1. Introduction
In recent years, precision point positioning (PPP) technology has been widely studied, and the products of PPP are applied in the various domains of timing, geodesy, geophysics, seismology, atmology, and so on. By using precise orbits and clocks in the posterior mode, PPP can provide accurate station coordinates, clock errors, tropospheric delay, and ionospheric delay. PPP is becoming more and more complete, and the main interest has turned to real-time PPP [
1,
2,
3,
4].
A receiver or smartphone can be utilized to implement real-time PPP with precise predicted orbits and real-time estimated clocks to achieve centimeter-level real-time positioning services [
5]. In this way, the precise orbits and clocks must be broadcast to the receiver in real-time. Thereby, the real-time transmission of precise orbits and clocks is a necessary step to guarantee the real-time PPP. In particular, the lightweight performance on the precise orbits broadcast will directly affect the transmission load and the acquisition delay. Moreover, for real-time services of precise orbits, the continuity and reliability will be the determining factors on the actual performance of real-time PPP. At present, the real-time services of precise orbits and clocks are implemented with the data stream defined by the radio technical commission for maritime services standards 104,03.2 (RTCM) [
6].
On one hand, RTCM provides a real-time mode of broadcasting precise clocks, and the broadcast message is the clock corrections. The clock corrections are the differences between the clock errors of navigation ephemeris from the navigation messages and the precise clock errors. Due to the fast change of a satellite clock, the characteristic of clock corrections is different from that of orbit corrections. Consequently, clock corrections are difficult to predict with a precision of sub-nanosecond level [
7,
8,
9,
10]. Therefore, the clock corrections are estimated in real-time and broadcast at high frequency to support real-time precise positioning services [
11].
On the other hand, RTCM provides a real-time mode of broadcasting precise orbits, and the broadcast message is the orbit corrections and its change rate. The orbit corrections are the differences between the calculated orbits from the navigation ephemeris and the precise orbits. The navigation ephemeris is decoded from the navigation messages, and the orbit accuracy provided by the GPS navigation ephemeris in the navigation messages is about 1 m [
12,
13]. The International GNSS Service (IGS) provides ultra-rapid predicted orbits with an accuracy of 5 cm. The ultra-rapid orbits are updated every 6 h in advance [
14,
15]. The ultra-rapid orbits can be used as a real-time precise orbits for real-time PPP [
16]. The orbit corrections are generated from the navigation ephemeris and the ultra-rapid orbits. The correction rate is generally treated as 0 by default. Then, the orbit corrections are transmitted according to the RTCM with the update period of 60 s [
17]. Moreover, IGS has established the real-time services (RTS) to provide real-time data streams of orbit and clock corrections, which substantially improve the availability and precision of real-time PPP. Fortunately, with the help of the Multi-GNSS Experiment (MGEX), IGS and Bundesamt Kartographieund Geodesie (BKG) are continuing to upgrade the real-time services of orbits and clocks to augment real-time PPP.
As an alternative but improved approach, the 18-parameter ephemeris may be beneficial to enhance the performance of broadcasting the precise orbits relative to the RTCM to serve real-time PPP. In order to broadcast the navigation ephemeris of geosynchronous Earth orbit (GEO), Du et al. [
18] investigated the performance of 18-parameter ephemeris, and solved the singular problem caused by the GEO inclination angle close to 0. Those works demonstrate the promising potential of the 18-parameter ephemeris. In contrast to the existing research of navigation ephemeris application, this study proposes a GPS service mode in which the generated 18-parameter ephemeris is directly applied to real-time PPP for the receiver and smartphone, and quantitatively investigates the difference in the PPP results produced by this service mode of broadcasting precise orbits.
There are many differences in terms of the implemented background and the applied object. The traditional GPS navigation ephemeris is mainly used to broadcast satellite orbits with a precision of about 1 m, and serve standard point positioning with meter-level precision and precise relative positioning. Specifically, the accuracy of navigation ephemeris is variant from different GNSS [
19]. With the progress of GNSS construction, Galileo has brought more accurate navigation ephemeris, whose accuracy of broadcast orbits is almost three times relative to that of GPS. Galileo’s advancement in navigation ephemeris provides inspiring support to the real-time PPP services. Using the broadcast orbits and clocks from Galileo navigation ephemeris, real-time PPP can reach 7 cm in horizontal and 10 cm in vertical accuracy. This result exhibits a promising reference for GPS [
20]. On this basis, a new GPS service is proposed to generate the ephemeris to broadcast ultra-rapid precise orbits with a precision of about 5 cm, and is supplied for the centimeter-level real-time PPP on the receiver and smartphone. For the first time in GPS, this paper provides the difference in the PPP results between the precise orbits and the calculated orbits with the generated ephemeris parameters, and the deviations resulted from the mode of broadcasting precise orbits with the generated ephemeris were carefully evaluated and analyzed in terms of orbit errors and PPP offsets. Consequently, some helpful findings are supplied to real-time PPP.
Unlike the classic mode provided by RTCM to broadcast precise orbits, this study suggests a smart mode of directly broadcasting precise orbits with the generated ephemeris parameters, which reduces the number of broadcast parameters and transmission burden, and improves the convenience, continuity, and reliability of real-time service of precise orbits. The classic RTCM mode broadcasts the corrections and its rate of the precise orbits with respect to the navigation ephemeris. Unfortunately, when the receiver used the Internet to receive the orbit correction data streams, continuous success is hardly guaranteed, since it is difficult to ensure that the transmission network is always normal [
10]. Occasionally, when the network link or data stream is suspended and reconnected, the missing orbit correction data during the abnormal period brings about the interruption and discontinuity of real-time services of precise orbits. In addition, the validity period of the RTCM orbit corrections is as short as 60 s. Accuracy of the predicted orbits after the validity period are hardly guaranteed with the previous correction data. If the correction data stream is suspended for more than 5 min, precise orbit services become unavailable [
21].
Fortunately, the aforementioned disadvantages would be mitigated by the smart mode of broadcasting precise orbits with the 18-parameter ephemeris. By taking the advantages of broadcast ephemeris to realize precise orbits transmission in real-time services, the contributions are resulted in improving the performances of lightweight, convenience, continuity, and reliability. In fact, all receivers and smartphones already employ the navigation ephemeris from the GPS signal, which provide the functions of receiving, decoding, and calculating navigation ephemeris. If the real-time precise orbits are broadcast by the same format of navigation ephemeris, the receiver can use the precise ephemeris to carry out the real-time precise positioning application without additional changes [
22]. The broadcast ephemeris requires only 18 parameters within the 2 h validity period, which greatly reduces the number of RTCM orbit correction parameters during the same period. In addition, a set of broadcast ephemeris can cover precise orbits within the validity period of 2 h at a time, which provides continuous and accurate satellite positions, and helps to avoid the problem of the interruption of precise orbit services caused by orbit correction data stream failures or absences.
The rest of this paper is organized as follows. First, a method of generating broadcast ephemeris parameters is formed. By explaining the content of the 18-parameter ephemeris, the observation model and estimation model are established to generate the broadcast ephemeris parameters. Second, the performance of the 18-parameter ephemeris broadcasting precise orbits and its improvement over the traditional 16-parameter ephemeris are studied. The ephemeris parameters are generated from the GPS precise orbits. With the generated ephemeris, the satellite orbits are calculated to obtain the offsets relative to the original precise orbits. By investigating the statistical results of orbit offsets, the tests and analysis are conducted in terms of the fitting accuracy during the validity period, the predicted accuracy after the validity period, and the stability of ephemeris parameters generation. Finally, PPP tests are carried out with the generated 18-parameter ephemeris. The results of PPP with the calculated orbits from the 18-parameter ephemeris during the validity period are compared with the results of PPP with the precise orbits. Meantime, the results of PPP with the predicted orbits from the 18-parameter ephemeris after the validity period are compared with the results of PPP with the precise orbits. Then, the feasibility of the 18-parameter ephemeris broadcasting precise orbits for real-time PPP is verified.
It should be mentioned that the 18-parameter ephemeris and 16-parameter ephemeris are suitable for medium earth orbit (MEO) satellites. All GPS satellites use MEO. In this paper, GPS precise orbits and observation data were adopted by the tests of generating ephemeris parameters to broadcast precise orbits and the PPP tests with the generated ephemeris. The numerical results are only applicable to GPS, while the relevant testing conclusions can also be taken as a reference for other GNSS. Due to the space limitation, the broadcast of real-time precise orbits from others including GEO and inclined geosynchronous orbit (IGSO) can be planned and conducted in the future.
3. Test Description
In order to evaluate the accuracy of the generated ephemeris broadcasting precise orbits and the influence on the precision of PPP with the generated ephemeris [
19], simulation tests were designed in this section. The experimental results were obtained from real GPS observation data and the actual precise orbits used to simulate the real-time processing. The actual precise orbits from IGS products were processed as the generated ephemeris parameters. According to the real precise orbits, a comparison test was arranged to assess the fitting and predicting accuracies of the generated ephemeris. Furthermore, using the generated ephemeris to provide the real-time services of precise orbits, PPP experiments were carried out. The real GPS observation data were tested by the PPP with the generated ephemeris, and the precision of PPP with the calculated orbits by the generated ephemeris is demonstrated. The differences in the PPP results between the generated 18-parameter ephemeris, the generated 16-parameter ephemeris, and the precise orbits were compared, and the deviations that resulted from the generated ephemeris broadcasting the precise orbits were supplied. In practical application, the ultra-rapid precise predicted orbits provided by IGS can be used in generating ephemeris parameters to broadcast the precise orbits and achieve real-time services of PPP.
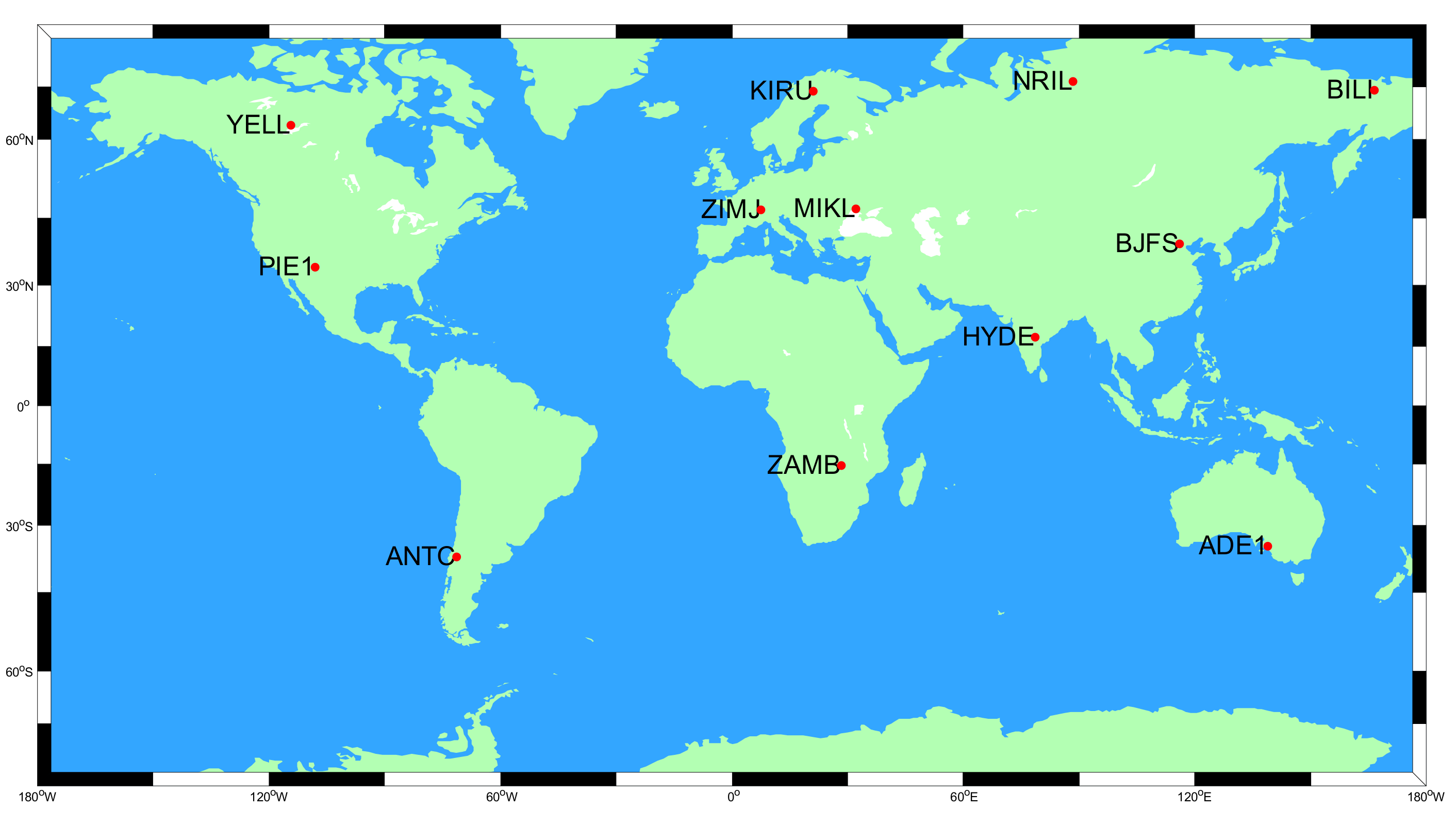
In the tests, the 16-parameter ephemeris and 18-parameter ephemeris were adopted to broadcast precise orbits, respectively. The valid periods of ephemeris were set to 2 h and 3 h. Specifically, the GPS constellations and arc segments covered as many as possible. Precise orbits of all GPS satellites over two days provided by IGS on 5–6 July 2017 were employed to generate the ephemeris parameters for broadcasting. In the PPP tests, the dual-frequency data were collected from 12 IGS stations globally distributed, as shown in
Figure 1. Particularly, PPP tests utilize conventional ionospheric combinations, precise clock products, and orbits including the precise orbits, the calculated orbits from the generated ephemeris within the validity period, and the predicted orbits of the generated ephemeris after the validity period, respectively.
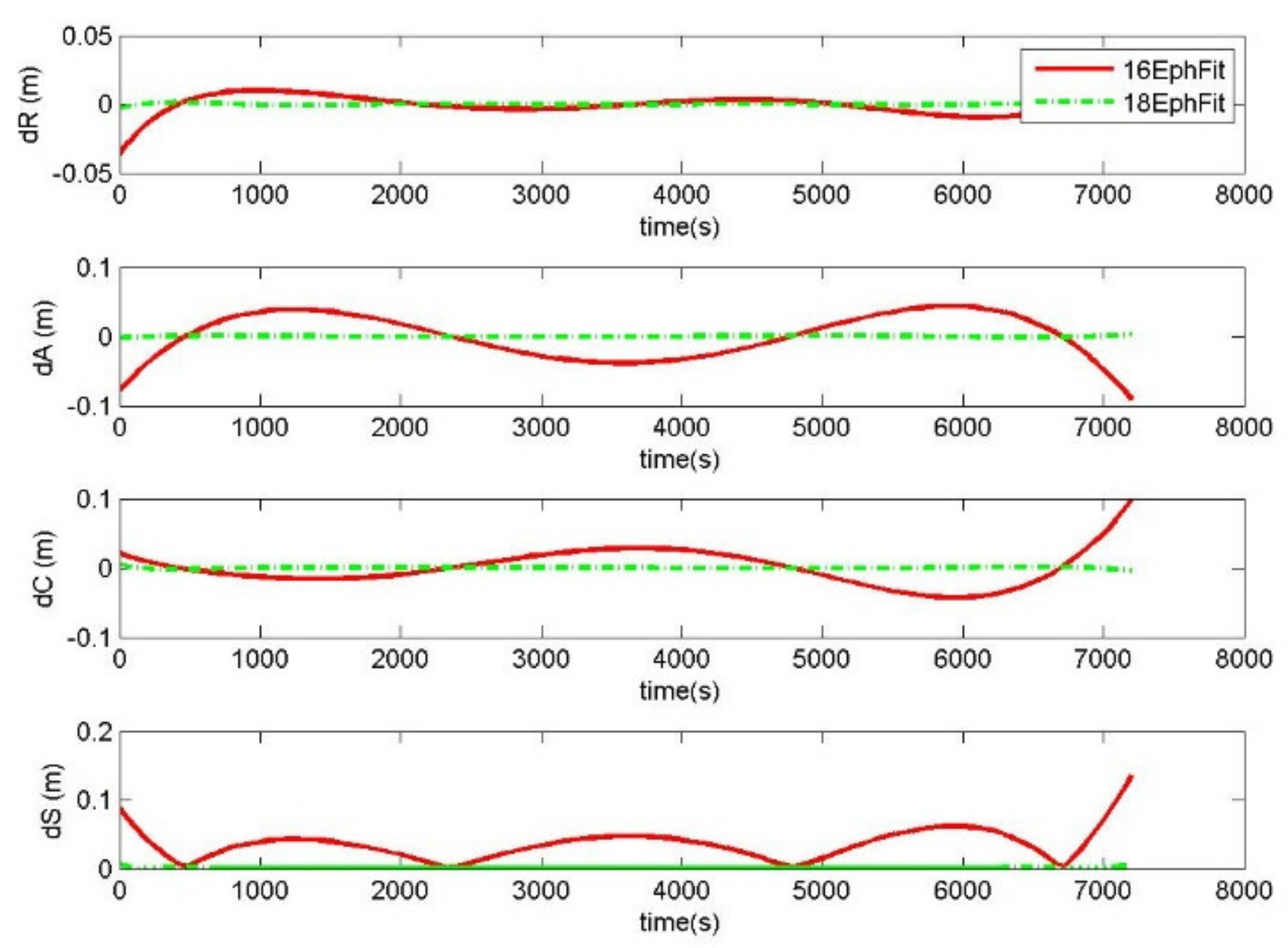
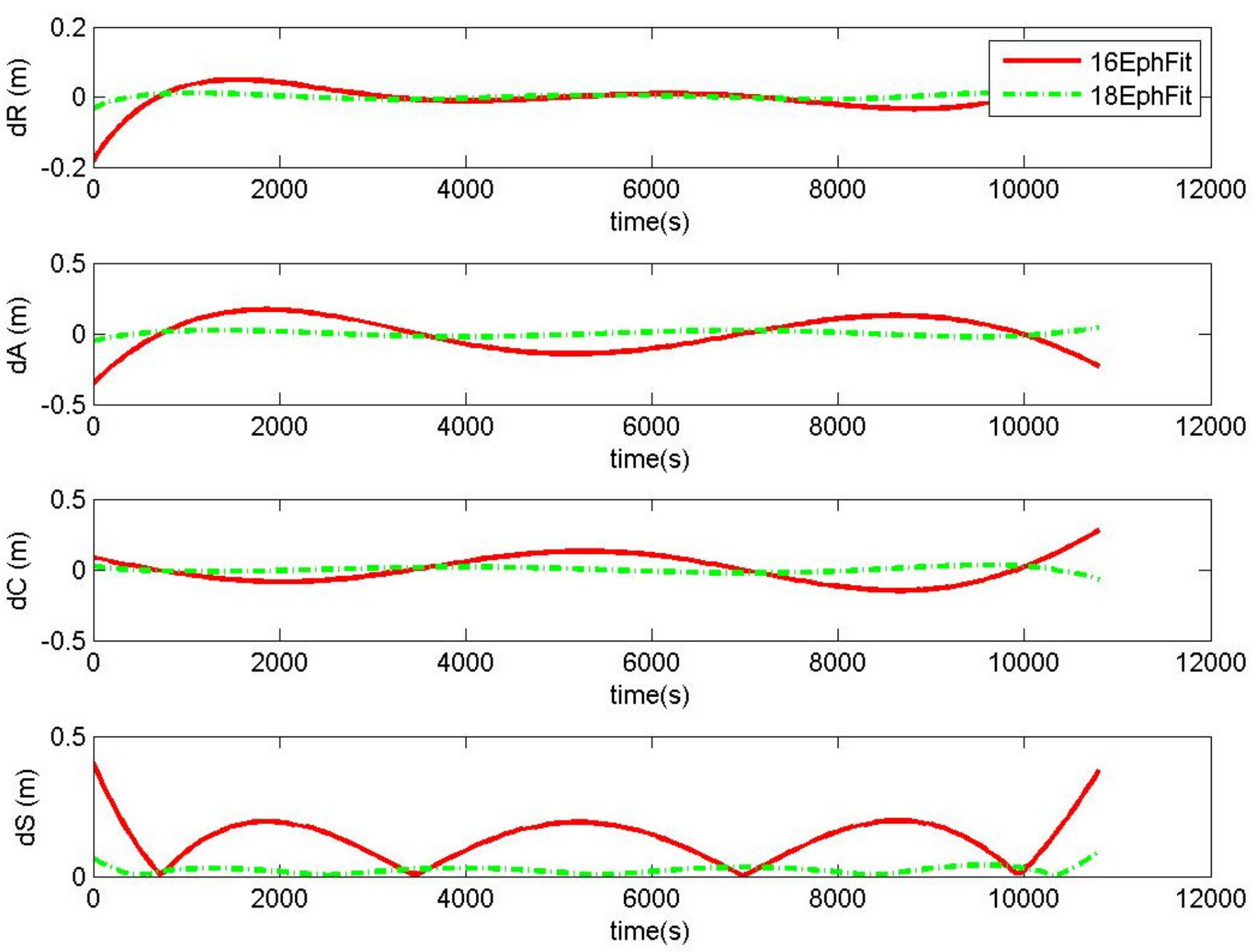
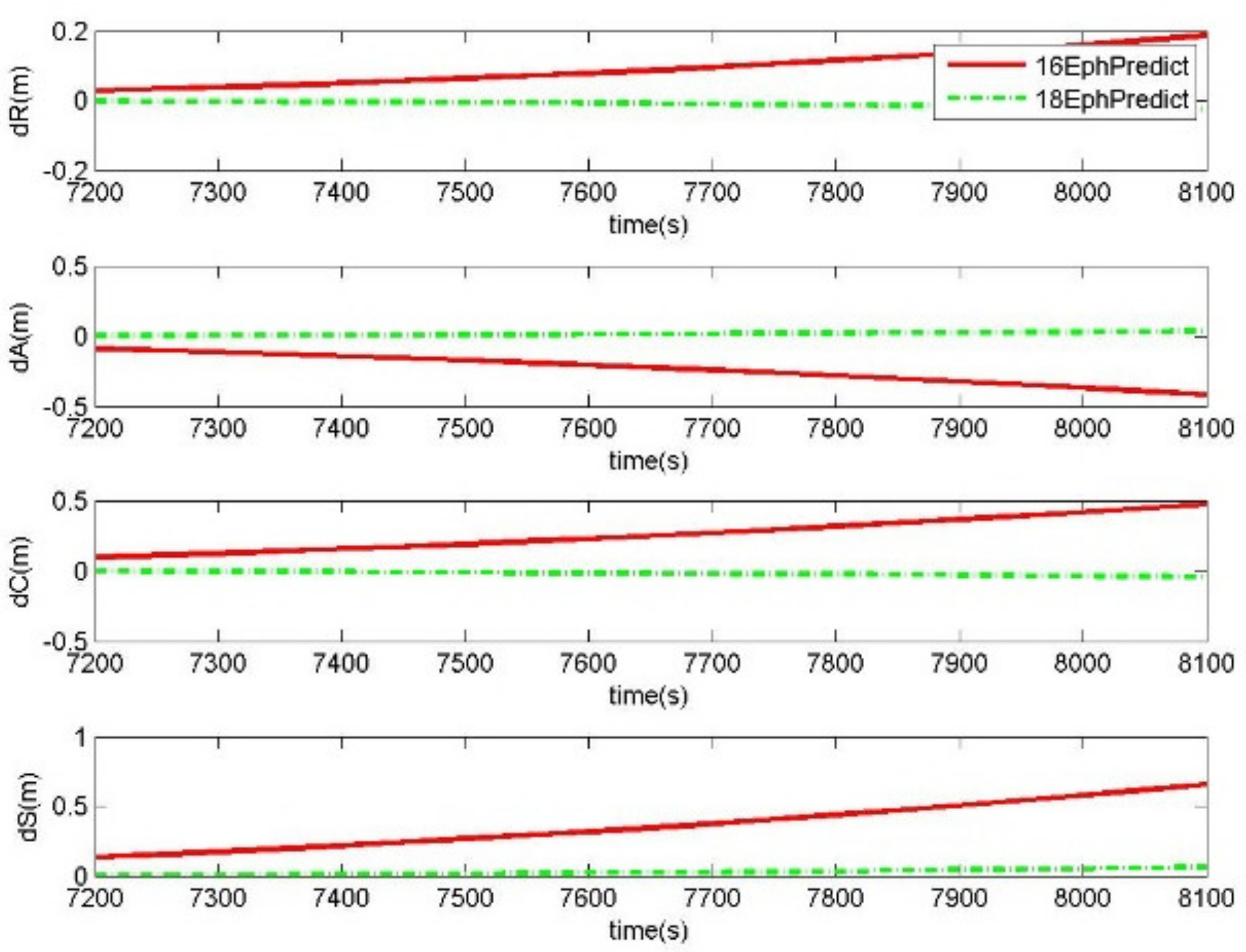
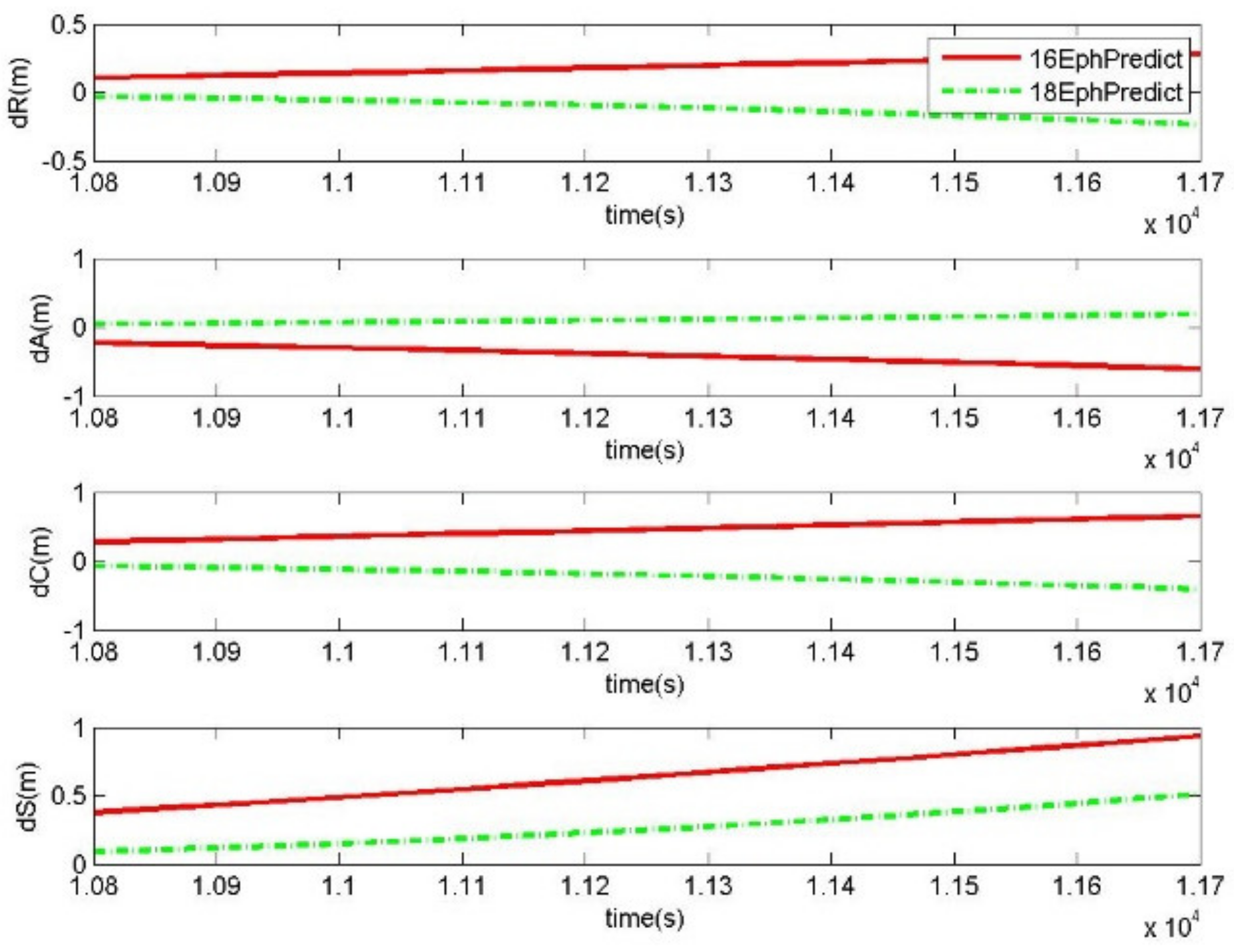
The simulation tests were designed to assess the accuracy of the generated ephemeris broadcasting precise orbits. The testing periods covered the inner and outer periods of the ephemeris validity. On one hand, the tests during the validity period were designed to assess the accuracy of ephemeris fitting precise orbits, the stability of generating ephemeris parameters from precise orbits, and the influence of different validity periods on fitting accuracy. On the other hand, the tests exceeding the validity period were planned to assess the prediction accuracy of the ephemeris, the prediction stability, and the influence of different validity periods on the prediction accuracy. The radial, along-track, and cross-track offsets (RAC) were adopted to evaluate the differences between the precise orbits and the calculated orbits by the generated ephemeris.
The PPP tests were designed to assess the performance of the generated ephemeris on precise point positioning. During the ephemeris validity period, the PPP tests were employed to assess the offsets between the results of PPP with the precise orbits and that of the calculated orbits from the generated ephemeris, and the positioning errors deduced from the results of PPP with the calculated orbits relative to the known position. In the same way, over the validity period, PPP tests were arranged to assess the offsets between the results of PPP with the precise orbits and that of the predicted orbits from the generated ephemeris, and the positioning errors. The accuracy and convergence of PPP depend on many factors such as the accuracies of orbit and clock, and the quality of the observation data. This study mainly focused on the difference between PPP with the generated ephemeris and PPP with the precise orbits, and the offsets because of the generated ephemeris replacing the precise orbits. Therefore, the impact of the generated ephemeris broadcasting precise orbits on PPP performance was carefully validated in this paper.
5. Conclusions
Precise point positioning (PPP) has been developed into real-time services. For real-time PPP with a receiver or smartphone, the convenient, continuous, and reliable acquisition of precise orbits is critical to ensure stable PPP services. RTCM provides a mode of broadcasting orbit corrections to supply the real-time services of precise orbits, but this mode finds it difficult to overcome the continuity and reliability degradation caused by the loss of orbit corrections due to the occasional communication failure, and a large volume of data needs to be broadcast. In order to overcome the above problems of RTCM mode, the navigation ephemeris was generated as an alternative and improved mode to broadcast the precise orbits with centimeter-level precision in real-time. Although navigation ephemeris has been adopted for broadcasting satellite orbits with 1 m precision on navigation signals and serves as standard point positioning with meter-level precision and precise relative positioning. However, the potential of navigation ephemeris can be further studied and extended to real-time PPP.
With a different background and purpose from the existing navigation ephemeris investigations, this study proposed a service mode in which the ephemeris parameters were generated to broadcast the ultra-rapid precise orbits with centimeter-level precision, and directly apply to the centimeter-level real-time PPP for the receiver, smartphone, and others. For the first time in GPS, this paper provides the difference in PPP results between the precise orbits and the calculated orbits with the generated ephemeris parameters, and the deviations resulted from the mode of broadcasting precise orbits with the generated ephemeris were carefully evaluated and analyzed in terms of orbits errors and positioning offsets. Consequently, some helpful findings are supplied to real-time PPP. (1) Within the validity period of 2 h, the RMS of relative distance offsets between the results of PPP with the precise orbits and the results of PPP with the calculated orbits by the 18-parameter ephemeris was 1 cm. This implies that the mode of broadcasting precise orbits with 18-parameter ephemeris is completely suitable and feasible for real-time PPP. (2) Within 15 min after the validity period of 2 h, the RMS of relative distance offsets between the results of PPP with the precise orbits and the results of PPP with the predicted orbits by the 18-parameter ephemeris was 0.6 cm. This confirms that the predicted orbits by the 18-parameter ephemeris within 15 min after the validity period can replace the precise orbits. (3) There was no significant difference between the precise orbits and the calculated orbits with the 18-parameter ephemeris during the 2 h validity period. The RMS of distance errors was 1.4 mm in the 18-parameter ephemeris fitting precise orbits during the 2 h validity period. (4) The 18-parameter ephemeris can provide centimeter-level prediction orbits of 15 min after the 2 h validity period. The RMS of distance error was 2.1 cm in the 18-parameter ephemeris predicting orbits of 15 min after the 2 h validity period.
Compared to the classic RTCM mode of broadcasting precise orbits with orbit corrections, the service mode of 18-parameter ephemeris broadcasting precise orbits achieves following advantages. (1) The amount of broadcast data was reduced by 20 times, since only 18 parameters are needed to broadcast within the 2 h validity period. (2) The validity period was expanded by 120 times and increased to 2 h. Thereby, the interruption of real-time services of precise orbits caused by the transmission failure of RTCM correction data stream during the validity period is avoided, and the continuity and reliability of real-time services of precision orbits are improved. (3) Within 15 min after the validity period, the predicted orbits are provided with a precision of 5 cm. Thus, the interruption of the real-time services of precise orbits induced by the transmission failure within 15 min after the validity period are overcome, and the reliability of the real-time services of the precise orbits is ensured. (4) Without additional correction operation on satellite position, the receiver and smartphone can easily obtain the precise orbits with the calculation algorithm the same as the navigation ephemeris, which improves the convenience of real-time services of precise orbits. In summary, the convenience, continuity, and reliability are improved in the real-time services of precise orbits broadcast by the 18-parameter ephemeris.
Finally, the service mode of the 18-parameter ephemeris transmitting precise orbits was validated from two fields. The first validation from the orbital field was the fitting and predicting tests on all GPS satellites over two days with the generated ephemeris broadcasting precise orbits. The second validation from the positioning field was the PPP tests with the generated ephemeris. In the orbital validation, the feasibility of 18-parameter ephemeris broadcasting precise orbits was verified, which was validated by the fitting accuracy during the ephemeris validity period, the prediction accuracy after the validity period, and the suggested length of validity period. In the positioning validation, the availability of PPP with the generated ephemeris was verified, which was validated by the positioning offsets between PPP with the precise orbits and PPP with the calculated orbits from the generated ephemeris during the 2 h validity period; the positioning offsets between PPP with the precise orbits and PPP with the predicted orbits of 15 min after the 2 h validity period from the generated ephemeris; and the positioning errors between the known positions and the results of PPP with the generated ephemeris. However, this study was limited to MEO satellites and PPP tests of GPS, which has certain representativeness in Global Navigation Satellite System (GNSS) applications. In the future, it is recommended to traverse the massive orbits data of all GPS satellites and conduct PPP tests from globally covered stations.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}