Local Bearing Estimation for a Swarm of Low-Cost Miniature Robots



Abstract
1. Introduction
2. Related Works
2.1. Range and Bearing in Robotics
2.2. Range and Bearing for Miniature Robots
2.3. Optimisation
2.4. Summary
3. Bearing Model
3.1. General Bearing Model
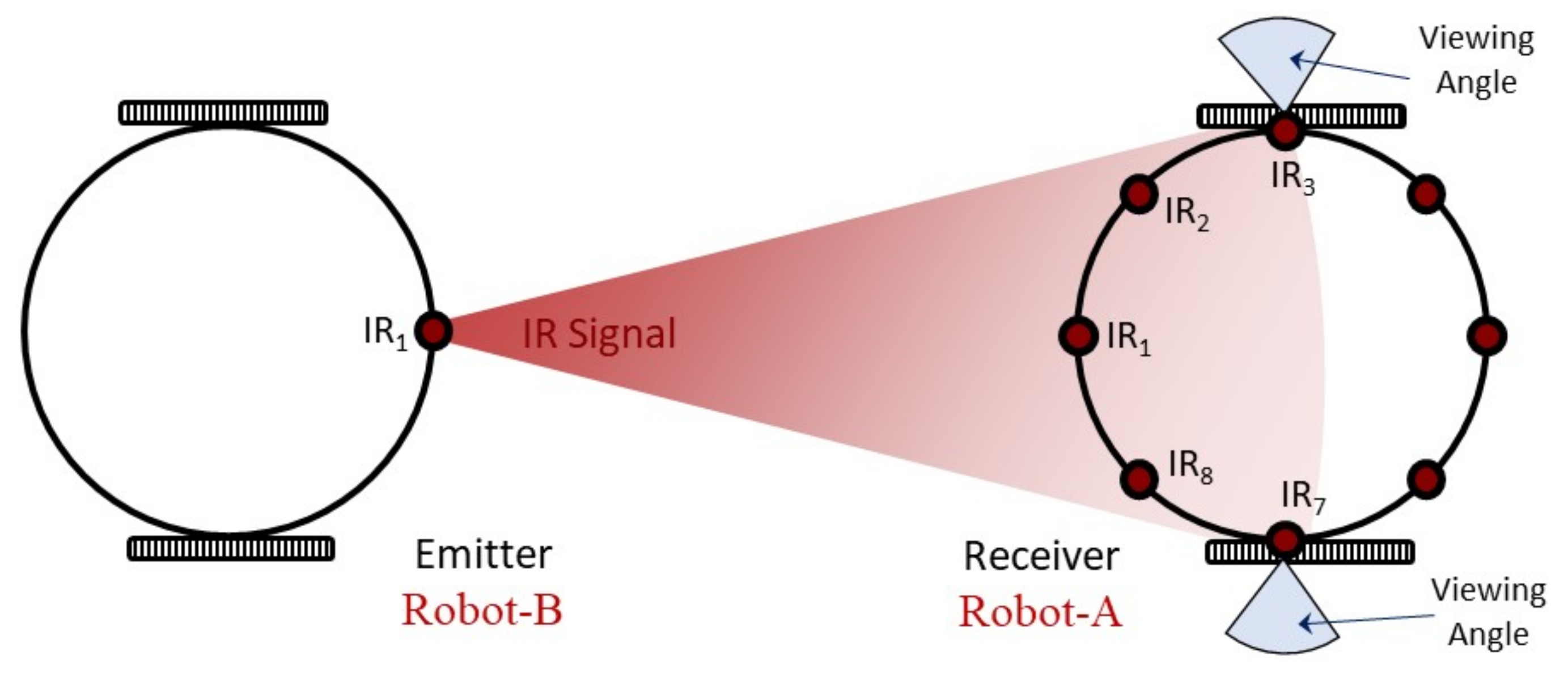
3.2. Proposed Bearing Model
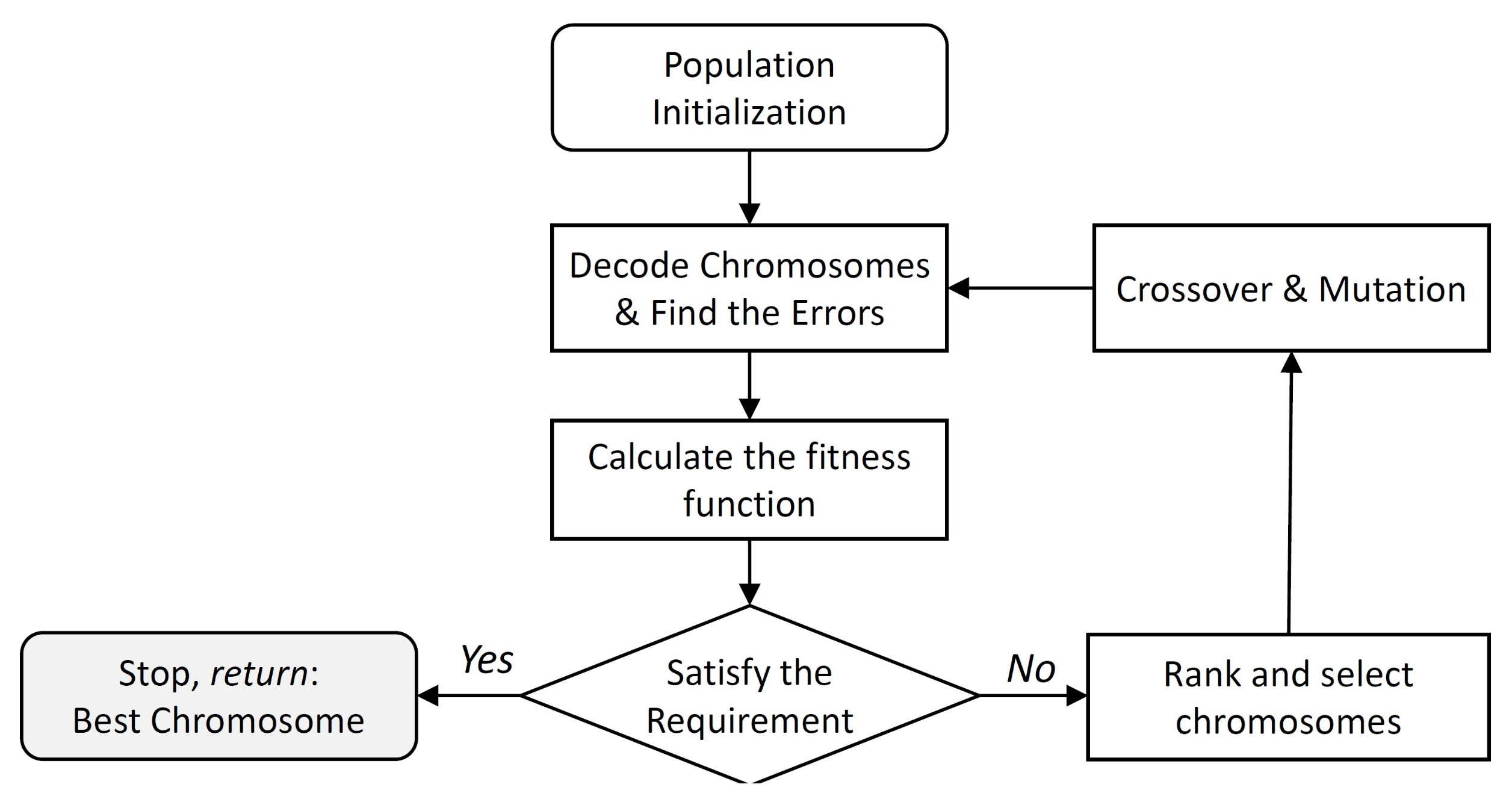
4. Optimisation of Bearing Model
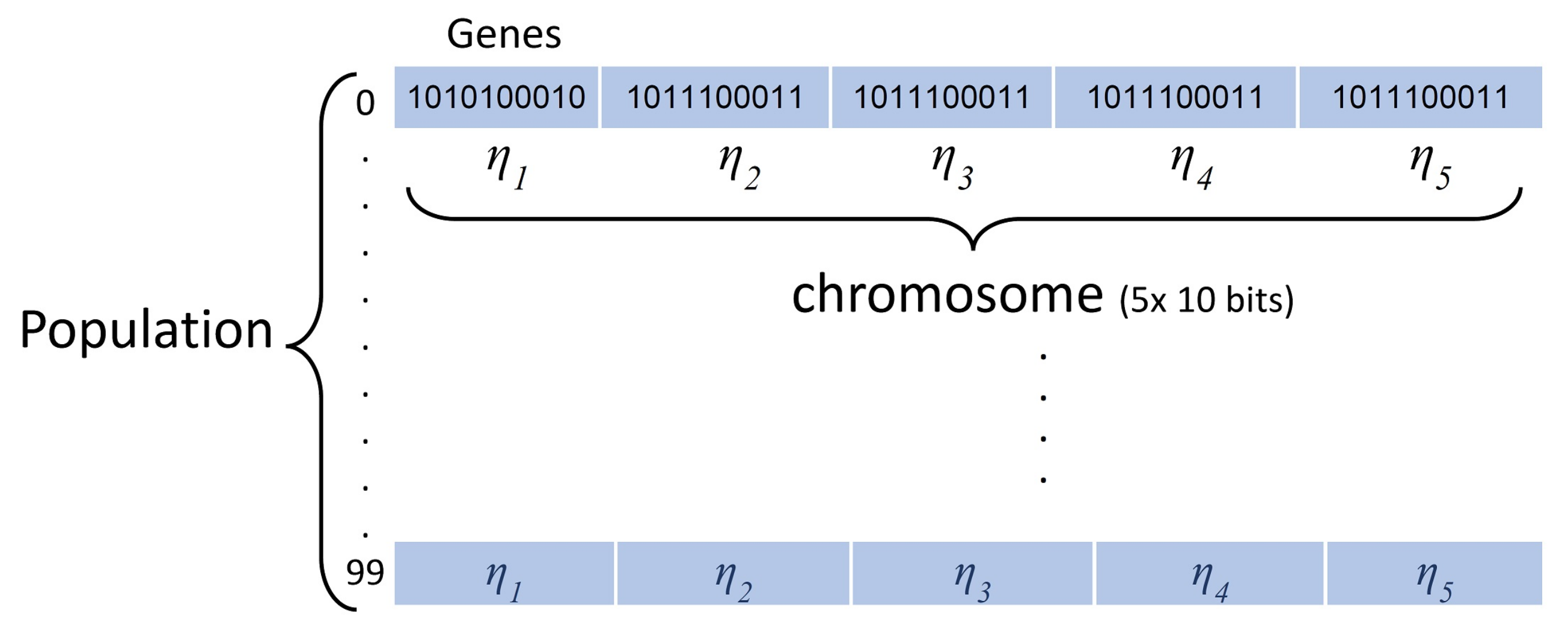
4.1. Initialisation
4.2. Fitness Function Evaluation
4.3. Selection
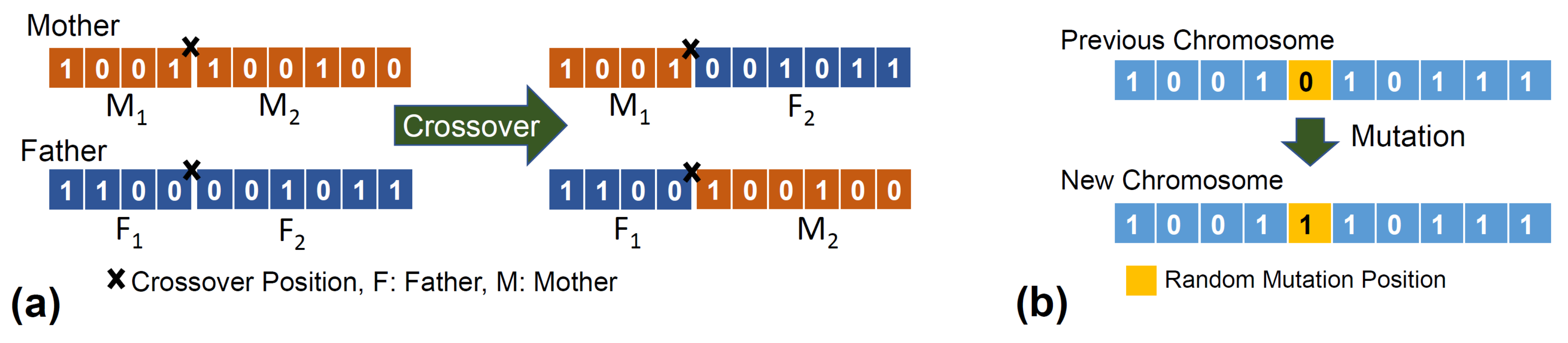
4.4. Crossover and Mutation
5. Experiments
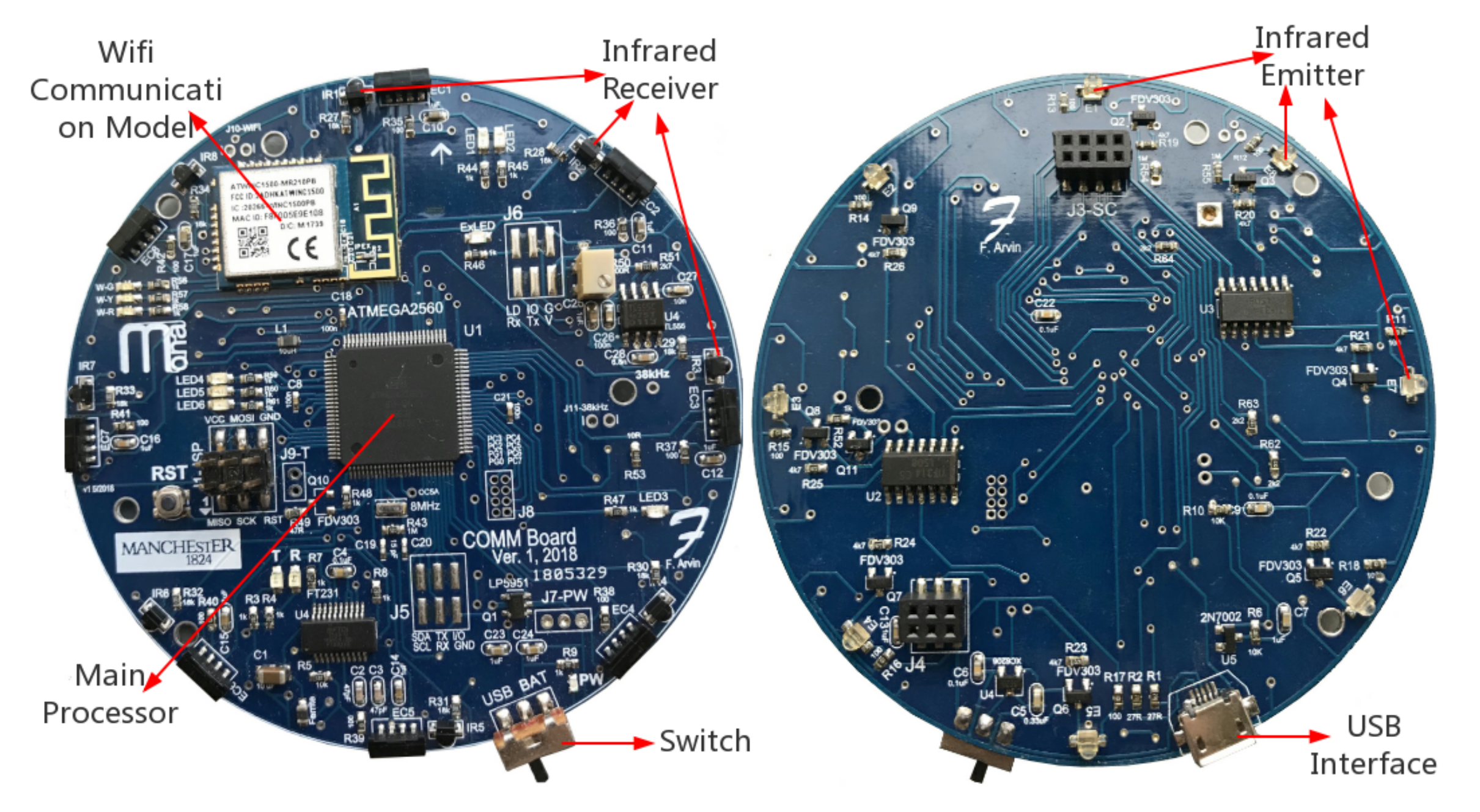
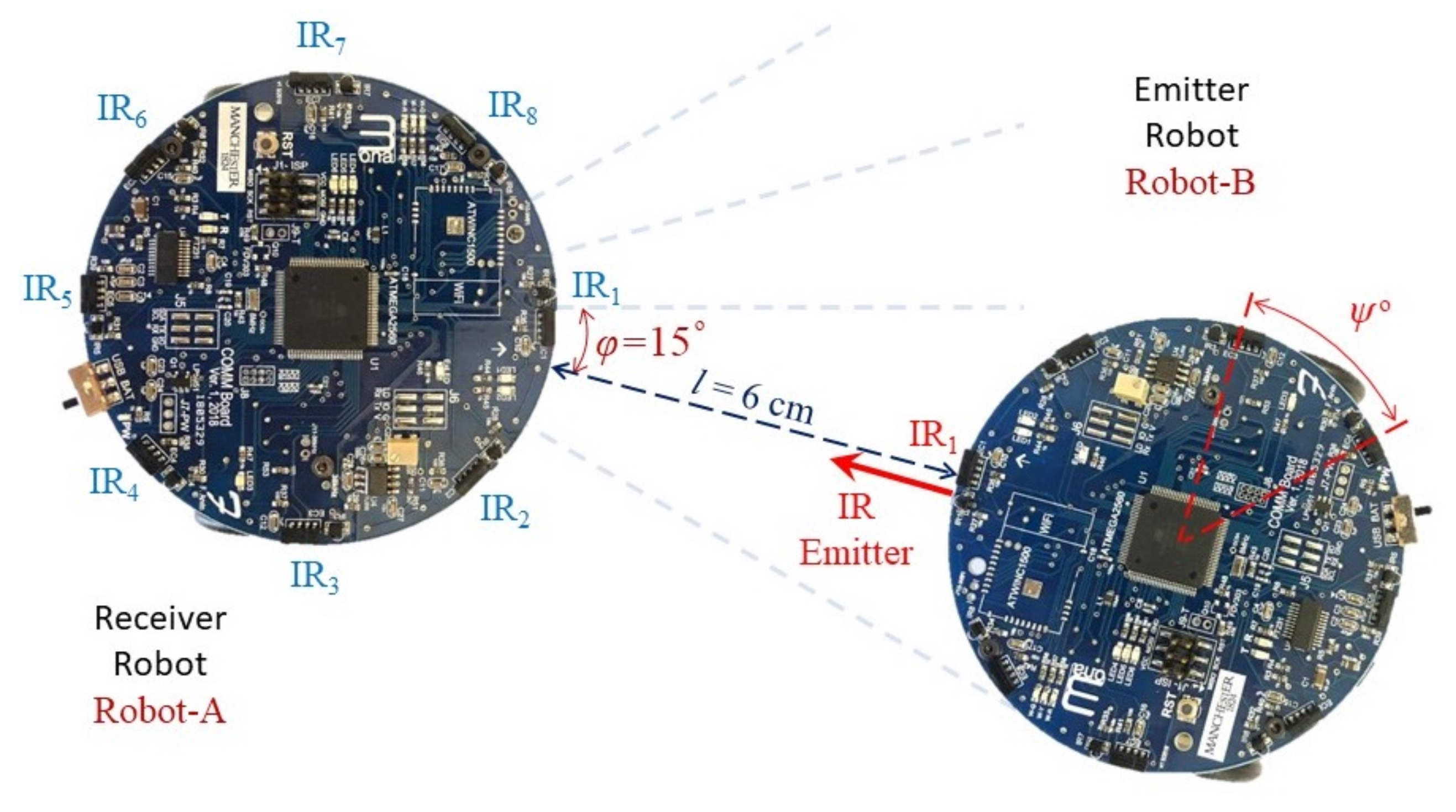
5.1. Hardware Platform
5.2. Experimental Setup
6. Results
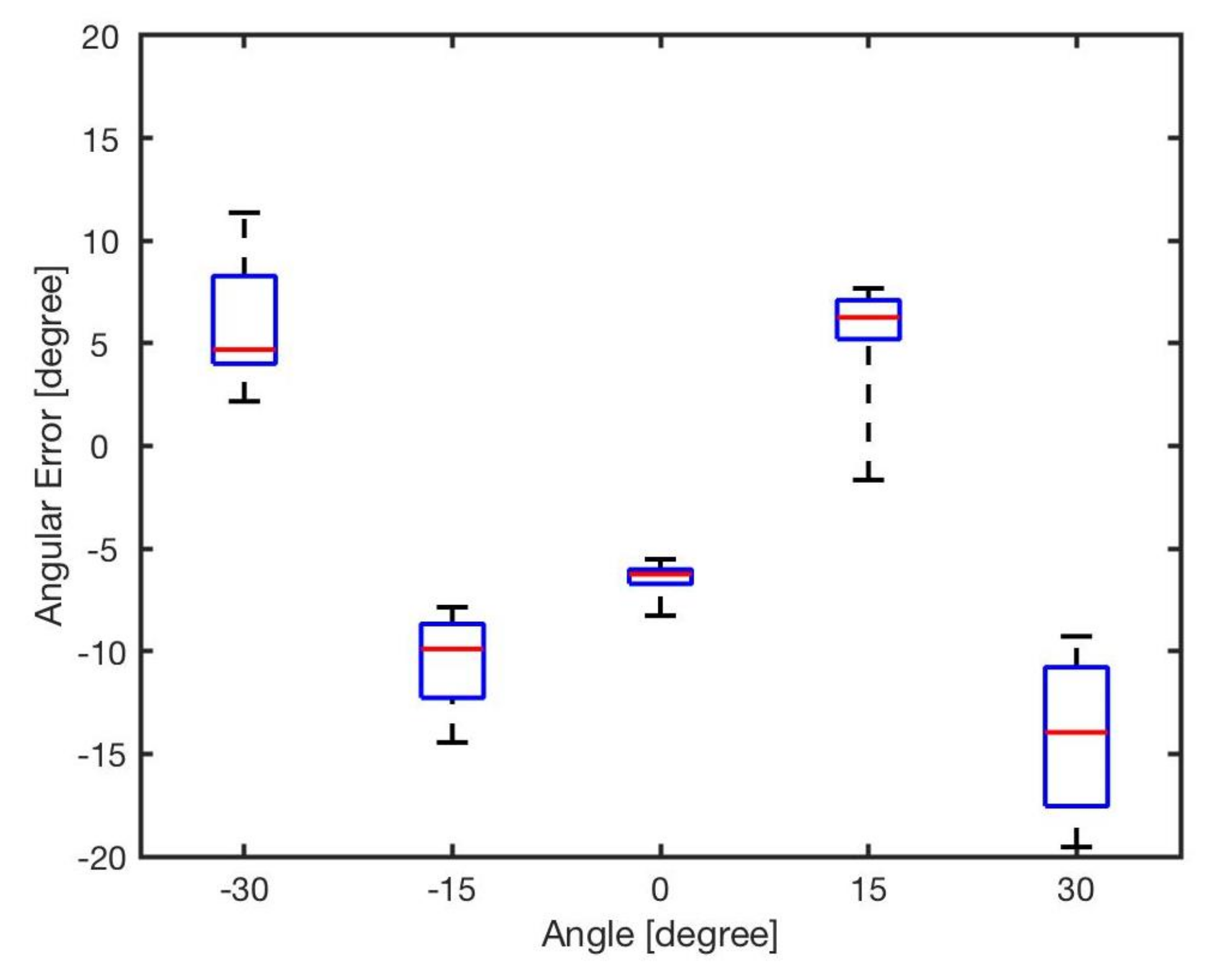
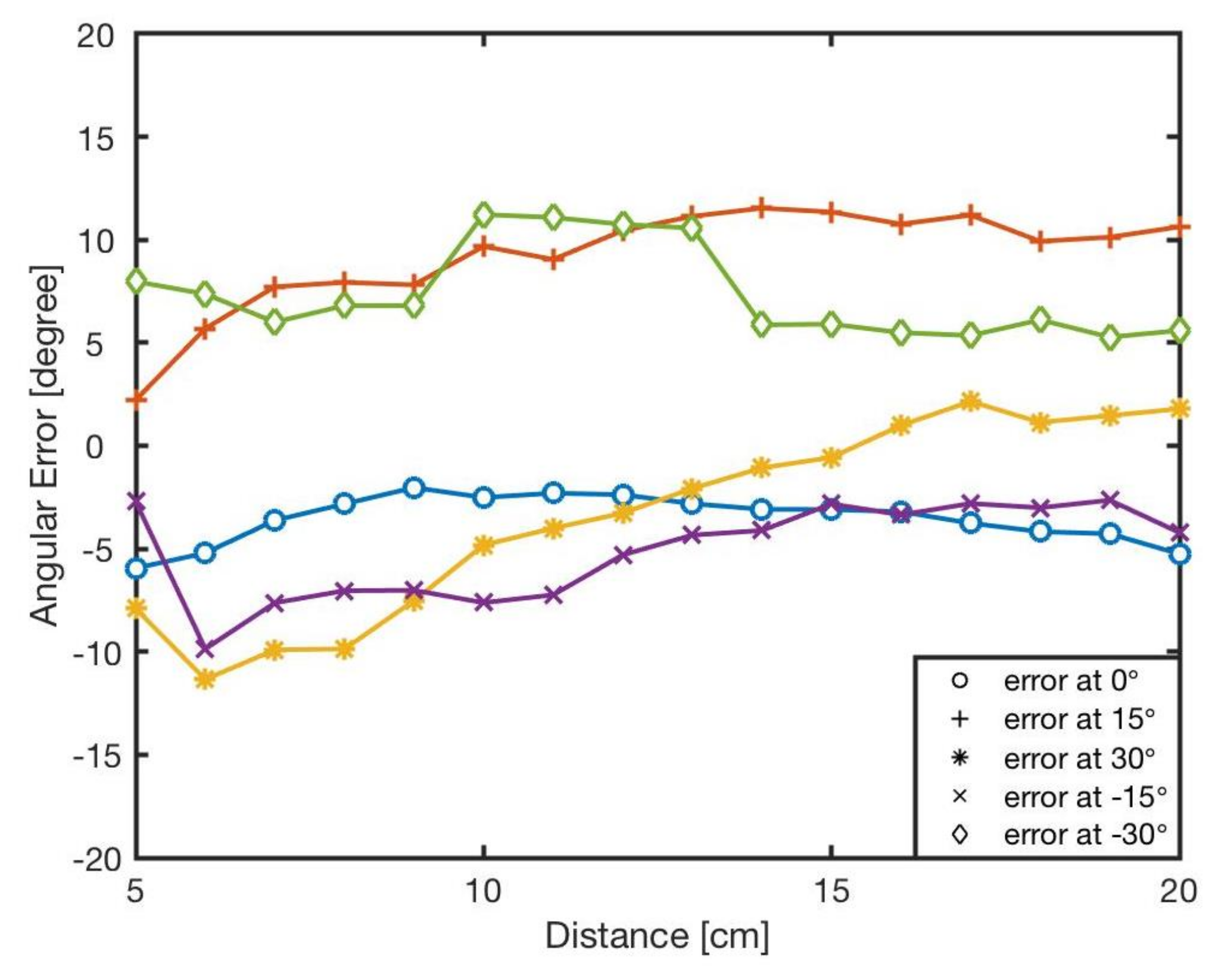
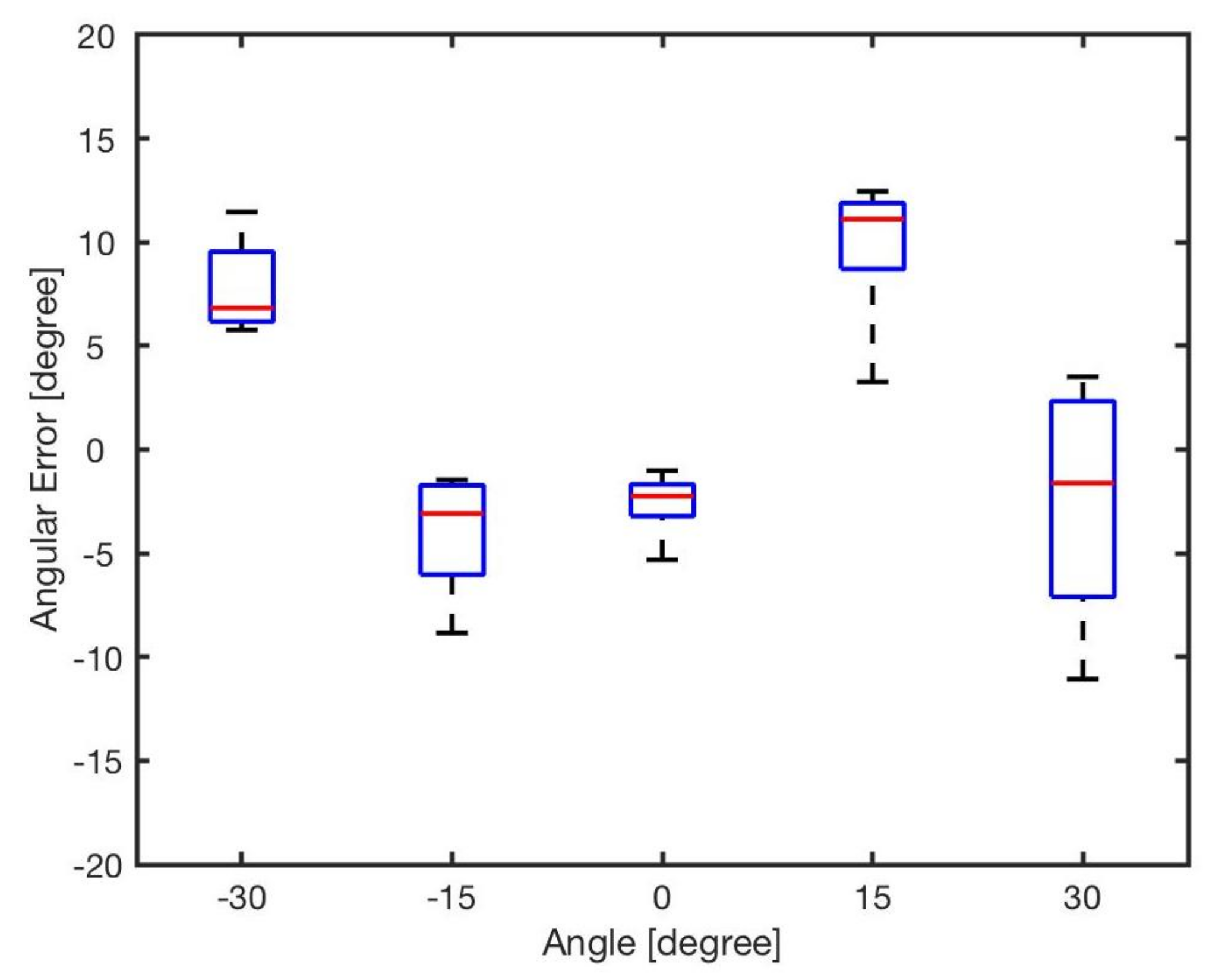
6.1. Experiment Results
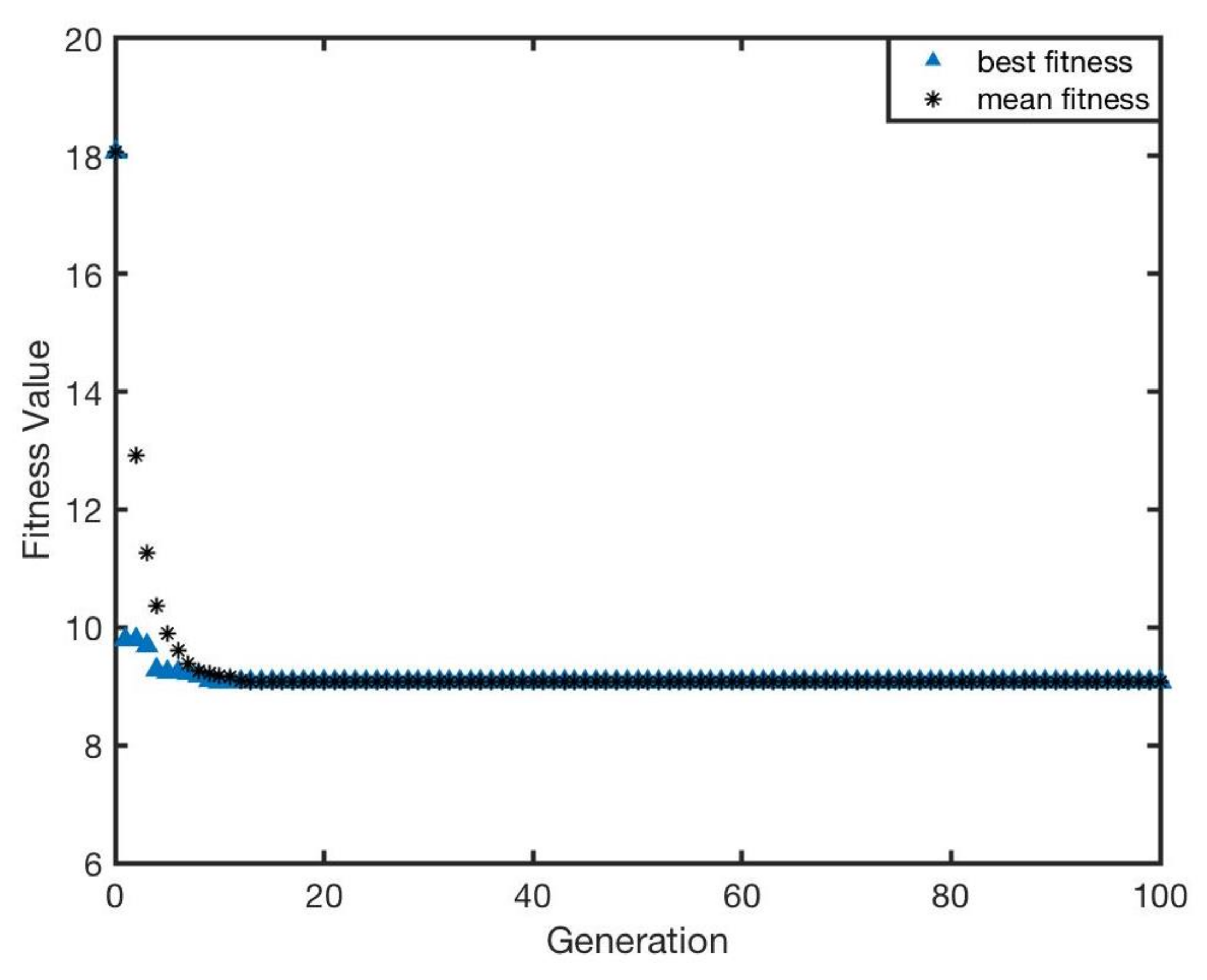
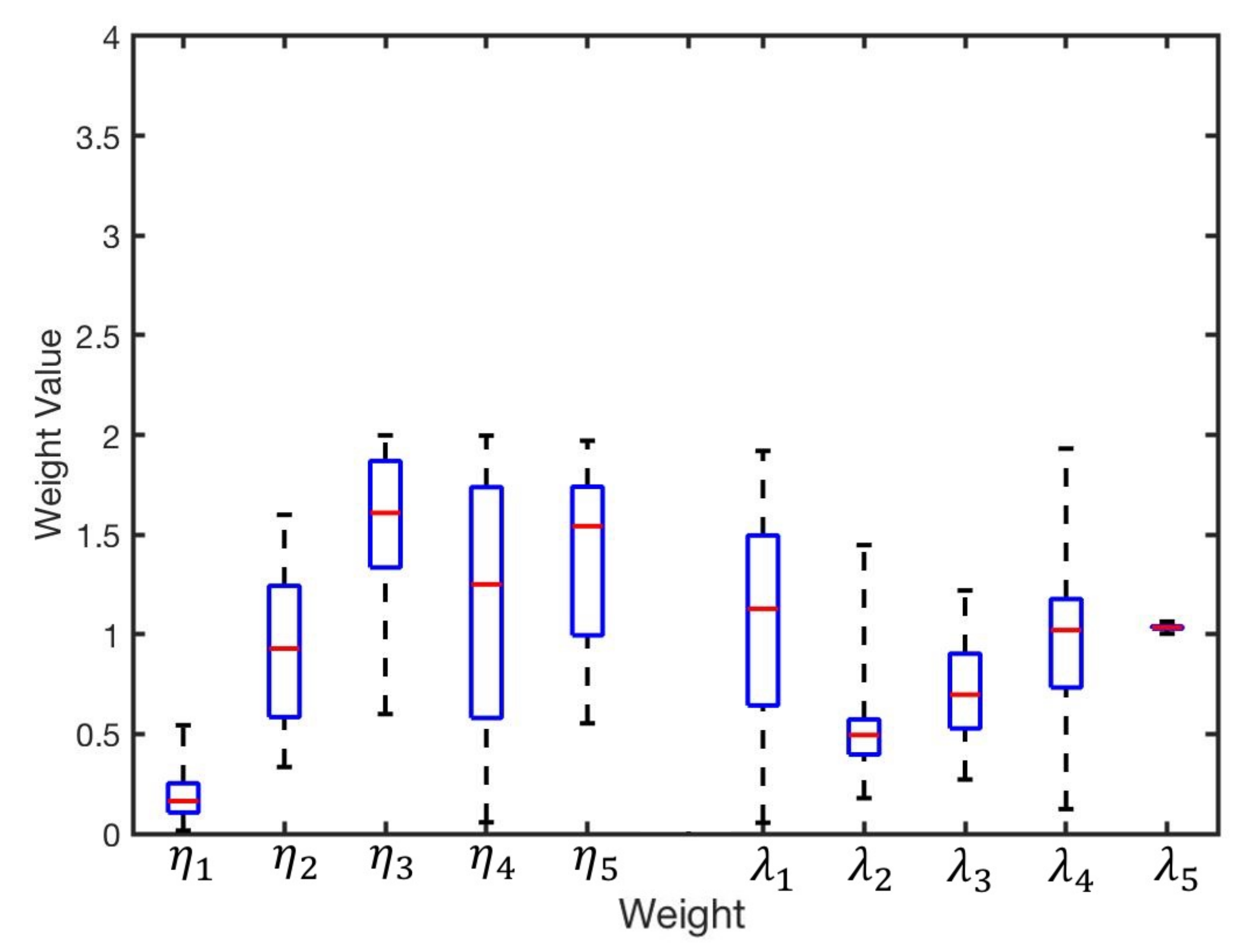
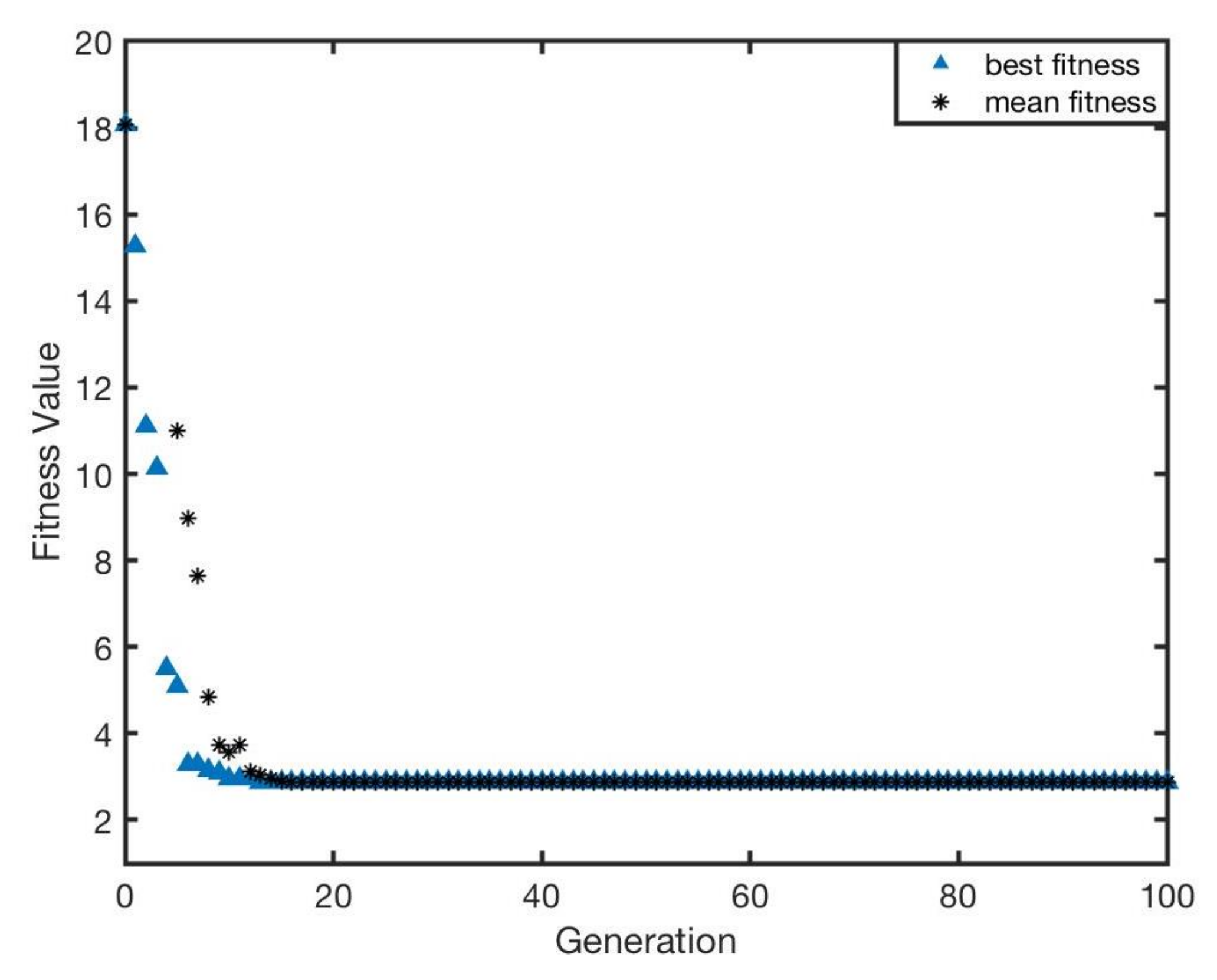
6.2. Optimisation of Bearing Model
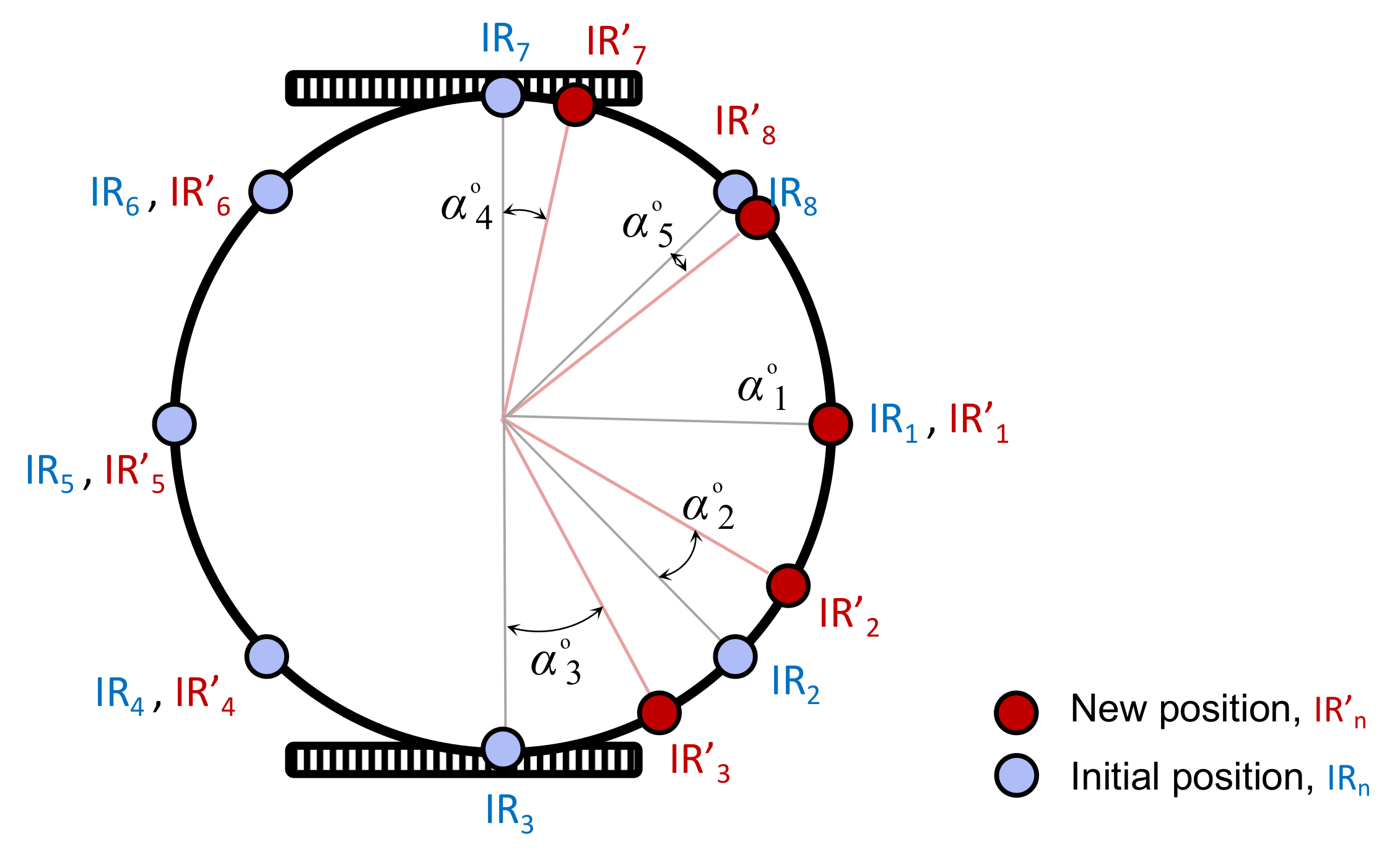
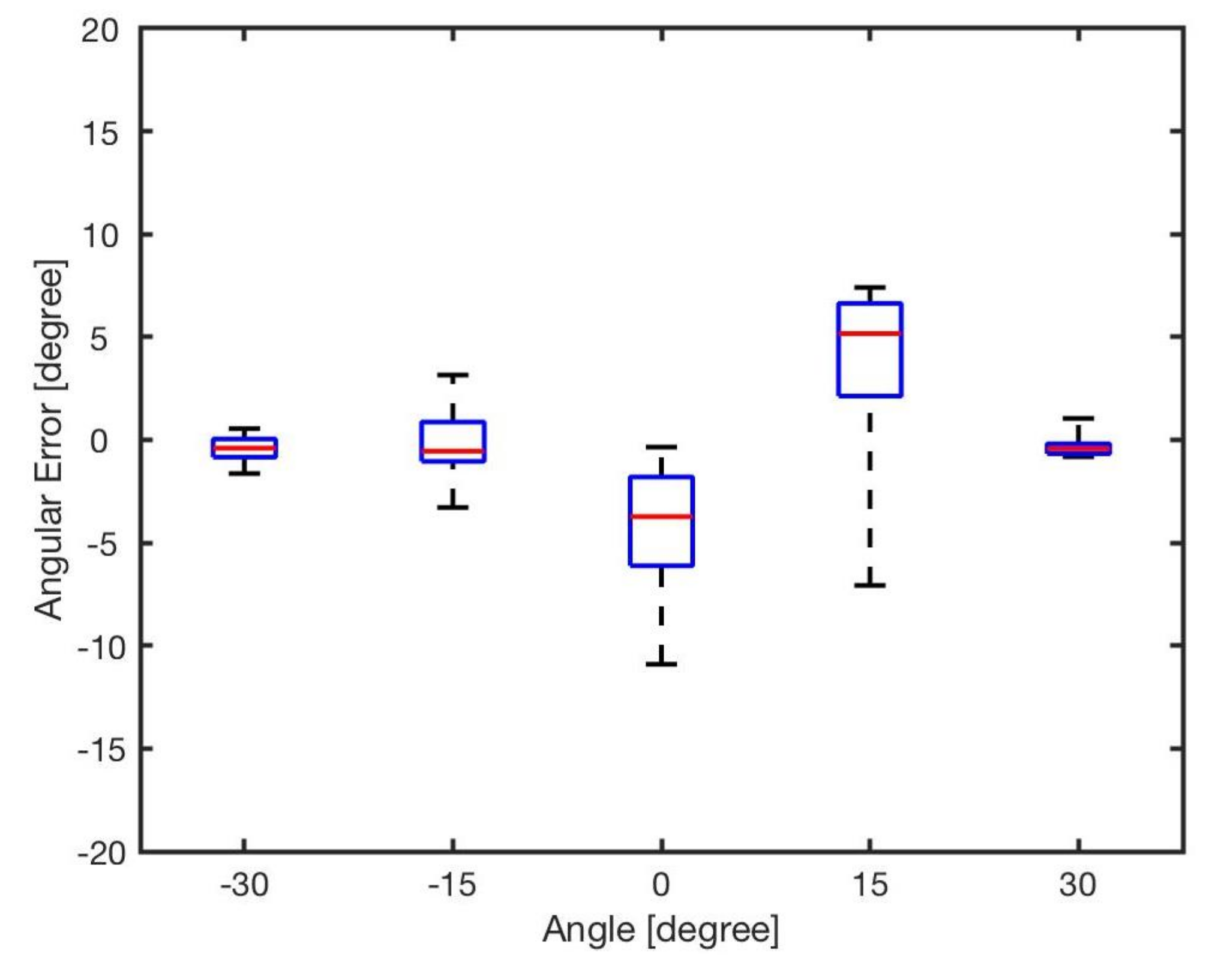
6.3. Redesign of Sensor Configuration
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ADC | Analog–digital converter |
| GA | Genetic algorithm |
| PSO | Particle swarm optimisation |
| ACO | Ant colony optimisation |
| GPS | Global Positioning System |
| I2C | Inter-integrated circuit |
| ICP | Iterative closest point |
| IMU | Inertial measurement unit |
| IR | Infrared |
| LiDAR | Light detecting and ranging |
| PRWS | Proportionate roulette wheel selection |
| RFID | Radio-frequency identification |
| SPI | Serial peripheral interface |
| UAV | Unmanned aerial vehicles |
| UWB | Ultra-wideband |
| WLAN | Wireless local area network |
References
- Grieve, B.D.; Duckett, T.; Collison, M.; Boyd, L.; West, J.; Yin, H.; Arvin, F.; Pearson, S. The challenges posed by global broadacre crops in delivering smart agri-robotic solutions: A fundamental rethink is required. Glob. Food Secur. 2019, 23, 116–124. [Google Scholar] [CrossRef]
- Albani, D.; IJsselmuiden, J.; Haken, R.; Trianni, V. Monitoring and mapping with robot swarms for agricultural applications. In Proceedings of the 4th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017; pp. 1–6. [Google Scholar]
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. Swarm Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef]
- Şahin, E. Swarm robotics: From sources of inspiration to domains of application. In International Workshop on Swarm Robotics; Springer: Berlin/Heidelberg, Germany, 2004; pp. 10–20. [Google Scholar]
- Schmickl, T.; Thenius, R.; Moeslinger, C.; Radspieler, G.; Kernbach, S.; Szymanski, M.; Crailsheim, K. Get in touch: Cooperative decision making based on robot-to-robot collisions. Auton. Agents Multi-Agent Syst. 2009, 18, 133–155. [Google Scholar] [CrossRef]
- Arvin, F.; Turgut, A.E.; Bellotto, N.; Yue, S. Comparison of different cue-based swarm aggregation strategies. In International Conference in Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2014; pp. 1–8. [Google Scholar]
- Arvin, F.; Samsudin, K.; Ramli, A.R. A short-range infrared communication for swarm mobile robots. In Proceedings of the 2009 International Conference on Signal Processing Systems, Singapore, 15–17 May 2009; pp. 454–458. [Google Scholar]
- Arvin, F.; Espinosa, J.; Bird, B.; West, A.; Watson, S.; Lennox, B. Mona: An affordable open-source mobile robot for education and research. J. Intell. Robot. Syst. 2019, 94, 761–775. [Google Scholar] [CrossRef]
- Kim, J.; Park, J.; Chung, W. Self-Diagnosis of Localization Status for Autonomous Mobile Robots. Sensors 2018, 18, 3168. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Yong, L.; Chen, Y.; Zhang, S.; Ge, L.; Wang, S.; Li, W. A rubber-tapping robot forest navigation and information collection system based on 2D LiDAR and a gyroscope. Sensors 2019, 19, 2136. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.H.; Song, J.B. Acceleration estimator for low-velocity and low-acceleration regions based on encoder position data. IEEE/ASME Trans. Mechatron. 2001, 6, 58–64. [Google Scholar]
- Zhang, H.; Zhang, Z.; Gao, N.; Xiao, Y.; Meng, Z.; Li, Z. Cost-Effective Wearable Indoor Localization and Motion Analysis via the Integration of UWB and IMU. Sensors 2020, 20, 344. [Google Scholar] [CrossRef] [PubMed]
- Krajník, T.; Nitsche, M.; Faigl, J.; Vaněk, P.; Saska, M.; Přeučil, L.; Duckett, T.; Mejail, M. A practical multirobot localization system. J. Intell. Robot. Syst. 2014, 76, 539–562. [Google Scholar] [CrossRef]
- Gutiérrez, A.; Campo, A.; Dorigo, M.; Amor, D.; Magdalena, L.; Monasterio-Huelin, F. An open localization and local communication embodied sensor. Sensors 2008, 8, 7545–7563. [Google Scholar] [CrossRef] [PubMed]
- Gorostiza, E.M.; Galilea, L.; Luis, J.; Meca Meca, F.J.; Salido Monzú, D.; Espinosa Zapata, F.; Pallarés Puerto, L. Infrared sensor system for mobile-robot positioning in intelligent spaces. Sensors 2011, 11, 5416–5438. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.J.; Yim, B.D.; Song, J.B. Mobile robot localization based on effective combination of vision and range sensors. Int. J. Control Autom. Syst. 2009, 7, 97–104. [Google Scholar] [CrossRef]
- Liu, Q.; Li, H.; Yu, Y.F.; Zhao, W.S.; Zhang, S. A Novel Finger-Controlled Passive RFID Tag Design for Human–Machine Interaction. Sensors 2019, 19, 5125. [Google Scholar] [CrossRef] [PubMed]
- Han, S.; Lim, H.; Lee, J. An efficient localization scheme for a differential-driving mobile robot based on RFID system. IEEE Trans. Ind. Electron. 2007, 54, 3362–3369. [Google Scholar] [CrossRef]
- Chen, H.; Wu, Z.; Zheng, R.; Zhang, S. Design of Autonomous Obstacle Avoidance Unmanned Boat System for Wetland Monitoring. J. Phys. Conf. Ser. 2020, 1486, 072033. [Google Scholar] [CrossRef]
- Qiang, L.; Heng, W.; Huican, L.; Shuqi, Q.; Nanxun, D.; Bing, L. Formation control of multi robot based on uwb distance measurement. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 2404–2408. [Google Scholar]
- Mazraani, R.; Saez, M.; Govoni, L.; Knobloch, D. Experimental results of a combined TDOA/TOF technique for UWB based localization systems. In Proceedings of the 2017 IEEE International Conference on Communications Workshops (ICC Workshops), Paris, France, 21–25 May 2017; pp. 1043–1048. [Google Scholar]
- Kietlinski-Zaleski, J.; Yamazato, T. TDoA UWB positioning with three receivers using known indoor features. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2011, 94, 964–971. [Google Scholar] [CrossRef]
- Dabove, P.; Di Pietra, V.; Piras, M.; Jabbar, A.A.; Kazim, S.A. Indoor positioning using Ultra-wide band (UWB) technologies: Positioning accuracies and sensors’ performances. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 175–184. [Google Scholar]
- Mimoune, K.M.; Ahriz, I.; Guillory, J. Evaluation and Improvement of Localization Algorithms Based on UWB Pozyx System. In Proceedings of the 2019 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 19–21 September 2019; pp. 1–5. [Google Scholar]
- Mainetti, L.; Patrono, L.; Sergi, I. A survey on indoor positioning systems. In Proceedings of the 2014 22nd International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 17–19 September 2014; pp. 111–120. [Google Scholar]
- Qi, J.; Liu, G.P. A robust high-accuracy ultrasound indoor positioning system based on a wireless sensor network. Sensors 2017, 17, 2554. [Google Scholar] [CrossRef] [PubMed]
- Priyantha, N.B. The Cricket Indoor Location System. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2005. [Google Scholar]
- Fukuju, Y.; Minami, M.; Morikawa, H.; Aoyama, T. DOLPHIN: An Autonomous Indoor Positioning System in Ubiquitous Computing Environment. WSTFES 2003, 3, 53. [Google Scholar]
- Krajník, T.; Faigl, J.; Vonásek, V.; Košnar, K.; Kulich, M.; Přeučil, L. Simple yet stable bearing-only navigation. J. Field Robot. 2010, 27, 511–533. [Google Scholar] [CrossRef]
- Häne, C.; Heng, L.; Lee, G.H.; Fraundorfer, F.; Furgale, P.; Sattler, T.; Pollefeys, M. 3D visual perception for self-driving cars using a multi-camera system: Calibration, mapping, localization, and obstacle detection. Image Vis. Comput. 2017, 68, 14–27. [Google Scholar] [CrossRef]
- Lee, G.H.; Li, B.; Pollefeys, M.; Fraundorfer, F. Minimal solutions for pose estimation of a multi-camera system. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2016; pp. 521–538. [Google Scholar]
- Marinho, L.B.; Almeida, J.S.; Souza, J.W.M.; Albuquerque, V.H.C.; Rebouças Filho, P.P. A novel mobile robot localization approach based on topological maps using classification with reject option in omnidirectional images. Expert Syst. Appl. 2017, 72, 1–17. [Google Scholar] [CrossRef]
- Baek, M.; Jeong, D.; Choi, D.; Lee, S. Vehicle Trajectory Prediction and Collision Warning via Fusion of Multisensors and Wireless Vehicular Communications. Sensors 2020, 20, 288. [Google Scholar] [CrossRef] [PubMed]
- Mueller, A.; Himmelsbach, M.; Luettel, T.; Hundelshausen, F.v.; Wuensche, H.J. GIS-based topological robot localization through LIDAR crossroad detection. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 2001–2008. [Google Scholar]
- Kumar, G.; Patil, A.; Patil, R.; Park, S.; Chai, Y. A LiDAR and IMU integrated indoor navigation system for UAVs and its application in real-time pipeline classification. Sensors 2017, 17, 1268. [Google Scholar] [CrossRef] [PubMed]
- Patruno, C.; Colella, R.; Nitti, M.; Renò, V.; Mosca, N.; Stella, E. A Vision-Based Odometer for Localization of Omnidirectional Indoor Robots. Sensors 2020, 20, 875. [Google Scholar] [CrossRef] [PubMed]
- Mao, L.; Chen, J.; Li, Z.; Zhang, D. Relative localization method of multiple micro robots based on simple sensors. Int. J. Adv. Robot. Syst. 2013, 10, 128. [Google Scholar] [CrossRef]
- Arvin, F.; Samsudin, K.; Ramli, A.R. Development of a miniature robot for swarm robotic application. Int. J. Comput. Electr. Eng. 2009, 1, 436–442. [Google Scholar] [CrossRef]
- Pugh, J.; Martinoli, A. Relative localization and communication module for small-scale multi-robot systems. In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 188–193. [Google Scholar]
- Arvin, F.; Samsudin, K.; Ramli, R. Development of IR-based short-range communication techniques for swarm robot applications. Adv. Electr. Comput. Eng. 2010, 10, 61–68. [Google Scholar] [CrossRef]
- Arvin, F.; Murray, J.; Zhang, C.; Yue, S. Colias: An autonomous micro robot for swarm robotic applications. Int. J. Adv. Robot. Syst. 2014, 11, 113. [Google Scholar] [CrossRef]
- Hu, C.; Fu, Q.; Yue, S. Colias IV: The Affordable Micro Robot Platform with Bio-inspired Vision. In Towards Autonomous Robotic Systems; Springer: Berlin/Heidelberg, Germany, 2018; pp. 197–208. [Google Scholar]
- Mondada, F.; Bonani, M.; Raemy, X.; Pugh, J.; Cianci, C.; Klaptocz, A.; Magnenat, S.; Zufferey, J.C.; Floreano, D.; Martinoli, A. The e-puck, a robot designed for education in engineering. In Proceedings of the 9th Conference on Autonomous Robot Systems and Competitions, Castelo Branco, Portugal, 7 May 2009; IPCB: Instituto Politécnico de Castelo Branco: Castelo Branco, Portugal, 2009; Volume 1, pp. 59–65. [Google Scholar]
- Pickem, D.; Lee, M.; Egerstedt, M. The GRITSBot in its natural habitat-a multi-robot testbed. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4062–4067. [Google Scholar]
- Rezeck, P.A.; Azpurua, H.; Chaimowicz, L. HeRo: An open platform for robotics research and education. In Proceedings of the 2017 Latin American Robotics Symposium (LARS) and 2017 Brazilian Symposium on Robotics (SBR), Curitiba, Brazil, 9–11 November 2017; pp. 1–6. [Google Scholar]
- Kernbach, S.; Thenius, R.; Kernbach, O.; Schmickl, T. Re-embodiment of honeybee aggregation behavior in an artificial micro-robotic system. Adapt. Behav. 2009, 17, 237–259. [Google Scholar] [CrossRef]
- Rubenstein, M.; Ahler, C.; Nagpal, R. Kilobot: A low cost scalable robot system for collective behaviors. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3293–3298. [Google Scholar]
- Turgut, A.E.; Gokce, F.; Celikkanat, H.; Bayindir, L.; Sahin, E. Kobot: A Mobile Robot Designed Specifically for Swarm Robotics Research; Middle East Technical University, Department of Computer Engineering: Ankara, Turkey, 2007; Volume 5. [Google Scholar]
- Doyle, M.J.; Xu, X.; Gu, Y.; Perez-Diaz, F.; Parrott, C.; Groß, R. Modular hydraulic propulsion: A robot that moves by routing fluid through itself. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5189–5196. [Google Scholar]
- McLurkin, J.; Rykowski, J.; John, M.; Kaseman, Q.; Lynch, A.J. Using multi-robot systems for engineering education: Teaching and outreach with large numbers of an advanced, low-cost robot. IEEE Trans. Educ. 2012, 56, 24–33. [Google Scholar] [CrossRef]
- Mondada, F.; Pettinaro, G.C.; Guignard, A.; Kwee, I.W.; Floreano, D.; Deneubourg, J.L.; Nolfi, S.; Gambardella, L.M.; Dorigo, M. SWARM-BOT: A new distributed robotic concept. Auton. Robot. 2004, 17, 193–221. [Google Scholar] [CrossRef]
- Kettler, A.; Szymanski, M.; Liedke, J.; Wörn, H. Introducing wanda-a new robot for research, education, and arts. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4181–4186. [Google Scholar]
- Su, H.; Yang, C.; Mdeihly, H.; Rizzo, A.; Ferrigno, G.; De Momi, E. Neural Network Enhanced Robot Tool Identification and Calibration for Bilateral Teleoperation. IEEE Access 2019, 7, 122041–122051. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Zou, Y.; Luo, D. A modified ant colony algorithm used for multi-robot odor source localization. In International Conference on Intelligent Computing; Springer: Berlin/Heidelberg, Germany, 2008; pp. 502–509. [Google Scholar]
- Laureano, M.A.P.; Tonidandel, F. Analysis of the PSO Parameters for a Robots Positioning System in SSL. In Robot World Cup; Springer: Berlin/Heidelberg, Germany, 2019; pp. 126–139. [Google Scholar]
- Su, H.; Qi, W.; Yang, C.; Sandoval, J.; Ferrigno, G.; De Momi, E. Deep neural network approach in robot tool dynamics identification for bilateral teleoperation. IEEE Robot. Autom. Lett. 2020, 5, 2943–2949. [Google Scholar] [CrossRef]
- Jiang, G.; Luo, M.; Bai, K.; Chen, S. A precise positioning method for a puncture robot based on a PSO-optimized BP neural network algorithm. Appl. Sci. 2017, 7, 969. [Google Scholar] [CrossRef]
- Kwok, D.; Sheng, F. Genetic algorithm and simulated annealing for optimal robot arm PID control. In Proceedings of the First IEEE Conference on Evolutionary Computation. IEEE World Congress on Computational Intelligence, Orlando, FL, USA, 27–29 June 1994; pp. 707–713. [Google Scholar]
- West, C.; Montazeri, A.; Monk, S.D.; Taylor, C.J. A genetic algorithm approach for parameter optimization of a 7DOF robotic manipulator. IFAC-PapersOnLine 2016, 49, 1261–1266. [Google Scholar] [CrossRef]
- Moreno, L.; Armingol, J.M.; Garrido, S.; De La Escalera, A.; Salichs, M.A. A genetic algorithm for mobile robot localization using ultrasonic sensors. J. Intell. Robot. Syst. 2002, 34, 135–154. [Google Scholar] [CrossRef]
- Elhoseny, M.; Tharwat, A.; Hassanien, A.E. Bezier curve based path planning in a dynamic field using modified genetic algorithm. J. Comput. Sci. 2018, 25, 339–350. [Google Scholar] [CrossRef]
- Samsudin, K.; Ahmad, F.A.; Mashohor, S. A highly interpretable fuzzy rule base using ordinal structure for obstacle avoidance of mobile robot. Appl. Soft Comput. 2011, 11, 1631–1637. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Wen, J.; Yang, H.; Tong, X.; Li, K.; Wang, S.; Li, Y. Optimization investigation on configuration parameters of serrated fin in plate-fin heat exchanger using genetic algorithm. Int. J. Therm. Sci. 2016, 101, 116–125. [Google Scholar] [CrossRef]
- Gasparri, A.; Panzieri, S.; Pascucci, F. A spatially structured genetic algorithm for multi-robot localization. Intell. Serv. Robot. 2009, 2, 31–40. [Google Scholar] [CrossRef]
- Arvin, F.; Turgut, A.E.; Bazyari, F.; Arikan, K.B.; Bellotto, N.; Yue, S. Cue-based aggregation with a mobile robot swarm: A novel fuzzy-based method. Adapt. Behav. 2014, 22, 189–206. [Google Scholar] [CrossRef]
- Kumar, M.; Husian, M.; Upreti, N.; Gupta, D. Genetic algorithm: Review and application. Int. J. Inf. Technol. Knowl. Manag. 2010, 2, 451–454. [Google Scholar] [CrossRef]
- Thierens, D.; Goldberg, D. Convergence models of genetic algorithm selection schemes. In International Conference on Parallel Problem Solving from Nature; Springer: Berlin/Heidelberg, Germany, 1994; pp. 119–129. [Google Scholar]
- Thierens, D.; Goldberg, D. Elitist recombination: An integrated selection recombination GA. In Proceedings of the First IEEE Conference on Evolutionary Computation. IEEE World Congress on Computational Intelligence, Orlando, FL, USA, 27–29 June 1994; pp. 508–512. [Google Scholar]
- Skeik, O.; Hu, J.; Arvin, F.; Lanzon, A. Cooperative control of integrator negative imaginary systems with application to rendezvous multiple mobile robots. In Proceedings of the 12th International Workshop on Robot Motion and Control (RoMoCo), Poznań, Poland, 8–10 July 2019; pp. 15–20. [Google Scholar]
- Hu, J.; Bhowmick, P.; Arvin, F.; Lanzon, A.; Lennox, B. Cooperative Control of Heterogeneous Connected Vehicle Platoons: An Adaptive Leader-Following Approach. IEEE Robot. Autom. Lett. 2020, 5, 977–984. [Google Scholar] [CrossRef]
- Arvin, F.; Watson, S.; Turgut, A.E.; Espinosa, J.; Krajník, T.; Lennox, B. Perpetual robot swarm: Long-term autonomy of mobile robots using on-the-fly inductive charging. J. Intell. Robot. Syst. 2018, 92, 395–412. [Google Scholar] [CrossRef]
- Raoufi, M.; Turgut, A.E.; Arvin, F. Self-organized Collective Motion with a Simulated Real Robot Swarm. In Lecture Notes in Artificial Intelligence; Springer: Cham, Switzerland, 2019; pp. 263–274. [Google Scholar]
- Jeong, D.; Lee, K. Distributed communication and localization algorithms for homogeneous robotic swarm. In Distributed Autonomous Robotic Systems; Springer: Berlin/Heidelberg, Germany, 2016; pp. 405–418. [Google Scholar]
- Boucouvalas, A.; Peppas, K. Link Layer Protocols for Short-Range IR Communications. In Optical Wireless Communications; Springer: Berlin/Heidelberg, Germany, 2016; pp. 463–483. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot | Perception/Communication | Battery | Motion | MCU/MPU | Ref |
|---|---|---|---|---|---|
| Colias | IR | LiPo, 3.7 V, 600 mAh | Wheel | ATmega168 | [41] |
| Colias-IV | IR, Bluetooth, RF | LiPo, 3.7 V, 400 mAh | Wheel | ARM Cortex M4 | [42] |
| E-puck | IR, Bluetooth | 5 Wh | Wheel | dsPic30 | [43] |
| GRITSBot | IR, RF | LiPo, 3.7 V, 150 mAh | Wheel | ATmega328 | [44] |
| HeRo | IR, WiFi | LiPo 3.7 V, 1 Ah | Wheel | ESP8266 | [45] |
| Jasmine | IR | LiPo, 2 h autonomy | Wheel | ATmega168 | [46] |
| Kilobot | IR | LiPo, 3.4 V, 160 mAh | Vibration | ATmega328 | [47] |
| Kobot | IR, ZigBee | LiPo, 7 Wh | Wheel | PIC16F877A | [48] |
| MHP | IR | Alkaline, 9 V | Micropump | ARM Cortex M4 | [49] |
| Mona | IR, WiFi | 3.7 V, 250 mAh | Wheel | ATmega2560 | [8] |
| r-one | IR, ZigBee | 4 h autonomy | Wheel | TI LM3S8962 | [50] |
| S-Bot | IR, WiFi | LiIon 10 Wh | Treels | Intel XScale | [51] |
| Wanda | IR, ZigBee | LiPo 3.4 V, 250 mAh | Wheel | TI LM3S1960 | [52] |
| Parameter | Population Size | Chromosome Length | Generation Size | Crossover Rate | Mutation Rate |
|---|---|---|---|---|---|
| Value | 100 | 100 | 50 | 0.6 | 0.01 |
| Parameters | Description | Value/Range |
|---|---|---|
| Real angular position of neighbouring robot | ||
| Estimated bearing of neighbouring robot | ||
| Angular distance between the IR sensors on PCB | ||
| l | Distance between two robots | cm |
| Weights for sensors’ angular position | ||
| Weights for received IR intensity |
| Robot Angle, | 0 | 15 | 30 | −15 | −30 |
|---|---|---|---|---|---|
| Average error, | −6.5246 | 5.7147 | −14.2269 | −10.4157 | 5.9967 |
| Weight Variable | (IR) | (IR) | (IR) | (IR) | (IR) |
|---|---|---|---|---|---|
| Value | 1.0635 | 0.9971 | 0.002 | 0.0039 | 1.6833 |
| Robot Angle | 0 | 15 | 30 | −15 | −30 |
|---|---|---|---|---|---|
| Average error | −3.4261 | 9.2025 | −3.4261 | −5.1070 | 7.3875 |
| Weight | (IR) | (IR) | (IR) | (IR) | (IR) |
|---|---|---|---|---|---|
| Value | 0.0156 | 1.3529 | 1.8690 | 0.1408 | 1.7361 |
| Weight | (IR) | (IR) | (IR) | (IR) | (IR) |
|---|---|---|---|---|---|
| Value | 0.2717 | 0.3148 | 0.9599 | 1.3060 | 1.0440 |
| Angular Displacement | (IR) | (IR) | (IR) | (IR) | (IR) |
|---|---|---|---|---|---|
| Value | 0 | 30.834 | 3.609 | 27.54 | 19.8 |
| Robot Angle | 0 | 15 | 30 | −15 | −30 |
|---|---|---|---|---|---|
| Average error | −4.2877 | 3.8144 | −0.3472 | −0.3272 | −0.4096 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; West, C.; Lennox, B.; Arvin, F. Local Bearing Estimation for a Swarm of Low-Cost Miniature Robots. Sensors 2020, 20, 3308. https://doi.org/10.3390/s20113308
Liu Z, West C, Lennox B, Arvin F. Local Bearing Estimation for a Swarm of Low-Cost Miniature Robots. Sensors. 2020; 20(11):3308. https://doi.org/10.3390/s20113308
Chicago/Turabian StyleLiu, Zheyu, Craig West, Barry Lennox, and Farshad Arvin. 2020. "Local Bearing Estimation for a Swarm of Low-Cost Miniature Robots" Sensors 20, no. 11: 3308. https://doi.org/10.3390/s20113308
APA StyleLiu, Z., West, C., Lennox, B., & Arvin, F. (2020). Local Bearing Estimation for a Swarm of Low-Cost Miniature Robots. Sensors, 20(11), 3308. https://doi.org/10.3390/s20113308