Assessing the Effects of Kata and Kumite Techniques on Physical Performance in Elite Karatekas





Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Experimental Setup
2.3. Experimental Protocol
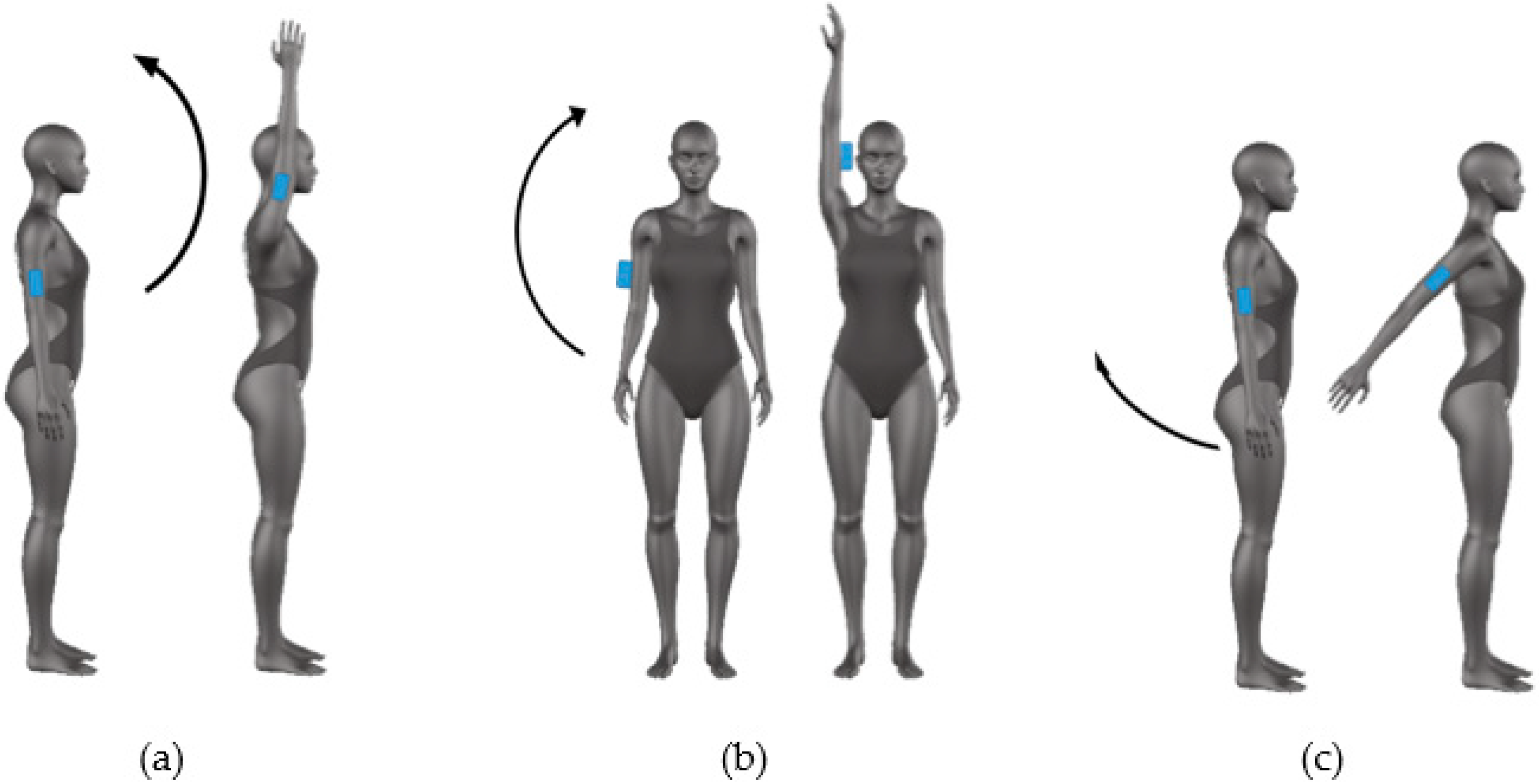
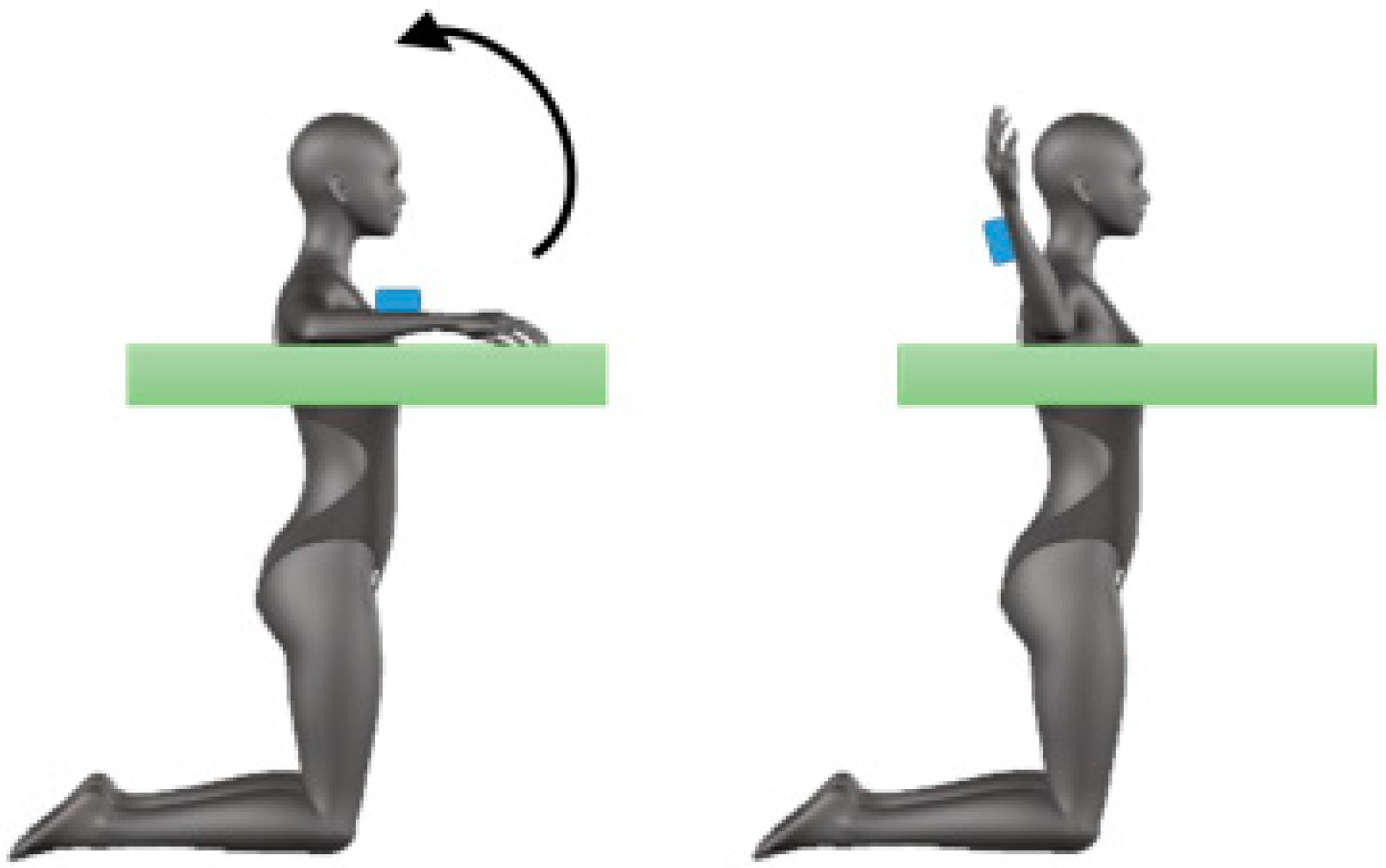
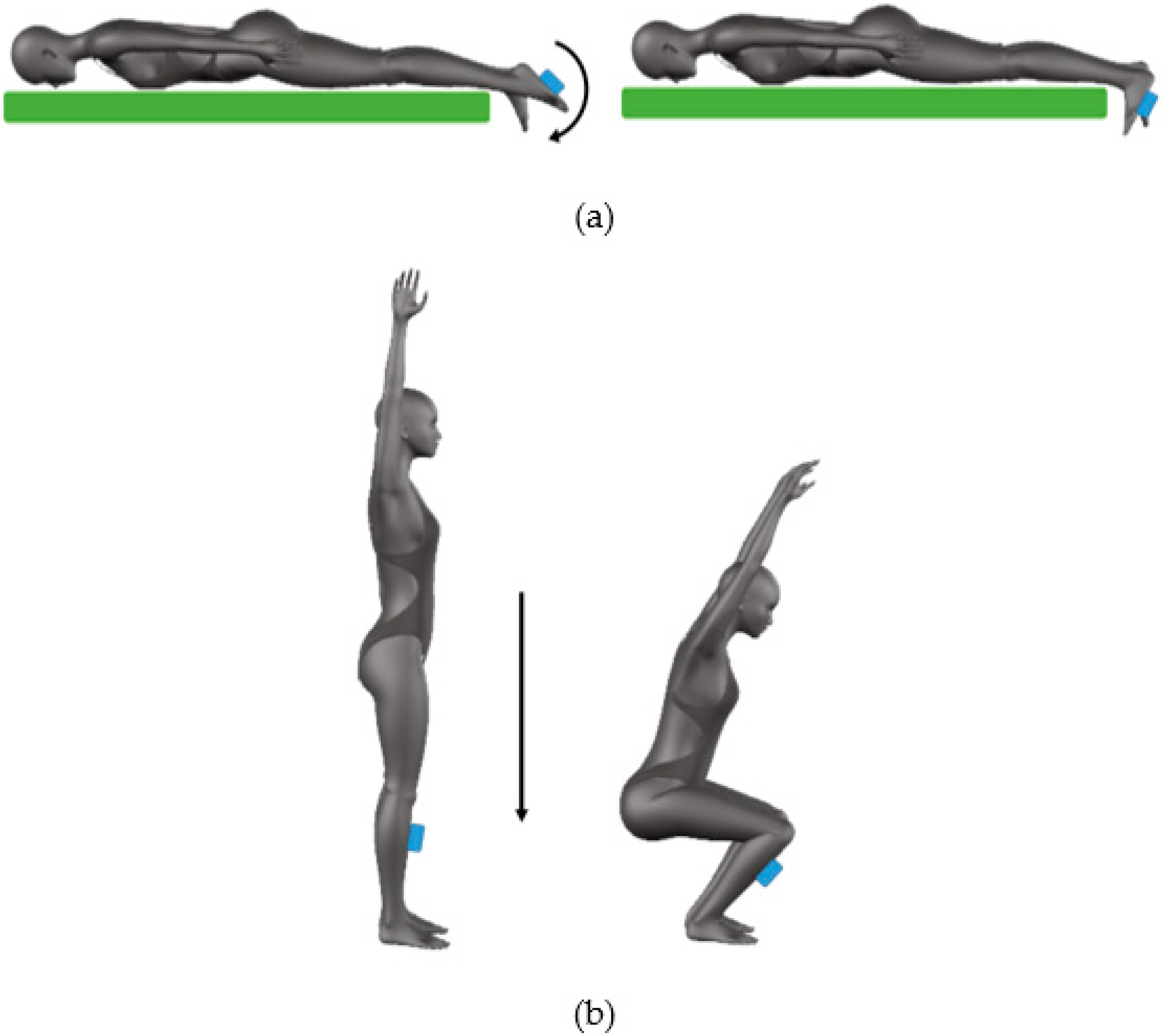
2.3.1. Joint Mobility
Shoulder
Hip
Ankle
2.3.2. Body Stability
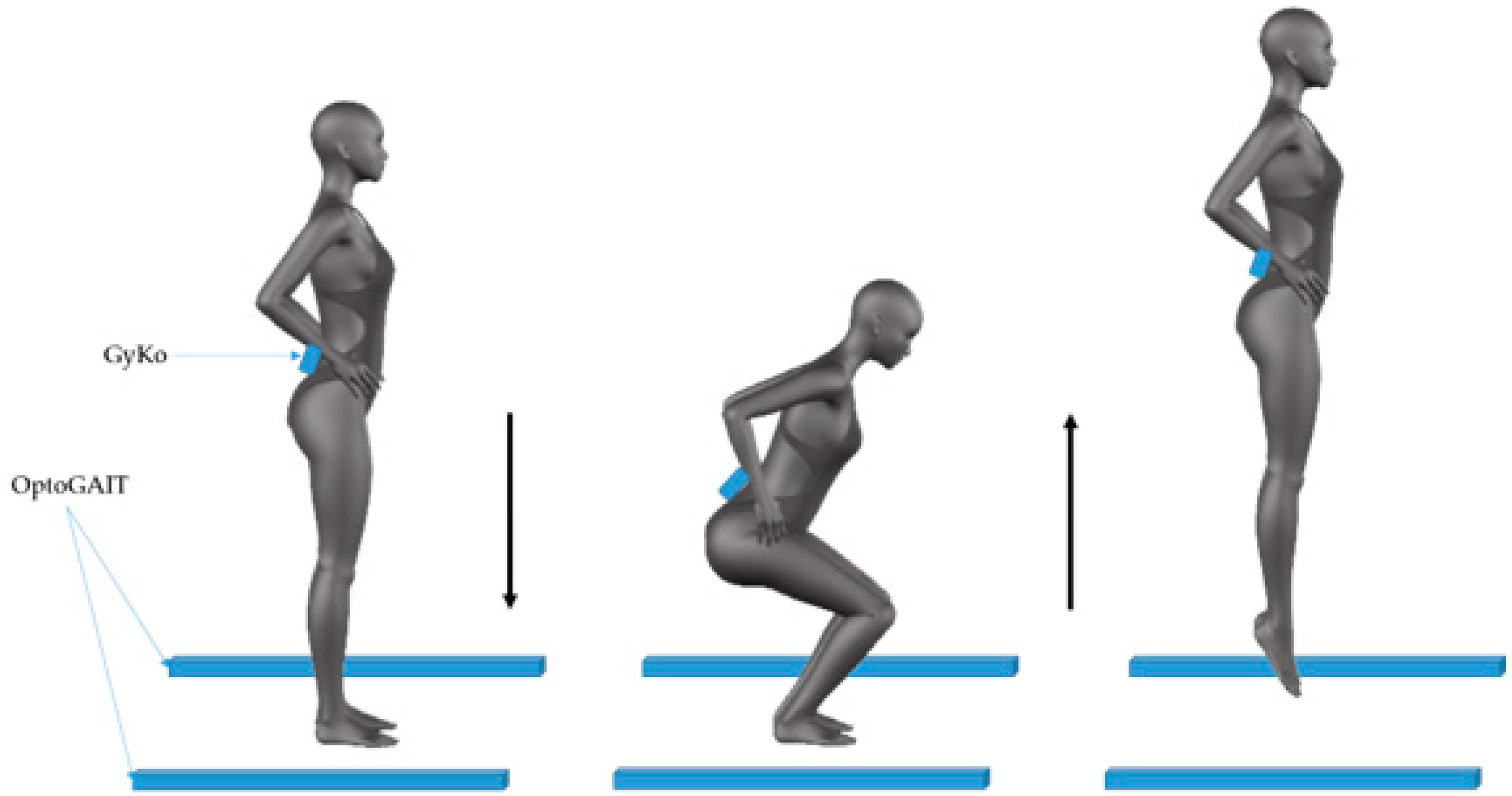
2.3.3. Jumping Ability
2.4. Data Analysis
2.4.1. Joint Mobility
2.4.2. Body Stability
2.4.3. Jumping Ability
2.5. Statistical Analysis
3. Results
3.1. Joint Mobility
3.2. Body Stability
3.3. Jumping Ability
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gauchard, G.C.; Lion, A.; Bento, L.; Perrin, P.P.; Ceyte, H. Postural control in high-level kata and kumite karatekas. Mov. Sport Sci. Sci. Mot. 2018, 21–26. [Google Scholar] [CrossRef]
- Najmi, N.; Abdullah, M.R.; Juahir, H.; Maliki, A.B.H.M.; Musa, R.M.; Mat-Rasid, S.M.; Adnan, A.; Kosni, N.A.; Eswaramoorthi, V.; Alias, N.; et al. Comparison of body fat percentage and physical performance comparison of body fat percentage and physical performance of male national senior and junior karate athletes. J. Fundam. Appl. Sci. 2018, 10, 485–511. [Google Scholar]
- Imamura, H.; Yoshimura, Y.; Nishimura, S.; Nakazawa, A.T. Physiological responses during and following karate training in women. J. Sports Med. Phys. Fit. 2002, 42, 431–437. [Google Scholar]
- Nedeljkovic, A.; Mudric, M.; Cuk, I.; Jovanovic, S.; Jaric, S. Does specialization in karate affect reaction time in specific karate kumite situations? In Proceedings of the Conference of the International Society of Biomechanics in Sports, Cologne, Germany, 14–18 June 2017; pp. 404–407. [Google Scholar]
- Mori, S.; Ohtani, Y.; Imanaka, K. Reaction times and anticipatory skills of karate athletes. Hum. Mov. Sci. 2002, 21, 213–230. [Google Scholar] [CrossRef]
- Filingeri, D.; Bianco, A.; Zangla, D.; Paoli, A.; Palma, A. Is Karate in Improving Postural Control? Sci. Martial Arts 2012, 8, 191–194. [Google Scholar]
- Franchini, E.; Stanislaw, S. Testing motor fitness in karate. Arch. Budo 2009, 5, 29–34. [Google Scholar]
- Güler, M.; Ramazanoglu, N. Evaluation of Physiological Performance Parameters of Elite Karate-Kumite Athletes by the Simulated Karate Performance Test. Univ. J. Educ. Res. 2018, 6, 2238–2243. [Google Scholar] [CrossRef]
- Macan, J.; Bundalo-Vrbanac, D.; Romić, G. Effects of the new karate rules on the incidence and distribution of injuries * Commentary. Br. J. Sports Med. 2006, 40, 326–330. [Google Scholar] [CrossRef] [PubMed]
- Mooney, R.; Corley, G.; Godfrey, A.; Quinlan, L.R. Inertial Sensor Technology for Elite Swimming Performance Analysis: A Systematic Review. Sensors 2016, 16, 18. [Google Scholar] [CrossRef]
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. In-field use of wearable magneto-inertial sesnors for sports performance evaluation. In Proceedings of the 33rd International Conference on Biomechanics in Sports, Poitiers, France, 29 June–3 July 2015; pp. 1425–1428. [Google Scholar]
- Worsey, M.; Espinosa, H.; Shepherd, J.; Thiel, D. Inertial Sensors for Performance Analysis in Combat Sports: A Systematic Review. Sports 2019, 7, 28. [Google Scholar] [CrossRef]
- McDonough, E.; Hinton-Lewis, C.; Espinosa, W.H.G.; Thiel, D.V. Accelerometer Artefacts from Body-Worn Sensors. In Proceedings of the 3rd International Colloquium on Sports Science, Exercise, Engineering and Technology, Kota Kinabalu, Malaysia, 20–22 November 2016; Springer: Singapore, 2019; pp. 109–117. [Google Scholar]
- Kimm, D.; Thiel, D.V. Hand speed measurements in boxing. Procedia Eng. 2015, 112, 502–506. [Google Scholar] [CrossRef]
- Chaabène, H.; Hachana, Y.; Franchini, E.; Mkaouer, B.; Chamari, K. Physical and Physiological Profile of Elite Karate Athletes. Sports Med. 2012, 42, 829–843. [Google Scholar] [PubMed]
- Vanhees, L.; Lefevre, J.; Philippaerts, R.; Martens, M.; Huygens, W.; Troosters, T.; Beunen, G. How to assess physical activity? How to assess physical fitness? Eur. J. Cardiovasc. Prev. Rehabil. 2005, 12, 102–114. [Google Scholar] [CrossRef]
- Doria, C.; Veicsteinas, A.; Limonta, E.; Maggioni, M.A.; Aschieri, P.; Eusebi, F.; Fanò, G.; Pietrangelo, T. Energetics of karate (kata and kumite techniques) in top-level athletes. Eur. J. Appl. Physiol. 2009, 107, 603–610. [Google Scholar] [CrossRef] [PubMed]
- Mirmoezzi, M.; Sadeghi, H.; Jafari, M.; Lotfi, L. The Effect of Fatigue on the Static and Dynamic Balance in Karate Kata and Kumite Elite Men. J. Sport Biomech. 2018, 4, 31–42. [Google Scholar]
- Syaquro, A.; Rusdiana, A. Comparison of Whole Body Reaction and Anticipation Reaction Time Between Kata and Kumite in Karater. IOP Conf. Ser. Mater. Sci. Eng. 2017, 180, 012232. [Google Scholar] [CrossRef]
- Koropanovski, N.; Berjan, B.; Bozic, P.; Pazin, N.; Sanader, A.; Jovanovic, S.; Jaric, S. Anthropometric and physical performance profiles of elite karate kumite and kata competitors. J. Hum. Kinet. 2011, 30, 107–114. [Google Scholar] [CrossRef]
- Zemkova, E. Differential contribution of reaction time and movement velocity to the agility performance reflects sport-specific demands. Hum. Mov. 2016, 17, 94–101. [Google Scholar] [CrossRef]
- World Karate Federation. Karate Competition Rules Contents. Wkf Rules 2019, 2019, 90. [Google Scholar]
- Lienhard, K.; Schneider, D.; Maffiuletti, N.A. Validity of the Optogait photoelectric system for the assessment of spatiotemporal gait parameters. Med. Eng. Phys. 2013, 35, 500–504. [Google Scholar] [CrossRef]
- Lee, M.M.; Song, C.H.; Lee, K.J.; Jung, S.W.; Shin, D.C.; Shin, S.H. Concurrent validity and test-retest reliability of the OPTOGait photoelectric cell system for the assessment of spatio-temporal parameters of the gait of young adults. J. Phys. Ther. Sci. 2014, 26, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Rössler, R.; Donath, L.; Bizzini, M.; Faude, O. A new injury prevention programme for children’s football—FIFA 11+ Kids—can improve motor performance: A cluster-randomised controlled trial. J. Sports Sci. 2016, 34, 549–556. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Lu, X. Design of Inclinometer Based On STM32. IOP Conf. Ser. Earth Environ. Sci. 2019, 252, 032149. [Google Scholar] [CrossRef]
- Lesinski, M.; Muehlbauer, T.; Granacher, U. Concurrent validity of the Gyko inertial sensor system for the assessment of vertical jump height in female sub-elite youth soccer players. BMC Sports Sci. Med. Rehabil. 2016, 8, 35. [Google Scholar] [CrossRef] [PubMed]
- Cigrovski, V.; Franjko, I.; Rupčić, T.; Baković, M.; Matković, A. Comparison of Standard and Newer Balance Tests in Recreational Alpine Skiers and Ski Novices. Monten. J. Sports Sci. Med. 2017, 6, 49–55. [Google Scholar]
- Arede, J.; Figueira, B.; Gonzalo-Skok, O.; Leite, N. Validity and reliability of Gyko Sport for the measurement of barbell velocity on the bench-press exercise. J. Sports Med. Phys. Fit. 2019, 59, 1651–1658. [Google Scholar] [CrossRef]
- Santospagnuolo, A.; Bruno, A.A.; Pagnoni, A.; Martello, F.; Santoboni, F.; Perroni, F.; Vulpiani, M.C.; Vetrano, M. Validity and reliability of the GYKO inertial sensor system for the assessment of the elbow range of motion. J. Sports Med. Phys. Fit. 2019, 59, 1466–1471. [Google Scholar] [CrossRef]
- Jaworski, J.; Ambroży, T.; Lech, G.; Spieszny, M.; Bujas, P.; Żak, M.; Chwała, W. Absolute and relative reliability of several measures of static postural stability calculated using a gyko inertial sensor system. Acta Bioeng. Biomech. 2020, 22. [Google Scholar] [CrossRef]
- Wells, K.F.; Dillon, E.K. The sit and reach—A test of back and leg flexibility. Res. Q. Am. Assoc. Health Phys. Educ. Recreat. 1952, 23, 115–118. [Google Scholar] [CrossRef]
- Vellas, B.J.; Wayne, S.J.; Romero, L.; Baumgartner, R.N.; Rubenstein, L.Z.; Garry, P.J. One-leg balance is an important predictor of injurious falls in older persons. J. Am. Geriatr. Soc. 1997, 45, 735–738. [Google Scholar] [CrossRef]
- Hahn, T.; Foldspang, A.; Vestergaard, E.; Ingemann-Hansen, T. One-leg standing balance and sports activity. Scand. J. Med. Sci. Sports 2007, 9, 15–18. [Google Scholar] [CrossRef]
- Bosco, C. La valutazione della forza con il test di Bosco. In la Valutazione Della Forza Con il Test di Bosco; Società Stampa Sportiva: Rome, Italy, 1992; p. 184. [Google Scholar]
- Van Hooren, B.; Zolotarjova, J. The Difference Between Countermovement and Squat Jump Performances: A Review of Underlying Mechanisms With Practical Applications. J. Strenght Cond. Res. 2017, 31, 2011–2020. [Google Scholar] [CrossRef]
- Markovic, G.; Dizdar, D.; Jukic, I.; Cardinale, M. Reliability and factorial validity of squat and countermovement jump tests. J. Strength Cond. Res. 2004, 18, 551–555. [Google Scholar] [PubMed]
- De Salles, B.F.; Simão, R.; Miranda, F.; Da Silva Novaes, J.; Lemos, A.; Willardson, J.M. Rest interval between sets in strength training. Sports Med. 2009, 39, 766–777. [Google Scholar] [CrossRef]
- Mahony, R.; Hamel, T.; J.-Pflimlin, M. Complementary filter design on the special orthogonal group SO(3). In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 12–15 December 2005. [Google Scholar]
- Grassi, L.; Rossi, S.; Studer, V.; Vasco, G.; Motta, C.; Patanè, F.; Castelli, E.; Rossi, S.; Cappa, P. Quantification of postural stability in minimally disabled multiple sclerosis patients by means of dynamic posturography: An observational study. J. Neuroeng. Rehabil. 2017, 14, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Prieto, T.E.; Myklebust, J.B.; Hoffmann, R.G.; Lovett, E.G.; Myklebust, B.M. Measures of postural steadiness: Differences between healthy young and elderly adults. IEEE Trans. Biomed. Eng. 1996, 43, 956–966. [Google Scholar] [CrossRef] [PubMed]
- Mileti, I.; Taborri, J.; Rossi, S.; Del Prete, Z.; Paoloni, M.; Suppa, A.; Palermo, E. Reactive Postural Responses to Continuous Yaw Perturbations in Healthy Humans: The Effect of Aging. Sensors 2019, 20, 63. [Google Scholar] [CrossRef]
- Faul, F.; Erdfelder, E.; Lang, A.-G.; Buchner, A. G*Power 3: A flexible statistical power analysis program for the social, behavioral, and biomedical sciences. Behav. Res. Methods 2007, 39, 175–191. [Google Scholar] [CrossRef]
- Podrigalo, L.V.; Volodchenko, A.A.; Rovnaya, O.A.; Stankiewicz, B. Analysis of martial arts athletes’ goniometric indicators. Phys. Educ. Stud. 2017, 21, 182. [Google Scholar] [CrossRef]
- Wu, P.P.Y.; Sterkenburg, N.; Everett, K.; Chapman, D.W.; White, N.; Mengersen, K. Predicting fatigue using countermovement jump force-time signatures: PCA can distinguish neuromuscular versus metabolic fatigue. PLoS ONE 2019, 14, e0219295. [Google Scholar] [CrossRef]
- Purcell, A.S.; Young, S.J. Flying vs. Jump Kicks: Defining Ordinary Action in Sport: Editor: Thomas H. Sawyer. J. Phys. Educ. Recreat. Dance 2018, 89, 52–54. [Google Scholar] [CrossRef]
- Ma, A.W.W.; Qu, L.H. Effects of Karate Training on Basic Motor Abilities of Primary School Children. Adv. Phys. Educ. 2017, 7, 130–139. [Google Scholar] [CrossRef]
- Takahata, M.; Shiraki, K.; Sakane, Y.; Takebayashi, Y. Sound feedback for powerful karate training. In Proceedings of the 2004 Conference on New Interfaces for Musical Expression, Hamamatsu, Japan, 3–5 June 2004; pp. 13–18. [Google Scholar]
- Cesari, P.; Bertucco, M. Coupling between punch efficacy and body stability for elite karate. J. Sci. Med. Sport 2008, 11, 353–356. [Google Scholar] [CrossRef] [PubMed]
- Yoon, S.J.; Tauchi, K.; Takamatsu, K. Effect of ankle joint stiffness during eccentric phase in rebound jumps on ankle joint torque at midpoint. Int. J. Sports Med. 2007, 28, 66–71. [Google Scholar] [CrossRef] [PubMed]
- Zarzycki, A.; Witkowski, K.; Pożarowszczyk, B.; Kumorek, M.; Kisilewicz, A.; Smoter, M.; Kawczyński, A. Changes in muscle stiffness as the effect of karate tournament fight. Arch. Budo Sci. Martial Arts Extrem. Sport. 2017, 13, 185–190. [Google Scholar]
- Balasaheb, T.; Maman, P.; Sandhu, J. The Impact Of Visual Skills Training Program On Batting Performance In Cricketers. Serbian J. Sport Sci. 2008, 2, 17–23. [Google Scholar]
- Arriaza, R.; Leyes, M.; Zaeimkohan, H.; Arriaza, A. The injury profile of Karate World Championships: New rules, less injuries. Knee Surg. Sports Traumatol. Arthrosc. 2009, 17, 1437–1442. [Google Scholar] [CrossRef]
- Yun, S.J.; Kim, M.H.; Weon, J.H.; Kim, Y.; Jung, S.H.; Kwon, O.Y. Correlation between toe flexor strength and ankle dorsiflexion rom during the countermovement jump. J. Phys. Ther. Sci. 2016, 28, 2241–2244. [Google Scholar] [CrossRef]
- Martelli, F.; Taborri, J.; Del Prete, Z.; Palermo, E.; Rossi, S. Quantifying Age-Related Differences of Ankle Mechanical Properties Using a Robotic Device. Robotics 2019, 8, 96. [Google Scholar] [CrossRef]
- Larson, G. Examining Ways to Improve Ankle Mobility during the Overhead Squat Lift; University of Delaware: Newark, DE, USA, 2014. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Movement | θ (°) | (°/s) | |||||
|---|---|---|---|---|---|---|---|
| KU | KA | NK | KU | KA | NK | ||
| Shoulder | Flexion | 179.2 (2.1) NK | 172.0 (2.1) NK | 160.1 (1.8) KA,KU | 278.4 (24.6) NK,KA | 143.4 (23.2) KU | 199.1 (8.4) KU |
| Extension | 82.1 (2.3) NK,KA | 68.1 (2.8) KU | 66.3 (1.8) KU | 178.8 (20.3) NK,KA | 90.5 (19.1) KU | 105.0 (6.5) KU | |
| Abduction | 172.6 (1.7) NK | 171.4 (2.3) NK | 155.0 (2.2) KA,KU | 306.1 (26.8) NK,KA | 148.7 (30.9) KU | 215.7 (10.3) KU | |
| Extra-Rotation | 108.1 (1.9) NK | 105.6 (2.4) NK | 89.4 (1.7) KA,KU | 229.6 (22.7) NK,KA | 115.7 (20.1) KU | 166.8 (9.9) KU | |
| Hip | Flexion | 122.4 (2.2) * | 112.6 (3.3) * | 82.1 (1.8) * | 213.4 (15.0) NK,KA | 119.5 (20.1) KU | 100.7 (4.9) KU |
| Split | 78.0 (1.5) NK | 76.5 (2.2) NK | 49.5 (1.7) KA,KU | 155.9 (8.6) * | 105.0 (13.3) * | 37.7 (2.8) * | |
| Sit and Reach | 37.3 (2.5) NK | 36.7 (2.6) NK | 19.4 (2.1) KA,KU | 59.8 (6.9) NK | 51.0 (6.6) NK | 16.5 (2.4) KA,KU | |
| Ankle | Flexion | 71.5 (1.1) * | 80.5 (1.5) * | 57.9 (2.0) * | 96.5 (11.2) | 80.1 (10.4) | 121.3 (11.0) |
| Overhead squat | 29.2 (1.3) KA | 37.8 (1.3) KU,NK | 28.8 (1.0) KA | 32.6 (4.1) | 34.0 (4.7) | 24.5 (2.1) | |
| Movement | (°) | (°/s) | |||||
|---|---|---|---|---|---|---|---|
| KU | KA | NK | KU | KA | NK | ||
| Shoulder | Flexion | 192.0 (1.7) NK | 190.2 (2.2) NK | 171.0 (1.8) KA,KU | 550.4 (18.9) NK | 491.1 (21.6) NK | 407.4 (12.9) KA,KU |
| Extension | 100.9 (2.9) NK | 94.7 (2.4) NK | 80.8 (1.7) KA,KU | 378.8 (14.5) NK | 346.1 (21.6) NK | 234.2 (10.7) KA,KU | |
| Abduction | 179.2 (1.7) NK | 180.4 (1.8) NK | 162.0 (2.0) KA,KU | 522.3 (14.4) NK | 474.1 (23.9) NK | 392.9 (9.3) KA,KU | |
| Extra-Rotation | 117.6 (1.7) NK | 120.6 (2.7) NK | 96.2 (2.3) KA,KU | 529.4 (15.9) * | 448.2 (17.8) * | 354.7 (16.0) * | |
| Hip | Flexion | 139.5 (1.9) NK | 137.0 (3.2) NK | 94.7 (2.7) KA,KU | 331.5 (10.8) NK | 295.4 (14.1) NK | 190.3 (6.8) KA,KU |
| EO | EC | Romberg Index * | |||||
|---|---|---|---|---|---|---|---|
| KU | KA | NK | KU | KA | KU | KA | |
| Path Length (cm) | 48.9 (3.4) NK | 65.8 (8.7) | 68.8 (4.7) KU | 119.0 (12.3) | 120.9 (15.0) | 2.4 (0.3) | 1.8 (0.2) |
| Path Length AP (cm) | 33.8 (2.7) NK | 43.8 (5.4) | 46.0 (3.1) KU | 76.6 (9.1) | 72.6 (8.1) | 2.3 (0.3) | 1.7 (0.2) |
| Path Length ML (cm) | 28.3 (1.9) | 39.4 (6.3) | 42.6 (3.4) | 74.6 (6.7) | 79.7 (11.9) | 2.7 (0.3) | 2.1 (0.3) |
| Ellipse Area (cm2) | 36.4 (7.4) NK | 55.4 (14.7) | 92.7 (13.2) KU | 179.0 (38.3) | 204.9 (47.0) | 9.1 (2.4) KA | 3.9 (0.7) KU |
| Frequency (Hz) | 0.19 (0.01) | 0.19 (0.02) | 0.13 (0.05) | 0.20 (0.01) | 0.18 (0.02) | 1.20 (0.10) | 1.06 (0.08) |
| Frequency AP (Hz) | 0.22 (0.02) | 0.26 (0.03) NK | 0.16 (0.01) KA | 0.22 (0.01) | 0.22 (0.03) | 1.23 (0.12) | 1.12 (0.16) |
| Frequency ML (Hz) | 0.23 (0.02) | 0.24 (0.05) | 0.16 (0.01) | 0.26 (0.18) | 0.22 (0.04) | 1.32 (0.15) | 1.17 (0.12) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molinaro, L.; Taborri, J.; Montecchiani, M.; Rossi, S. Assessing the Effects of Kata and Kumite Techniques on Physical Performance in Elite Karatekas. Sensors 2020, 20, 3186. https://doi.org/10.3390/s20113186
Molinaro L, Taborri J, Montecchiani M, Rossi S. Assessing the Effects of Kata and Kumite Techniques on Physical Performance in Elite Karatekas. Sensors. 2020; 20(11):3186. https://doi.org/10.3390/s20113186
Chicago/Turabian StyleMolinaro, Luca, Juri Taborri, Massimo Montecchiani, and Stefano Rossi. 2020. "Assessing the Effects of Kata and Kumite Techniques on Physical Performance in Elite Karatekas" Sensors 20, no. 11: 3186. https://doi.org/10.3390/s20113186
APA StyleMolinaro, L., Taborri, J., Montecchiani, M., & Rossi, S. (2020). Assessing the Effects of Kata and Kumite Techniques on Physical Performance in Elite Karatekas. Sensors, 20(11), 3186. https://doi.org/10.3390/s20113186