A Calibration Procedure for Field and UAV-Based Uncooled Thermal Infrared Instruments

 ,
,  , , , , and
, , , , and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Thermal Instruments
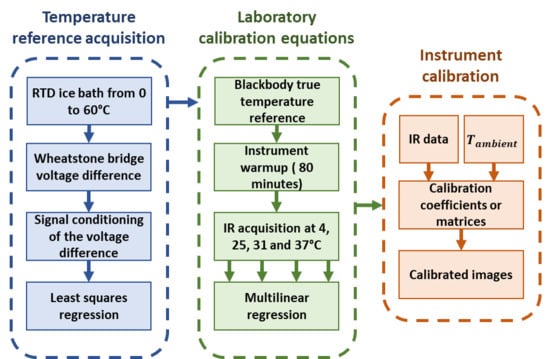
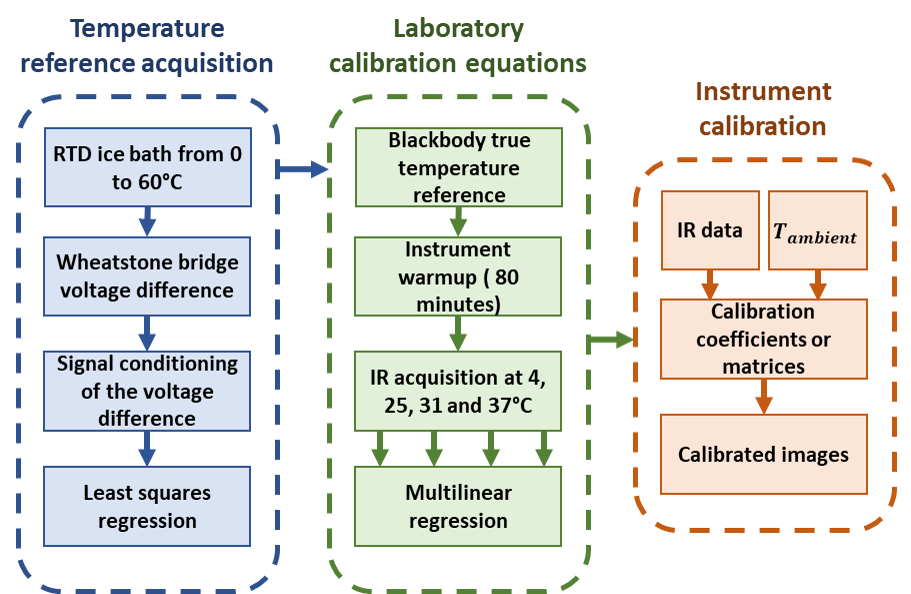
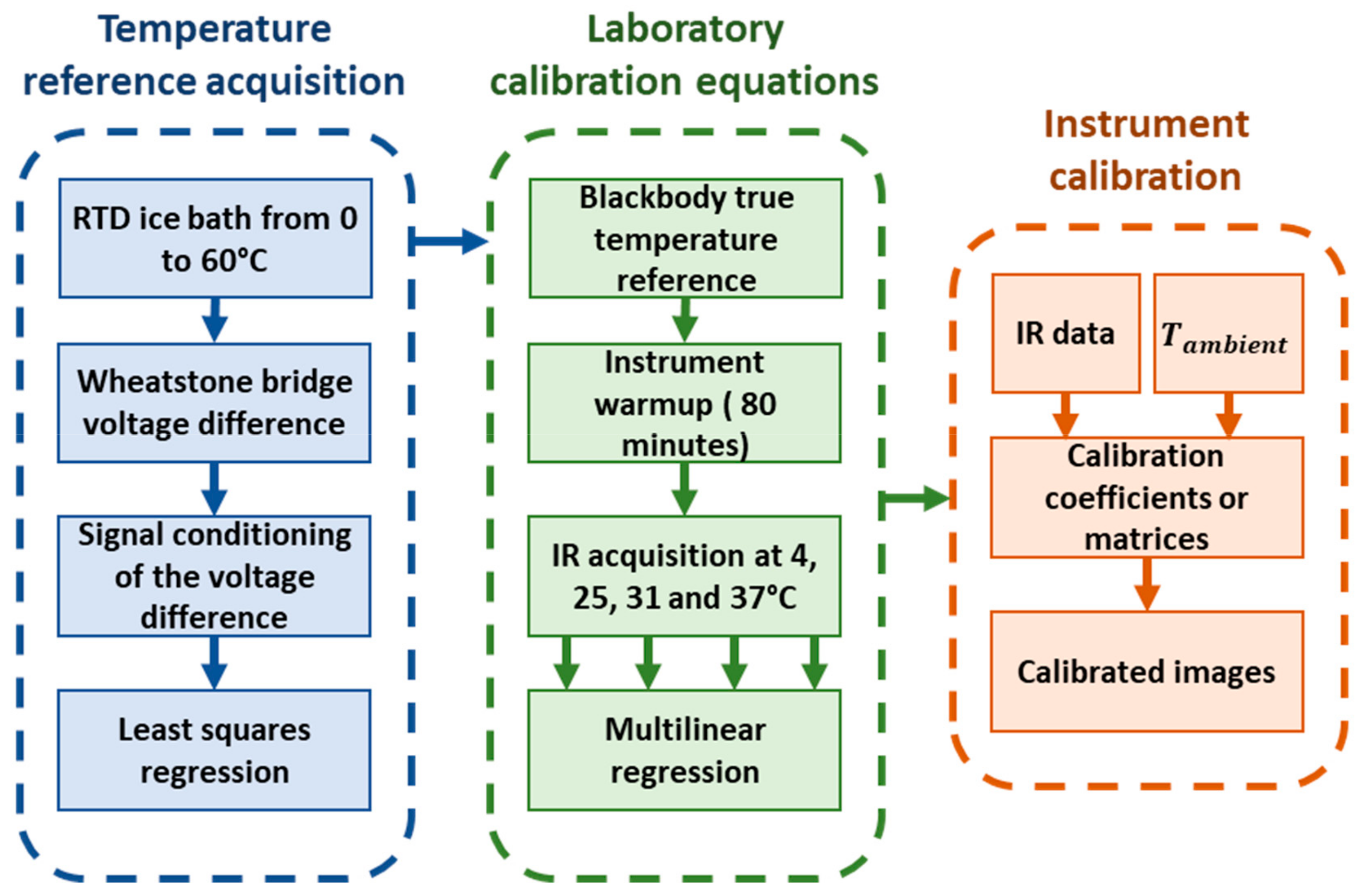
2.2. Calibration Workflow
2.3. Black Body Characterization
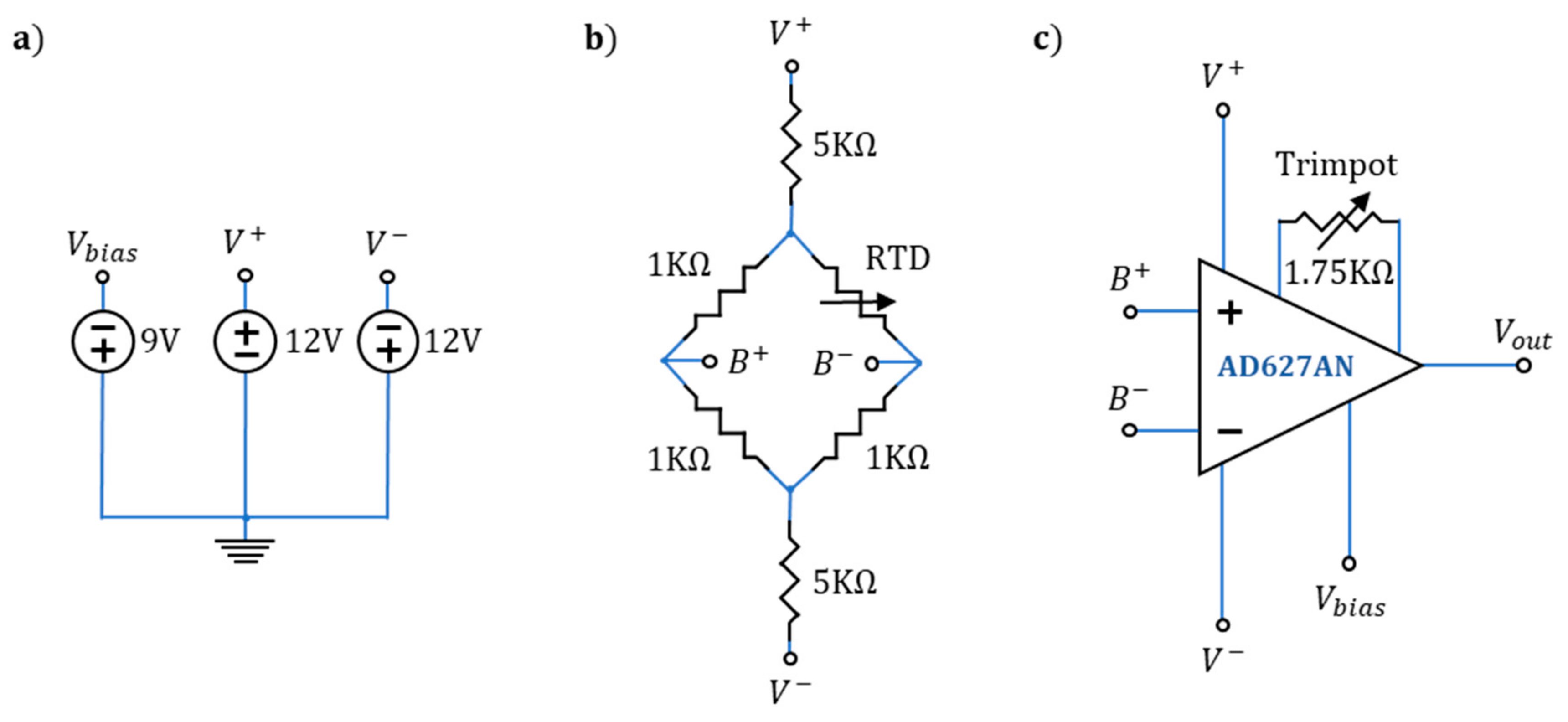
2.4. Laboratory Setup
2.5. Derivation of Calibration Equations
2.6. Calibration Evaluation
3. Results
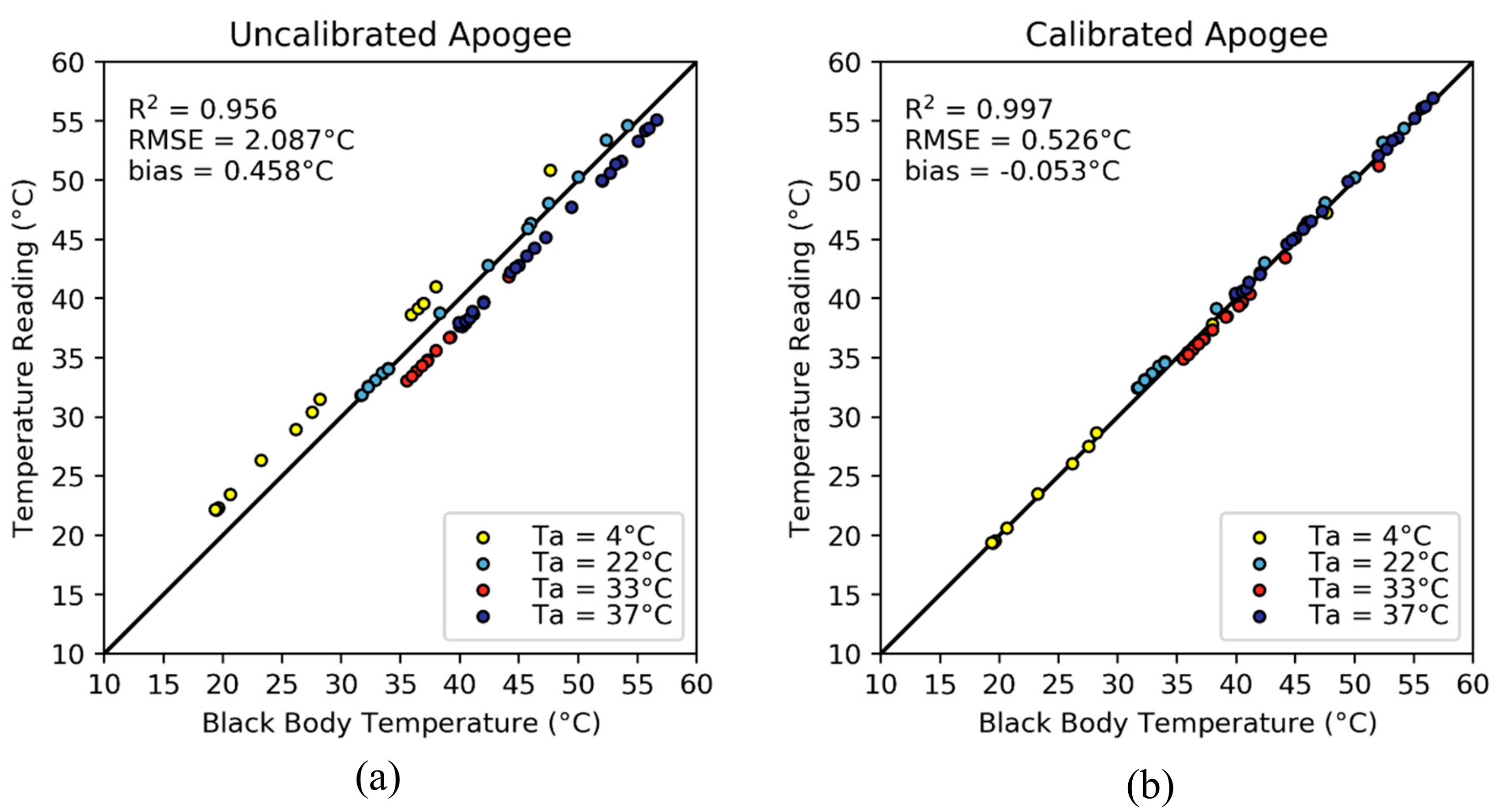
3.1. Apogee Calibration
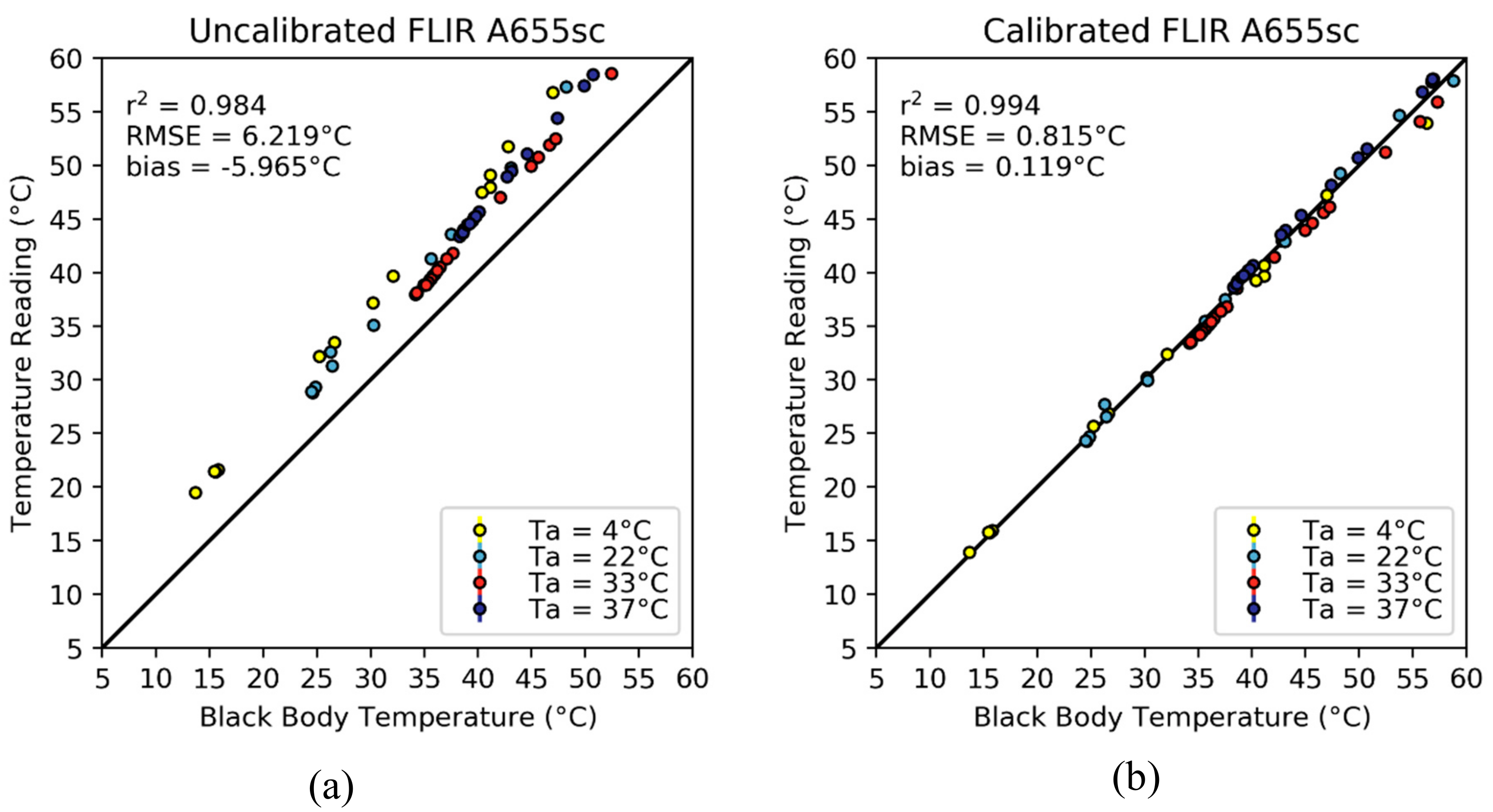
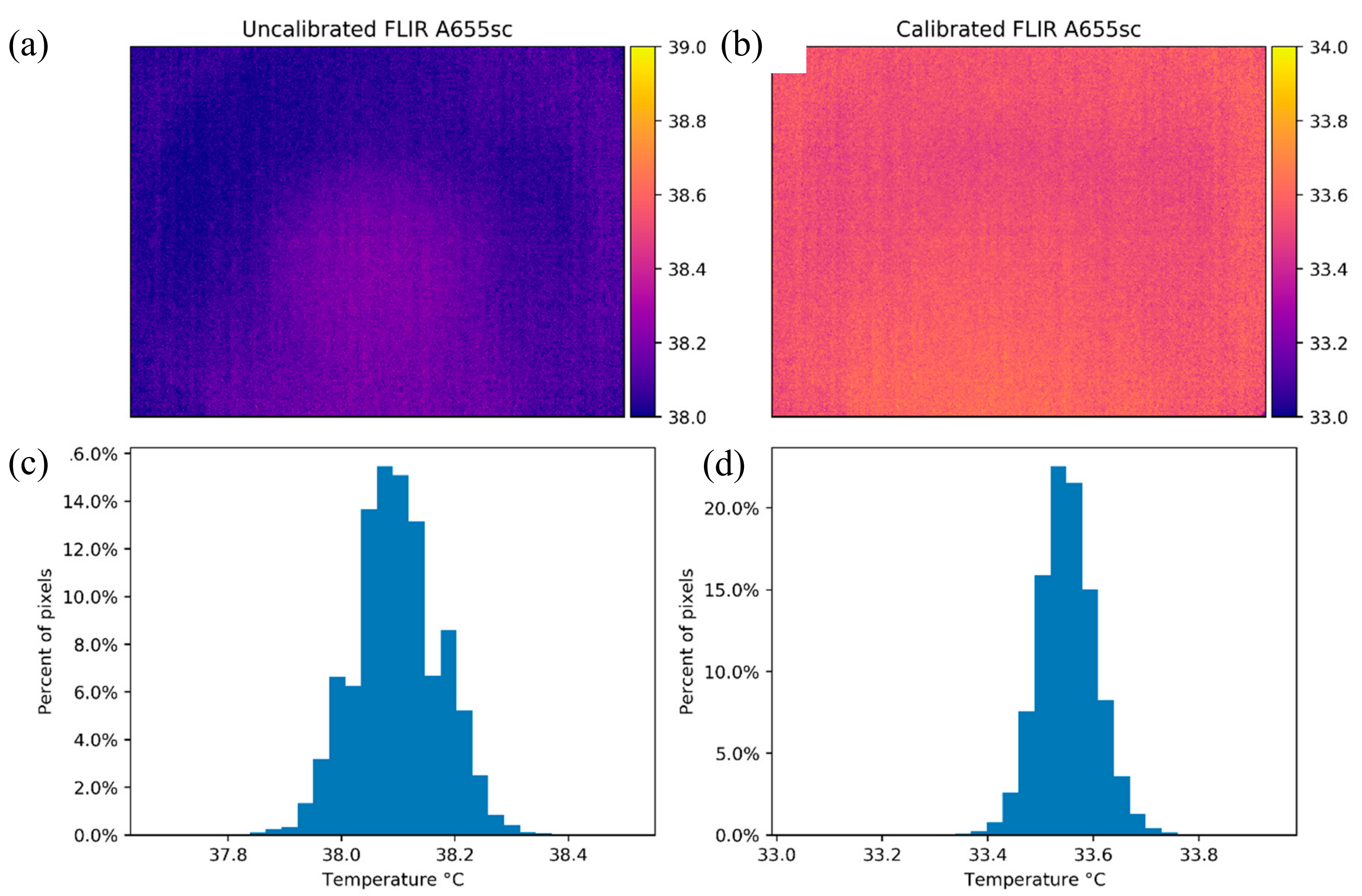
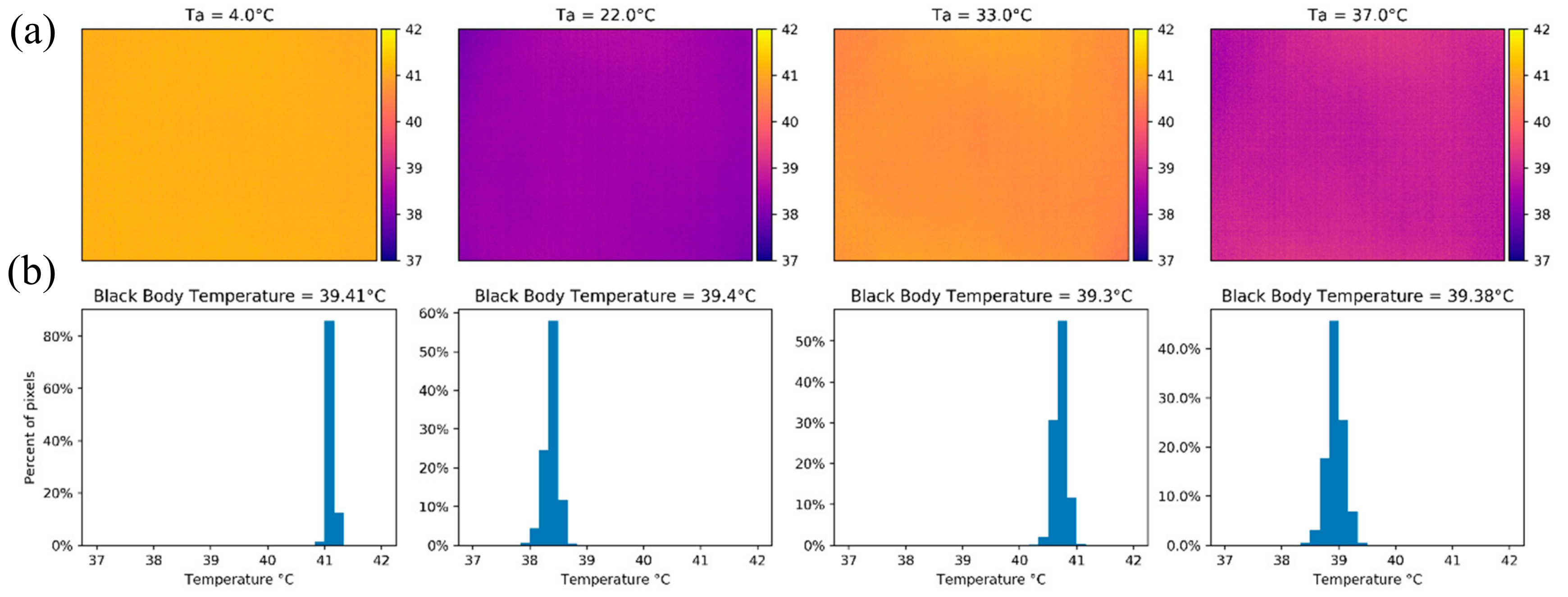
3.2. FLIR A655sc Calibration
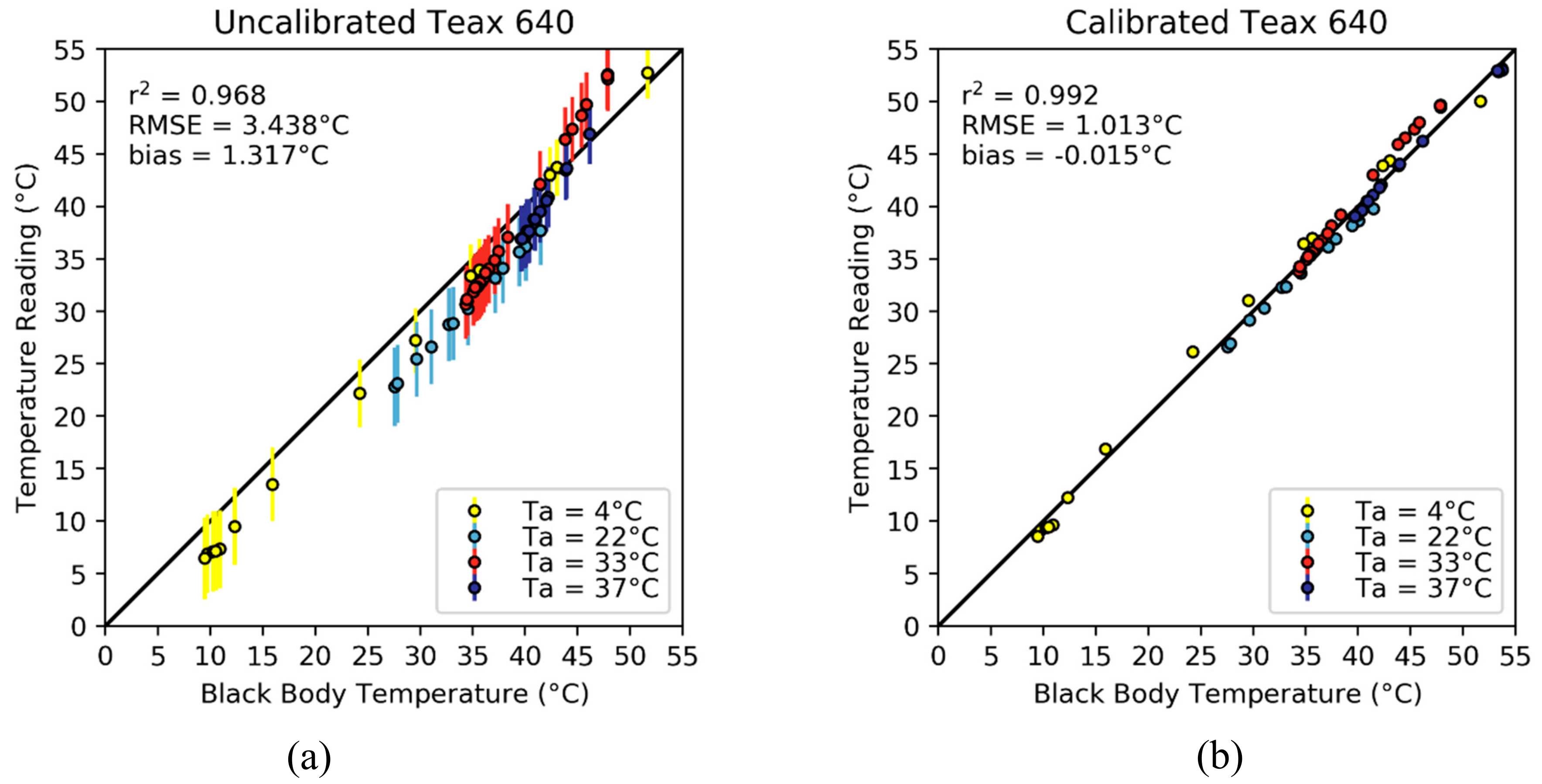
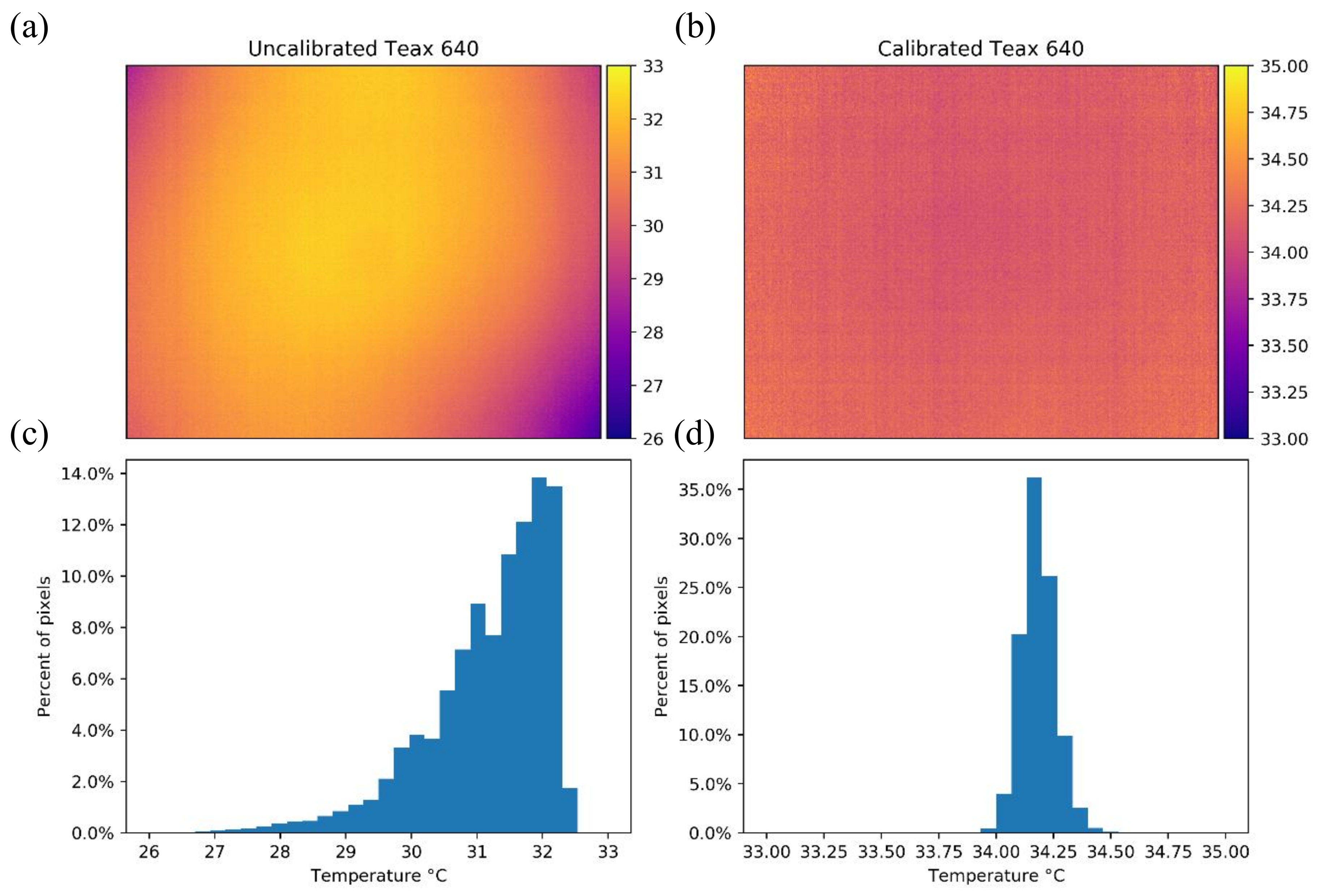
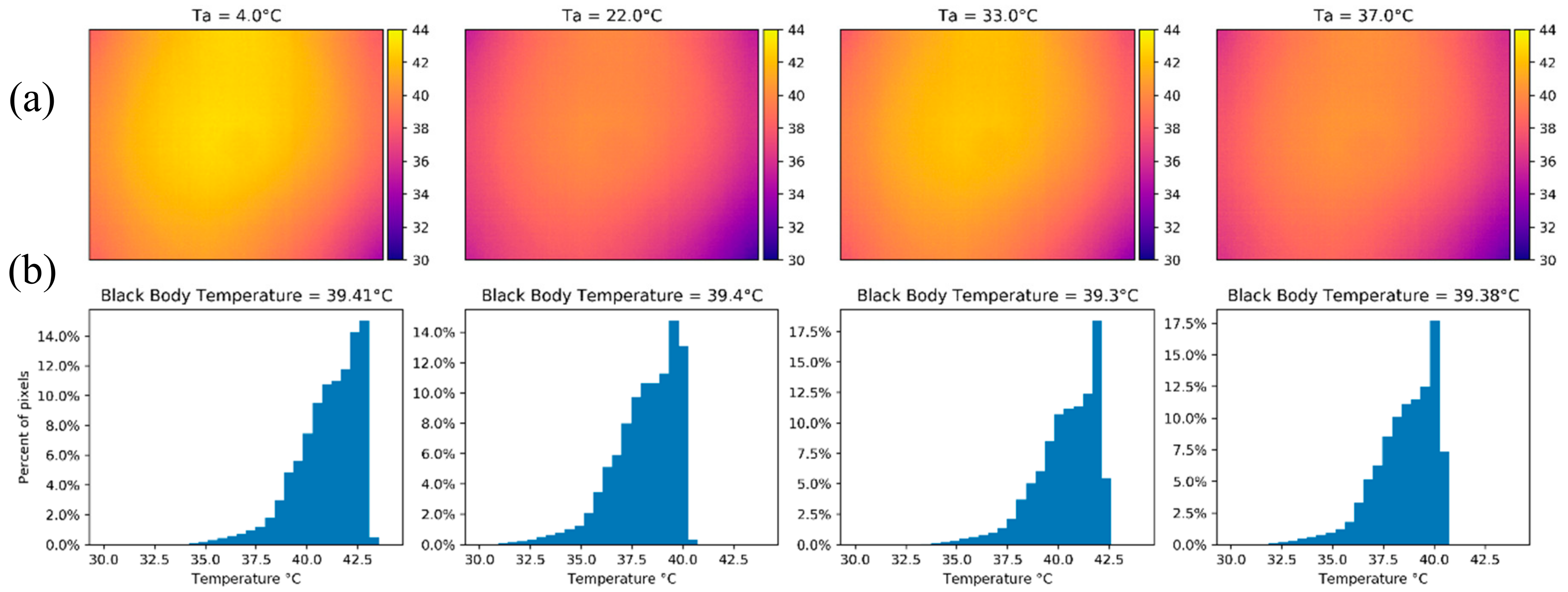
3.3. TeAx 640 Calibration
3.4. Impact of the and Calibration Coefficients on the TeAx 640 Vignetting
4. Discussion
4.1. Instrumentation Requirements of the Calibration Process
4.2. Ambient Temperature and Vignette Effects
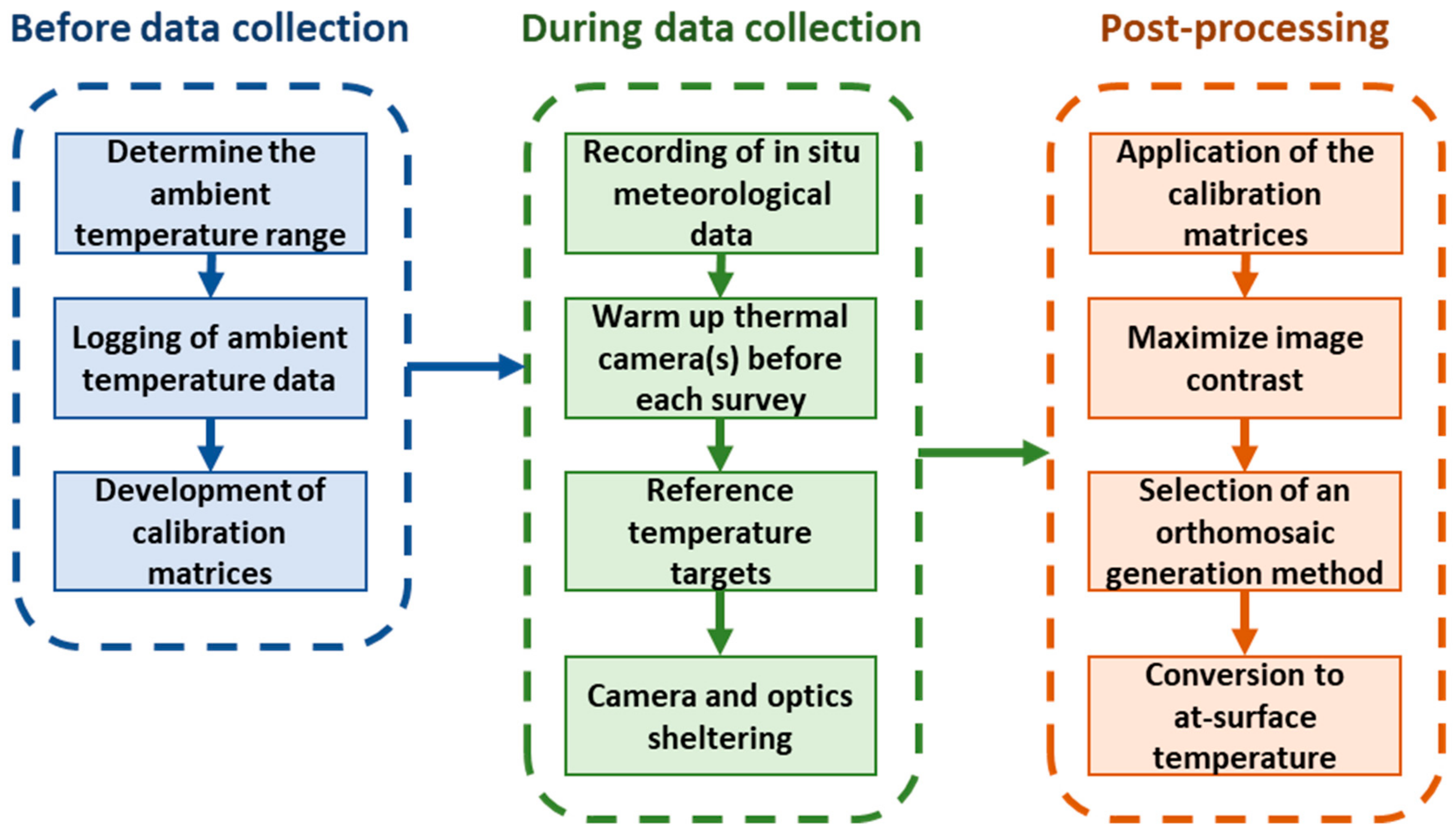
4.3. Considerations for Field Based Applications
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gade, R.; Moeslund, T.B. Thermal cameras and applications: A survey. Mach. Vision Appl. 2013, 25, 245–262. [Google Scholar] [CrossRef]
- Rogalski, A. Progress in focal plane array technologies. Prog. Quantum Electron. 2012, 36, 342–473. [Google Scholar] [CrossRef]
- Rogalski, A.; Martyniuk, P.; Kopytko, M. Challenges of small-pixel infrared detectors: A review. Rep. Prog. Phys. 2016, 79, 046501-046501. [Google Scholar] [CrossRef] [PubMed]
- Usamentiaga, R.; Venegas, P.; Guerediaga, J.; Vega, L.; Molleda, J.; Bulnes, F.G. Infrared thermography for temperature measurement and non-destructive testing. Sensors 2014, 14, 12305–12348. [Google Scholar] [CrossRef] [PubMed]
- Hui, Z.; Fuzhen, H. An intelligent fault diagnosis method for electrical equipment using infrared images. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 6372–6376. [Google Scholar]
- Marino, B.M.; Muñoz, N.; Thomas, L.P. Estimation of the surface thermal resistances and heat loss by conduction using thermography. Appl. Therm. Eng. 2017, 114, 1213–1221. [Google Scholar] [CrossRef]
- Jones, B.F. A reappraisal of the use of infrared thermal image analysis in medicine. IEEE Trans. Med. Imaging 1998, 17, 1019–1027. [Google Scholar] [CrossRef] [PubMed]
- Prata, A.J.; Caselles, V.; Coll, C.; Sobrino, J.A.; Ottle, C. Thermal remote sensing of land surface temperature from satellites: Current status and future prospects. Remote Sens. Rev. 1995, 12, 175–224. [Google Scholar] [CrossRef]
- Yang, J.; Jin, S.; Xiao, X.; Jin, C.; Xia, J.; Li, X.; Wang, S. Local climate zone ventilation and urban land surface temperatures: Towards a performance-based and wind-sensitive planning proposal in megacities. Sustainable Cities Soc. 2019, 47, 101487. [Google Scholar] [CrossRef]
- Deilami, K.; Kamruzzaman, M.; Liu, Y. Urban heat island effect: A systematic review of spatio-temporal factors, data, methods, and mitigation measures. Int. J. Appl. Earth Obs. Geoinf. 2018, 67, 30–42. [Google Scholar] [CrossRef]
- Zhou, D.; Xiao, J.; Bonafoni, S.; Berger, C.; Deilami, K.; Zhou, Y.; Frolking, S.; Yao, R.; Qiao, Z.; Sobrino, J. Satellite remote sensing of surface urban heat islands: Progress, challenges, and perspectives. Remote Sens. 2019, 11, 48. [Google Scholar] [CrossRef]
- Maffei, C.; Alfieri, S.; Menenti, M. Relating spatiotemporal patterns of forest fires burned area and duration to diurnal land surface temperature anomalies. Remote Sens. 2018, 10, 1777. [Google Scholar] [CrossRef]
- Quintano, C.; Fernandez-Manso, A.; Roberts, D.A. Burn severity mapping from landsat mesma fraction images and land surface temperature. Remote Sens. Environ. 2017, 190, 83–95. [Google Scholar] [CrossRef]
- Anderson, M.C.; Kustas, W.P.; Alfieri, J.G.; Gao, F.; Hain, C.; Prueger, J.H.; Evett, S.; Colaizzi, P.; Howell, T.; Chávez, J.L. Mapping daily evapotranspiration at landsat spatial scales during the bearex’08 field campaign. Adv. Water Resour. 2012, 50, 162–177. [Google Scholar] [CrossRef]
- Cammalleri, C.; Anderson, M.C.; Gao, F.; Hain, C.R.; Kustas, W.P. A data fusion approach for mapping daily evapotranspiration at field scale. Water Resour. Res. 2013, 49, 4672–4686. [Google Scholar] [CrossRef]
- Colaizzi, P.D.; Kustas, W.P.; Anderson, M.C.; Agam, N.; Tolk, J.A.; Evett, S.R.; Howell, T.A.; Gowda, P.H.; O’Shaughnessy, S.A. Two-source energy balance model estimates of evapotranspiration using component and composite surface temperatures. Adv. Water Resour. 2012, 50, 134–151. [Google Scholar] [CrossRef]
- Kustas, W.; Anderson, M. Advances in thermal infrared remote sensing for land surface modeling. Agric. For. Meteorol. 2009, 149, 2071–2081. [Google Scholar] [CrossRef]
- Anderson, M.C.; Zolin, C.A.; Sentelhas, P.C.; Hain, C.R.; Semmens, K.; Yilmaz, M.T.; Gao, F.; Otkin, J.A.; Tetrault, R. The evaporative stress index as an indicator of agricultural drought in brazil: An assessment based on crop yield impacts. Remote Sens. Environ. 2016, 174, 82–99. [Google Scholar] [CrossRef]
- Egea, G.; Padilla-Díaz, C.M.; Martinez-Guanter, J.; Fernández, J.E.; Pérez-Ruiz, M. Assessing a crop water stress index derived from aerial thermal imaging and infrared thermometry in super-high density olive orchards. Agric. Water Manage. 2017, 187, 210–221. [Google Scholar] [CrossRef]
- Hulley, G.; Hook, S.; Fisher, J.; Lee, C. Ecostress, a nasa earth-ventures instrument for studying links between the water cycle and plant health over the diurnal cycle. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS)., Fort Worth, TX, USA, 23–28 July 2017; pp. 5494–5496. [Google Scholar]
- Yao, Y.; Liang, S.; Cao, B.; Liu, S.; Yu, G.; Jia, K.; Zhang, X.; Zhang, Y.; Chen, J.; Fisher, J.B. Satellite detection of water stress effects on terrestrial latent heat flux with modis shortwave infrared reflectance data. J. Geophys. Res. Atmos. 2018, 123, 11–410. [Google Scholar] [CrossRef]
- Malbéteau, Y.; Parkes, S.; Aragon, B.; Rosas, J.; McCabe, M. Capturing the diurnal cycle of land surface temperature using an unmanned aerial vehicle. Remote Sens. 2018, 10, 1407. [Google Scholar] [CrossRef]
- Hoffmann, H.; Nieto, H.; Jensen, R.; Guzinski, R.; Zarco-Tejada, P.; Friborg, T. Estimating evaporation with thermal uav data and two-source energy balance models. Hydrol. Earth Syst. Sci. 2016, 20, 697–713. [Google Scholar] [CrossRef]
- Kelly, J.; Kljun, N.; Olsson, P.-O.; Mihai, L.; Liljeblad, B.; Weslien, P.; Klemedtsson, L.; Eklundh, L. Challenges and best practices for deriving temperature data from an uncalibrated uav thermal infrared camera. Remote Sens. 2019, 11, 567. [Google Scholar] [CrossRef]
- Quater, P.B.; Grimaccia, F.; Leva, S.; Mussetta, M.; Aghaei, M. Light unmanned aerial vehicles (uavs) for cooperative inspection of pv plants. IEEE J. Photovoltaics 2014, 4, 1107–1113. [Google Scholar] [CrossRef]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P. Quantitative remote sensing at ultra-high resolution with uav spectroscopy: A review of sensor technology, measurement procedures, and data correction workflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef]
- Candiago, S.; Remondino, F.; De Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating multispectral images and vegetation indices for precision farming applications from uav images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef]
- Smigaj, M.; Gaulton, R.; Suarez, J.; Barr, S. Use of miniature thermal cameras for detection of physiological stress in conifers. Remote Sens. 2017, 9, 957. [Google Scholar] [CrossRef]
- Rud, R.; Cohen, Y.; Alchanatis, V.; Levi, A.; Brikman, R.; Shenderey, C.; Heuer, B.; Markovitch, T.; Dar, Z.; Rosen, C.; et al. Crop water stress index derived from multi-year ground and aerial thermal images as an indicator of potato water status. Precis. Agric. 2014, 15, 273–289. [Google Scholar] [CrossRef]
- Baratchi, M.; Meratnia, N.; Havinga, P.J.; Skidmore, A.K.; Toxopeus, B.A. Sensing solutions for collecting spatio-temporal data for wildlife monitoring applications: A review. Sensors 2013, 13, 6054–6088. [Google Scholar] [CrossRef] [PubMed]
- Lhoest, S.; Linchant, J.; Quevauvillers, S.; Vermeulen, C.; Lejeune, P. How many hippos (homhip): Algorithm for automatic counts of animals with infra-red thermal imagery from uav. ISPRS J. Photogramm. Remote Sens. 2015, XL-3/W3, 355–362. [Google Scholar] [CrossRef]
- Mesas-Carrascosa, F.-J.; Pérez-Porras, F.; Meroño de Larriva, J.; Mena Frau, C.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P.; García-Ferrer, A. Drift correction of lightweight microbolometer thermal sensors on-board unmanned aerial vehicles. Remote Sens. 2018, 10, 615. [Google Scholar] [CrossRef]
- Torres-Rua, A. Vicarious calibration of suas microbolometer temperature imagery for estimation of radiometric land surface temperature. Sensors 2017, 17, 1499. [Google Scholar] [CrossRef] [PubMed]
- Ribeiro-Gomes, K.; Hernandez-Lopez, D.; Ortega, J.F.; Ballesteros, R.; Poblete, T.; Moreno, M.A. Uncooled thermal camera calibration and optimization of the photogrammetry process for uav applications in agriculture. Sensors 2017, 17, 2173. [Google Scholar] [CrossRef] [PubMed]
- Peeters, J.; Louarroudi, E.; De Greef, D.; Vanlanduit, S.; Dirckx, J.J.J.; Steenackers, G. Time calibration of thermal rolling shutter infrared cameras. Infrared Phys. Technol. 2017, 80, 145–152. [Google Scholar] [CrossRef]
- Berni, J.; Zarco-Tejada, P.J.; Suarez, L.; Fereres, E. Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef]
- Nugent, P.W.; Shaw, J.A.; Pust, N.J. Correcting for focal-plane-array temperature dependence in microbolometer infrared cameras lacking thermal stabilization. Opt. Eng. 2013, 52(6), 061304. [Google Scholar] [CrossRef]
- Gerhards, M.; Schlerf, M.; Mallick, K.; Udelhoven, T. Challenges and future perspectives of multi-/hyperspectral thermal infrared remote sensing for crop water-stress detection: A review. Remote Sens. 2019, 11, 1240. [Google Scholar] [CrossRef]
- Pestana, S.; Chickadel, C.C.; Harpold, A.; Kostadinov, T.S.; Pai, H.; Tyler, S.; Webster, C.; Lundquist, J.D. Bias correction of airborne thermal infrared observations over forests using melting snow. Water Resour. Res. 2019, 55, 11331–11343. [Google Scholar] [CrossRef]
- Zhao, T.; Niu, H.; Anderson, A.; Chen, Y.; Viers, J. A detailed study on accuracy of uncooled thermal cameras by exploring the data collection workflow. In Proceedings of the SPIE Commercial + Scientific Sensing and Imaging, Orlando, FL, USA, 15–19 April 2018. [Google Scholar]
- Dhar, N.K.; Dutta, A.K.; Krupiński, M.; Bieszczad, G.; Gogler, S.; Madura, H. Non-uniformity correction with temperature influence compensation in microbolometer detector. In Proceedings of the SPIE Sensing Technology + Applications, Baltimore, MD, USA, 20–24 April 2015. [Google Scholar]
- Budzier, H.; Gerlach, G. Calibration of uncooled thermal infrared cameras. J. Sens. Syst. 2015, 4, 187–197. [Google Scholar] [CrossRef]
- Gonzalez-Chavez, O.; Cardenas-Garcia, D.; Karaman, S.; Lizarraga, M.; Salas, J. Radiometric calibration of digital counts of infrared thermal cameras. IEEE Trans. Instrum. Meas. 2019, 68, 4387–4399. [Google Scholar] [CrossRef]
- Papini, S.; Yafin, P.; Klapp, I.; Sochen, N. Joint estimation of unknown radiometric data, gain, and offset from thermal images. Appl. Opt. 2018, 57, 10390–10401. [Google Scholar] [CrossRef] [PubMed]
- Deery, D.M.; Rebetzke, G.J.; Jimenez-Berni, J.A.; James, R.A.; Condon, A.G.; Bovill, W.D.; Hutchinson, P.; Scarrow, J.; Davy, R.; Furbank, R.T. Methodology for high-throughput field phenotyping of canopy temperature using airborne thermography. Front. Plant Sci. 2016, 7, 1808. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Gao, H.; Zhou, J.; Cousins, A.; Pumphrey, M.O.; Sankaran, S. 3d robotic system development for high-throughput crop phenotyping. IFAC-PapersOnLine 2016, 49, 242–247. [Google Scholar] [CrossRef]
- Mahan, J.R.; Yeater, K.M. Agricultural applications of a low-cost infrared thermometer. Comput. Electron. Agric. 2008, 64, 262–267. [Google Scholar] [CrossRef]
- Rosas, J.; Houborg, R.; McCabe, M.F. Sensitivity of landsat 8 surface temperature estimates to atmospheric profile data: A study using modtran in dryland irrigated systems. Remote Sens. 2017, 9, 988. [Google Scholar] [CrossRef]
- Pérez-Díaz, C.L.; Lakhankar, T.; Romanov, P.; Muñoz, J.; Khanbilvardi, R.; Yu, Y. Evaluation of modis land surface temperature with in-situ snow surface temperature from crest-safe. Int. J. Remote Sens. 2017, 38, 4722–4740. [Google Scholar] [CrossRef]
- Apogee. Owner’s manual infrared radiometer. Available online: https://www.apogeeinstruments.com/content/SI-100-manual.pdf (accessed on 15 April 2020).
- FLIR. High-resolution scientific grade lwir camera flir a655sc. Available online: https://www.flir.com/products/a655sc/ (accessed on 15 April 2020).
- FLIR. Longwave infrared thermal camera core tau 2. Available online: https://www.flir.com/products/tau-2/ (accessed on 15 April 2020).
- Teax. User manual for thermalcapture 2.0. Available online: https://thermalcapture.com/wp-content/uploads/2018/01/ThermalCapture-2-0-Users-Manual-TeAx.pdf (accessed on 15 April 2020).
- FLIR. Duo pro r user guide. Available online: https://www.flir.com/globalassets/imported-assets/document/duo-pro-r-user-guide-v1.0.pdf (accessed on 15 April 2020).
- LabJack. U12 datasheet. Available online: https://labjack.com/support/datasheets/u12 (accessed on 15 April 2020).
- FLIR. 12v 4” blackbody for gain cal & supplemental ffc. Available online: https://www.flir.com/products/285-0029-02_12-v-blackbody-for-gain-cal/ (accessed on 15 April 2020).
- Grgić, G.; Pušnik, I. Analysis of thermal imagers. Int. J. Thermophys. 2011, 32, 237–247. [Google Scholar] [CrossRef]
- Apogee. Field of view. Available online: https://www.apogeeinstruments.com/field-of-view/ (accessed on 15 April 2020).
- Jung, Y.; Hu, J. A k-fold averaging cross-validation procedure. J. Nonparametr. Stat. 2015, 27, 167–179. [Google Scholar] [CrossRef] [PubMed]
- Kalma, J.D.; Alksnis, H.; Laughlin, G.P. Calibration of small infra-red surface temperature transducers. Agric. For. Meteorol. 1988, 43, 83–98. [Google Scholar] [CrossRef]
- Sun, L.; Chang, B.; Zhang, J.; Qiu, Y.; Qian, Y.; Tian, S. Analysis and measurement of thermal-electrical performance of microbolometer detector. In Proceedings of the SPIE Optoelectronic Materials and Devices II, Wuhan, China, 19 November 2007. [Google Scholar]
- Karunasiri, G.; Ramakrishna, M.V.S.; Neuzil, P. Effect of operating temperature on electrical and thermal properties of microbolometer infrared sensors. Sens. Mater. 2003, 15, 147–154. [Google Scholar]
- Wolf, A.; Pezoa, J.E.; Figueroa, M. Modeling and compensating temperature-dependent non-uniformity noise in ir microbolometer cameras. Sensors 2016, 16, 1121. [Google Scholar] [CrossRef] [PubMed]
- Aubrecht, D.M.; Helliker, B.R.; Goulden, M.L.; Roberts, D.A.; Still, C.J.; Richardson, A.D. Continuous, long-term, high-frequency thermal imaging of vegetation: Uncertainties and recommended best practices. Agric. For. Meteorol. 2016, 228–229, 315–326. [Google Scholar] [CrossRef]
- Hammerle, A.; Meier, F.; Heinl, M.; Egger, A.; Leitinger, G. Implications of atmospheric conditions for analysis of surface temperature variability derived from landscape-scale thermography. Int. J. Biometeorol. 2017, 61, 575–588. [Google Scholar] [CrossRef] [PubMed]
- Meier, F.; Scherer, D.; Richters, J.; Christen, A. Atmospheric correction of thermal-infrared imagery of the 3-d urban environment acquired in oblique viewing geometry. Atmos. Meas. Tech. 2011, 4, 909–922. [Google Scholar] [CrossRef]
- Zheng, X.; Li, Z.-L.; Zhang, X.; Shang, G. Quantification of the adjacency effect on measurements in the thermal infrared region. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9674–9687. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Estimating evapotranspiration and drought stress with ground-based thermal remote sensing in agriculture: A review. J. Exp. Bot. 2012, 63, 4671–4712. [Google Scholar] [CrossRef] [PubMed]
- Maes, W.; Huete, A.; Steppe, K. Optimizing the processing of uav-based thermal imagery. Remote Sens. 2017, 9, 476. [Google Scholar] [CrossRef]
- Park, S.; Ryu, D.; Fuentes, S.; Chung, H.; Hernández-Montes, E.; O’Connell, M. Adaptive estimation of crop water stress in nectarine and peach orchards using high-resolution imagery from an unmanned aerial vehicle (uav). Remote Sens. 2017, 9, 828. [Google Scholar] [CrossRef]
- Jones, H.G.; Stoll, M.; Santos, T.; de Sousa, C.; Chaves, M.M.; Grant, O.M. Use of infrared thermography for monitoring stomatal closure in the field: Application to grapevine. J. Exp. Bot. 2002, 53, 2249–2260. [Google Scholar] [CrossRef] [PubMed]
- Tu, L.; Qin, Z.; Yang, L.; Wang, F.; Geng, J.; Zhao, S. Identifying the lambertian property of ground surfaces in the thermal infrared region via field experiments. Remote Sens 2017, 9, 481. [Google Scholar] [CrossRef]
- Wan, Z.; Zhang, Y.; Ma, X.; King, M.D.; Myers, J.S.; Li, X. Vicarious calibration of the moderate-resolution imaging spectroradiometer airborne simulator thermal-infrared channels. Appl. Opt. 1999, 38, 6294–6306. [Google Scholar] [CrossRef] [PubMed]
- Karpouzli, E.; Malthus, T. The empirical line method for the atmospheric correction of ikonos imagery. Int. J. Remote Sens. 2010, 24, 1143–1150. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Malenovský, Z.; King, D.; Robinson, S. Spatial co-registration of ultra-high resolution visible, multispectral and thermal images acquired with a micro-uav over antarctic moss beds. Remote Sens. 2014, 6, 4003–4024. [Google Scholar] [CrossRef]
- Chen, C. Determining the leaf emissivity of three crops by infrared thermometry. Sensors 2015, 15, 11387–11401. [Google Scholar] [CrossRef] [PubMed]
- Adkins, K.A.; Sescu, A. Observations of relative humidity in the near-wake of a wind turbine using an instrumented unmanned aerial system. Int. J. Green Energy 2017, 14, 845–860. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment | Cost (USD) |
|---|---|
| Instrumentation amplifier | <10 |
| Breadboard (or a printed circuit board) | <10 |
| Resistance Temperature Detector (RTD) | <10 |
| Trim potentiometer | <10 |
| 1% resistors (× 6 per RTD) | <10 |
| Laboratory power supply (triple output) | ~400 |
| Stirring hotplate (for the RTD calibration process) | ~70 |
| Labjack U12 data acquisition card | ~200 |
| Black body | ~2000–4000 (depending on model) |
| Wires and solder material | <10 |
| Soldering iron | ~70 |
| Environmental chamber | >5000 (depending on size) |
| Statistic | ||||||||
|---|---|---|---|---|---|---|---|---|
| Ambient Temperature (°C) | Ambient Temperature (°C) | |||||||
| 4 | 22 | 33 | 37 | 4 | 22 | 33 | 37 | |
| (°C) | 0.049 | 0.119 | 0.104 | 0.151 | 1.56 | 1.60 | 1.54 | 1.51 |
| IQR (°C) | 0.030 | 0.074 | 0.076 | 0.074 | 0.77 | 0.79 | 0.81 | 0.72 |
| Mean (°C) | 41.11 | 38.38 | 40.71 | 38.94 | 41.03 | 38.13 | 40.36 | 38.56 |
| Median (°C) | 41.11 | 38.38 | 40.71 | 38.94 | 41.31 | 38.41 | 40.37 | 38.83 |
| Bias (°C) | 1.70 | –1.02 | 1.41 | –0.44 | 1.62 | –1.27 | 1.06 | –0.82 |
| TMin (°C) | 40.76 | 37.60 | 39.99 | 38.10 | 33.57 | 30.60 | 32.81 | 31.00 |
| TMax (°C) | 41.43 | 38.92 | 41.19 | 39.62 | 43.44 | 40.62 | 42.77 | 41.02 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aragon, B.; Johansen, K.; Parkes, S.; Malbeteau, Y.; Al-Mashharawi, S.; Al-Amoudi, T.; Andrade, C.F.; Turner, D.; Lucieer, A.; McCabe, M.F. A Calibration Procedure for Field and UAV-Based Uncooled Thermal Infrared Instruments. Sensors 2020, 20, 3316. https://doi.org/10.3390/s20113316
Aragon B, Johansen K, Parkes S, Malbeteau Y, Al-Mashharawi S, Al-Amoudi T, Andrade CF, Turner D, Lucieer A, McCabe MF. A Calibration Procedure for Field and UAV-Based Uncooled Thermal Infrared Instruments. Sensors. 2020; 20(11):3316. https://doi.org/10.3390/s20113316
Chicago/Turabian StyleAragon, Bruno, Kasper Johansen, Stephen Parkes, Yoann Malbeteau, Samir Al-Mashharawi, Talal Al-Amoudi, Cristhian F. Andrade, Darren Turner, Arko Lucieer, and Matthew F. McCabe. 2020. "A Calibration Procedure for Field and UAV-Based Uncooled Thermal Infrared Instruments" Sensors 20, no. 11: 3316. https://doi.org/10.3390/s20113316
APA StyleAragon, B., Johansen, K., Parkes, S., Malbeteau, Y., Al-Mashharawi, S., Al-Amoudi, T., Andrade, C. F., Turner, D., Lucieer, A., & McCabe, M. F. (2020). A Calibration Procedure for Field and UAV-Based Uncooled Thermal Infrared Instruments. Sensors, 20(11), 3316. https://doi.org/10.3390/s20113316