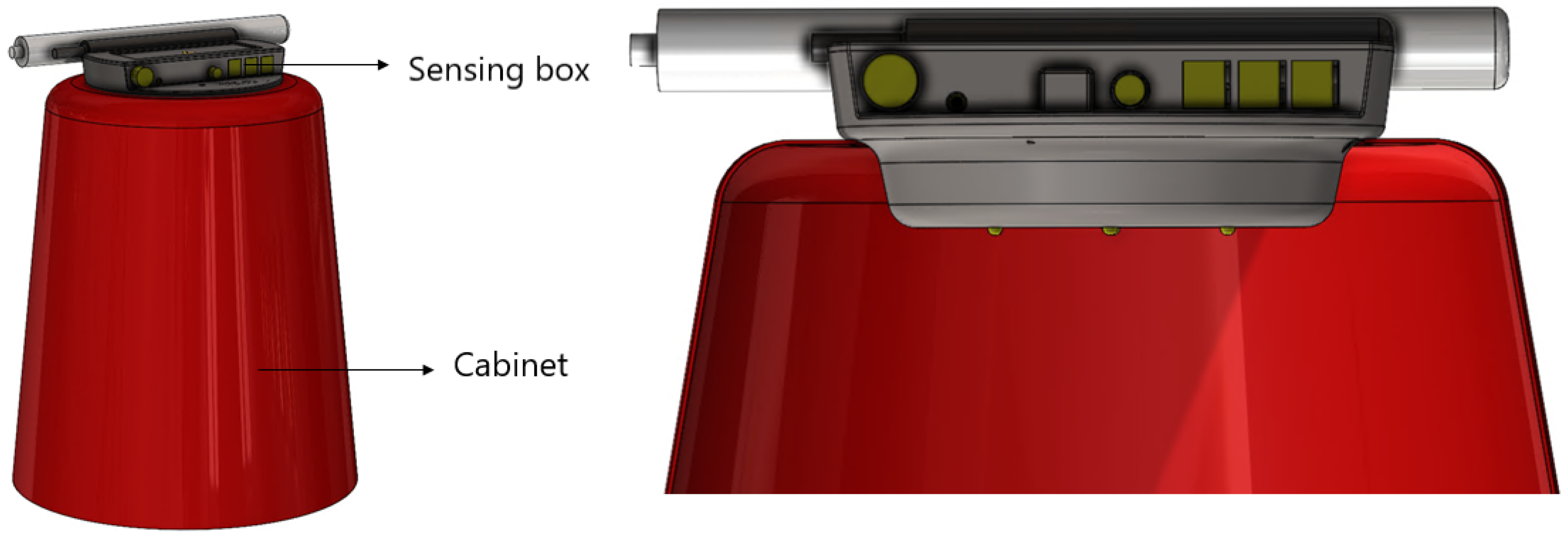
3.4. Casing Component
4. Proofs of Concept, Prototypes and Validations
4.1. Proofs of Concept
4.1.1. Soil Moisture
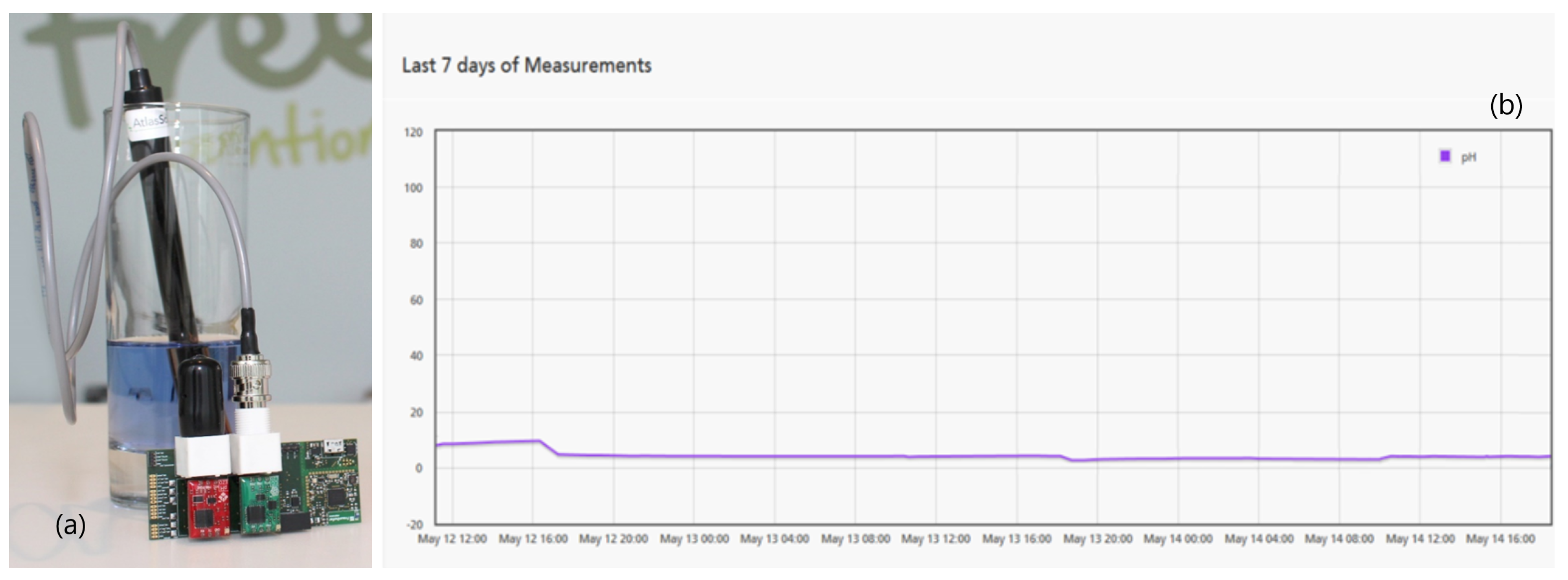
4.1.2. Soil pH
4.1.3. Ambient Temperature
4.1.4. Computer Vision
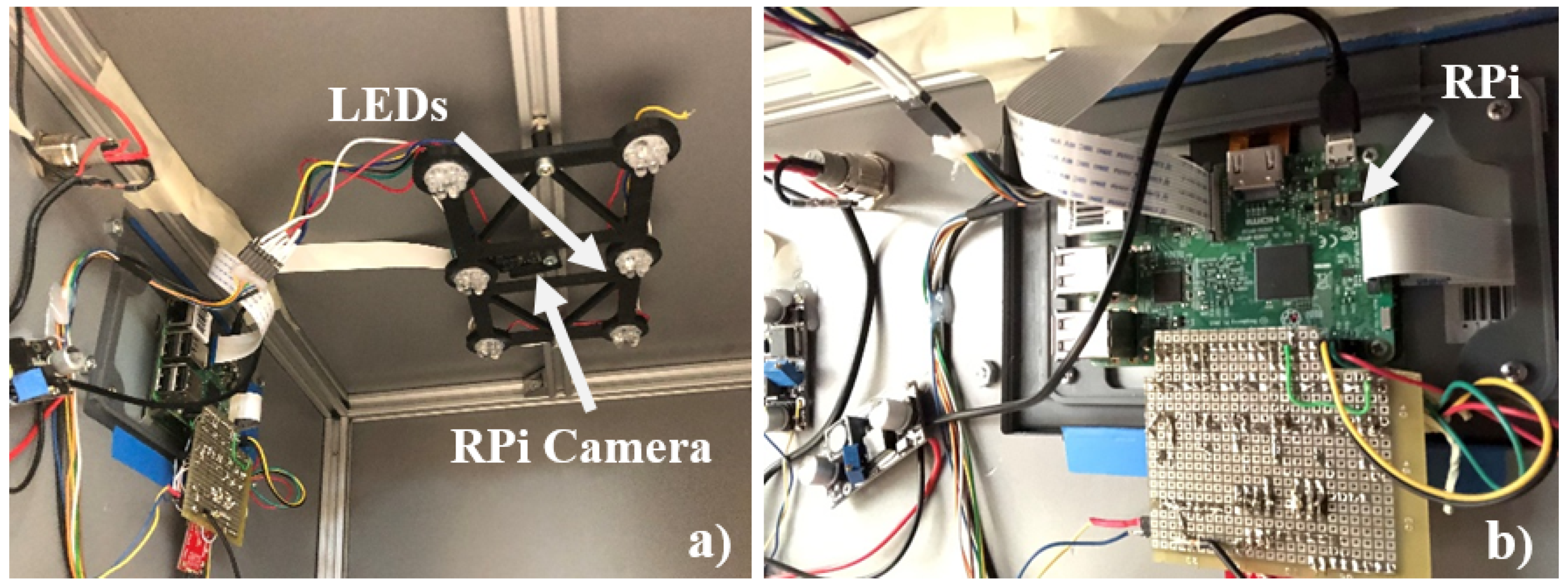
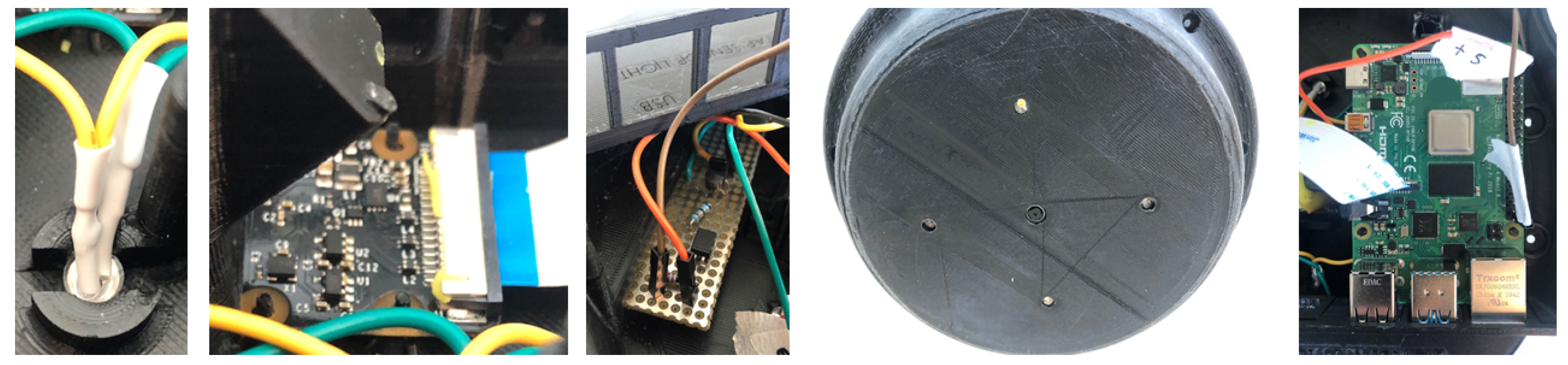
- Testing a set of image acquisition equipment such as the one presented in Figure 13. The controlled image acquisition setup tries to avoid light leakage and improve image quality of the soil images acquired.
- Evaluating contrast enhancement and thresholding techniques.
- Testing feature extraction in different colour spaces - the images accessed in the RGB colour space can be transformed in different colour spaces, and some computations performed, including the statistical, frequency and spatial frequency.
- These were initially considered using OpenCV, but later dropped due to the machine learning approach adopted.
4.2. Prototype Validations
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- AgriResearch. Digital Transformation in Agriculture and Rural Areas under Horizon 2020 Societal Challenge 2 (SC2). Report June 2019 Update. Available online: https://ec.europa.eu/info/sites/info/files/food-farming-fisheries/farming/documents/factsheet-agri-digital-transformation_en.pdf (accessed on 12 May 2020).
- BlueWeaveConsulting. Global Digital Farming Market by Component (Hardware, Software, Others), By Application (Precision Farming, Live Stock Monitoring, Green House Farming, Others), By Region, Global Forecast to 2025. Report BWC19388. Available online: https://www.blueweaveconsulting.com/global-digital-farming-market-bwc19388 (accessed on 12 May 2020).
- McDonagh, J.; Farrell, M.; Conway, S. The Role of Small-scale Farms and Food Security. In Sustainability Challenges in the Agrofood Sector; John Wiley & Sons: Hoboken, NJ, USA, 2017; pp. 33–47. [Google Scholar] [CrossRef]
- Biénabe, E.; Sautier, D. The role of small scale producers organizations to address market access. In International Semina Beyond Agricutlure: Making Markets Work for the Poor; Assets: London, UK, 2005. [Google Scholar]
- Oliveira, A., Jr.; Resende, C.; Gonçalves, J.; Soares, F.; Moreira, W. IoT Sensing Platform for e-Agriculture in Africa. In Proceedings of the 2020 IST-Africa Week Conference (IST-Africa), Kampala, Uganda, 6–8 May 2020. [Google Scholar]
- Project-AFRICA. On-Site Air-to-Fertilizer Mini-Plants Relegated by Sensor-Based ICT Technology to Foster African Agriculture. Available online: https://www.project-africa.info (accessed on 12 January 2020).
- Ayaz, M.; Ammad-Uddin, M.; Sharif, Z.; Mansour, A.; Aggoune, E.M. Internet-of-Things (IoT)-Based Smart Agriculture: Toward Making the Fields Talk. IEEE Access 2019, 7, 129551–129583. [Google Scholar] [CrossRef]
- Dlodlo, N.; Kalezhi, J. The internet of things in agriculture for sustainable rural development. In Proceedings of the 2015 International Conference on Emerging Trends in Networks and Computer Communications (ETNCC), Windhoek, Namibia, 17–20 May 2015; pp. 13–18. [Google Scholar]
- Dupont, C.; Sheikhalishahi, M.; Biswas, A.R.; Bures, T. IoT, big data, and cloud platform for rural African needs. In Proceedings of the 2017 IST-Africa Week Conference (IST-Africa), Windhoek, Namibia, 31 May–2 June 2017; pp. 1–7. [Google Scholar]
- Masinde, M. IoT applications that work for the African continent: Innovation or adoption? In Proceedings of the 2014 12th IEEE International Conference on Industrial Informatics (INDIN), Porto Alegre-RS, Brasil, 27–30 July 2014; pp. 633–638. [Google Scholar]
- Gichamba, A.; Waiganjo, P.; Orwa, D.; Wario, R.; Ngari, B. Prototyping mAgriculture applications among smallholder farmers. In Proceedings of the 2016 IST-Africa Week Conference, Durban, South Africa, 11–13 May 2016; pp. 1–7. [Google Scholar]
- Sousa, A.; Resende, C.; Pereira, A.; Moreira, W. Comm4Dev: Communication Infrastructure for Development. In Proceedings of the 10th EAI International Conference, AFRICOMM 2018, Dakar, Senegal, 29–30 November 2019. [Google Scholar]
- Oliveira, E.; Pereira, E.; Madureira, P.; Almeida, P.; Moreira, W. Community Tools for Digital Inclusion. In Proceedings of the 10th EAI International Conference, AFRICOMM 2018, Dakar, Senegal, 29–30 November 2019. [Google Scholar]
- Dupont, C.; Vecchio, M.; Pham, C.; Diop, B.; Dupont, C.; Koffi, S. An Open IoT Platform to Promote Eco-Sustainable Innovation in Western Africa: Real Urban and Rural Testbeds. Wirel. Commun. Mobile Comput. 2018, 2018, 1028578:1–1028578:17. [Google Scholar] [CrossRef]
- Vasisht, D.; Kapetanovic, Z.; Won, J.; Jin, X.; Chandra, R.; Sinha, S.; Kapoor, A.; Sudarshan, M.; Stratman, S. FarmBeats: An IoT Platform for Data-Driven Agriculture. In Proceedings of the 14th USENIX Symposium on Networked Systems Design and Implementation (NSDI 17), Boston, MA, USA, 27–29 March 2017; pp. 515–529. [Google Scholar]
- Zyrianoff, I.; Heideker, A.; Silva, D.; Kleinschmidt, J.; Soininen, J.P.; Salmon Cinotti, T.; Kamienski, C. Architecting and Deploying IoT Smart Applications: A Performance–Oriented Approach. Sensors 2020, 20, 84. [Google Scholar] [CrossRef] [PubMed]
- Kamienski, C.; Soininen, J.P.; Taumberger, M.; Dantas, R.; Toscano, A.; Salmon Cinotti, T.; Filev Maia, R.; Torre Neto, A. Smart Water Management Platform: IoT-Based Precision Irrigation for Agriculture. Sensors 2019, 19, 276. [Google Scholar] [CrossRef] [PubMed]
- Haseeb, K.; Ud Din, I.; Almogren, A.; Islam, N. An Energy Efficient and Secure IoT-Based WSN Framework: An Application to Smart Agriculture. Sensors 2020, 20, 2081. [Google Scholar] [CrossRef] [PubMed]
- García, L.; Parra, L.; Jimenez, J.M.; Lloret, J.; Lorenz, P. IoT-Based Smart Irrigation Systems: An Overview on the Recent Trends on Sensors and IoT Systems for Irrigation in Precision Agriculture. Sensors 2020, 20, 1042. [Google Scholar] [CrossRef] [PubMed]
- Abba, S.; Wadumi Namkusong, J.; Lee, J.A.; Liz Crespo, M. Design and Performance Evaluation of a Low-Cost Autonomous Sensor Interface for a Smart IoT-Based Irrigation Monitoring and Control System. Sensors 2019, 19, 3643. [Google Scholar] [CrossRef] [PubMed]
- Spachos, P. Towards a Low-Cost Precision Viticulture System Using Internet of Things Devices. IoT 2020, 1, 2. [Google Scholar] [CrossRef]
- LaMotte Soil Testing Kits and Equipment. Available online: http://www.lamotte.com/en/soil (accessed on 8 May 2020).
- Mettler Toledo—pH Sensor. Available online: https://www.mt.com/int/en/home/products/Laboratory_Analytics_Browse/pH-meter/sensor/pH-sensor.html (accessed on 14 April 2020).
- Mettler Toledo—pH Electrode InLab Solids. Available online: https://www.mt.com/int/en/home/products/Laboratory_Analytics_Browse/pH-meter/sensor/pH-sensor/InLab-Solids.html#accessories (accessed on 14 April 2020).
- Mettler Toledo—pH Electrode InLab Solids Go-ISM. Available online: https://www.mt.com/int/en/home/products/Laboratory_Analytics_Browse/pH-meter/sensor/pH-sensor/InLab-Solids-Go-ISM.html (accessed on 14 April 2020).
- Pi NoIR Camera V2. Available online: https://www.raspberrypi.org/products/pi-noir-camera-v2/ (accessed on 4 April 2020).
- Adafruit—Proto-Screwshield (Wingshield) R3 Kit for Arduino. Available online: https://www.adafruit.com/product/196 (accessed on 4 April 2020).
- Coppock, J. Development of a Raspberry Pi Based, SDI-12 Sensor Environmental Data Logger, Bachelor of Engineering (Electrical and Electronics), Faculty of Engineering and Surveying. Available online: https://eprints.usq.edu.au/29188/1/Coppock_J_BowtellHills.pdf (accessed on 10 May 2020).
- DFRobot—Gravity: Analog Spear Tip pH Sensor / Meter Kit. Available online: https://www.dfrobot.com/product-1668.html (accessed on 4 April 2020).
- Sentek—Drill & Drop Sensor Technology. Available online: https://sentektechnologies.com/product-range/soil-data-probes/drill-and-drop/ (accessed on 4 April 2020).
- Sentek—Soil Moisture & Temperature Sensor. Available online: https://www.seeedstudio.com/Soil-Moisture-Temperature-Sensor-p-1356.html (accessed on 4 April 2020).
- Adafruit BME280 I2C or SPI Temperature Humidity Pressure Sensor. Available online: https://www.adafruit.com/product/2652 (accessed on 4 April 2020).
- Seeed Technology Co., Ltd. Grove—Digital Light Sensor—TSL2561. Available online: https://www.seeedstudio.com/Grove-Digital-Light-Sensor-TSL2561.html (accessed on 4 April 2020).
- ZeroMQ—An Open-Source Universal Messaging Library. Available online: https://zeromq.org/ (accessed on 4 April 2020).
- Blackledge, J. Digital Image Processing: Mathematical and Computational Methods; Loughborough University: Leicestershire, UK, 2005. [Google Scholar]
- Rosado, L.; Vasconcelos, M.; Ferreira, M. A Mobile-Based Prototype for Skin Lesion Analysis: Towards a Patient-Oriented Design Approach. Int. J. Online Eng. 2013, 9, 27. [Google Scholar] [CrossRef]
- Vasconcelos, M.J.M.; Rosado, L.; Ferreira, M. A new risk assessment methodology for dermoscopic skin lesion images. In Proceedings of the 2015 IEEE International Symposium on Medical Measurements and Applications (MeMeA) Proceedings, Torino, Italy, 7–9 May 2015; pp. 570–575. [Google Scholar]
- Rosado, L.; Gonçalves, J.; Costa, J.; Ribeiro, D.; Soares, F. Supervised learning for Out-of-Stock detection in panoramas of retail shelves. In Proceedings of the IEEE International Conference on Imaging Systems and Techniques (IST), Chania, Crete, Greece, 4–6 October 2016; pp. 406–411. [Google Scholar]
- Kasparis, T.; Charalampidis, D.; Georgiopoulos, M.; Rolland, J. Segmentation of textured images based on fractals and image filtering. Pattern Recognit. 2001, 34, 1963–1973. [Google Scholar] [CrossRef]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE conference on computer vision and pattern recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4510–4520. [Google Scholar]
- Han, P.; Dong, D.; Zhao, X.; Jiao, L.; Lang, Y. A smartphone-based soil color sensor: For soil type classification. Comput. Electron. Agric. 2016, 123, 232–241. [Google Scholar] [CrossRef]
- Van Huyssteen, C.; Turner, D.; Le Roux, P. Principles of soil classification and the future of the South African system. S. Afr. J. Plant Soil 2013, 30, 23–32. [Google Scholar] [CrossRef]
- Wrb, I.W.G. World Reference Base for Soil Resources 2014, Update 2015: International Soil Classification System for Naming Soils and Creating Legends for Soil Maps. Available online: http://www.fao.org/3/a-i3794en.pdf (accessed on 10 May 2020).
- Ribeiro, E.; Batjes, N.; Oostrum, A. World Soil Information Service (WoSIS)–Towards the Standardization and Harmonization of World Soil Data. Available online: https://www.isric.org/sites/default/files/isric_report_2018_01.pdf (accessed on 10 May 2020).
- Soil Texture Calculator | NRCS Soils. Available online: https://www.nrcs.usda.gov/wps/portal/nrcs/detail/soils/survey/?cid=nrcs142p2_054167 (accessed on 15 May 2020).
- Scarnò, M.; Ballin, M.; Barcaroli, G.; Masselli, M. Redesign sample for Land Use/Cover Area frame Survey (LUCAS) 2018. Stat. Work. Pap. Eurostat 2018. [Google Scholar] [CrossRef]
- Africa Soil Information Service. Available online: http://africasoils.net/ (accessed on 4 April 2020).
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE conference on computer vision and pattern recognition, Chania, Crete, Greece, 4–6 October 2016; pp. 2818–2826. [Google Scholar]
- Zoph, B.; Vasudevan, V.; Shlens, J.; Le, Q.V. Learning transferable architectures for scalable image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 19–21 June 2018; pp. 8697–8710. [Google Scholar]
- Maas, A.L.; Hannun, A.Y.; Ng, A.Y. Rectifier nonlinearities improve neural network acoustic models. Proc. ICML 2013, 30, 3. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Keras—TensorFlow Core. Available online: https://www.tensorflow.org/guide/keras (accessed on 1 May 2020).
- PANDLETS—Personal Area Dots: Letting Everything Sense. Available online: https://www.aicos.fraunhofer.pt/en/our_work/projects/pandlets.html (accessed on 1 May 2020).
- Internet of Things in Package: Wafer Level Modular Architecture for Internet of Things. Available online: https://https://www.aicos.fraunhofer.pt/en/our_work/projects/iotip.html (accessed on 1 May 2020).
- Damiano, S.; Smith, S.H.A.A.; Hicks, S.; Aufdenkampe, A. Arduino-SDI-12. Available online: https://github.com/EnviroDIY/Arduino-SDI-12 (accessed on 1 May 2020).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3 Classes | 7 Classes | |||
|---|---|---|---|---|
| Architectures | Accuracy | Loss | Accuracy | Loss |
| VGG16 | 41.48% | 8.2 | 24.66% | 10.11 |
| InceptionV3 | 36.73% | 7.76 | 27.17% | 5.07 |
| MobileNetV2 | 38.07% | 4.29 | 26.43% | 5.2 |
| NASNetMobile | 38.74% | 7.84 | 28.25% | 5.04 |
| ColorTexture | 39.75% | 1.96 | 23.81% | 2.77 |
| 3 Classes | 7 Classes | |||
|---|---|---|---|---|
| Architectures | Accuracy | Loss | Accuracy | Loss |
| VGG16 | 64.25% | 0.92 | 26.88% | 2.17 |
| InceptionV3 | 57.21% | 0.90 | 27.55% | 5.13 |
| MobileNetV2 | 56.87% | 1.31 | 27.23% | 5.17 |
| NASNetMobile | 61.07% | 2.24 | 28.48% | 1.85 |
| ColorTexture | 63.27% | 0.97 | 32.45% | 2.27 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oliveira-Jr, A.; Resende, C.; Pereira, A.; Madureira, P.; Gonçalves, J.; Moutinho, R.; Soares, F.; Moreira, W. IoT Sensing Platform as a Driver for Digital Farming in Rural Africa. Sensors 2020, 20, 3511. https://doi.org/10.3390/s20123511
Oliveira-Jr A, Resende C, Pereira A, Madureira P, Gonçalves J, Moutinho R, Soares F, Moreira W. IoT Sensing Platform as a Driver for Digital Farming in Rural Africa. Sensors. 2020; 20(12):3511. https://doi.org/10.3390/s20123511
Chicago/Turabian StyleOliveira-Jr, Antonio, Carlos Resende, André Pereira, Pedro Madureira, João Gonçalves, Ruben Moutinho, Filipe Soares, and Waldir Moreira. 2020. "IoT Sensing Platform as a Driver for Digital Farming in Rural Africa" Sensors 20, no. 12: 3511. https://doi.org/10.3390/s20123511
APA StyleOliveira-Jr, A., Resende, C., Pereira, A., Madureira, P., Gonçalves, J., Moutinho, R., Soares, F., & Moreira, W. (2020). IoT Sensing Platform as a Driver for Digital Farming in Rural Africa. Sensors, 20(12), 3511. https://doi.org/10.3390/s20123511