Strain Transfer in Surface-Bonded Optical Fiber Sensors





Abstract
1. Introduction
2. Materials and Methods
- Development of the analytical model of the two sensing cables.
- Development of the experimental setup and testing.
- Numerical modeling of the experimental setup.
2.1. Analytical Model
- A1.
- All the materials involved in the analysis behave as linear elastic materials and there is perfect bonding at all the layer interfaces.
- A2.
- It is assumed that the fiber core and the cladding behave as a unique homogeneus material which is referred to as “optical fiber”.
- A3.
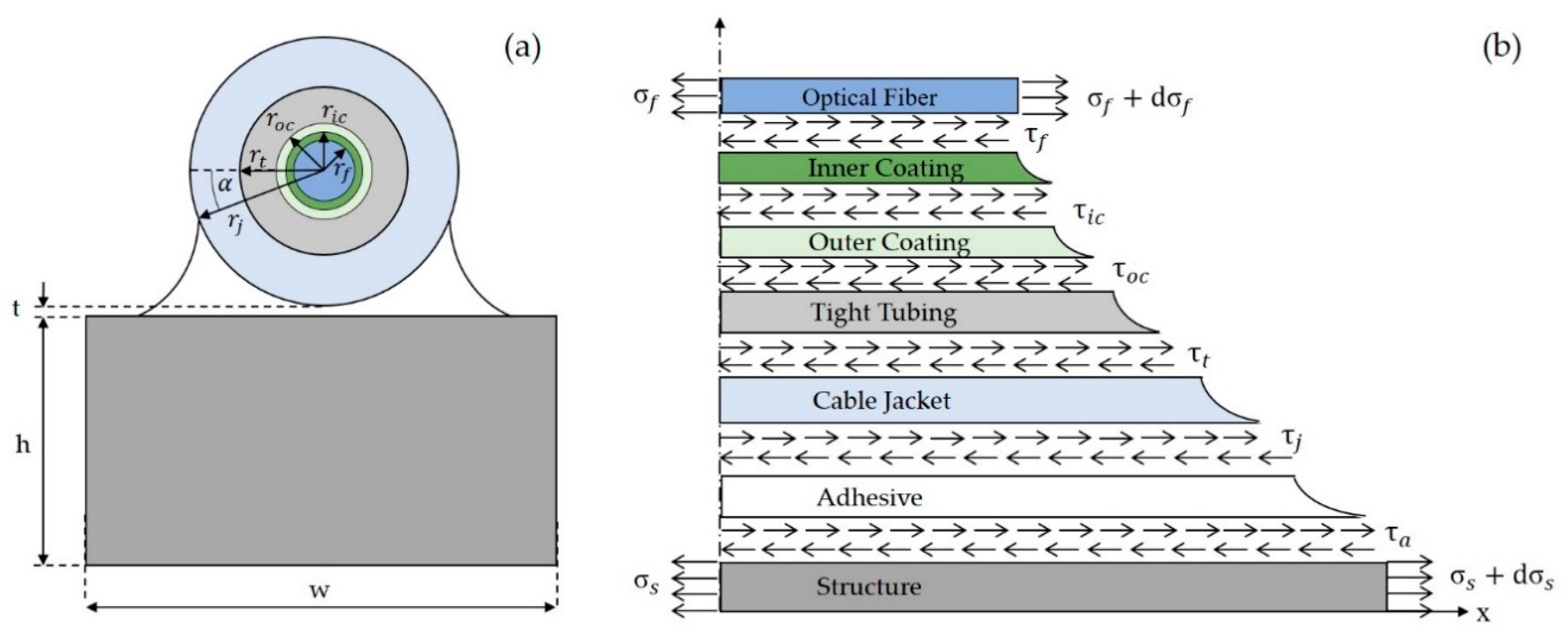
- The optical fiber coatings, the corresponding tight tubing, the cable jacket, and the adhesive carry only shear stresses. Indeed, the Young moduli of these cable components are at least one or two orders of magnitude smaller than those of the optical fiber and the specimen.
- A4.
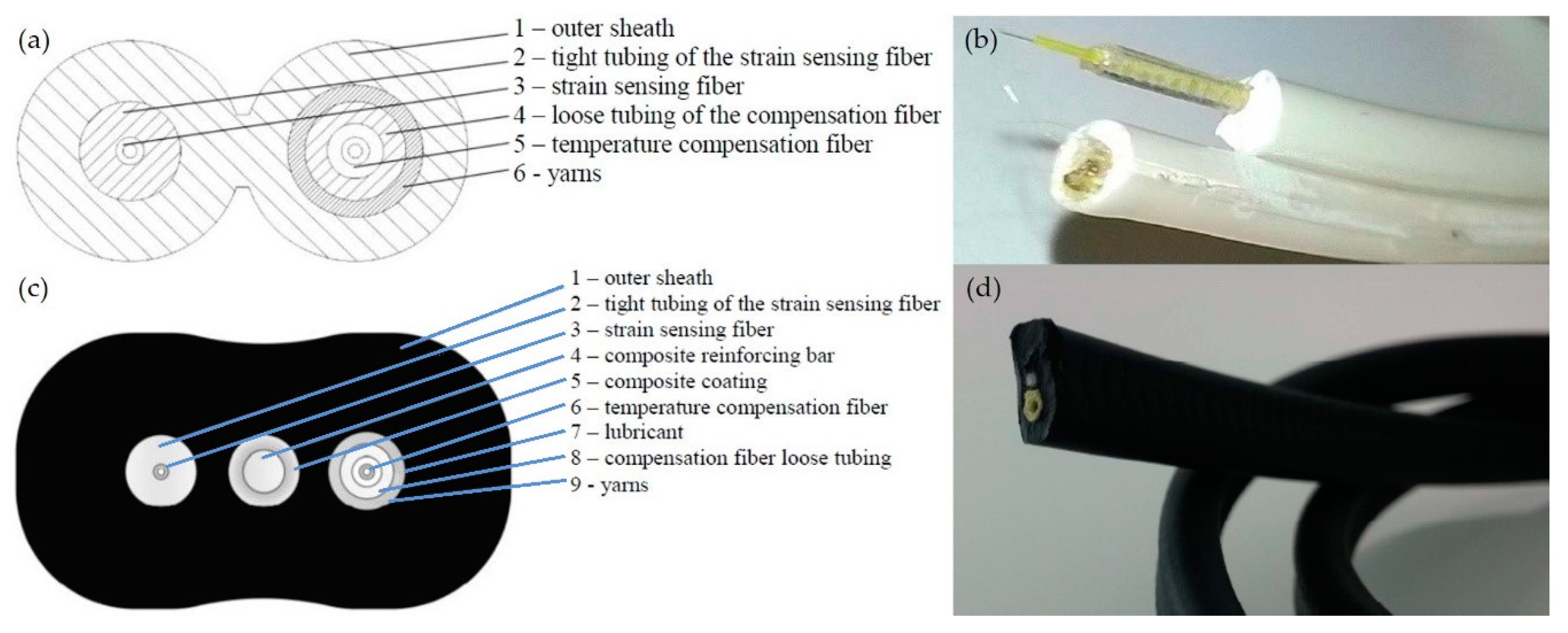
- The strain transfer from the structure towards the fiber core depends only on the cable components surrounding the fiber under test. Therefore, referring to Figure 1a,c only the left half of the two cables, where the strain sensing fiber is embedded, was considered in the development of the model.
- A5.
- In the second cable prototype the effect of the reinforced bar is neglected, since, as already said, it is mechanically decoupled from the surrounding cable jacket.
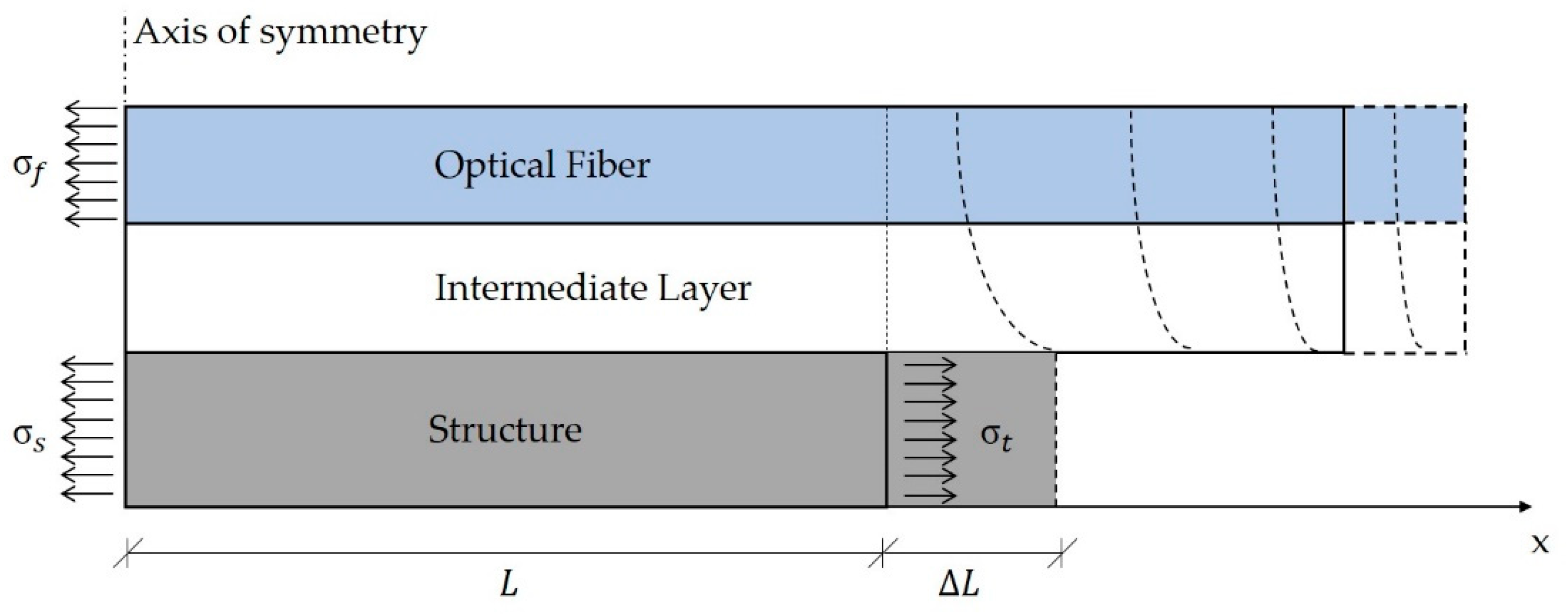
2.1.1. Cable-Specimen Interaction
2.1.2. Interrogator Resolution
2.2. Experimental Methodology
2.2.1. Sensing Principle
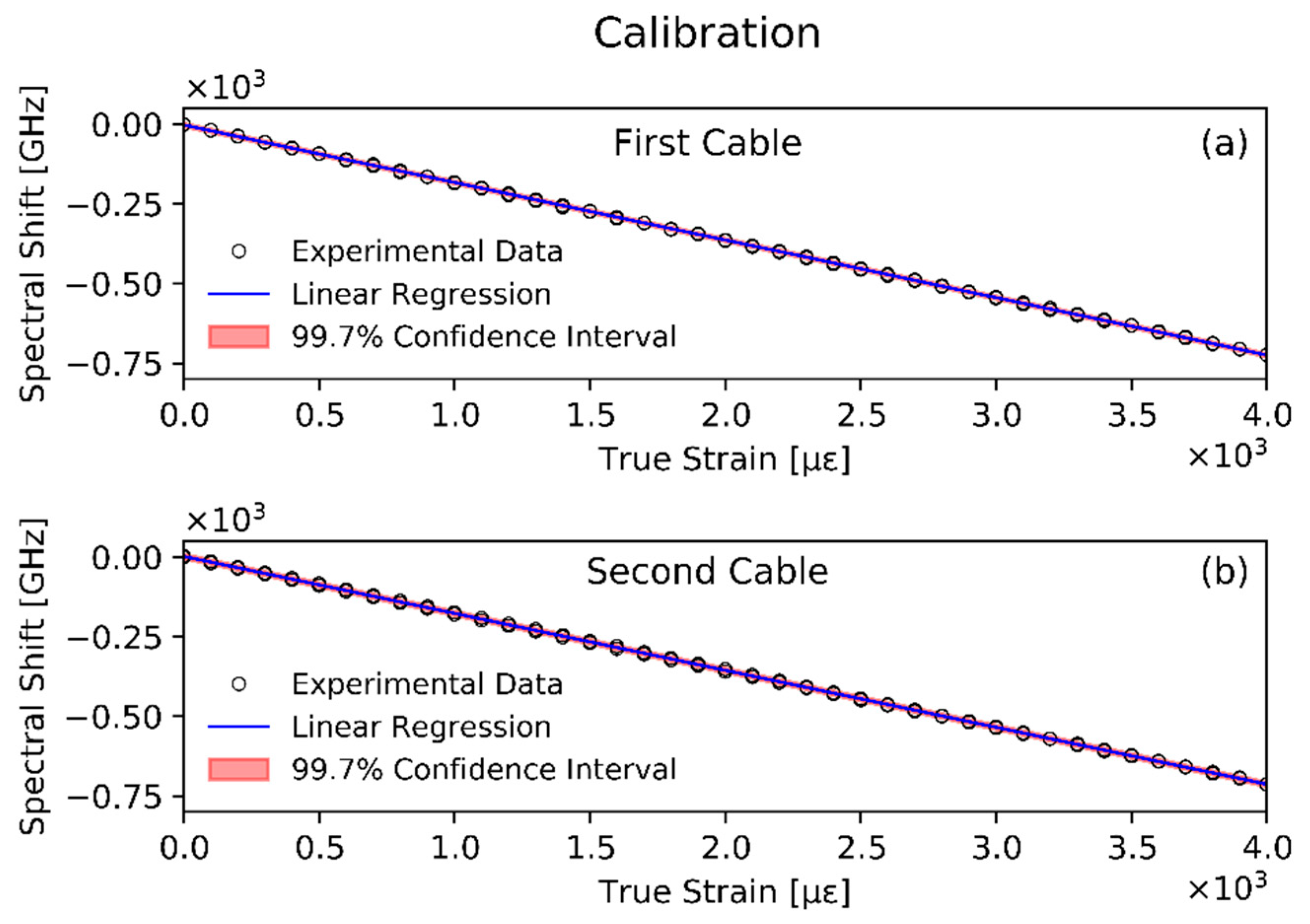
2.2.2. Calibration
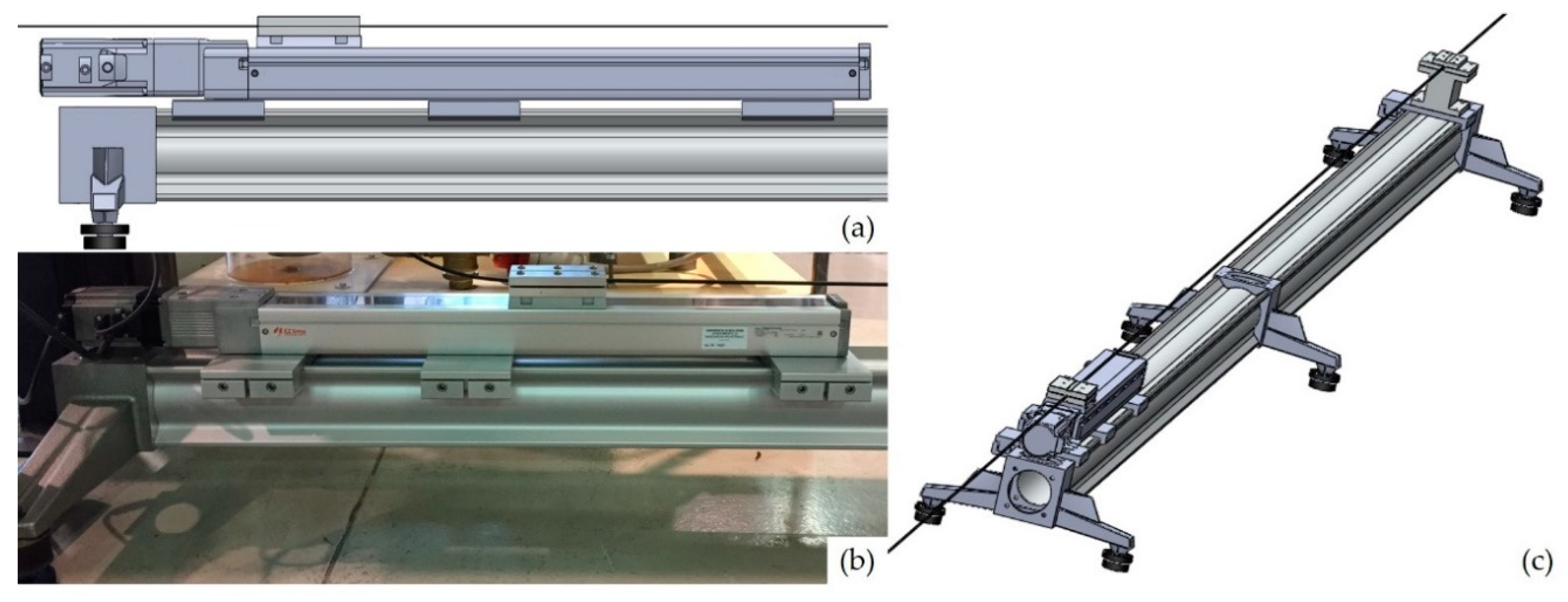
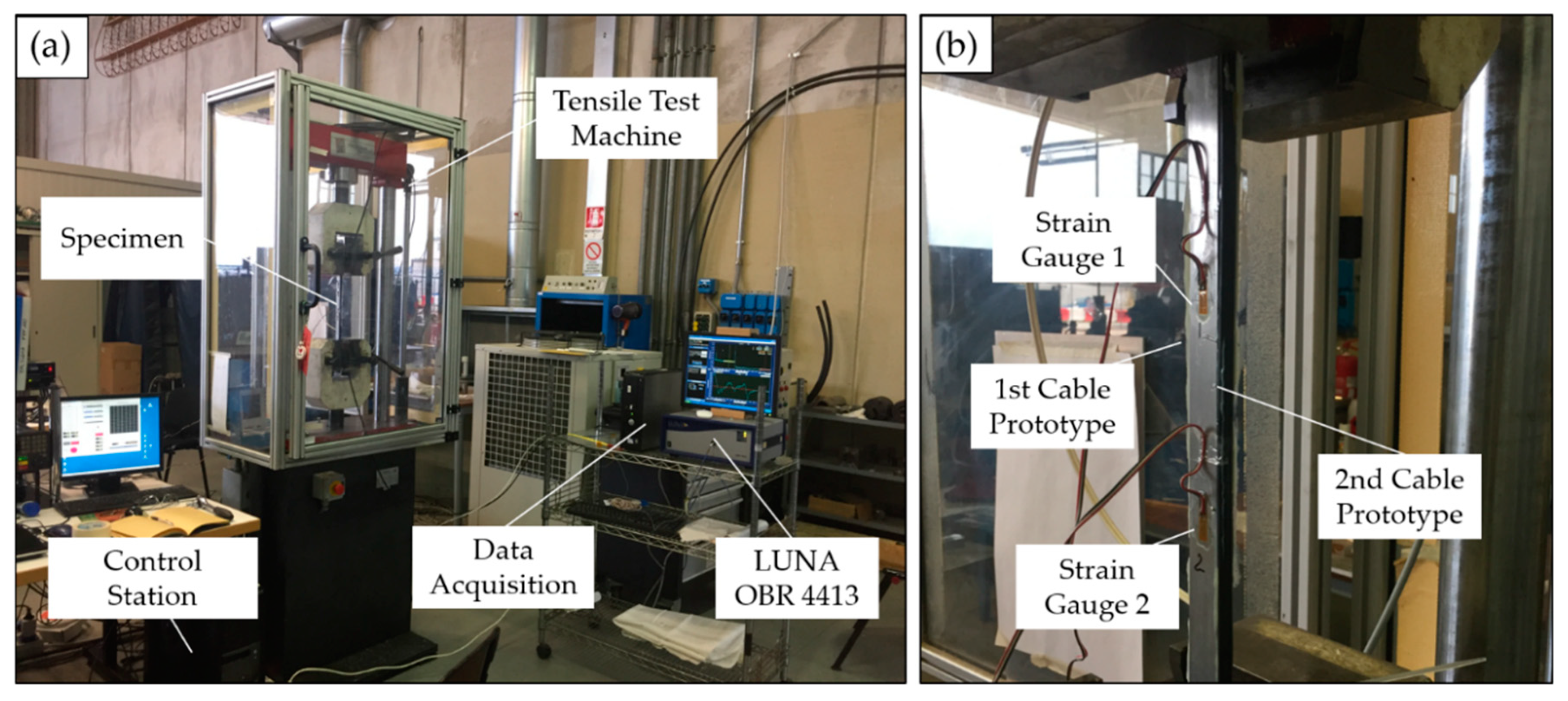
2.2.3. Experimental Setup
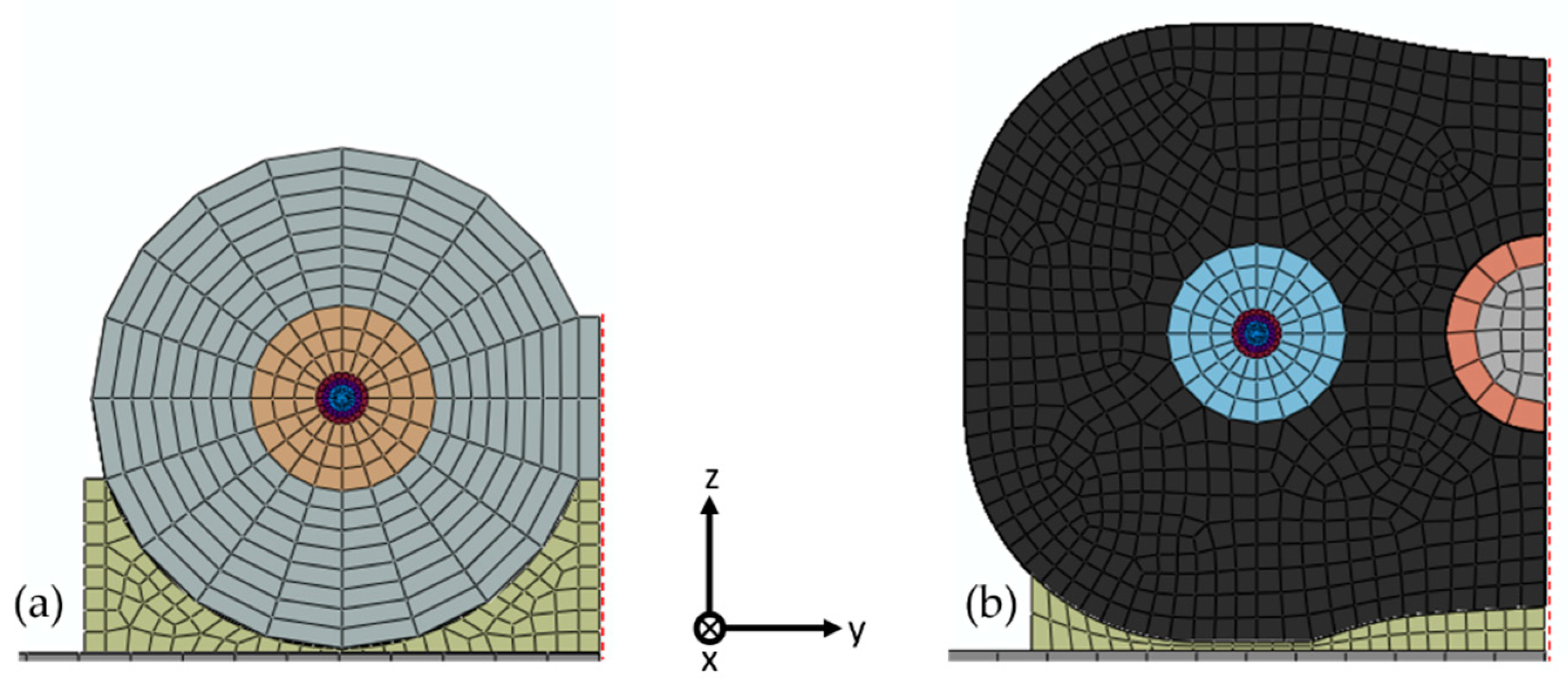
2.3. Numerical Model
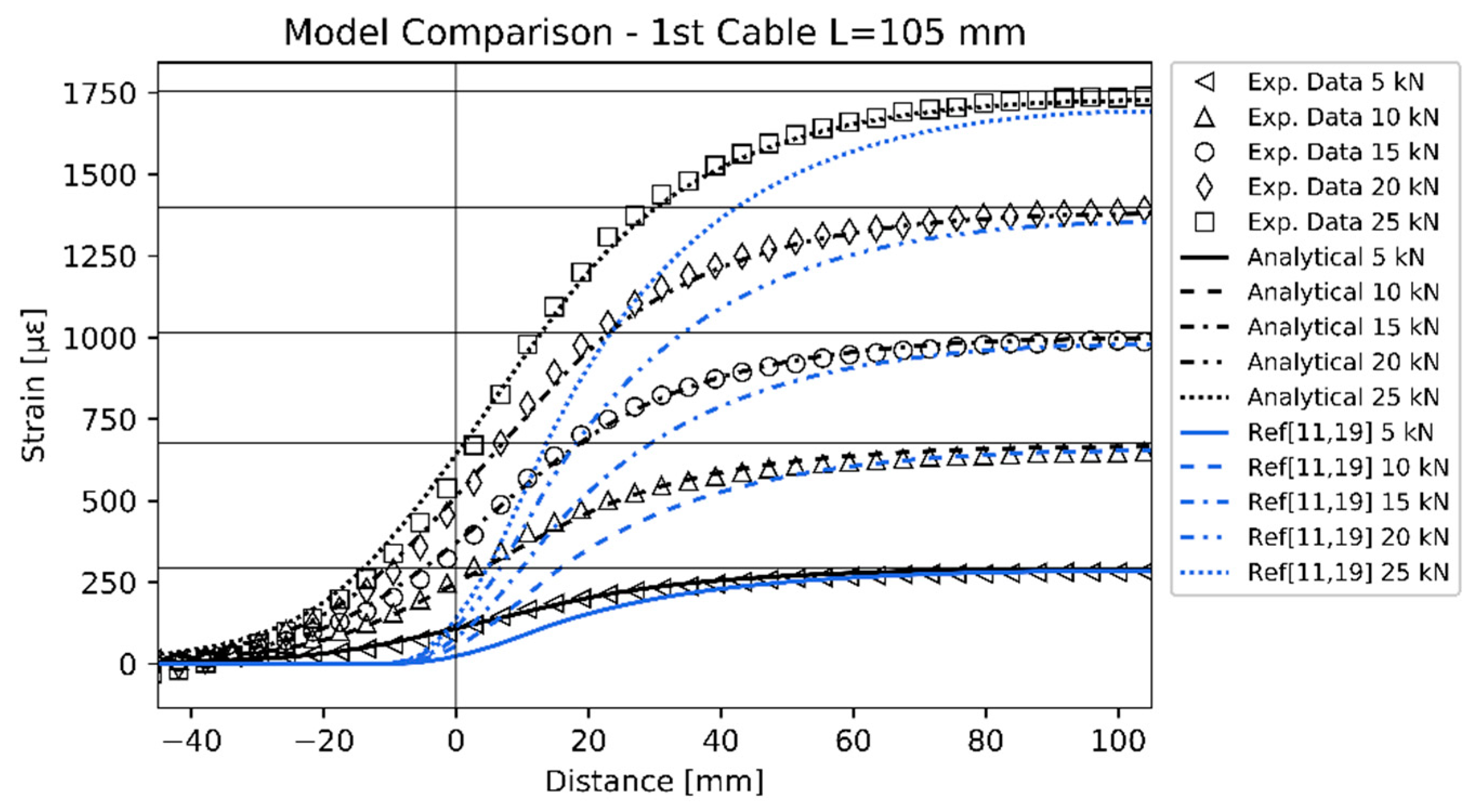
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Keiser, G. Optical Fiber Communications, 4th ed.; McGraw-Hill Companies: New York, NY, USA, 2011. [Google Scholar]
- Di Sante, R. Fibre optic sensors for structural health monitoring of aircraft composite structures: Recent advances and applications. Sensors 2015, 15, 18666–18713. [Google Scholar] [CrossRef] [PubMed]
- Bastianini, F.; Di Sante, R.; Falcetelli, F.; Marini, D.; Bolognini, G. Optical fiber sensing cables for Brillouin-based distributed measurements. Sensors 2019, 19, 5172. [Google Scholar] [CrossRef] [PubMed]
- Schenato, L.; Palmieri, L.; Camporese, M.; Bersan, S.; Cola, S.; Pasuto, A.; Galtarossa, A.; Salandin, P.; Simonini, P. Distributed optical fibre sensing for early detection of shallow landslides triggering. Sci. Rep. 2017, 7, 14686. [Google Scholar] [CrossRef] [PubMed]
- Cola, S.; Schenato, L.; Brezzi, L.; Tchamaleu Pangop, F.C.; Palmieri, L.; Bisson, A. Composite Anchors for Slope Stabilisation: Monitoring of their In-Situ Behaviour with Optical Fibre. Geosciences 2019, 9, 240. [Google Scholar] [CrossRef]
- Cox, H.L. The elasticity and strength of paper and other fibrous materials. Br. J. Appl. Phys. 1952, 3, 72. [Google Scholar] [CrossRef]
- Claus, R.O.; Bennett, K.D.; Vengsarkar, A.M.; Murphy, K.A. Embedded optical fiber sensors for materials evaluation. J. Nondestruct. Eval. 1989, 8, 135–145. [Google Scholar] [CrossRef]
- Nanni, A.; Yang, C.C.; Pan, K.; Wang, J.S.; Michael, R.R. Fiber-optic sensors for concrete strain/stress measurement. ACI Mater. J. 1991, 88, 257–264. [Google Scholar]
- Pak, Y.E. Longitudinal shear transfer in fiber optic sensors. Smart Mater. Struct. 1992, 1, 57–62. [Google Scholar] [CrossRef]
- Ansari, F.; Libo, Y. Mechanics of bond and interface shear transfer in optical fiber sensors. J. Eng. Mech. 1998, 124, 385–394. [Google Scholar] [CrossRef]
- Li, D.; Li, H.; Ren, L.; Song, G. Strain transferring analysis of fiber Bragg grating sensors. Opt. Eng. 2006, 45, 024402. [Google Scholar] [CrossRef]
- Li, H.-N.; Zhou, G.-D.; Ren, L.; Li, D.-S. Strain transfer coefficient analyses for embedded fiber Bragg grating sensors in different host materials. J. Eng. Mech. 2009, 135, 1343–1353. [Google Scholar] [CrossRef]
- LeBlanc, M.; Guemes, A.; Othonos, A.; Huang, S.Y.; Ohn, M.; Measures, R.M. Distributed strain measurement based on a fiber Bragg grating and its reflection spectrum analysis. Opt. Lett. 1996, 21, 1405. [Google Scholar] [CrossRef] [PubMed]
- Guemes, J.A.; Menéndez, J.M. Response of Bragg grating fiber-optic sensors when embedded in composite laminates. Compos. Sci. Technol. 2002, 62, 959–966. [Google Scholar] [CrossRef]
- Wang, H.; Xiang, P. Strain transfer analysis of optical fiber based sensors embedded in an asphalt pavement structure. Meas. Sci. Technol. 2016, 27, 075106. [Google Scholar] [CrossRef]
- Li, D.; Ren, L.; Li, H. Mechanical property and strain transferring mechanism in optical fiber sensors. In Fiber Optic Sensors; Yasin, M., Ed.; InTech: London, UK, 2012. [Google Scholar]
- Wan, K.T.; Leung, C.K.Y.; Olson, N.G. Investigation of the strain transfer for surface-attached optical fiber strain sensors. Smart Mater. Struct. 2008, 17, 035037. [Google Scholar] [CrossRef]
- Li, W.Y.; Cheng, C.C.; Lo, Y.L. Investigation of strain transmission of surface-bonded FBGs used as strain sensors. Sens. Actuators A Phys. 2009, 149, 201–207. [Google Scholar] [CrossRef]
- Her, S.-C.; Huang, C.-Y. Effect of coating on the strain transfer of optical fiber sensors. Sensors 2011, 11, 6926–6941. [Google Scholar] [CrossRef] [PubMed]
- Feng, X.; Zhou, J.; Sun, C.; Zhang, X.; Ansari, F. Theoretical and experimental investigations into crack detection with BOTDR-distributed fiber optic sensors. J. Eng. Mech. 2013, 139, 1797–1807. [Google Scholar] [CrossRef]
- Billon, A.; Hénault, J.-M.; Quiertant, M.; Taillade, F.; Khadour, A.; Martin, R.-P.; Benzarti, K. Qualification of a distributed optical fiber sensor bonded to the surface of a concrete structure: A methodology to obtain quantitative strain measurements. Smart Mater. Struct. 2015, 24, 115001. [Google Scholar] [CrossRef]
- Pervasive Ubiquitous Lightwave Sensor. Available online: https://cordis.europa.eu/project/id/737801 (accessed on 30 May 2020).
- Soto, M.A.; Sahu, P.K.; Faralli, S.; Sacchi, G.; Bolognini, G.; Di Pasquale, F.; Nebendahl, B.; Rueck, C. High Performance and Highly Reliable Raman-Based Distributed Temperature Sensors Based on Correlation-Coded OTDR and Multimode Graded-Index Fibers. In Proceedings of the Third European Workshop on Optical Fibre Sensors, Napoli, Italy, 4–6 July 2007. [Google Scholar]
- Marini, D.; Iuliano, M.; Bastianini, F.; Bolognini, G. BOTDA sensing employing a modified Brillouin fiber laser probe source. J. Lightwave Technol. 2018, 36, 1131–1137. [Google Scholar] [CrossRef]
- Yuan, H. Improved theoretical solutions of FRP-to-concrete interfaces. In Proceedings of the International Symposium on Bond Behaviour of FRP in Structures, Hong Kong, China, 7–9 December 2005. [Google Scholar]
- Ben-Simon, U.; Shoham, S.; Ofir, Y.; Goldstein, N.; Davidi, R.; Gorbatov, N.; Kressel, I.; Tur, M. Choosing the Right Optical Fiber Coating to Meet Individual Fiber-Optic Strain Measurement Application. In Proceedings of the Structural Health Monitoring 2019; DEStech Publications, Inc.: Lancaster, PA, USA, 2019. [Google Scholar]
- Henault, J.M.; Salin, J.; Moreau, G.; Quiertant, M.; Taillade, F.; Benzarti, K.; Delepine-Lesoille, S. Analysis of the strain transfer mechanism between a truly distributed optical fiber sensor and the surrounding medium. In Proceedings of the Concrete Repair, Rehabilitation and Retrofitting III, Cape Town, South Africa, 3–5 September 2012. [Google Scholar]
- Soller, B.J.; Wolfe, M.S.; Froggatt, M.E. Polarization Resolved Measurement of Rayleigh Backscatter in Fiber-optic Components. In Proceedings of the OFC Technical Digest; OSA Publishing: Washington, DC, USA, 2005. [Google Scholar]
- Kreger, S.T.; Gifford, D.K.; Froggatt, M.E.; Soller, B.J.; Wolfe, M.S. High Resolution Distributed Strain or Temperature Measurements in Single- and Multi-Mode Fiber Using Swept-Wavelength Interferometry. In Proceedings of the Optical Fiber Sensors, Cancún, Mexico, 23–27 October 2006. [Google Scholar]
- Gifford, D.K.; Kreger, S.T.; Sang, A.K.; Froggatt, M.E.; Duncan, R.G.; Wolfe, M.S.; Soller, B.J. Swept-wavelength interferometric interrogation of fiber Rayleigh scatter for distributed sensing applications. In Proceedings of the Fiber Optic Sensors and Applications V, International Society for Optics and Photonics, Boston, MA, USA, 12–16 October 2007. [Google Scholar]
- Rao, Y.J. Fiber Bragg grating sensors: Principles and applications. In Optical Fiber Sensor Technology; Grattan, K.T.V., Meggitt, B.T., Eds.; Springer US: Boston, MA, USA, 1998. [Google Scholar]
- LUNA Technologies. Optical Backscatter Reflectometer User Guide; LUNA: Roanoke, VA, USA, 2009. [Google Scholar]
- LUNA Technologies. ODiSI-B Sensor Strain Gage Factor Uncertainty; LUNA: Roanoke, VA, USA, 2016. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensing Cable: I | Cable Components | |||||
|---|---|---|---|---|---|---|
| Optical Fiber | Inner Coating | Outer Coating | Tight Tubing | Cable Jacket | Adhesive | |
| Material | Silica | “Soft” Acrylate | “Stiff” Acrylate | Polyamide | LDPE 1 | Epoxy |
| Young’s Modulus [GPa] | 21.7 | 1.30 ∙10−3 | 1.55 | 2.5 | 0.2 | 1.72 |
| Shear Modulus [GPa] | 8.89 | 4.36 ∙10−4 | 0.54 | 0.9 | 0.07 | 0.65 |
| Outer Radius [] | 62.5 | 95 | 125 | 450 | 1200 | n/a |
| Sensing Cable: II | Cable Components | |||||
|---|---|---|---|---|---|---|
| Optical Fiber | Inner Coating | Outer Coating | Tight Tubing | Cable Jacket | Adhesive | |
| Material | Silica | “Soft” Acrylate | “Stiff” Acrylate | LDPE 2 | EPDM 3 | Epoxy |
| Young’s Modulus [GPa] | 21.7 | 1.30 ∙10−3 | 1.55 | 0.2 | 7.8 ∙10−3 | 1.72 |
| Shear Modulus [GPa] | 8.89 | 4.36 ∙10−4 | 0.54 | 0.07 | 2.7 ∙10−3 | 0.65 |
| Outer Radius [] | 62.5 | 95 | 125 | 450 | 1800 | n/a |
| Specimen | |||||
|---|---|---|---|---|---|
| Material | Young’s Modulus [GPa] | Shear Modulus [GPa] | Thickness [mm] | Width [mm] | Length [mm] |
| Aluminum 7075—T6 | 71.7 | 26.9 | 8 | 20 | 300 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Falcetelli, F.; Rossi, L.; Di Sante, R.; Bolognini, G. Strain Transfer in Surface-Bonded Optical Fiber Sensors. Sensors 2020, 20, 3100. https://doi.org/10.3390/s20113100
Falcetelli F, Rossi L, Di Sante R, Bolognini G. Strain Transfer in Surface-Bonded Optical Fiber Sensors. Sensors. 2020; 20(11):3100. https://doi.org/10.3390/s20113100
Chicago/Turabian StyleFalcetelli, Francesco, Leonardo Rossi, Raffaella Di Sante, and Gabriele Bolognini. 2020. "Strain Transfer in Surface-Bonded Optical Fiber Sensors" Sensors 20, no. 11: 3100. https://doi.org/10.3390/s20113100
APA StyleFalcetelli, F., Rossi, L., Di Sante, R., & Bolognini, G. (2020). Strain Transfer in Surface-Bonded Optical Fiber Sensors. Sensors, 20(11), 3100. https://doi.org/10.3390/s20113100