1. Introduction
Underwater wireless sensor networks (UWSNs) have been applied in various oceanography missions such as underwater pollution detection, offshore oil extraction, and surveillance where human operation is impossible [
1,
2,
3,
4,
5]. Since the main function of UWSNs is to process extracted data and transmit them to remote locations, network connectivity is one of the most fundamental problems in UWSNs [
6]. Due to unstable underwater environment, limited availability, and non-rechargeability of sensor nodes, the design of UWSNs would reduce cost, be robust to node failures, reduce communication overhead, and guarantee a high level of network connectivity [
7,
8,
9].
Connectivity is affected by communication range of the sensor node, which ensures that every sensor node is connected to the surface BS directly or through a multi-hop path [
10]. Compared with electromagnetic wave (EM), acoustic wave is able to propagate much longer distances in the ocean, which is often used as the media for information exchange in UWSNs. However, the acoustic wave during propagation suffers from multipath effect, channel fading, and ambient noise; as a result, it is a great challenge to establish reliable communication links among different nodes of UWSNs [
11,
12,
13]. Furthermore, the acoustic spectrum becomes more and more scarce with the increasing usage of underwater acoustic systems [
14]. The underwater acoustic multi-input-multi-output (MIMO) system may be used to satisfy the long-range and high-throughput requirements [
15,
16]. However, many wireless devices cannot support multiple antennas due to size, cost, and/or hardware limitations in practice. Hence, cooperative MIMO is adopted, the basic idea of which is to group multiple devices into virtual antenna arrays to emulate MIMO communications. Multiple sensor nodes cooperatively transmit the same signals to a receiver and the receiving power gain is enhanced. Consequently, it can sufficiently increase the range of wireless links without amplifying the transmission power, while saving the energy of each transmitting agent [
17]. The virtual antenna array composed of multiple devices in cooperative MIMO relies on wireless communication among the sensor nodes. It requires that all the participating nodes share the same transmitted signals and carrier frequency, and they have accurate synchronous clocks.
However, underwater acoustic channels are not proper for the synchronization as the low propagation speed takes long synchronization time and has large synchronization errors. As a popular near-field communication technique, magnetic induction (MI) has great potential in UWSNs because it can provide a constant channel, high data rate, and negligible propagation delay with the underwater propagation speed of
m/s [
18,
19,
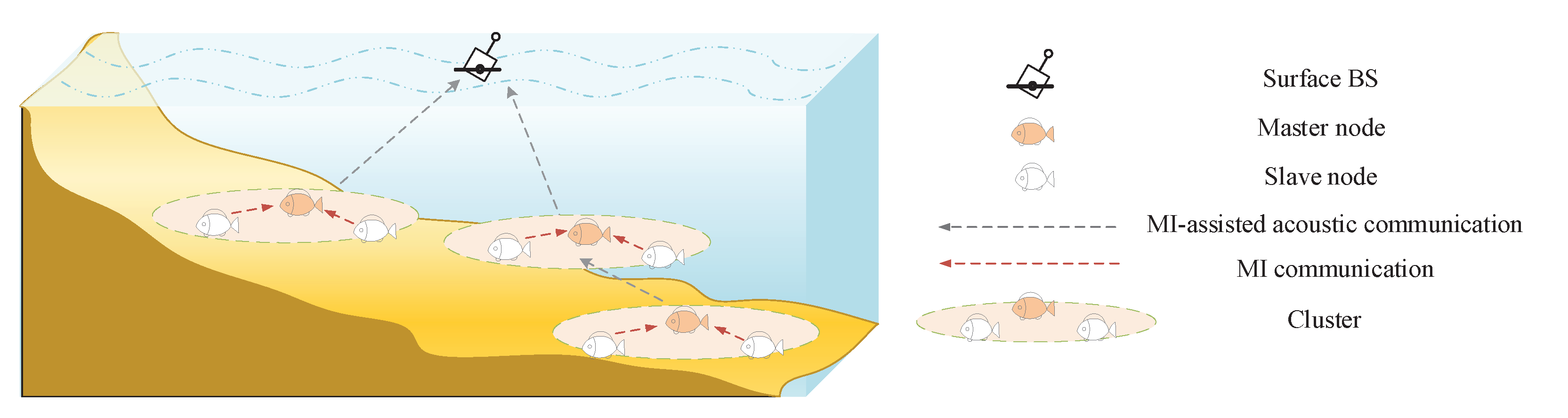
20]. Such high speed signal propagation is able to significantly facilitate the synchronization of distributed nodes, which enables the long distance underwater communication and high throughput. Therefore, heterogeneous wireless underwater sensor networks adopting MI-assisted acoustic cooperative MIMO are proposed [
21]. In such networks, the distributed nodes are divided into multiple clusters by region, as shown in
Figure 1. Each cluster consists of one master sensor node and multiple slave sensor nodes. The information exchange between different clusters are realized by the cooperative MIMO, while MI communication among intra-cluster nodes guarantee the accurate synchronization. The system architecture and process diagram of underwater MI-assisted acoustic cooperative MIMO networks are introduced in
Section 2, and much more details can be also found in [
21].
The performance of the underwater MI-assisted acoustic cooperative MIMO networks is obtained in [
21], in which the performance gain of underwater MI-assisted acoustic cooperative MIMO networks is validated in terms of synchronization errors, signal-to-noise ratio (SNR), effective communication time, and the upper bound of the throughput in physical layer. In this paper, we focus on the system level performance of underwater MI-assisted acoustic cooperative MIMO networks in terms connectivity and analyze the impact of clock synchronization on connectivity. Because of the complex channel characteristics and the heterogeneous network architecture, the connectivity analysis of MI-assisted acoustic cooperative MIMO networks is much more complicated than that of UWSNs. In particular, the acoustic cooperative MIMO and MI communications are performed in inter-cluster and intra-cluster manners, respectively. Therefore, the underwater acoustic channel and MI channel should both be considered, which increases the complexity of connectivity analysis of the networks. Besides the complex channel characteristics, the heterogeneous architecture of MI-assisted acoustic cooperative MIMO networks also poses a great challenge for connectivity analysis. Compared with the traditional UWSNs [
7,
22], the inter-cluster and intra-cluster connectivity need to be calculated. Meanwhile, the synchronization error is inevitable in the connectivity analysis of the networks.
Without loss of generality, the networks are supposed to be deployed in the bounded three-dimensional space
. In this underwater MI-assisted acoustic cooperative MIMO networks, the clusters are distributed according to a homogeneous Poisson point process and the nodes in a cluster are distributed according to another homogeneous Poisson point process. When considering the probability that a certain cluster can be directly connected with surface BS, it is not only related to its position in space
, but also related to the maximum transmission range of the cluster, which depends on the number of nodes in the cluster [
23]. When considering the multi-hop fashion, some work has been well explored to analyze the connectivity of wireless sensor networks assuming two-dimensional coordinates [
24]. We extend it to the three-dimensional scene in this network model and give the upper and lower bounds of connectivity.
The major contributions of this paper can be summarized as follows:
A mathematical model is developed to analyze the connectivity of underwater MI-assisted acoustic cooperative MIMO networks, which considers the three-dimensional underwater bounded environment. Connectivity probabilities of direct and multi-hop fashions are derived.
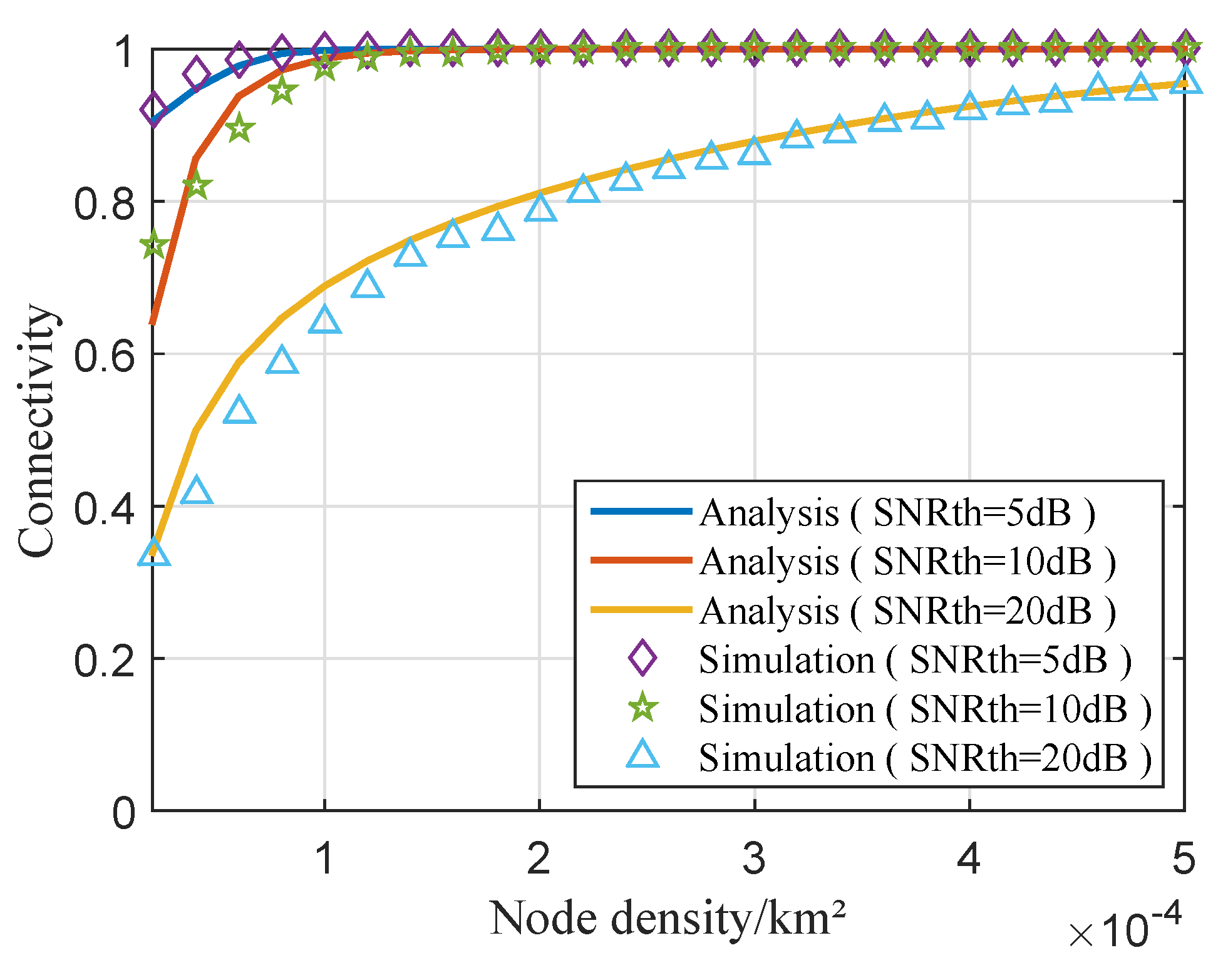
Due to the characteristics of heterogeneous networks, inter-cluster and intra-cluster connectivities need to be calculated, and the influence of synchronization errors on connectivity is also considered. Monte Carlo simulations were carried out, and the results agree well with the analytical model that validate the accuracy of the model.
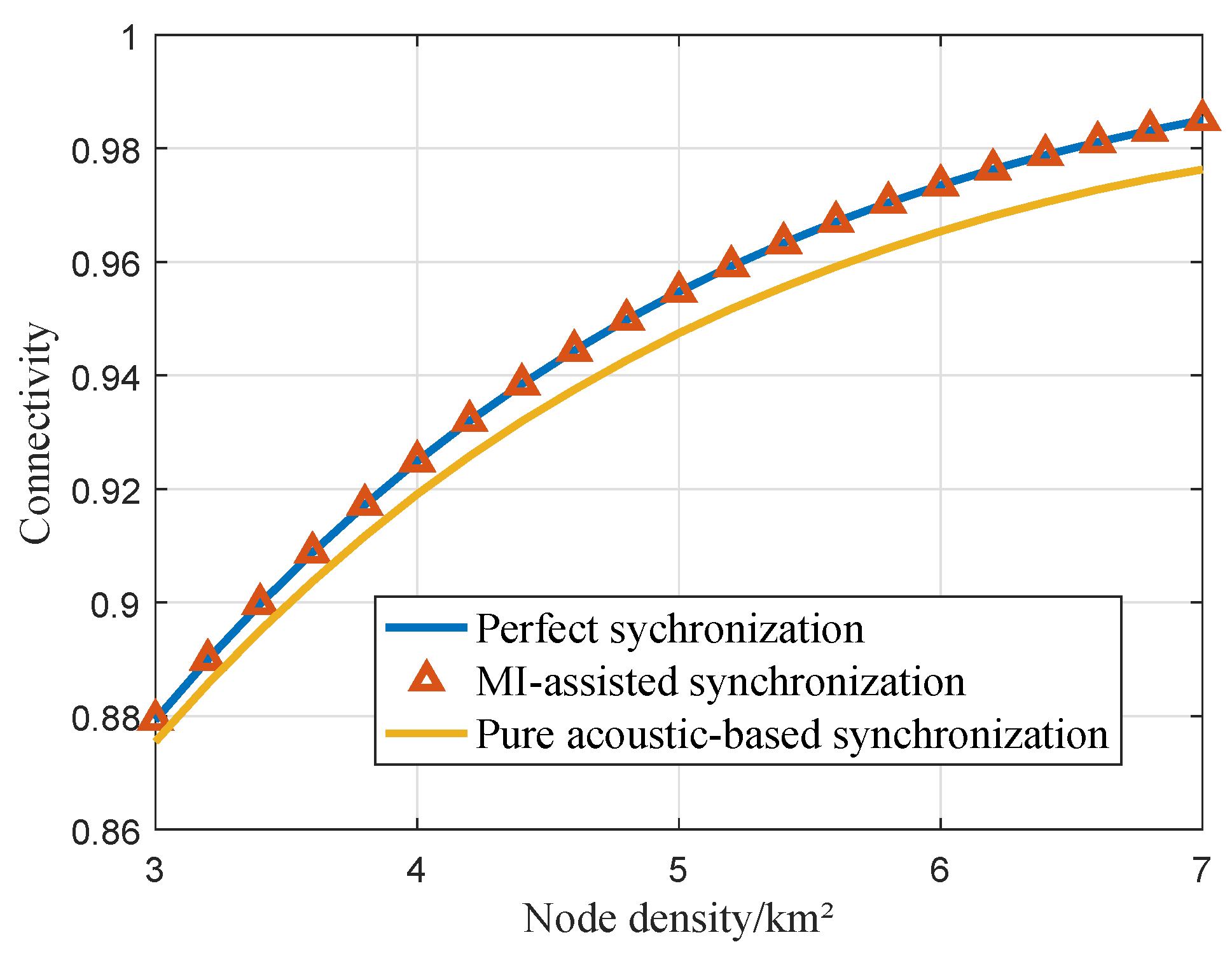
Based on the framework, we present numerical and simulation results that quantitatively analyze the effects of various system parameters on the connectivity in this networks, considering the effects of channel characteristics, operating frequency, operating range, and density of nodes. The results provide the guideline for the deployment of underwater MI-assisted acoustic cooperative MIMO networks according to the practical requirement.
The remainder of this paper is organized as follows. In
Section 2, a brief introduction to the network architecture of underwater MI-assisted acoustic cooperative MIMO networks is given. Based on the system architecture, the connectivity problem is formulated in
Section 3. In
Section 4, the transmission ranges of node and cluster are derived. Next, connectivity probabilities of direct and multi-hop fashions are further analyzed in
Section 5. In
Section 6, the connectivity performance evaluation by Monte Carlo simulations is presented. Finally, the conclusions of this paper are drawn in
Section 7.
3. Problem Formulation
Based on the system architecture and operation mechanism of underwater MI-assisted acoustic cooperative MIMO networks given in
Section 2, the problem of connectivity analysis is formulated in this section.
Without loss of generality, the network is supposed to be deployed in a bounded 3D space . In this area, the clusters are regarded as independent units, which are distributed according to a homogeneous Poisson point process with the density of . The nodes in one certain cluster are subject to another homogeneous Poisson distribution with the density of .
In MI-assisted acoustic cooperative MIMO networks, a cluster with
k nodes and the surface BS can successfully establish a connected link if and only if the following two conditions are satisfied: (1)
slave nodes can connect topologically with the master node; and (2) the cluster with
k nodes participating in cooperative MIMO and the surface BS can connect topologically via a direct link or a multi-hop fashion. Specifically, the definitions of node connected and cluster connected are provided as follow [
24]:
Definition 1. When there is a master node within the maximum transmission range of the slave node, it is considered that it can connect to the master node, and the slave node is defined as connected.
Definition 2. When the surface BS is within the maximum transmission range of the cluster, it is considered that it can connect to the surface BS directly, and the cluster is defined as connected.
Definition 3. When there are relays that can connect topologically with each other until the surface BS, it is considered that it can connect to the surface BS in multi-hop fashion, and the cluster is defined as connected.
From the above definitions, the connectivity of the
jth cluster in the networks can be defined as
where
is probability that the
jth cluster including
k nodes connects to the surface BS, denoted as Equation (
18), and
is the probability that there are
k nodes participating in the cooperative MIMO in the
jth cluster, indicated as Equation (
19). Specifically,
where
is the position of the
jth cluster, and
is the probability that the
jth cluster at
is connected to the surface BS, which depends on the distribution and maximum transmission range of the cluster. As the maximum transmission range of the cluster depends on the number of nodes participating in the cooperative MIMO, the maximum transmission range of the cluster with
k nodes is recorded as
.
According to Definition 1, we have
where
and
is the maximum transmission range of the node. Substituting Equations (
18) and (
19) into Equation (
17), we have
From Equation (
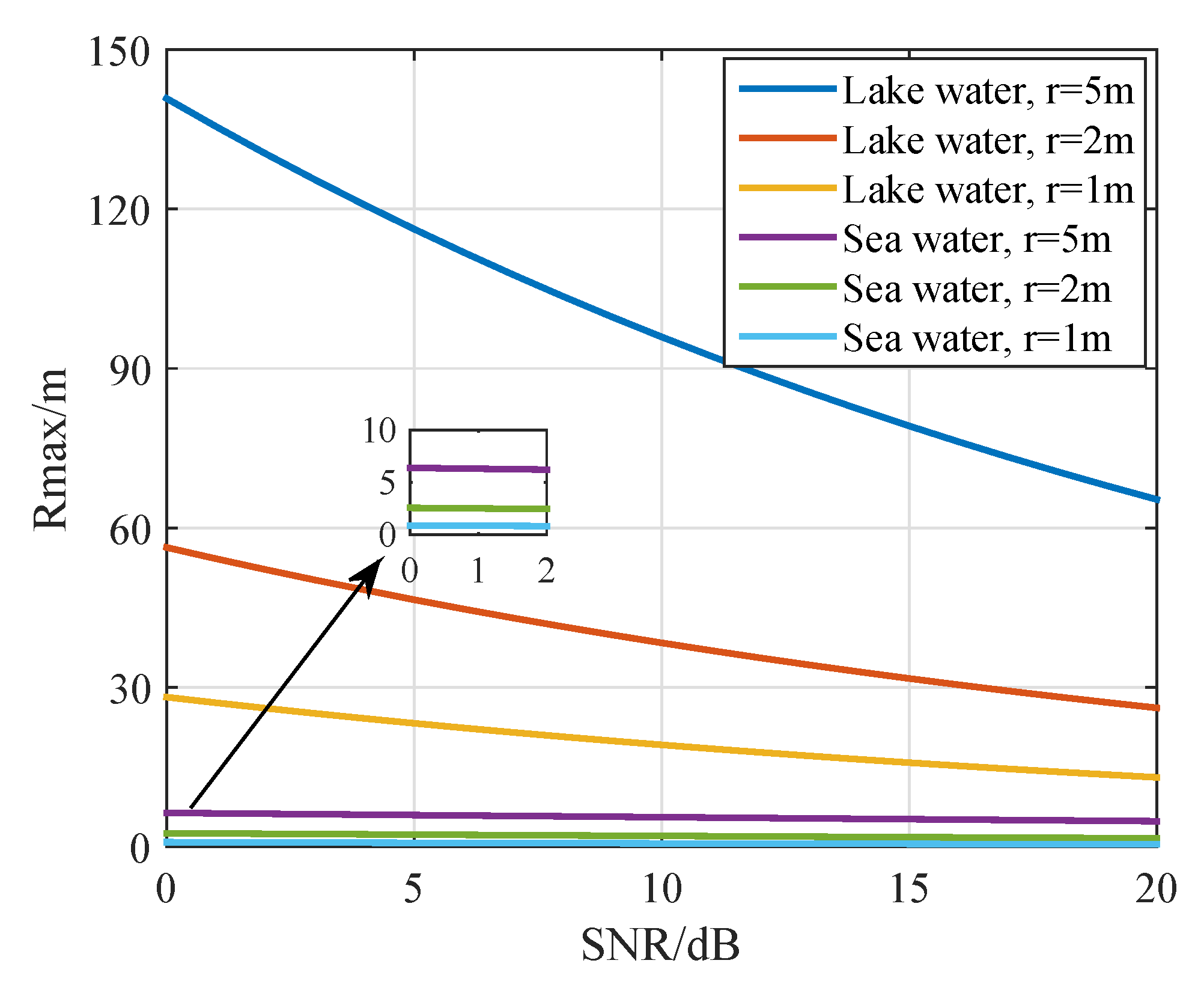
20), to derive the connectivity probability
, the following terms are requested: the maximum transmission range of the node
, the maximum transmission range of the cluster
, and the probability that the
jth cluster at
connects to the surface BS
. These are analyzed in the following sections.
5. Connectivity Analysis
From the problem formulation in
Section 3, the probability
participates in the connectivity analysis. This section provides the derivations of
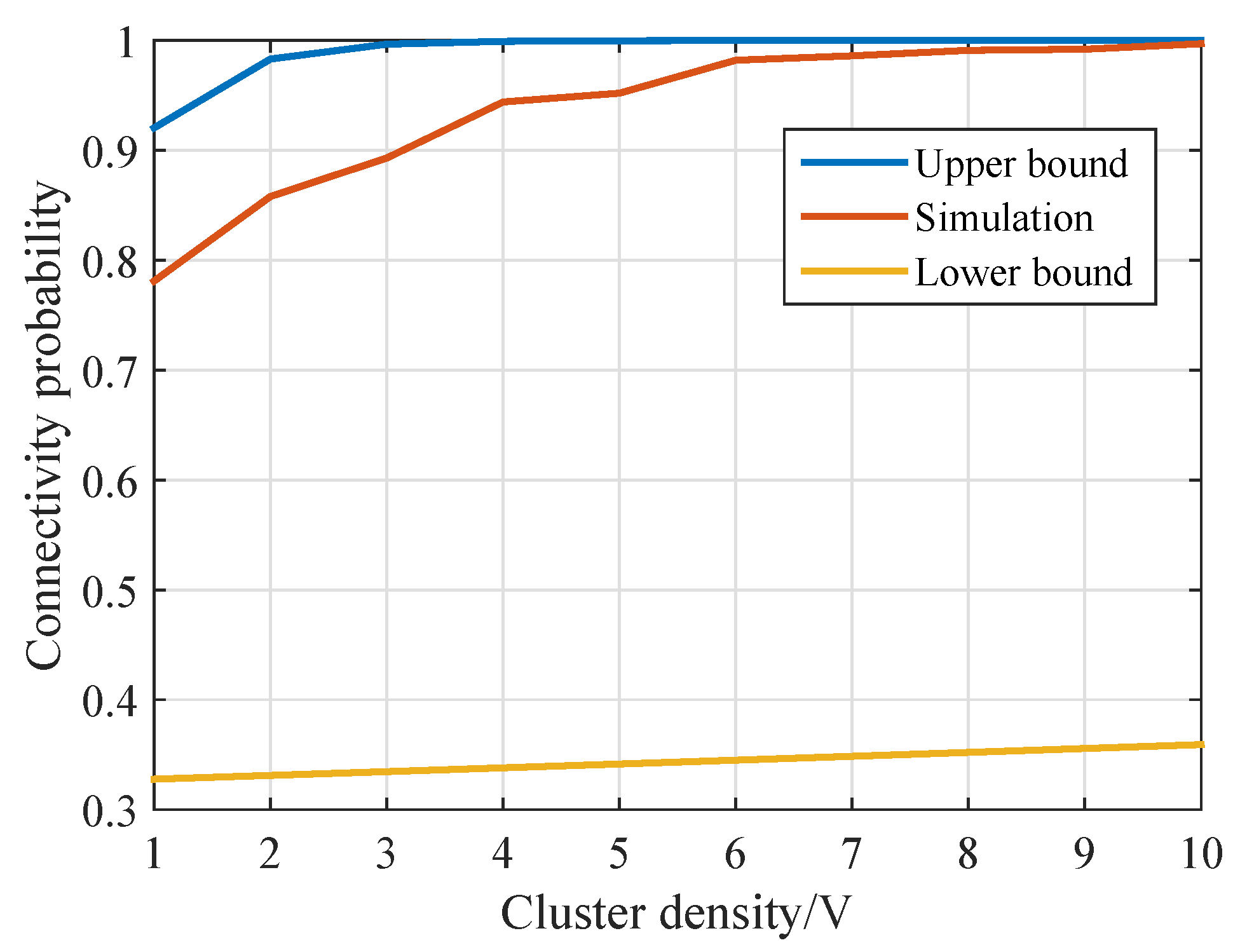
in direct and multi-hop fashions. As the analysis form of
in multi-hop is very complicated, the lower and upper bounds are developed, which can provide the guidelines for the networks design in practice.
5.1. Directly Connected
Without loss of generality, it is supposed that the
is a
cube. There is a surface BS and
m clusters (
) distributed in the
. According to the homogeneous distribution of the clusters,
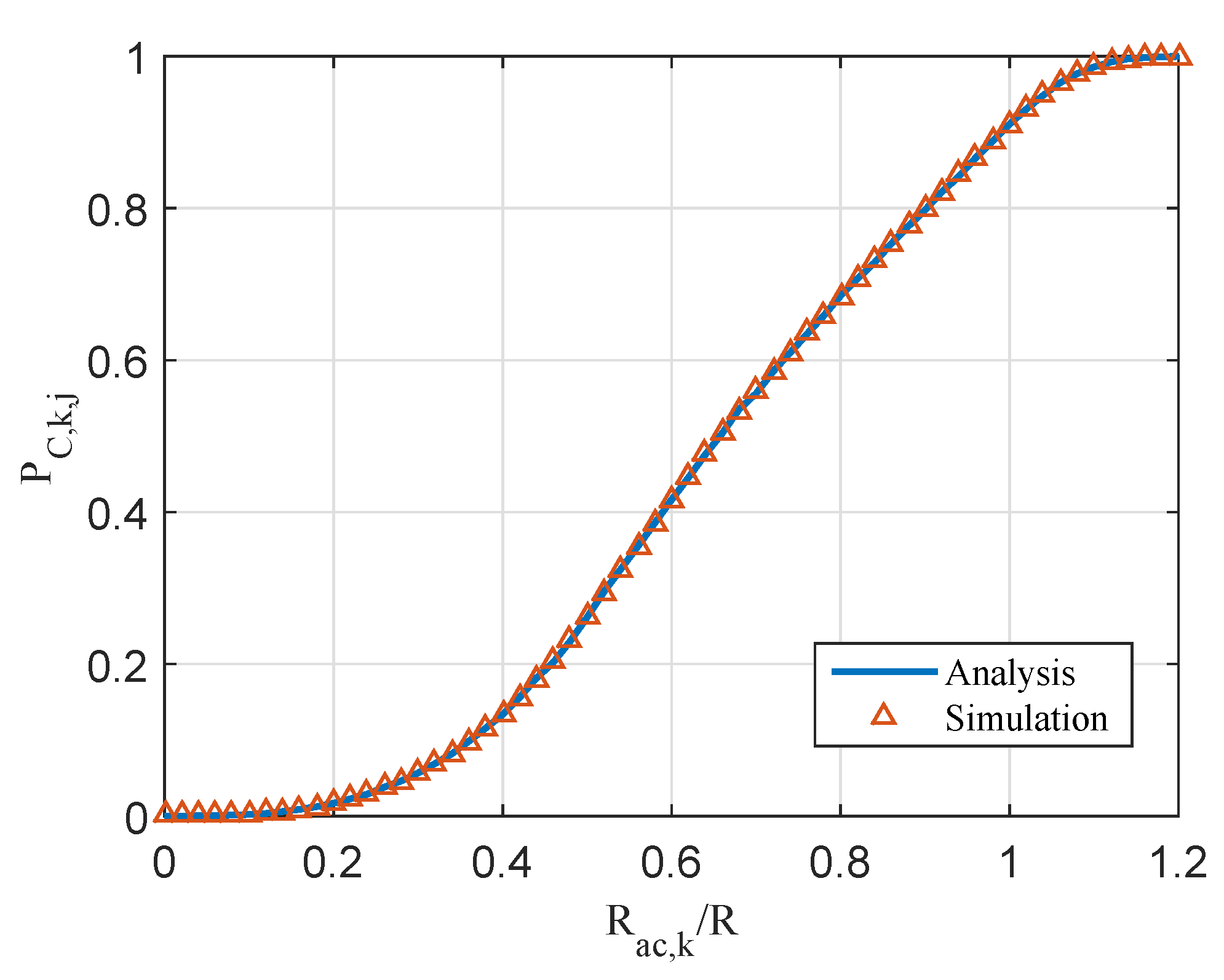
is the probability that the
jth cluster falls into the hemisphere with surface BS as the center of the sphere and the radius of
. We define the area
where clusters can establish a direct link with surface BS. Therefore,
can be derived as
where
. However, when considering the boundary effect, the transmission range
gets larger with the increase of the number of intra-cluster nodes. Based on the values of
and
R,
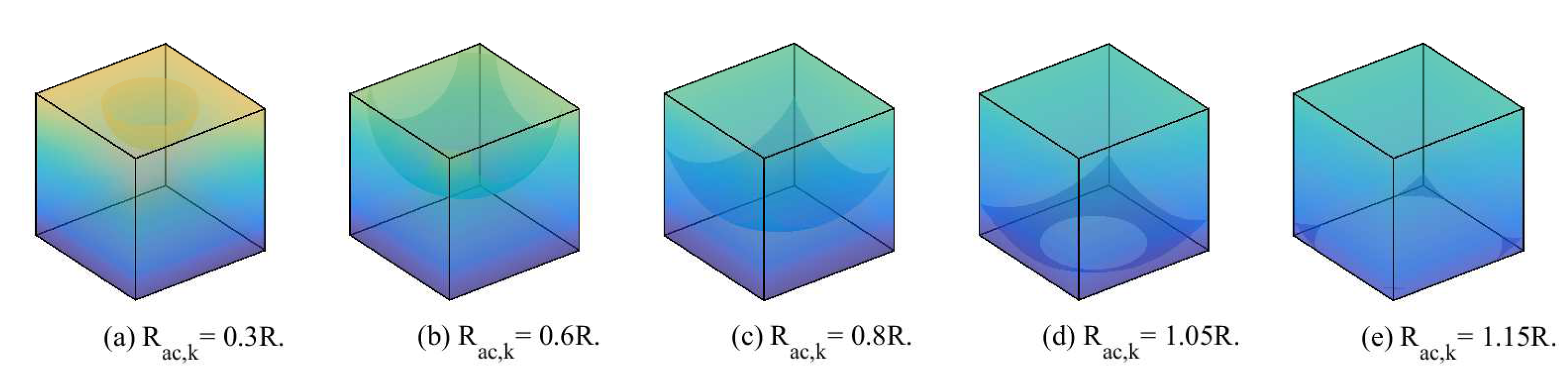
can be calculated as:
Case 1: When
,
is a hemisphere, as shown in
Figure 3a. We have
Case 2: When
, the hemisphere partially extends beyond the sides of the cube to form four hemispheric crowns, as shown in
Figure 3b. We have
Case 3: When
, the hemisphere extends beyond the sides of the cube and does not reach the bottom of the cube, as shown in
Figure 3c.
is calculated by calculus. We have
Case 4: When
, the hemisphere extends beyond the sides of the cube and extends beyond the bottom of the cube to form a spherical crown, as shown in
Figure 3d. We have
Case 5: When
,
continues to increase, the hemisphere does not completely contain the entire cube, as shown in
Figure 3e. We have
Case 6: When , the cluster at any point in can be connected to BS, and then .
Based on the above analysis,
can be calculated as Equation (
39).
5.2. Lower Bound of Connectivity Probability in Multi-Hop Fashion
Assuming there is a connected link with a relay cluster
B between the cluster
A and surface BS, there are
a nodes in cluster
A and
b nodes in relay cluster
B. Then, the connectivity probability can be calculated as
where
is the probability that the cluster
A has
a nodes,
is the probability that the relay
B has
b nodes,
is the probability that the cluster
A is connected with relay
B, and
is the probability that the relay
B is connected with surface BS. Furthermore,
From the above analysis, the lower bound of the connectivity probability can be obtained by assuming that all clusters have the same number of nodes, which means that the maximum communication range of all clusters is the same.Therefore, we can obtain
where
is the connectivity probability that the cluster with
k nodes is connected with surface BS in multi-hop fashion, and it is worth noting that the number of nodes in the cluster as a relay is also
k.
To derive the lower bound of connectivity probability of
jth cluster with
k nodes
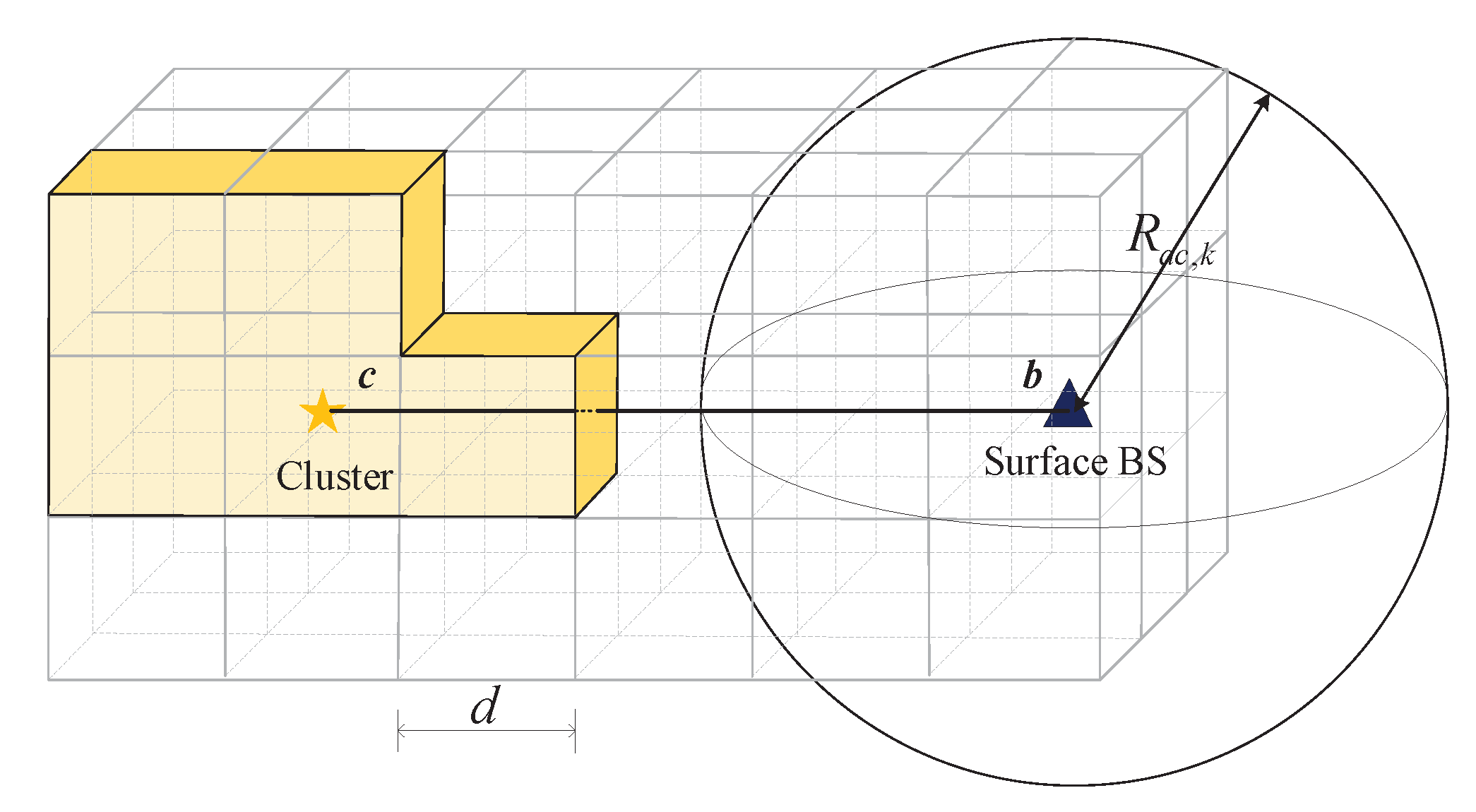
, we first map the networks on a discrete cube, as shown in
Figure 4 The straight line
cb connecting the
jth cluster and the surface BS is set as the horizontal line. The
jth cluster is located at the center of the cube and sides of the cube are parallel to
cb. The length of each side is
, which means that clusters in two adjacent cubes can be connected with each other. The clusters are distributed according to a homogeneous Poisson point process; as a result, they can be randomly divided into different cubes.
If the jth cluster can connect with the surface BS through multi-hop, there could be one or more paths that are distinguished by different relay choices. The set of these paths is denoted as , where denote all possible paths. When the cluster density is high, we use the maximum probability that a certain path exists as the lower bound of , i.e., . When the cluster density is low, we calculate the lower bound of the probability that there is at least one open path, i.e., 1 − . The lower bound is , where is the number of the existing paths and means that there is no paths between the jth cluster and surface BS.
To get the valid lower bound of connectivity probability
, the larger of the two bounds is selected as the lower bound of
. Therefore,
For the different paths that the
jth cluster can connect with surface BS, the shorter path can yield the higher connectivity probability. Therefore, the shortest path of the relay nodes that exist in the cubes for which a straight line
passes can yield the maximum existing probability. The number of cubes
W can be derived as
where
D is the distance between the
jth cluster and the surface BS and
means rounding
a to the nearest integer no less than
a.
When the cluster density is high, the lower bound of connectivity probability is
where
is the probability that there is no cluster in a cube.
When the cluster density is low, we need to calculate the probability
. When the
jth cluster cannot connect with the surface BS, there must be a hull
C that contains the
jth cluster and excludes the surface BS, as shown in
Figure 4. The cubes inside the hull contain at least one cluster, while those cubes outside the hull have no cluster. Hence,
can be evaluated by counting the number of hulls and the hulls must be passed by the straight line
.
Firstly, the number of faces of a hull is denoted as
n, the number of hulls that begin at a face and has
n faces is denoted as
. Obviously,
is less than the number of self-avoiding walks beginning at a face, i.e.,
. The total number of such closed hulls is denoted as
There are relays on one side of the hull and no relays on the other side. Hence, the probability that the
jth cluster cannot connect with the surface BS
is
Substituting Equations (
45) and (
47) into Equation (
43), we have
5.3. Upper Bound of Connectivity Probability in Multi-Hop Fashion
To get the upper bound of connectivity probability, we consider the probability in terms of hops. Therefore, the connectivity probability of the
jth cluster is
where
is probability that the
jth cluster is connected with surface BS directly,
is probability that the
jth cluster is connected with surface BS through one relay, and
is probability that the
jth cluster is connected with surface BS through two relays. From Equation (
49), we can derive that the more paths there are, the greater is the probability of connectivity. The connectivity probability increases with the number of interconnected nodes until there are no isolated nodes. The probability that there are no isolated clusters is the upper bound for the connectivity probability:
These clusters are distributed according to a homogeneous Poisson point process with density
,
where the probability of the cluster is isolated is
Substituting Equation (
52) into Equation (
51), we have


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









