Enhancing BCI-Based Emotion Recognition Using an Improved Particle Swarm Optimization for Feature Selection

 , and
, and
Abstract
1. Introduction
2. Methodology
2.1. Data Acquisition and Stimuli
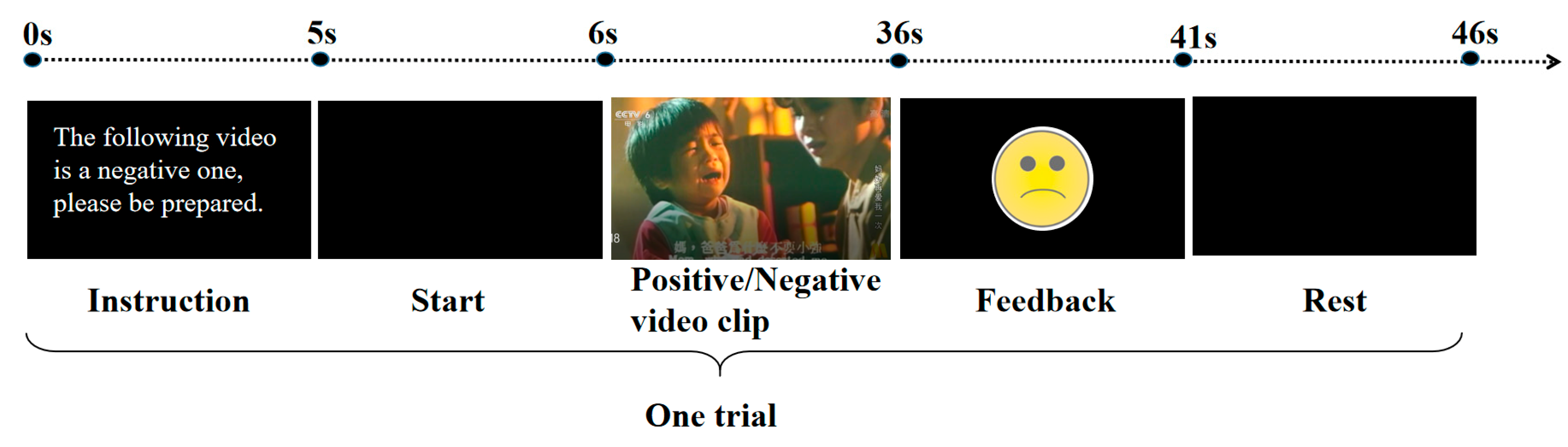
2.2. Graphical User Interface (GUI) and BCI Paradigm
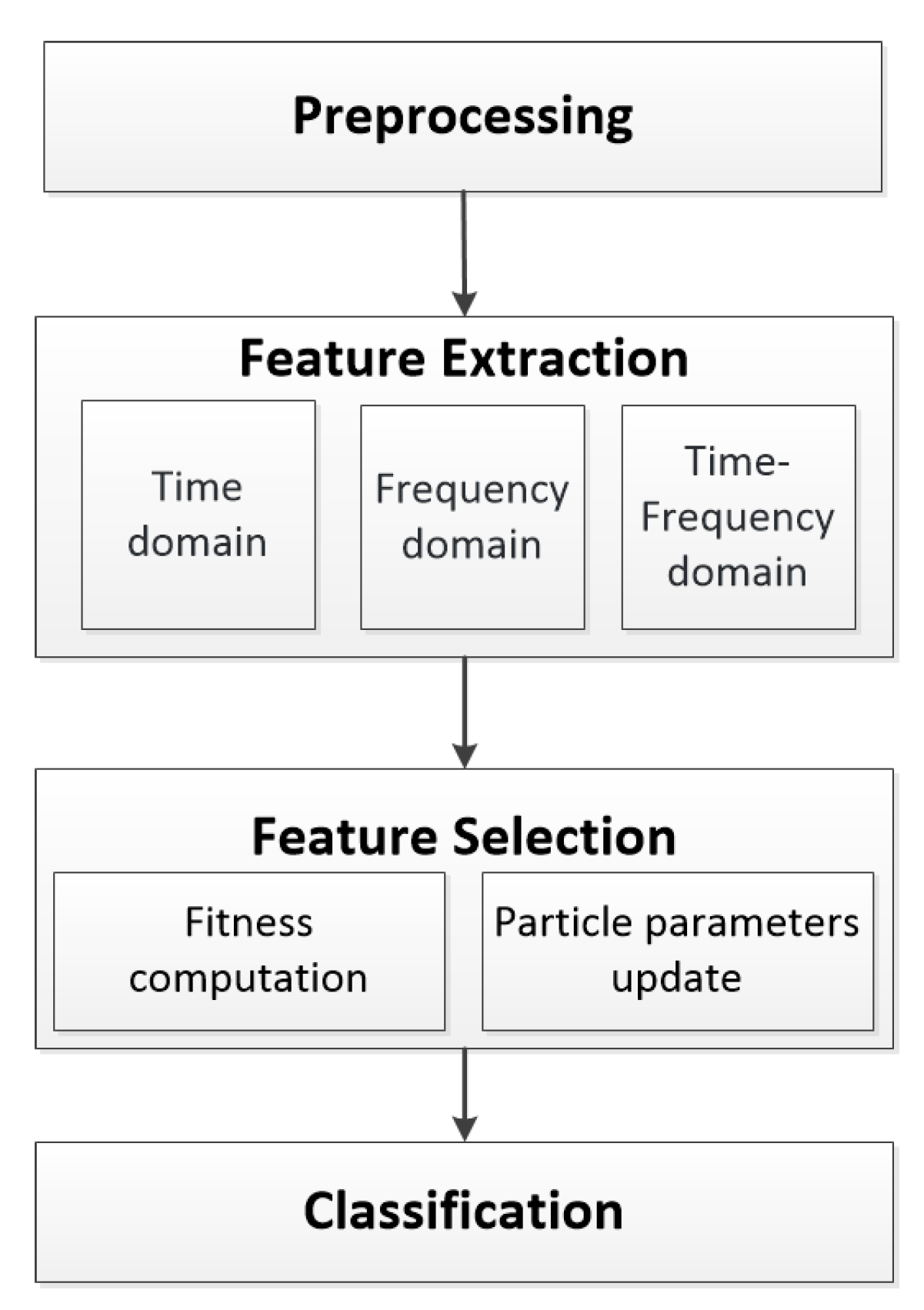
2.3. Data Processing and Algorithm
2.3.1. Preprocessing
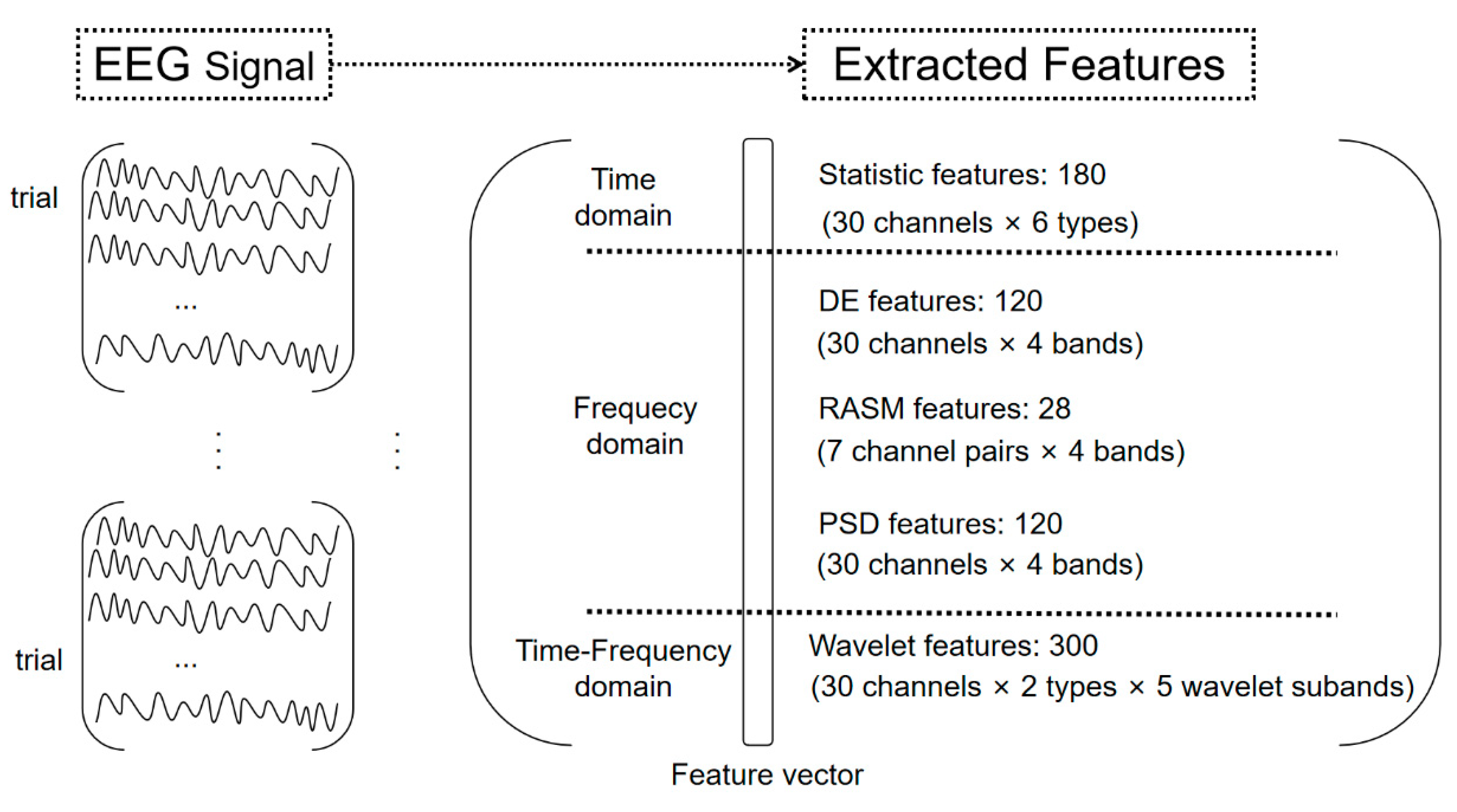
2.3.2. Feature Extraction
Power Spatial Density (PSD) Features
Differential Entropy (DE) Features
Rational Asymmetry (RASM) Features
Features based on Wavelet Coefficient
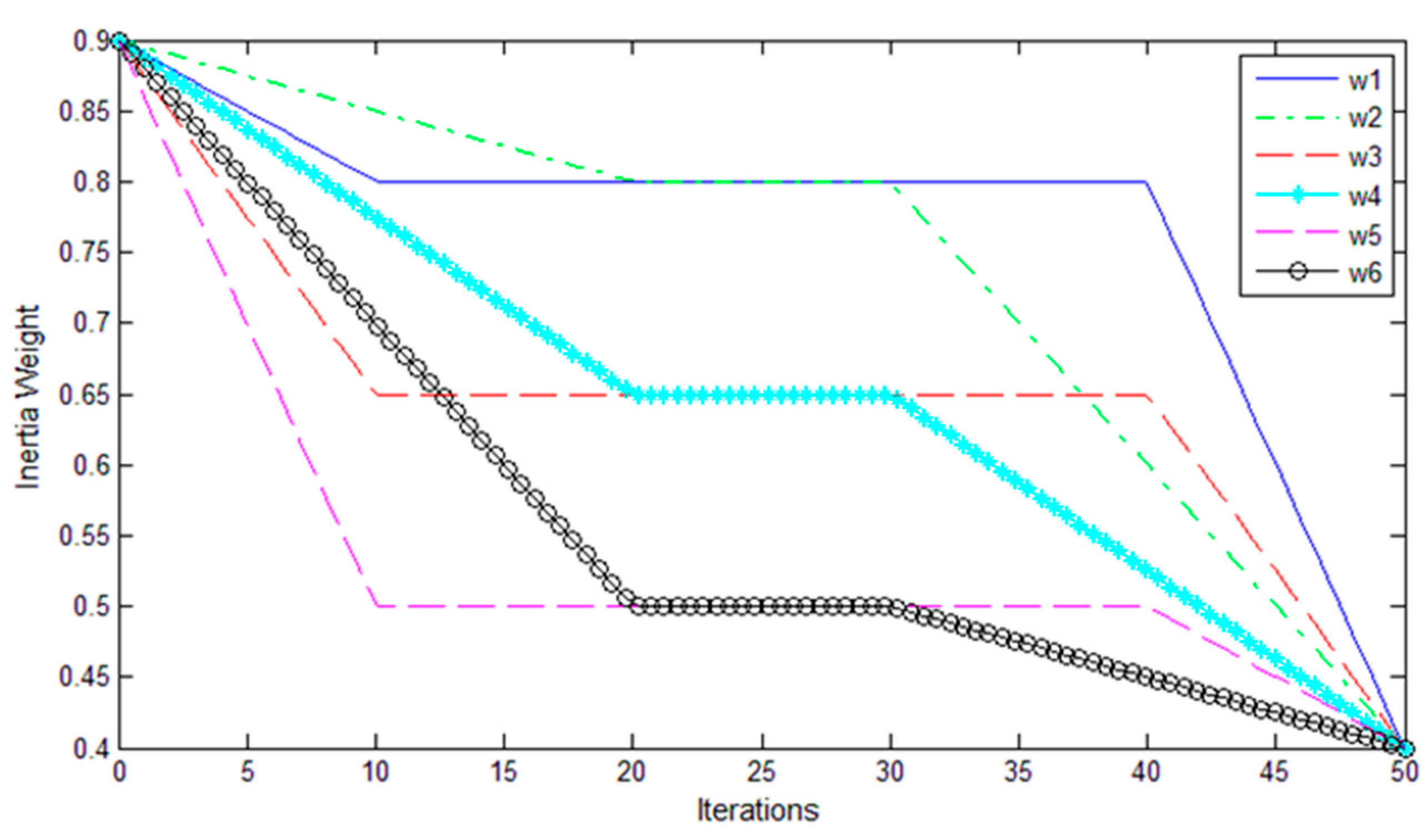
2.3.3. Feature Selection Based on MLDW-PSO
| Algorithm 1: MLDW-PSO-based feature selection |
| Input: Dataset, the set of feature and label |
| Output: The accuracy of classification |
| Step1: //Initialize x with random position and vi with random velocity |
| // Set ws = 0.9, we = 0.4, wm = 0.5, MaxDT = 10, t1 = 20, t2 = 30, = 0.8. |
| Xi < -randomPosition(); |
| Vi < -randomVelocity(); |
| Calculate the fitness value with fitness(Xi > ); |
| Gbest = X1; |
| Determine pbest, gbest according to fitness(Xi > ); |
| Step 2: //find gbest, the global best particle |
| for t = 1:t1 |
| for I = 1:K |
| w = (ws − wm)*(t1 − t)/t1 + wm; |
| Update Xi, Vi according to Equations (16) and (17); |
| Update pbest, gbest according to fitness(Xi > ); |
| end for |
| end for |
| for t= t1 + 1:t2 |
| for i= 1:K |
| w = wm; |
| Update Xi, Vi according to Equations (16) and (17); |
| Update pbest, gbest according to fitness(Xi > ); |
| end for |
| end for |
| for t= t2 + 1:MaxDT |
| for i = 1:K |
| w = (wm − we)*(MaxDT − t)/(MaxDT − t2) + we; |
| Update Xi, Vi according to Equations (16) and (17); |
| Update pbest, gbest according to fitness(Xi > ); |
| end for |
| end for |
| Step 3: // Compute best fitness(result) |
| result=fitness(gbest > ); |
2.3.4. Model Training and Classification
3. Experiment and Result
3.1. Experiment I (Offline)
3.2. Experiment II (Offline)
3.3. Experiment III (Online)
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hossain, M.S.; Muhammad, G. Emotion recognition using deep learning approach from audio–visual emotional big data. Inf. Fusion 2019, 49, 69–78. [Google Scholar] [CrossRef]
- Posner, J.; Russell, J.A.; Peterson, B.S. The circumplex model of affect: An integrative approach to affective neuroscience, cognitive development, and psychopathology. Dev. Psychopathol. 2005, 17, 715–734. [Google Scholar] [CrossRef]
- Hjorth, B. EEG analysis based on time domain properties. Electroencephalogr. Clin. Neurophysiol. 1970, 29, 306–310. [Google Scholar] [CrossRef]
- Liu, Y.; Sourina, O. Real-time fractal-based valence level recognition from EEG. In Transactions on Computational Science XVIII; Springer: Berlin, Germany, 2013; pp. 101–120. [Google Scholar]
- Hosseini, S.A.; Khalilzadeh, M.A.; Naghibi-Sistani, M.B.; Niazmand, V. Higher order spectra analysis of EEG signals in emotional stress states. In Proceedings of the 2010 Second International Conference on Information Technology and Computer Science, Kiev, Ukraine, 24–25 July 2010; pp. 60–63. [Google Scholar]
- Thammasan, N.; Moriyama, K.; Fukui, K.I.; Numao, M. Continuous music-emotion recognition based on electroencephalogram. IEICE Trans. Inf. Syst. 2016, 99, 1234–1241. [Google Scholar] [CrossRef]
- Shi, L.-C.; Jiao, Y.-Y.; Lu, B.-L. Differential entropy feature for EEG-based vigilance estimation. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 6627–6630. [Google Scholar]
- Zheng, W.-L.; Zhu, J.-Y.; Lu, B.-L. Identifying stable patterns over time for emotion recognition from EEG. IEEE Trans. Affect. Comput. 2017, 10, 417–429. [Google Scholar] [CrossRef]
- Jahankhani, P.; Kodogiannis, V.; Revett, K. EEG signal classification using wavelet feature extraction and neural networks. In Proceedings of the IEEE John Vincent Atanasoff 2006 International Symposium on Modern Computing (JVA’06), Sofia, Bulgaria, 3–6 October 2006; pp. 120–124. [Google Scholar]
- Samara, A.; Menezes, M.L.R.; Galway, L. Feature extraction for emotion recognition and modelling using neurophysiological data. In Proceedings of the 2016 15th international conference on ubiquitous computing and communications and 2016 international symposium on cyberspace and security (IUCC-CSS), Granada, Spain, 14–16 December 2016; pp. 138–144. [Google Scholar]
- Liu, Y.; Sourina, O. Real-time subject-dependent EEG-based emotion recognition algorithm. In Transactions on Computational Science XXIII; Springer: Berlin, Germany, 2014; pp. 199–223. [Google Scholar]
- Arnau-González, P.; Arevalillo-Herráez, M.; Ramzan, N. Fusing highly dimensional energy and connectivity features to identify affective states from EEG signals. Neurocomputing 2017, 244, 81–89. [Google Scholar] [CrossRef]
- Yin, Z.; Wang, Y.; Liu, L.; Zhang, W.; Zhang, J. Cross-subject EEG feature selection for emotion recognition using transfer recursive feature elimination. Front. Neurorobotics 2017, 11, 19. [Google Scholar] [CrossRef]
- Inbarani, H.H.; Azar, A.T.; Jothi, G. Supervised hybrid feature selection based on PSO and rough sets for medical diagnosis. Comput. Methods Programs Biomed. 2014, 113, 175–185. [Google Scholar] [CrossRef]
- Kumar, S.U.; Inbarani, H.H. PSO-based feature selection and neighborhood rough set-based classification for BCI multiclass motor imagery task. Neural Comput. Appl. 2017, 28, 3239–3258. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R.C. Empirical study of particle swarm optimization. In Proceedings of the 1999 congress on evolutionary computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; pp. 1945–1950. [Google Scholar]
- Sourina, O.; Liu, Y.; Nguyen, M.K. Real-time EEG-based emotion recognition for music therapy. J. Multimodal User Interfaces 2012, 5, 27–35. [Google Scholar] [CrossRef]
- Pan, J.; Li, Y.; Wang, J. An EEG-based brain-computer interface for emotion recognition. In Proceedings of the 2016 international joint conference on neural networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 2063–2067. [Google Scholar]
- Daly, I.; Williams, D.; Kirke, A.; Weaver, J.; Malik, A.; Hwang, F.; Miranda, E.; Nasuto, S.J. Affective brain–computer music interfacing. J. Neural Eng. 2016, 13, 046022. [Google Scholar] [CrossRef]
- Koelstra, S.; Muhl, C.; Soleymani, M.; Lee, J.-S.; Yazdani, A.; Ebrahimi, T.; Pun, T.; Nijholt, A.; Patras, I. Deap: A database for emotion analysis; using physiological signals. IEEE Trans. Affect. Comput. 2011, 3, 18–31. [Google Scholar] [CrossRef]
- Soleymani, M.; Lichtenauer, J.; Pun, T.; Pantic, M. A multimodal database for affect recognition and implicit tagging. IEEE Trans. Affect. Comput. 2011, 3, 42–55. [Google Scholar] [CrossRef]
- Bradley, M.M.; Lang, P.J. Measuring emotion: The self-assessment manikin and the semantic differential. J. Behav. Ther. Exp. Psychiatry 1994, 25, 49–59. [Google Scholar] [CrossRef]
- Kuppens, P.; Tuerlinckx, F.; Russell, J.A.; Barrett, L.F. The relation between valence and arousal in subjective experience. Psychol. Bull. 2013, 139, 917. [Google Scholar] [CrossRef]
- Duan, R.-N.; Zhu, J.-Y.; Lu, B.-L. Differential entropy feature for EEG-based emotion classification. In Proceedings of the 2013 6th International IEEE/EMBS Conference on Neural Engineering (NER), San Diego, CA, USA, 6–8 November 2013; pp. 81–84. [Google Scholar]
- Mallat, S.G. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Bratton, D.; Kennedy, J. Defining a Standard for Particle Swarm Optimization. In Proceedings of the 2007 IEEE Swarm Intelligence Symposium, Honolulu, HI, USA, 1–5 April 2007; pp. 120–127. [Google Scholar] [CrossRef]
- Salman, A.; Ahmad, I.; Al-Madani, S. Particle swarm optimization for task assignment problem. Microprocess. Microsyst. 2002, 26, 363–371. [Google Scholar] [CrossRef]
- Xin, J.; Chen, G.; Hai, Y. A particle swarm optimizer with multi-stage linearly-decreasing inertia weight. In Proceedings of the 2009 International Joint Conference on Computational Sciences and Optimization, Sanya, China, 24–26 April 2009; pp. 505–508. [Google Scholar]
- Chang, C.-C.; Lin, C.-J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. (TIST) 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Jenke, R.; Peer, A.; Buss, M. Feature extraction and selection for emotion recognition from EEG. IEEE Trans. Affect. Comput. 2014, 5, 327–339. [Google Scholar] [CrossRef]
- Petrantonakis, P.C.; Hadjileontiadis, L.J. Adaptive emotional information retrieval from EEG signals in the time-frequency domain. IEEE Trans. Signal Process. 2012, 60, 2604–2616. [Google Scholar] [CrossRef]
- Wagh, K.P.; Vasanth, K. Electroencephalograph (EEG) Based Emotion Recognition System: A Review. In Innovations in Electronics and Communication Engineering (Lecture Notes in Networks and Systems); Springer: Singapore, 2019; pp. 37–59. [Google Scholar]
- Chen, J.; Hu, B.; Wang, Y.; Dai, Y.; Yao, Y.; Zhao, S. A three-stage decision framework for multi-subject emotion recognition using physiological signals. In Proceedings of the 2016 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), Shenzhen, China, 15–18 December 2016; pp. 470–474. [Google Scholar]
- Gupta, V.; Chopda, M.D.; Pachori, R.B. Cross-subject emotion recognition using flexible analytic wavelet transform from EEG signals. IEEE Sens. J. 2018, 19, 2266–2274. [Google Scholar] [CrossRef]
- Liu, Y.-J.; Yu, M.; Zhao, G.; Song, J.; Ge, Y.; Shi, Y. Real-time movie-induced discrete emotion recognition from EEG signals. IEEE Trans. Affect. Comput. 2017, 9, 550–562. [Google Scholar] [CrossRef]
- Zhuang, N.; Zeng, Y.; Yang, K.; Zhang, C.; Tong, L.; Yan, B. Investigating patterns for self-induced emotion recognition from EEG signals. Sensors 2018, 18, 841. [Google Scholar] [CrossRef]
- Jatupaiboon, N.; Pan-ngum, S.; Israsena, P. Real-time EEG-based happiness detection system. Sci. World J. 2013, 2013. [Google Scholar] [CrossRef]
- Hadjidimitriou, S.K.; Hadjileontiadis, L.J. Toward an EEG-based recognition of music liking using time-frequency analysis. IEEE Trans. Biomed. Eng. 2012, 59, 3498–3510. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| w1 | w2 | w3 | w4 | w5 | w6 | |
|---|---|---|---|---|---|---|
| wm | 0.8 | 0.8 | 0.65 | 0.65 | 0.5 | 0.5 |
| t1 | 10 | 20 | 10 | 20 | 10 | 20 |
| t2 | 40 | 30 | 40 | 30 | 40 | 30 |
| Multi-Stage Strategies | 10 | 30 | 50 |
|---|---|---|---|
| W0-PSO | 78.13 | 76.56 | 73.44 |
| W1-PSO | 75 | 73.44 | 75 |
| W2-PSO | 79.69 | 78.13 | 81.25 |
| W3-PSO | 78.13 | 73.44 | 75 |
| W4-PSO | 70.31 | 71.88 | 73.44 |
| W5-PSO | 75 | 76.56 | 73.44 |
| W6-PSO | 81.25 | 81.25 | 82.81 |
| Subjects | W0-PSO | W2-PSO | W6-PSO | Subjects | W0-PSO | W2-PSO | W6-PSO |
|---|---|---|---|---|---|---|---|
| s4 | 2 s | 6 s | 13 s | s20 | 13 s | 1 s | 3 s |
| s8 | 2 s | 2 s | 3 s | s24 | 2 s | 1 s | 2 s |
| s12 | 2 s | 7 s | 2 s | s28 | 2 s | 2 s | 2 s |
| s16 | 5 s | 2 s | 2 s | s32 | 6 s | 1 s | 2 s |
| Subjects | Statistic Features | PSD Features | DE Features | RASM Features | Wavelet Features | Combination without Feature Selection | Relief Feature Selection | Standard PSO Feature Selection | MLDW-PSO-Based Feature Selection |
|---|---|---|---|---|---|---|---|---|---|
| s1 | 47.5 | 25 | 50 | 35 | 35 | 42.5 | 40 | 75 | 77.5 |
| s2 | 35 | 55 | 32.5 | 42.5 | 42.5 | 55 | 50 | 70 | 82.5 |
| s3 | 52.5 | 47.5 | 47.5 | 57.5 | 62.5 | 32.5 | 60 | 72.5 | 77.5 |
| s5 | 35 | 42.5 | 42.5 | 42.5 | 32.5 | 40 | 50 | 62.5 | 67.5 |
| s6 | 42.5 | 45 | 47.5 | 42.5 | 45 | 22.5 | 45 | 72.5 | 72.5 |
| s7 | 37.5 | 32.5 | 47.5 | 47.5 | 37.5 | 35 | 50 | 60 | 75 |
| s9 | 42.5 | 42.5 | 47.5 | 37.5 | 37.5 | 40 | 50 | 67.5 | 80 |
| s10 | 45 | 37.5 | 52.5 | 45 | 35 | 32.5 | 40 | 67.5 | 75 |
| s11 | 35 | 35 | 35 | 32.5 | 22.5 | 30 | 37.5 | 67.5 | 67.5 |
| s13 | 55 | 50 | 52.5 | 65 | 30 | 32.5 | 60 | 75 | 75 |
| s14 | 57.5 | 62.5 | 52.5 | 52.5 | 42.5 | 52.5 | 40 | 75 | 77.5 |
| s15 | 25 | 45 | 32.5 | 35 | 45 | 57.5 | 32.5 | 75 | 77.5 |
| s17 | 42.5 | 40 | 52.5 | 42.5 | 30 | 47.5 | 45 | 80 | 75 |
| s18 | 37.5 | 47.5 | 47.5 | 47.5 | 47.5 | 47.5 | 52.5 | 72.5 | 72.5 |
| s19 | 42.5 | 37.5 | 42.5 | 47.5 | 50 | 45 | 50 | 72.5 | 75 |
| s21 | 37.5 | 32.5 | 37.5 | 37.5 | 42.5 | 25 | 50 | 75 | 75 |
| s22 | 30 | 52.5 | 45 | 47.5 | 52.5 | 42.5 | 42.5 | 75 | 67.5 |
| s23 | 40 | 37.5 | 37.5 | 50 | 32.5 | 47.5 | 40 | 70 | 82.5 |
| s25 | 50 | 47.5 | 37.5 | 32.5 | 55 | 50 | 42.5 | 70 | 70 |
| s26 | 50 | 27.5 | 62.5 | 37.5 | 27.5 | 42.5 | 47.5 | 75 | 75 |
| s27 | 57.5 | 70 | 55 | 55 | 52.5 | 52.5 | 62.5 | 82.5 | 85 |
| s29 | 50 | 42.5 | 47.5 | 60 | 42.5 | 47.5 | 50 | 82.5 | 85 |
| s30 | 37.5 | 50 | 30 | 47.5 | 55 | 35 | 57.5 | 70 | 80 |
| s31 | 50 | 37.5 | 47.5 | 47.5 | 35 | 57.5 | 47.5 | 80 | 92.5 |
| Avg. | 43.13 | 43.44 | 45.10 | 45.31 | 41.25 | 42.19 | 47.60 | 72.71 | 76.67 |
| Std | 8.57 | 10.39 | 8.13 | 8.61 | 10.05 | 9.90 | 7.57 | 5.56 | 6.02 |
| Subject | H1 | H2 | H3 | H4 | H5 | H6 | H7 | H8 | H9 | H10 | Average Accuracy |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Online Accuracy (%) | 90 | 95 | 95 | 85 | 100 | 85 | 90 | 90 | 80 | 85 | 89.50 ± 5.68 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Qiu, L.; Li, R.; He, Z.; Xiao, J.; Liang, Y.; Wang, F.; Pan, J. Enhancing BCI-Based Emotion Recognition Using an Improved Particle Swarm Optimization for Feature Selection. Sensors 2020, 20, 3028. https://doi.org/10.3390/s20113028
Li Z, Qiu L, Li R, He Z, Xiao J, Liang Y, Wang F, Pan J. Enhancing BCI-Based Emotion Recognition Using an Improved Particle Swarm Optimization for Feature Selection. Sensors. 2020; 20(11):3028. https://doi.org/10.3390/s20113028
Chicago/Turabian StyleLi, Zina, Lina Qiu, Ruixin Li, Zhipeng He, Jun Xiao, Yan Liang, Fei Wang, and Jiahui Pan. 2020. "Enhancing BCI-Based Emotion Recognition Using an Improved Particle Swarm Optimization for Feature Selection" Sensors 20, no. 11: 3028. https://doi.org/10.3390/s20113028
APA StyleLi, Z., Qiu, L., Li, R., He, Z., Xiao, J., Liang, Y., Wang, F., & Pan, J. (2020). Enhancing BCI-Based Emotion Recognition Using an Improved Particle Swarm Optimization for Feature Selection. Sensors, 20(11), 3028. https://doi.org/10.3390/s20113028