A Multi-Module Fixed Inclinometer for Continuous Monitoring of Landslides: Design, Development, and Laboratory Testing



Abstract
1. Introduction
2. Single Module Prototype
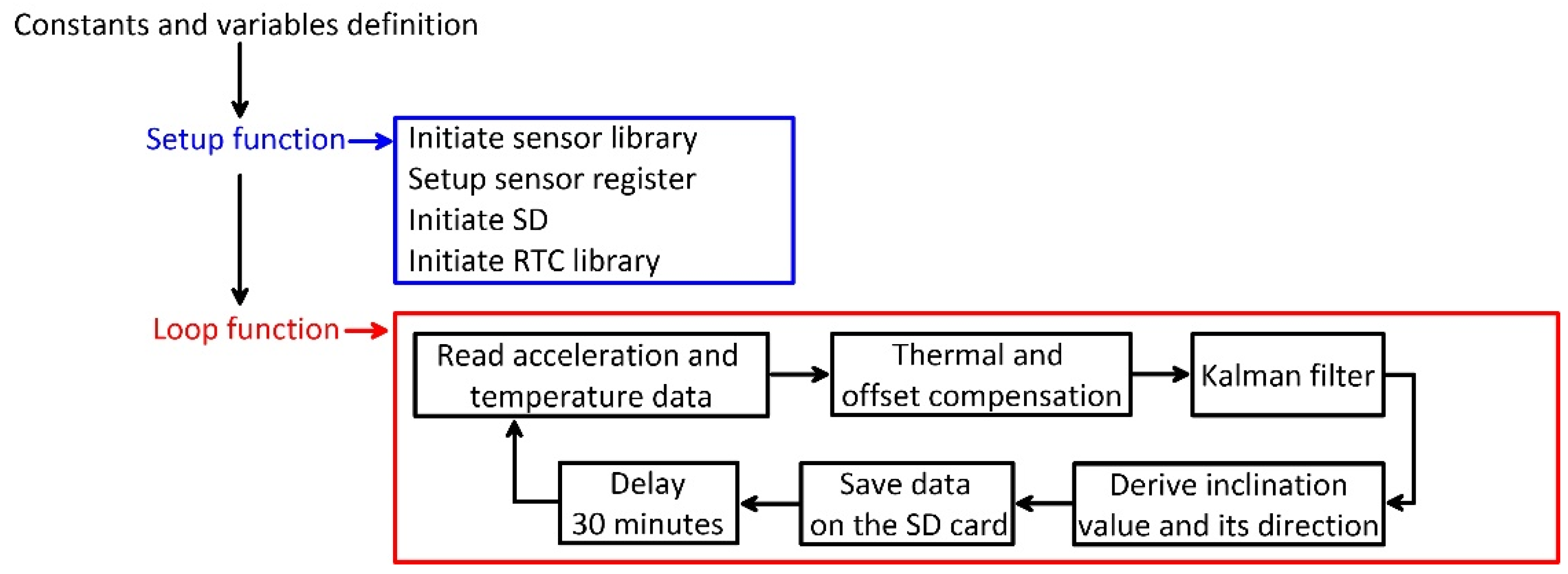
2.1. Hardware and Software
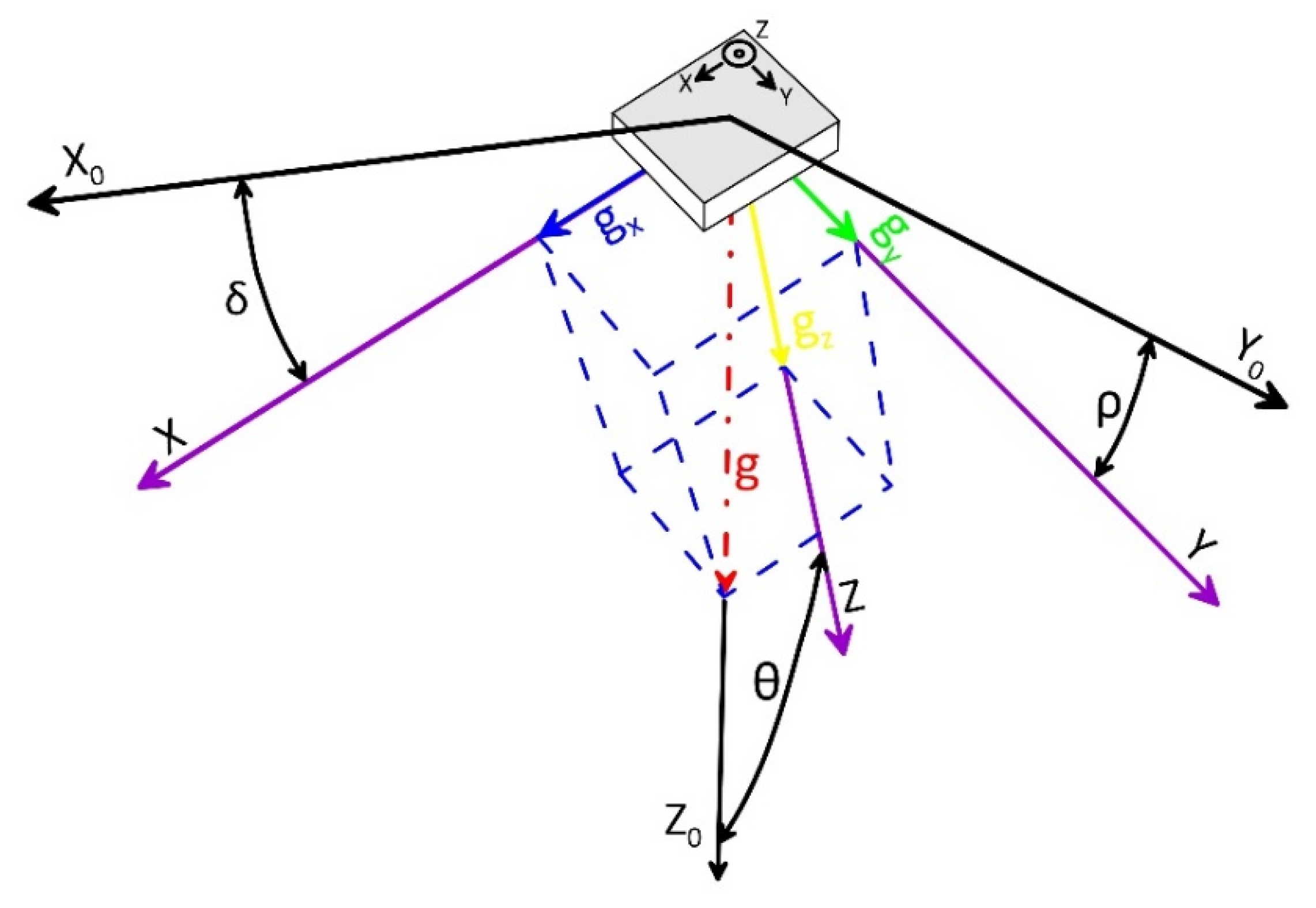
2.2. Sensor Optimization and Inclination Estimation
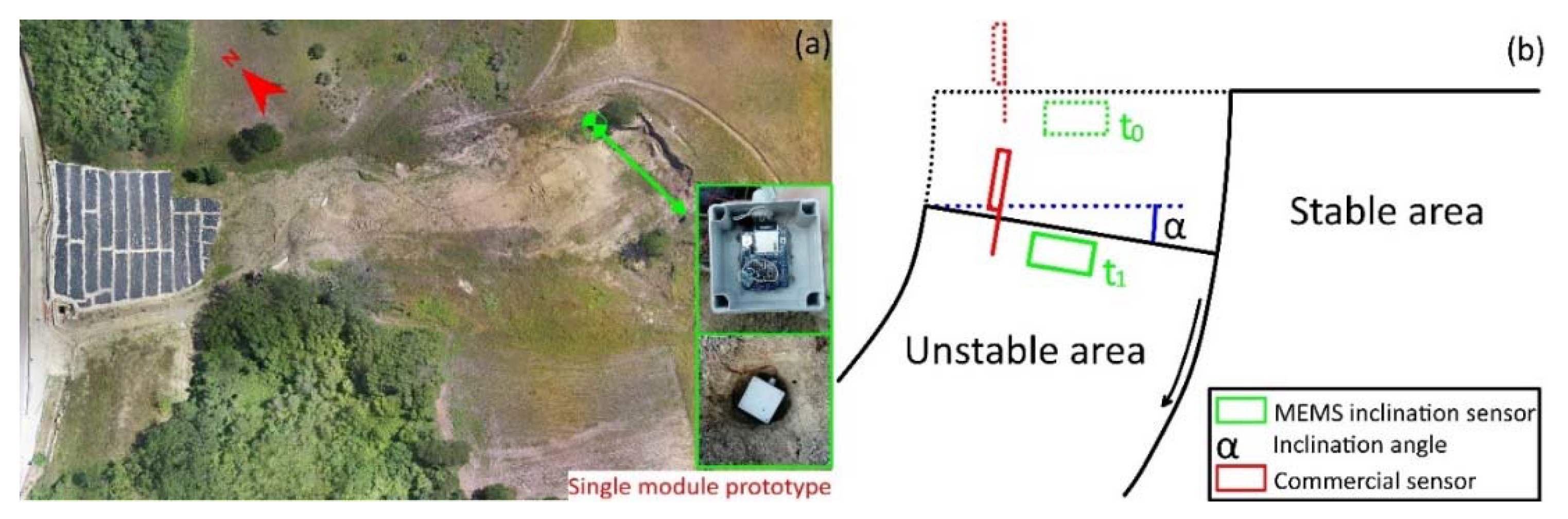
2.3. Field Test
3. Multi-Module Inclinometer
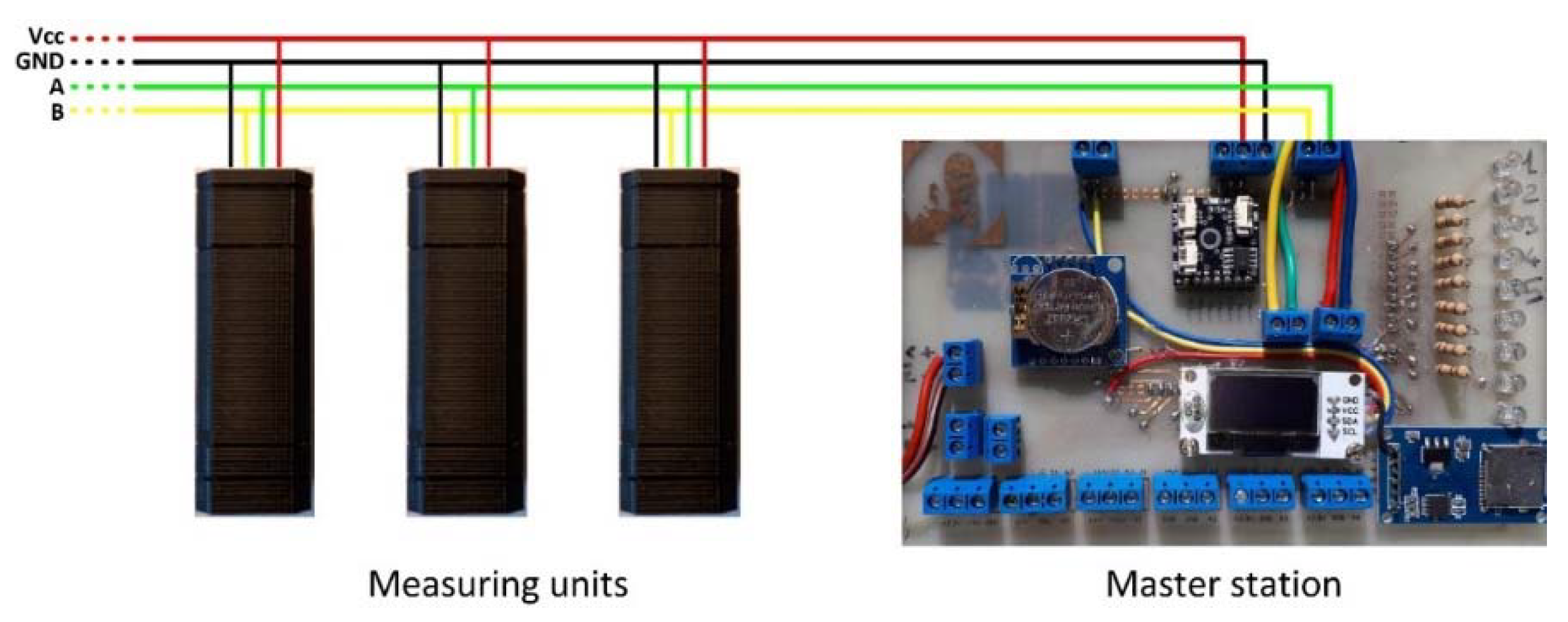
3.1. System Structure
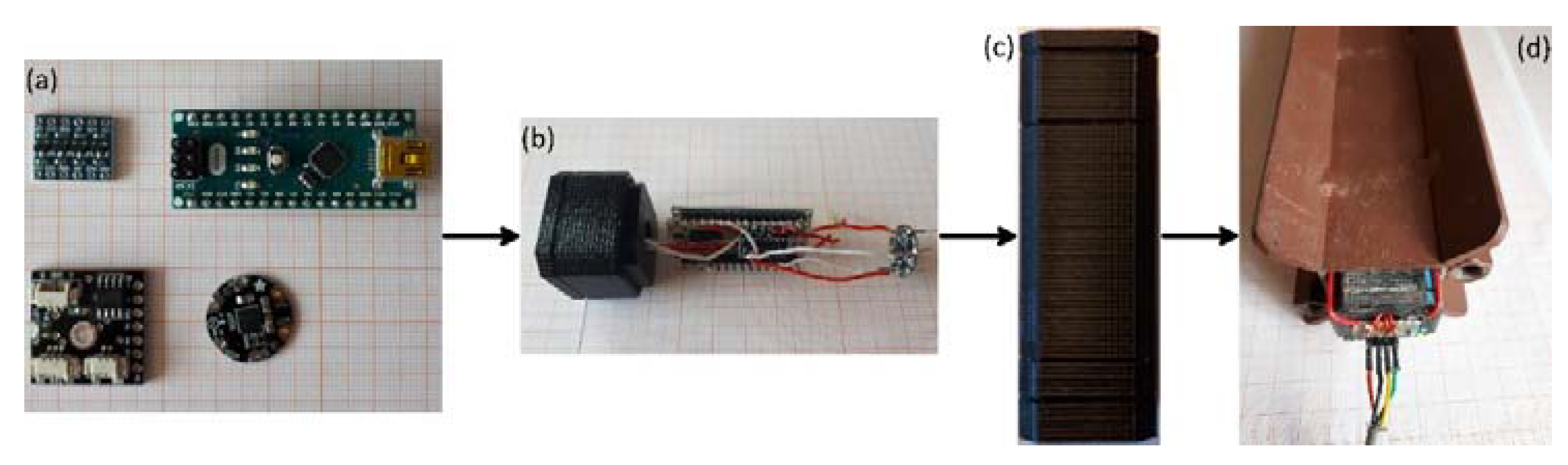
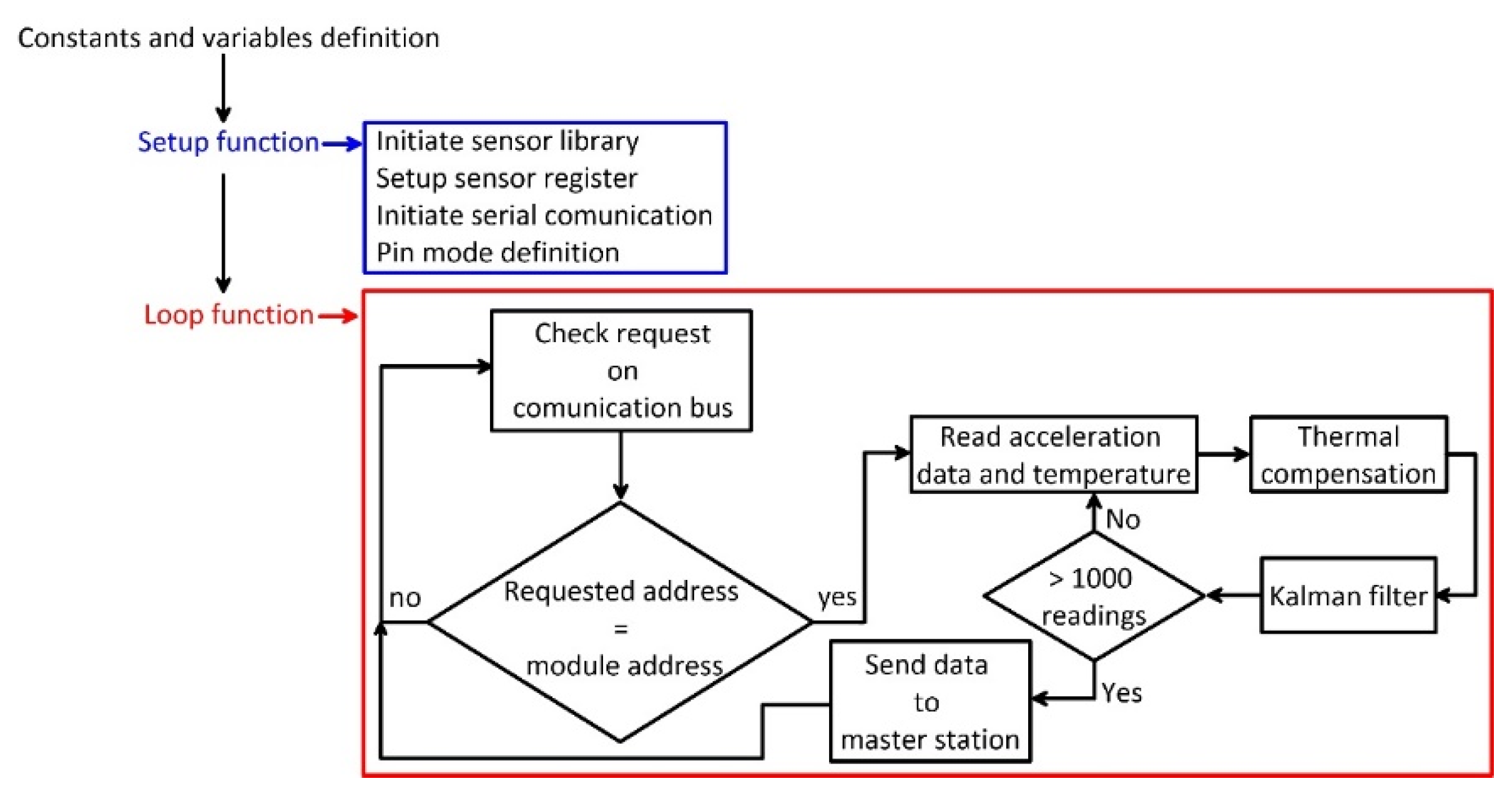
3.2. Module Hardware and Software
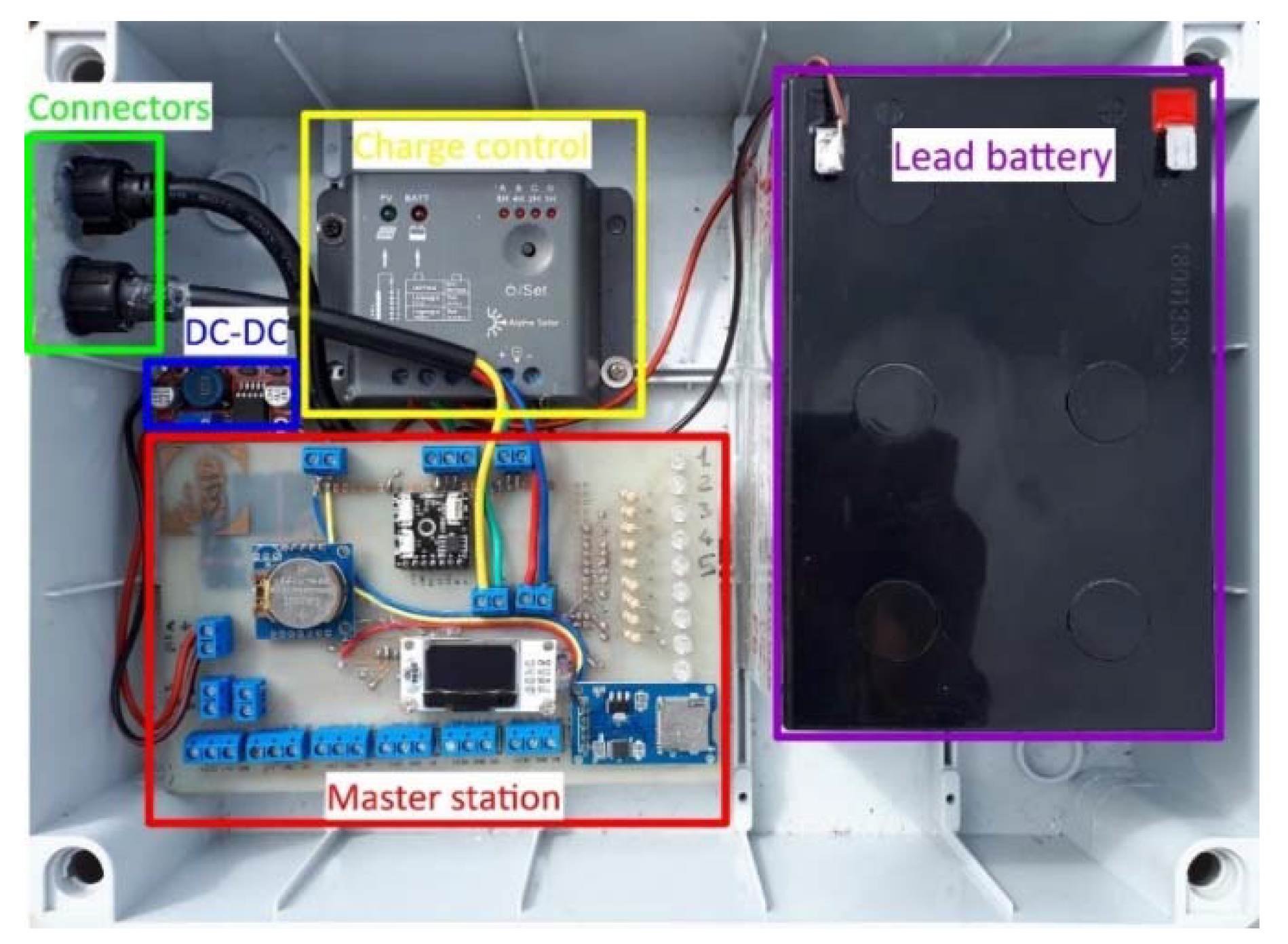
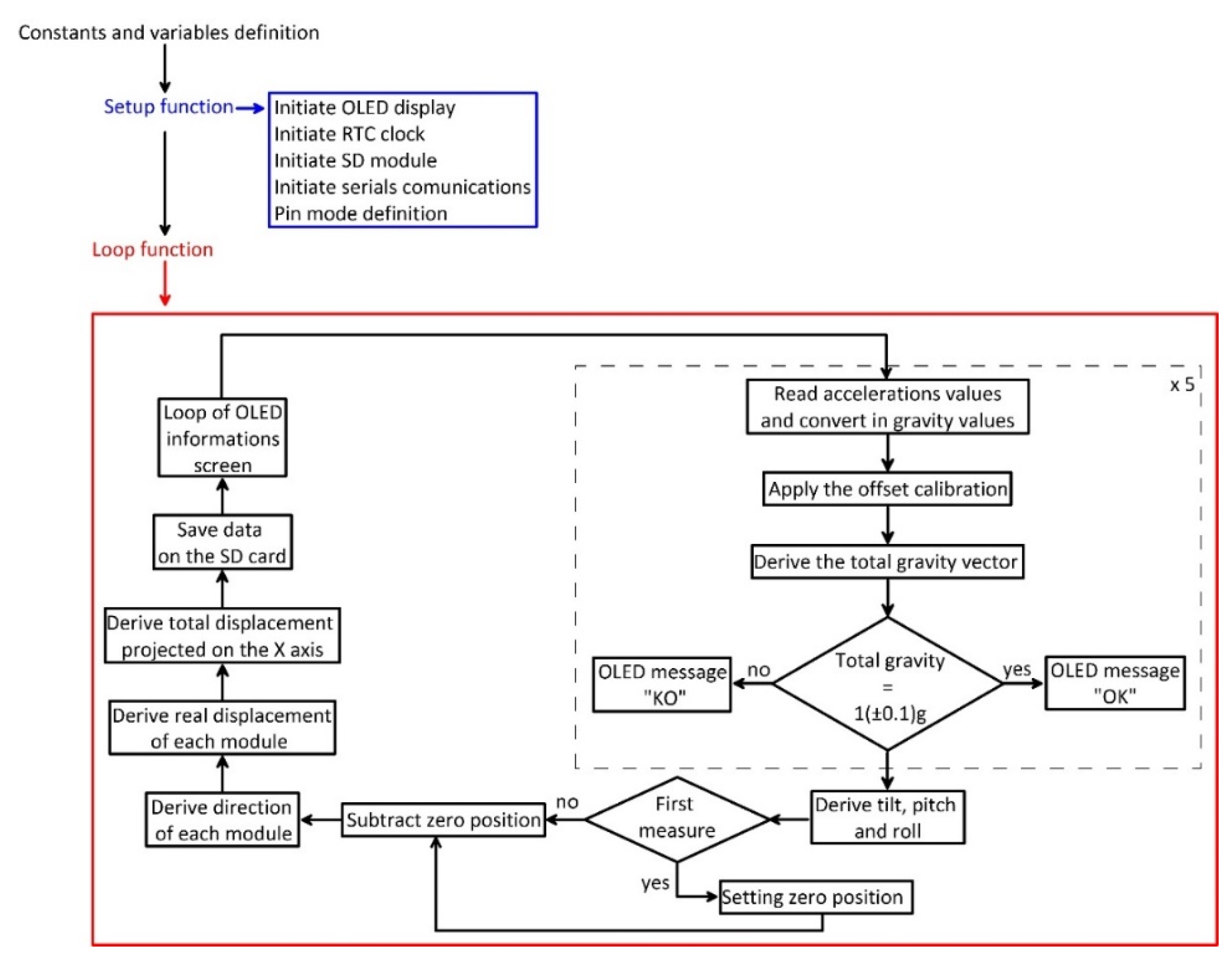
3.3. Master Station Hardware and Software
4. Laboratory Testing
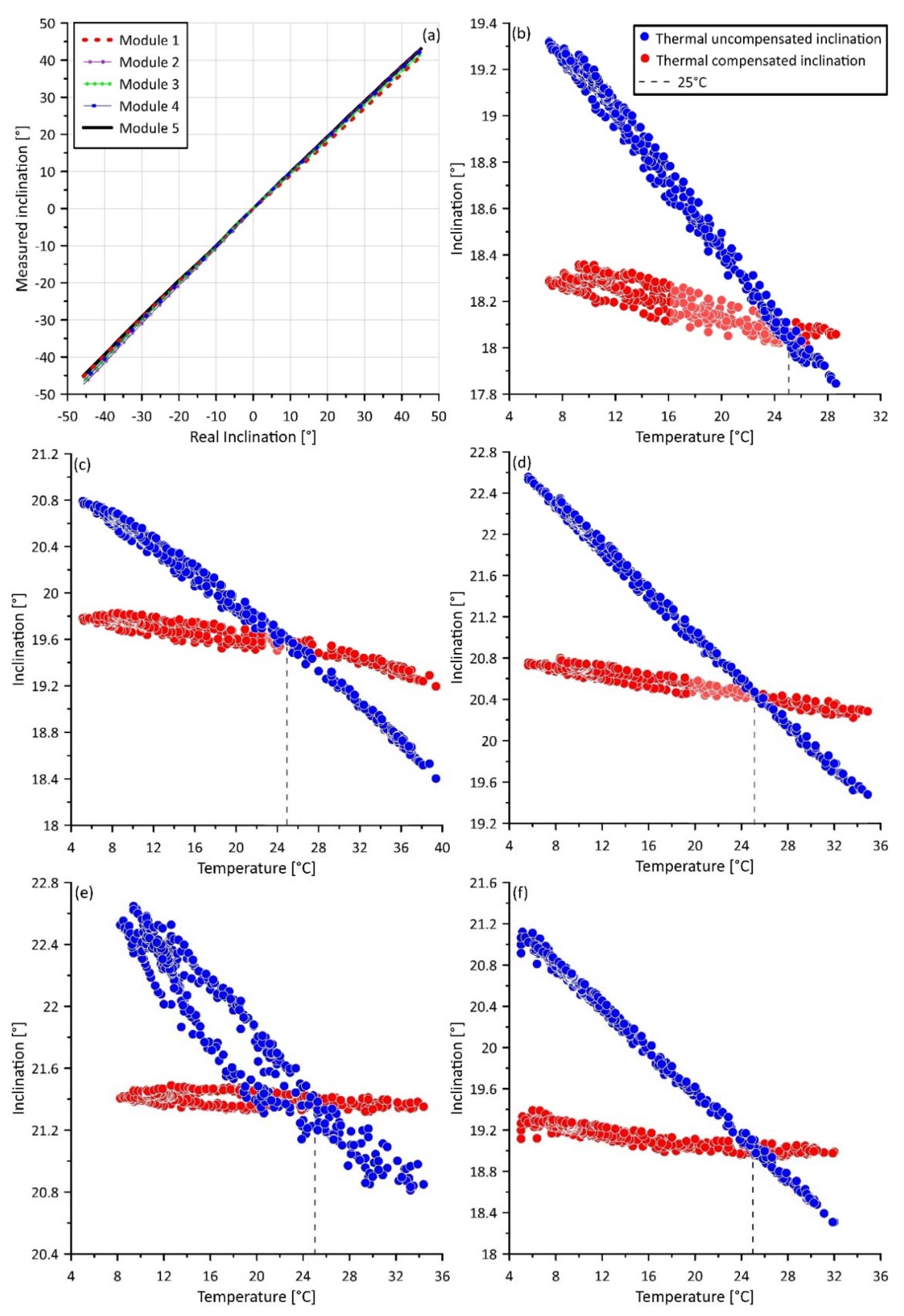
4.1. Linearity and Offset Tests
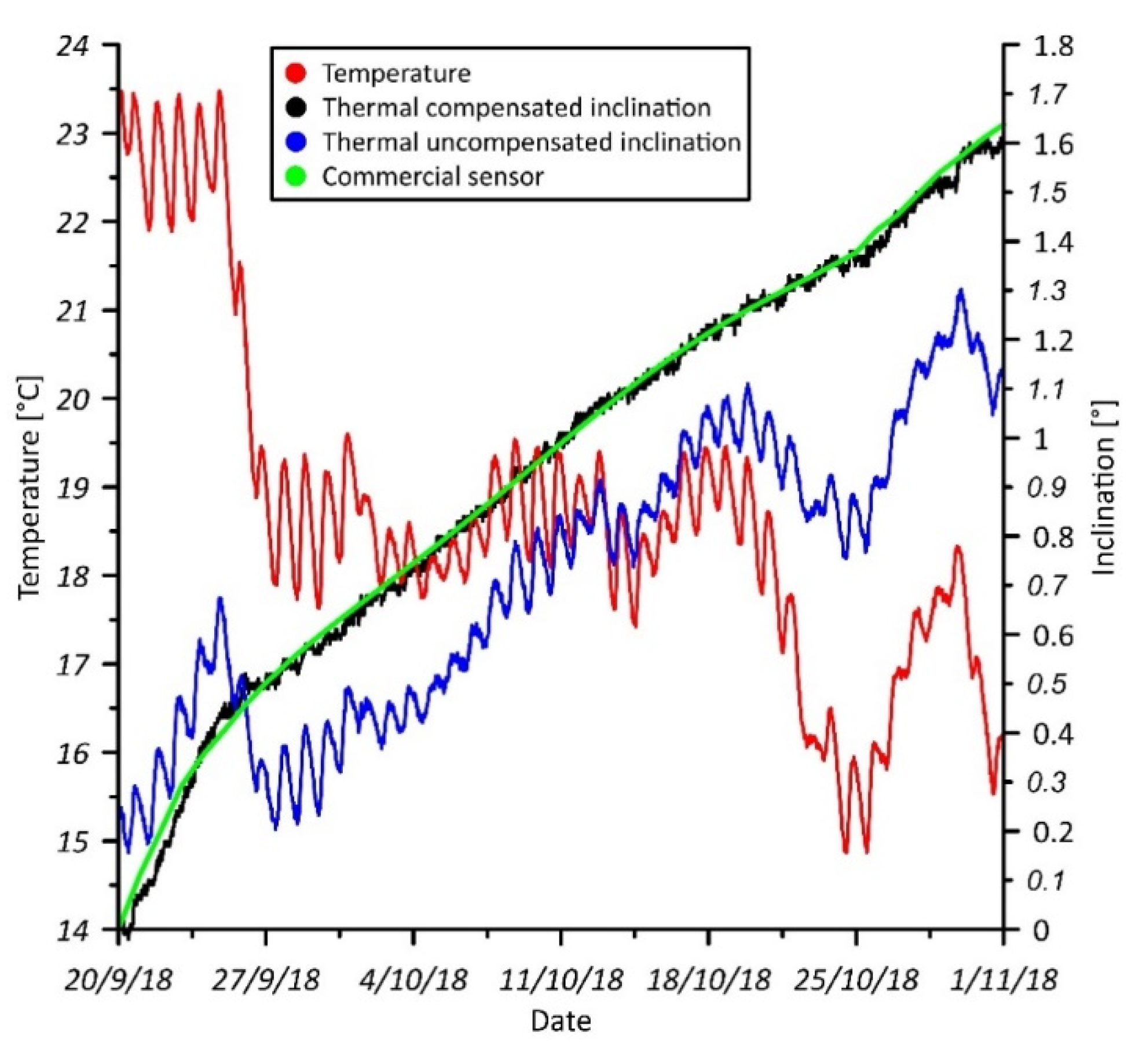
4.2. Thermal Efficiency Test
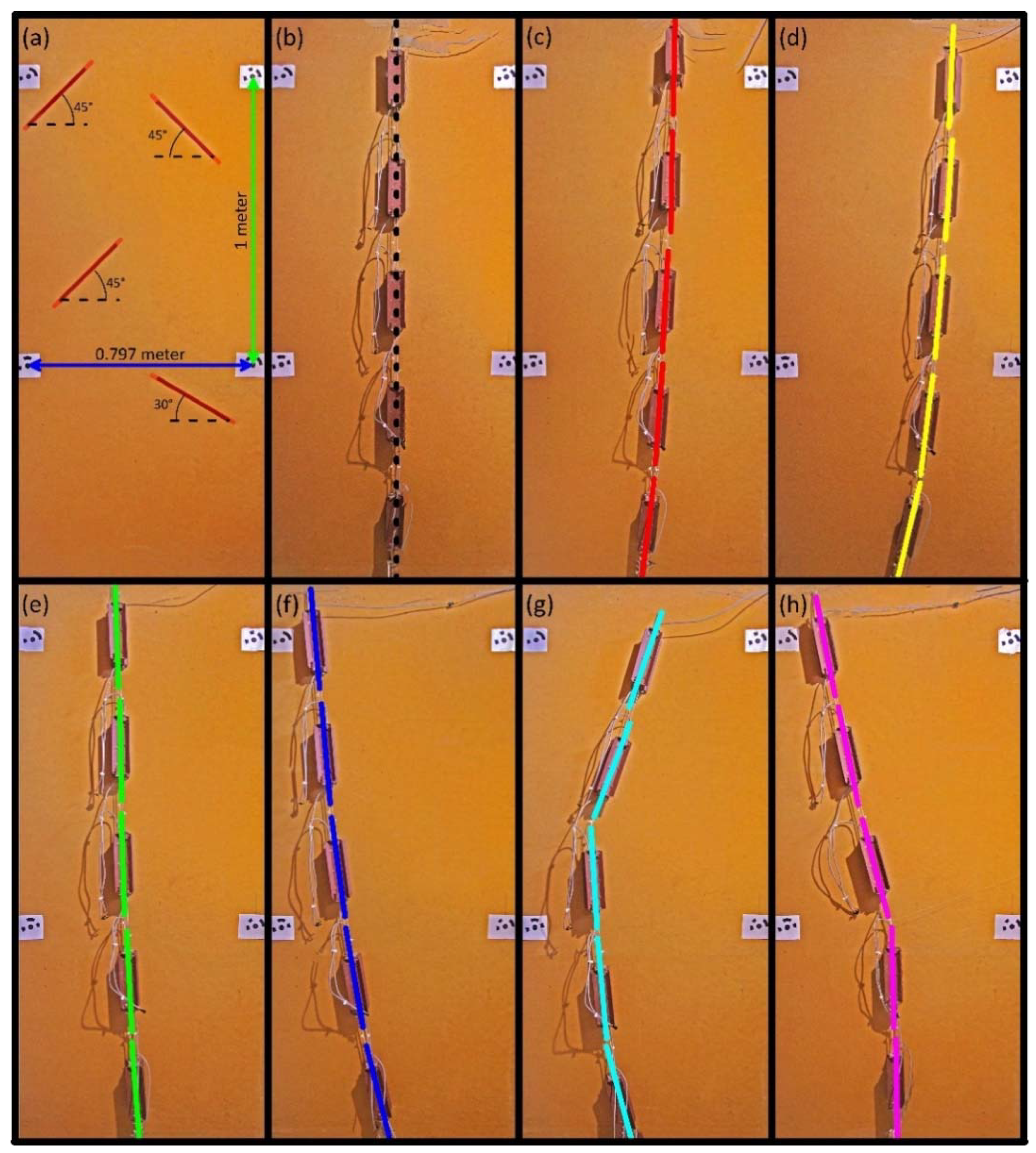
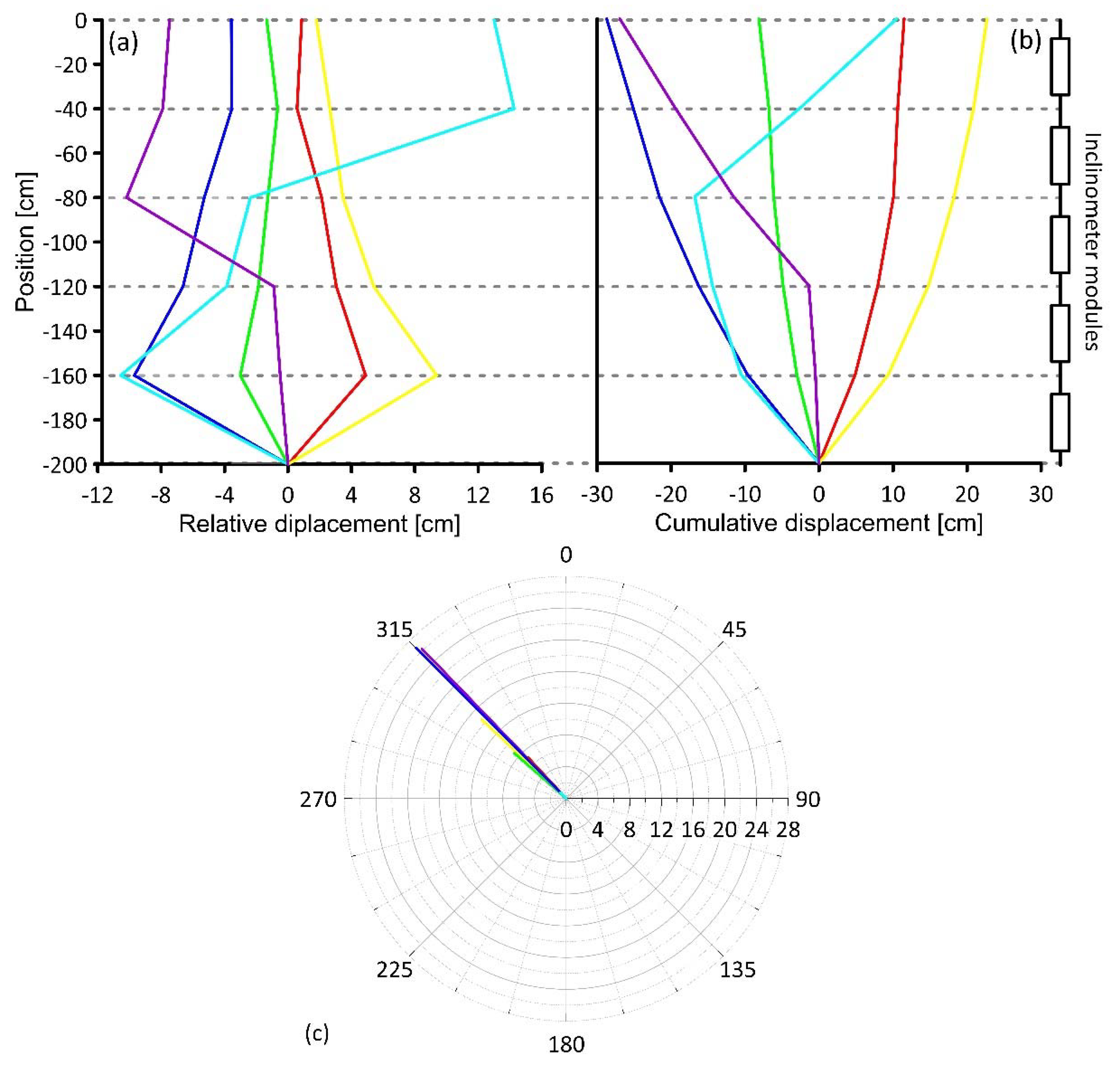
4.3. Multi-Module Inclinometer Test
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cruden, D.M.; Varnes, D.J. Landslide Types and Processes. In Landslides: Investigation and Mitigation; Turner, A.K., Shuster, R.L., Eds.; U.S. National Academy of Sciences, Special Report 247; Transportation Research Board: Washington, DC, USA, 1996; pp. 36–75. [Google Scholar]
- Schulz, W.; Coe, J.A.; Ricci, P.P.; Smoczyk, G.M.; Shurtleff, B.L.; Panosky, J. Landslide kinematics and their potential controls from hourly to decadal timescales: Insights from integrating ground-based InSAR measurements with structural maps and long-term monitoring data. Geomorphology 2017, 285, 121–136. [Google Scholar] [CrossRef]
- Revellino, P.; Guerriero, L.; Grelle, G.; Hungr, O.; Fiorillo, F.; Esposito, L.; Guadagno, F.M. Initiation and propagation of 2005 debris avalanche at Nocera Inferiore (Southern Italy). Ital. J. Geosci. 2013, 132, 366–379. [Google Scholar] [CrossRef]
- Petley, D.N.; Allison, R.J. The mechanics of deep-seated landslides. Earth Surf. Process. Landf. 1997, 22, 747–758. [Google Scholar] [CrossRef]
- Coe, J.A.; Ellis, W.L.; Godt, J.W.; Savage, W.Z.; Savage, J.E.; Michael, J.A.; Kibler, K.D.; Powers, P.S.; Lidke, D.J.; Debray, S. Seasonal movement of the Slumgullion landslide determined from Global Positioning System surveys and field instrumentation, July 1998–March 2002. Eng. Geol. 2003, 68, 67–101. [Google Scholar] [CrossRef]
- Guerriero, L.; Bertello, L.; Cardozo, N.; Berti, M.; Grelle, G.; Revellino, P. Unsteady sediment discharge in earth flows: A case study from the Mount Pizzuto earth flow, southern Italy. Geomorphology 2017, 295, 260–284. [Google Scholar] [CrossRef]
- Guerriero, L.; Revellino, P.; Luongo, A.; Focareta, M.; Grelle, G.; Guadagno, F.M. The Mount Pizzuto earth flow: Deformational pattern and recent thrusting evolution. J. Maps 2016, 12, 1187–1194. [Google Scholar] [CrossRef]
- Guerriero, L.; Guadagno, F.M.; Revellino, P. Estimation of earth-slide displacement from GPS-based surface-structure geometry reconstruction. Landslides 2019, 16, 425–430. [Google Scholar] [CrossRef]
- Corominas, J.; Moya, J.; Lloret, A.; Gili, J.A.; Angeli, M.G.; Pasuto, A.; Silvano, S. Measurement of landslide displacements using a wire extensometer. Eng. Geol. 2000, 55, 149–166. [Google Scholar] [CrossRef]
- Guerriero, L.; Guerriero, G.; Grelle, G.; Guadagno, F.M.; Revellino, P. Brief Communication: A low-cost Arduino®-based wire extensometer for earth flow monitoring. Nat. Hazards Earth Syst. Sci. 2017, 17, 881–885. [Google Scholar] [CrossRef]
- Guerriero, L.; Cardozo, N.; Revellino, P. Earth-flow deformation from GPS surveys, Mount Pizzuto earth flow, southern Italy. Rend. Online Soc. Geol. Ital. 2016, 41, 163–166. [Google Scholar] [CrossRef]
- Li, Y.; Huang, J.; Jiang, S.H.; Huang, F.; Chang, Z. A web-based GPS system for displacement monitoring and failure mechanism analysis of reservoir landslide. Sci. Rep. 2017, 7. [Google Scholar] [CrossRef] [PubMed]
- Berti, M.; Simoni, A. Field evidence of pore pressure diffusion in clayey soils prone to landsliding. J. Geophys. Res. 2010, 115, F03031. [Google Scholar] [CrossRef]
- Stark, T.D.; Choi, H. Slope inclinometers for landslides. Landslides 2008, 5, 339–350. [Google Scholar] [CrossRef]
- Lollino, G.; Allasia, P.; Giordan, D. Inclinometer. In Encyclopedia of Engineering Geology; Bobrowsky, P., Marker, B., Eds.; Encyclopedia of Earth Sciences Series; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Jeng, C.J.; Yo, Y.Y.; Zhong, K.L. Interpretation of slope displacement obtained from inclinometers and simulation of calibration tests. Nat. Hazards 2017, 87, 623–657. [Google Scholar] [CrossRef]
- Simeoni, L.; Mongiovì, L. Inclinometer monitoring of the Castelrotto landslide in Italy. J. Geotech. Geoenviron. Eng. 2007, 133, 653–666. [Google Scholar] [CrossRef]
- Di Maio, C.; Vassallo, R.; Vallario, M.; Pascale, S.; Sdao, F. Structure and kinematics of a landslide in a complex clayey formation of the Italian Southern Apennines. Eng. Geol. 2010, 116, 311–322. [Google Scholar] [CrossRef]
- Uchimura, T.; Towhata, I.; Wang, L.; Nishie, S.; Yamaguchi, H.; Seko, I.; Qiao, J. Precaution and early warning of surface failure of slopes by using tilt sensors. Soils Found. 2015, 55, 1086–1099. [Google Scholar] [CrossRef]
- Ruzza, G.; Guerriero, L.; Revellino, P.; Guadagno, F.M. Thermal Compensation of Low-Cost MEMS Accelerometers for Tilt Measurements. Sensors 2018, 18, 2536. [Google Scholar] [CrossRef]
- Ruzza, G.; Guerriero, L.; Revellino, P.; Guadagno, F.M. A Low-Cost Chamber Prototype for Automatic Thermal Analysis of MEMS IMU Sensors in Tilt Measurements Perspective. Sensors 2019, 19, 2705. [Google Scholar] [CrossRef]
- STMicroelectronics. LSM9DS0, iNEMO Inertial Module: 3D Accelerometer, 3D Gyroscope, 3D Magnetometer; LSM9DS0 Datasheet; STMicroelectronics: Geneva, Switzerland, 2013. [Google Scholar]
- Available online: https://store.arduino.cc/arduino-uno-rev3 (accessed on 11 May 2020).
- Zhu, J.; Wang, W.; Huang, S.; Ding, W. An Improved Calibration Technique for MEMS Accelerometer-Based Inclinometers. Sensors 2020, 20, 452. [Google Scholar] [CrossRef]
- Fisher, C.J. Using an Accelerometer for Inclination Sensing; AN-1057 Application Note; Analog Devices: Norwood, MA, USA, 2010. [Google Scholar]
- Łuczak, S. Guidelines for tilt measurements realized by MEMS accelerometers. Int. J. Precis. Eng. Manuf. 2014, 15, 489–496. [Google Scholar] [CrossRef]
- Łuczak, S.; Grepl, R.; Bodnicki, M. Selection of MEMS accelerometers for tilt measurements. J. Sens. 2017, 2017, 9796146. [Google Scholar] [CrossRef]
- Gietzelt, M.; Wolf, K.H.; Marschollek, M.; Haux, R. Performance comparison of accelerometer calibration algorithms based on 3D-ellipsoid fitting methods. Comput. Methods Progr. Biomed. 2013, 111, 62–71. [Google Scholar] [CrossRef] [PubMed]
- Olivares, A.; Ruiz-Garcia, G.; Olivares, G.; Górriz, J.M.; Ramirez, J. Automatic Determination of Validity of Input Data Used in Ellipsoid Fitting MARG Calibration Algorithms. Sensors 2013, 13, 11797–11817. [Google Scholar] [CrossRef] [PubMed]
- Available online: https://sites.google.com/site/sailboatinstruments1/home (accessed on 11 May 2020).
- Available online: http://www.strago.it/it/ (accessed on 11 May 2020).
- Available online: https://store.arduino.cc/arduino-nano (accessed on 11 May 2020).
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; TR 95-041; UNC-Chapel Hill: Chapel Hill, NC, USA, 2006. [Google Scholar]
- Grewal, M.S.; Andrews, A.P. Kalman Filtering: Theory and Practice Using MATLAB, 2nd ed.; John Wiley & Sons: New York, NY, USA, 2001; ISBN 0-471-26638-8. [Google Scholar]
- Li, C.; Azzam, R.; Fernàndez-Steeger, T.M. Kalman filters in geotechnical monitoring of ground subsidence using data from MEMS sensors. Sensors 2016, 16, 1109. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Li, X.; Zhang, X. An adaptive compensation algorithm for temperature drift of micro-electro-mechanical systems gyroscopes using a strong tracking kalman filter. Sensors 2015, 15, 11222–11238. [Google Scholar] [CrossRef] [PubMed]
- Venkatesh, K.A.; Mathivanan, N. Design of MEMS accelerometer based acceleration measurement system for automobiles. Meas. Sci. Rev. 2012, 12, 189–194. [Google Scholar] [CrossRef]
- Sabatelli, S.; Galgani, M.; Fanucci, L.; Rocchi, A. A Double-Stage Kalman Filter for Orientation Tracking with an Integrated Processor in 9-D IMU. IEEE Trans. Instrum. Meas. 2013, 62, 590–598. [Google Scholar] [CrossRef]
- Texas Instruments, The RS-485 Design Guide. 2017. Available online: http://www.ti.com/lit/an/slla272c/slla272c.pdf (accessed on 11 May 2020).
- Available online: https://store.arduino.cc/arduino-mega-2560-rev3 (accessed on 11 May 2020).
- Dunnicliff, J. Geotechnical Instrumentation for Monitoring Field Performance; Wiley: New York, NY, USA, 1993; 608p. [Google Scholar]
- Tilt Measurement Using a Low-G 3-Axis Accelerometer. AN4509 Application Note; DocID026445 Rev 1; ST Microelectronics: Genebra, Suíça, 2014.
- Dae, W.H.; Jong, M.K.; Yousok, K.; Hyo, S.P. Development and application of a wireless MEMS-based borehole inclinometer for automated measurement of ground movement. Autom. Constr. 2018, 87, 49–59. [Google Scholar] [CrossRef]
- Ha, D.W.; Park, H.S.; Choi, S.W.; Kim, Y. A Wireless MEMS-Based Inclinometer Sensor Node for Structural Health Monitoring. Sensors 2013, 13, 16090–16104. [Google Scholar] [CrossRef]
- Available online: https://www.agisoft.com (accessed on 11 May 2020).
- Available online: https://www.astm.org (accessed on 11 May 2020).
- Machan, G.; Bennet, V.G. Use of Inclinometers for Geotechnical Instrumentation on Transportation Projects: State of the Practice; Transportation Research Circular, E-C129; Transportation Research Board: Washington, DC, USA, 2008. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE (±°) | Module 1 | Module 2 | Module 3 | Module 4 | Module 5 |
|---|---|---|---|---|---|
| ±10 ° | 0.22 | 0.16 | 0.20 | 0.16 | 0.12 |
| ±20 ° | 0.61 | 0.47 | 0.55 | 0.45 | 0.35 |
| ±45 ° | 1.54 | 1.19 | 1.42 | 1.13 | 0.89 |
| RMSE (°) | Module 1 | Module 2 | Module 3 | Module 4 | Module 5 |
|---|---|---|---|---|---|
| Thermal compensated | 0.17 | 0.18 | 0.19 | 0.18 | 0.10 |
| Thermal uncompensated | 1.33 | 0.83 | 0.84 | 1.28 | 0.73 |
| Variation (%) | 87 | 74 | 77 | 86 | 86 |
| Image | Module 1 | Module 2 | Module 3 | Module 4 | Module 5 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Est. | Meas. | Est. | Meas. | Est. | Meas. | Est. | Meas. | Est. | Meas. | |
| (c) | 1.40 | 1.23 | 0.94 | 0.81 | 2.98 | 3.04 | 4.00 | 4.37 | 7.09 | 7.03 |
| (d) | 2.41 | 2.56 | 3.76 | 3.79 | 4.83 | 4.97 | 7.71 | 7.78 | 13.31 | 13.56 |
| (e) | −1.89 | −1.92 | −0.85 | −0.93 | −1.97 | −1.81 | −2.72 | −2.66 | −4.16 | −4.31 |
| (f) | −5.44 | −5.13 | −4.98 | −5.08 | −7.76 | −7.58 | −9.64 | −9.95 | −13.72 | −14.02 |
| (g) | 19.27 | 18.95 | 20.75 | 20.89 | −3.28 | −3.39 | −5.36 | −5.54 | −15.48 | −15.30 |
| (h) | −10.56 | −10.76 | −12.09 | −11.38 | −15.01 | −14.75 | −1.07 | −1.27 | −0.82 | −0.70 |
| RMSE (°) | ±0.22 | ±0.30 | ±0.16 | ±0.21 | ±0.19 | |||||
| Accuracy | ±0.38%/m | ±0.53%/m | ±0.28%/m | ±0.36%/m | ±0.33%/m | |||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruzza, G.; Guerriero, L.; Revellino, P.; Guadagno, F.M. A Multi-Module Fixed Inclinometer for Continuous Monitoring of Landslides: Design, Development, and Laboratory Testing. Sensors 2020, 20, 3318. https://doi.org/10.3390/s20113318
Ruzza G, Guerriero L, Revellino P, Guadagno FM. A Multi-Module Fixed Inclinometer for Continuous Monitoring of Landslides: Design, Development, and Laboratory Testing. Sensors. 2020; 20(11):3318. https://doi.org/10.3390/s20113318
Chicago/Turabian StyleRuzza, Giuseppe, Luigi Guerriero, Paola Revellino, and Francesco M. Guadagno. 2020. "A Multi-Module Fixed Inclinometer for Continuous Monitoring of Landslides: Design, Development, and Laboratory Testing" Sensors 20, no. 11: 3318. https://doi.org/10.3390/s20113318
APA StyleRuzza, G., Guerriero, L., Revellino, P., & Guadagno, F. M. (2020). A Multi-Module Fixed Inclinometer for Continuous Monitoring of Landslides: Design, Development, and Laboratory Testing. Sensors, 20(11), 3318. https://doi.org/10.3390/s20113318