Preliminary Study on Assessing Delaminated Cracks in Cement Asphalt Mortar Layer of High-Speed Rail Track Using Traditional and Normalized Impact–Echo Methods

 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Theoretical Backgrounds
2.1. IE Response for a Plate
2.2. Normalized IE Spectrum
2.3. Thickness–Amplitude of Concrete Plate-Like Structure without Substrate
3. Experimental Design
3.1. Specimen Design
3.2. Instrumentation
4. Experimental Results
4.1. Zones A and C
4.2. Zone B with the CA Mortar Layer of 135 mm
5. Discussion and Conclusions
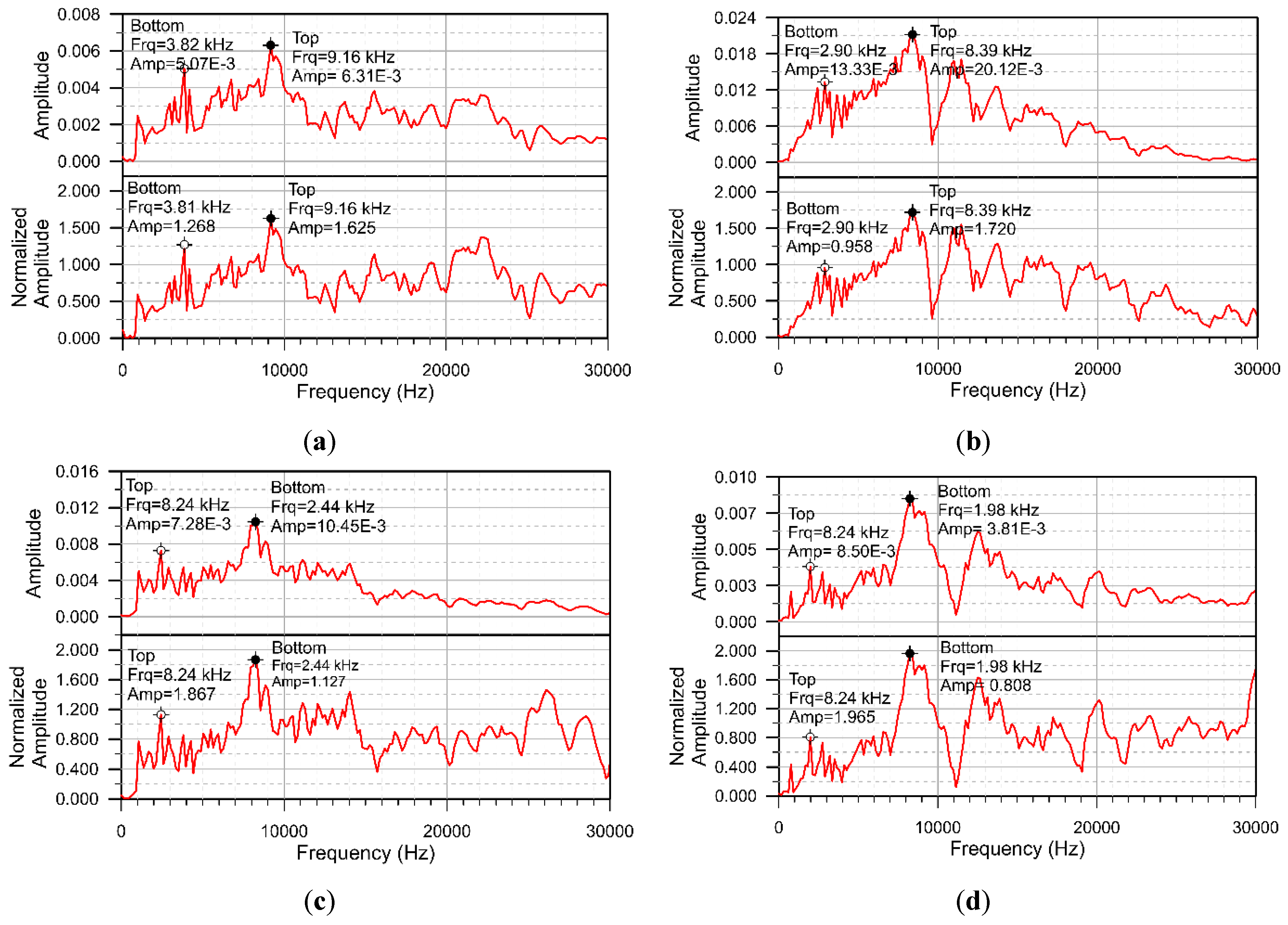
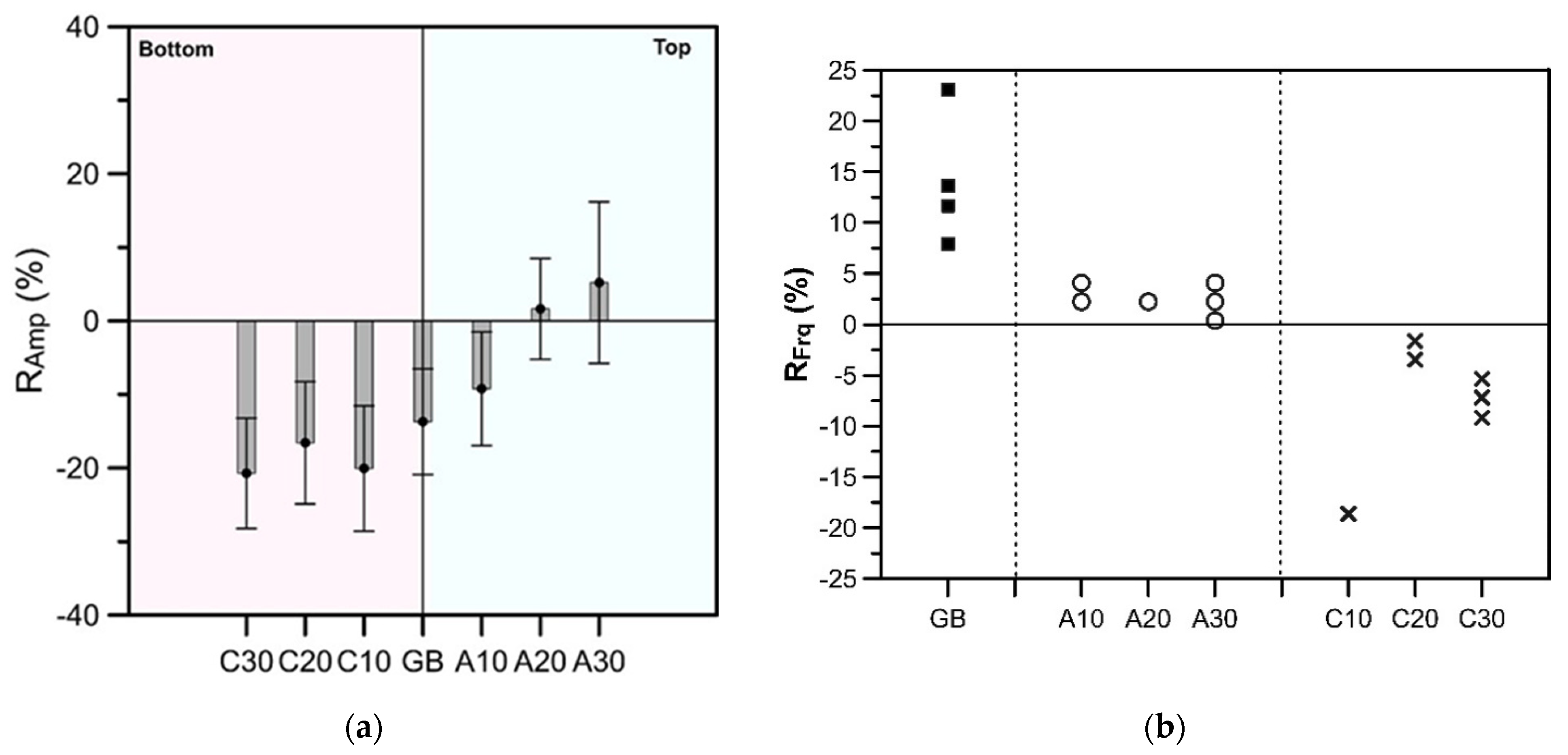
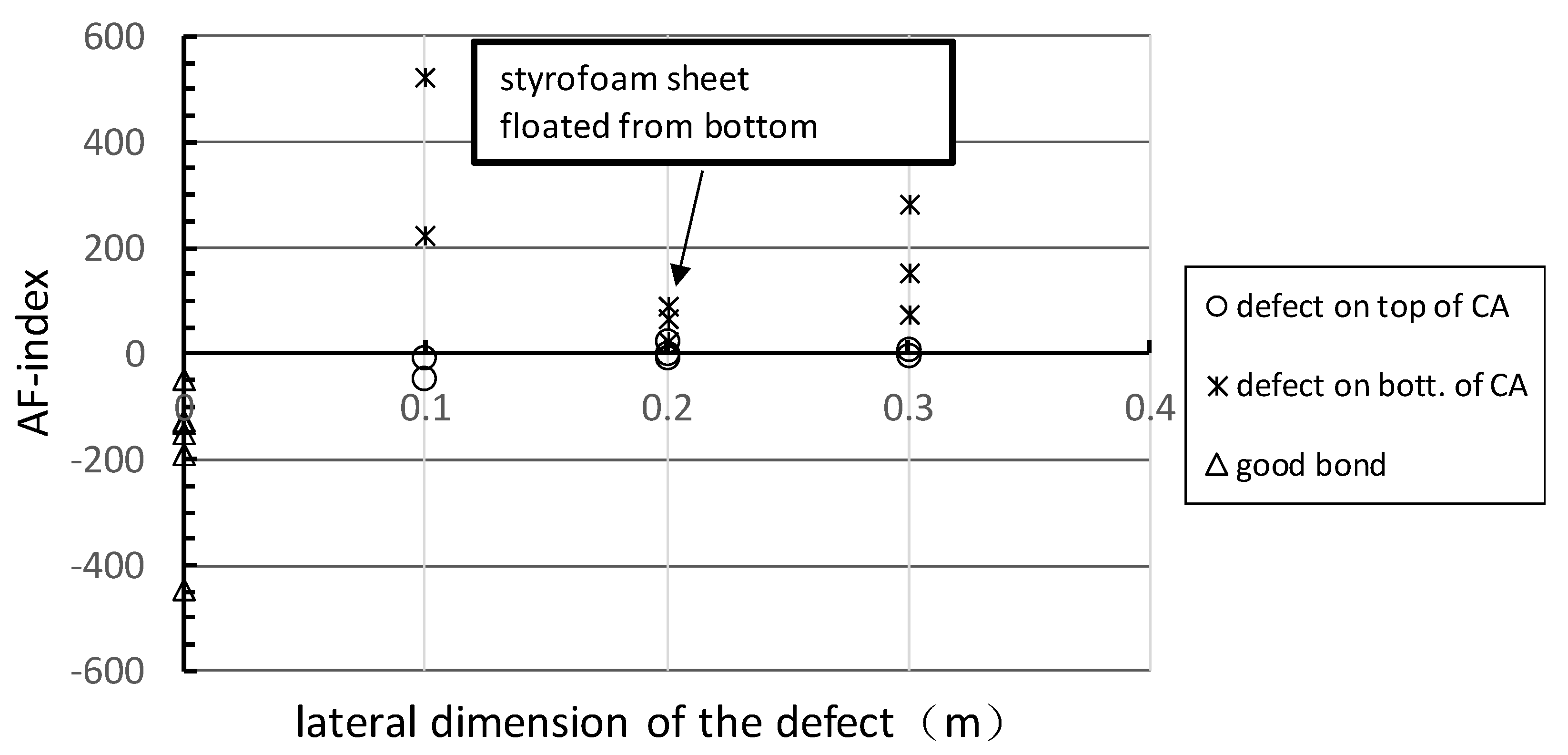
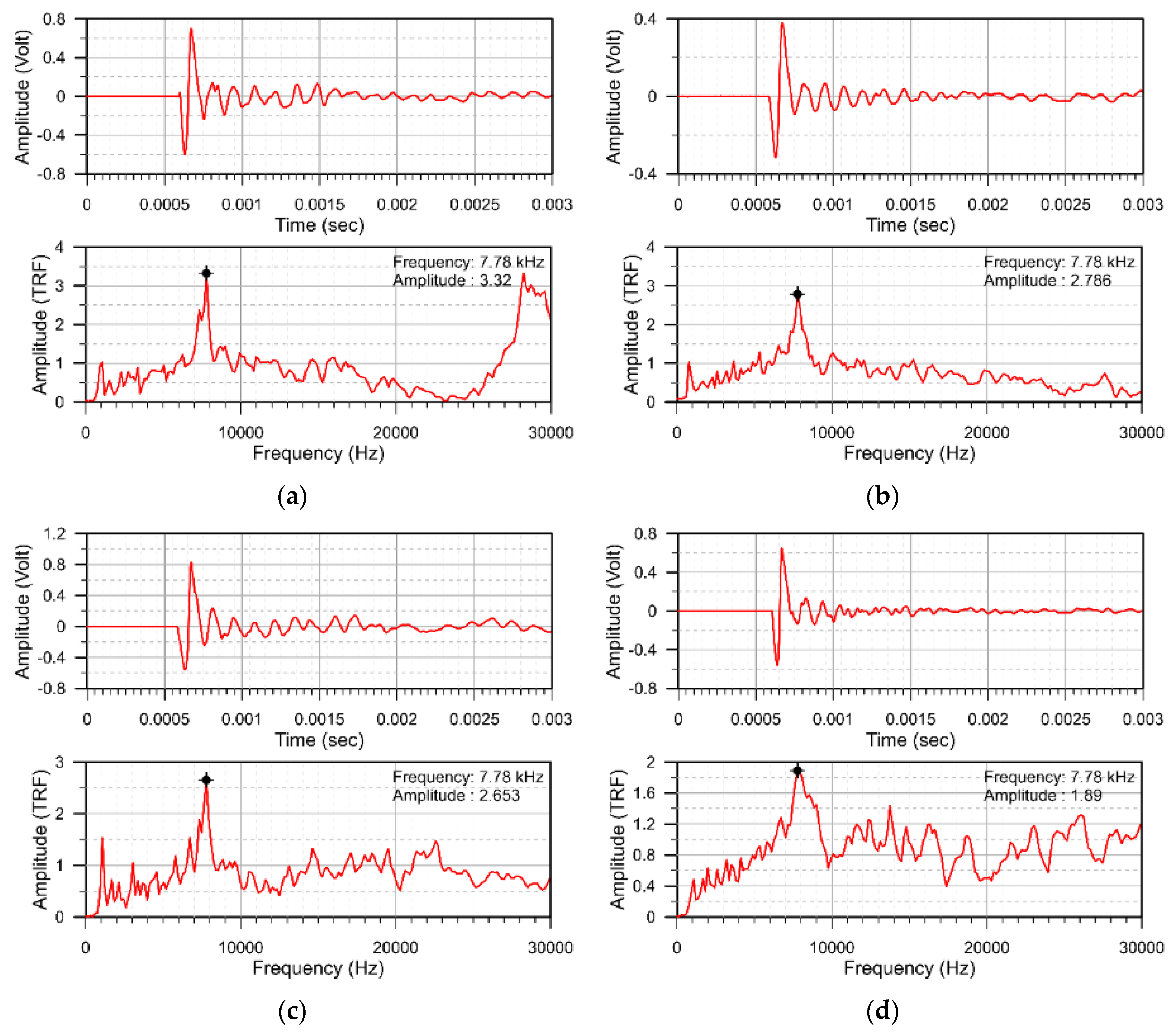
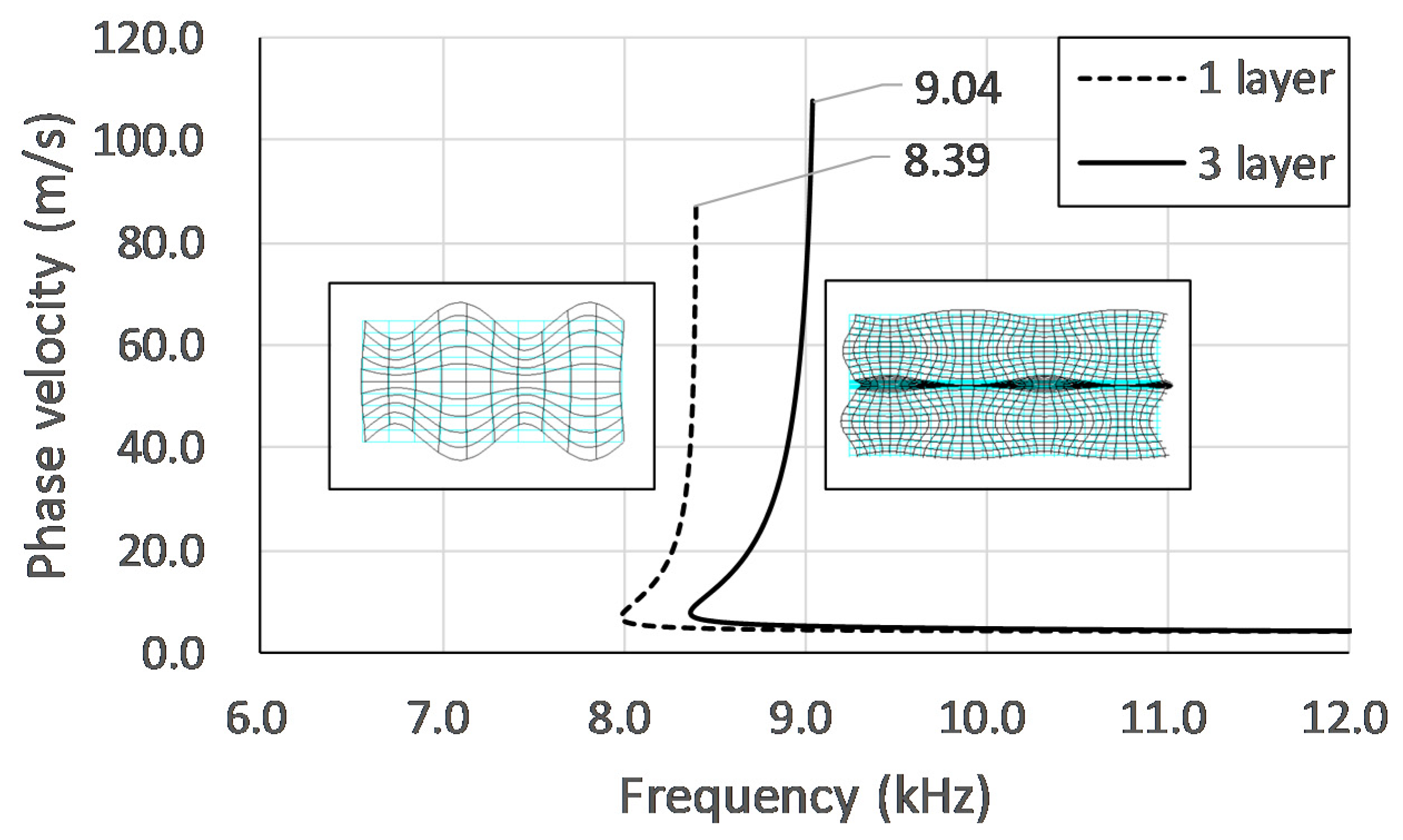
- For a track slab with a 36-mm-thick CA mortar layer:From the perspective of traditional IE, for the cases of good adhesion and peeling of the top concrete-CA layer interface, the thickness frequencies of the first concrete layer are all close to or higher than the value calculated by Equation (1) and decrease with the increase of the size of the defect. The higher thickness-frequency for the good bond case is caused by the higher cut-off frequency of the lamb wave mode excited by the impact-echo method [14]. Figure 14 shows the theoretical dispersion curves and the corresponding mode shapes for the S1 mode of a concrete slab and the ones for the 6th mode of the three layered composite plates. The dimensions and the material properties of the composite plate are the same as the present specimen. The one-layered concrete slab can be considered as the totally debonding situation. In Figure 14, the mode shapes for the slab and the top layer of the composite plate are very similar. The cut-off frequencies of the modes, which can be referred to as the thickness-frequency in the impact-echo spectrum, are 8.39 kHz for single-layered plate the 9.04 kHz for the three-layered plate [29]. In comparison, the thickness frequency shown in Figure 7d for A30 and Figure 7a for good bond case are 8.24 and 9.16 kHz, respectively. Although the peak frequency is slightly lower for the case with a defect, there may be local variations in the thickness of the concrete cover layer on-site, so the situation with defects above the CA layer may be mistaken for a good adhesion. For the cases where the defect is deeper in the CA mortar layer, the peak corresponding to the wave reflections between the defect and concrete surface is substantially lower than the one calculated by Equation (1) because the waves refracted into the CA layer and diffracted from the defect. This type of defect can be easily evaluated using the traditional IE. The thickness–frequency corresponding to the whole thickness of the composite plate decreases with the presence of a defect in the CA mortar layer because of the longer route for the wave propagation with the presence of the defect. However, this parameter may not be reliable for on-site inspection as the peak corresponding to the whole composite plate may not be obvious when the track plate is closely bonded with the foundation and the decreases in frequency may due to flaws in the concrete plates.From the perspective of the normalized IE, the normalized thickness amplitude of the case with the upper interfacial defect more than 0.2 m in size is mostly higher than the one with good adhesion and the lower interfacial defect and close to the one calculated by Equation (5). The dominant peak amplitudes become multiple and less distinct for the cases with defects on the bottom of CA mortar layer and with good adhesion because the waves dissipate into the CA layer. Because the traditional IE has the advantage of detecting the cracks on the lower surface of the CA mortar layer, and the normalized IE has the advantage of detecting the upper surface defects, in order to quickly and systematically estimate the defect status, the AF index is introduced. The AF-index is the product of the increase rates of the peak frequency and the increase rates of the normalized amplitude. The baseline frequency and amplitude can be calculated with the known upper concrete plate thickness, impactor and receiver spacing and concrete P wave velocity. For most well-bonded cases, the AF index is less than −50. For the defects with a lateral dimension equal to or greater than 0.1 m, AF is higher than −50 regardless of its position in the CA mortar layer.
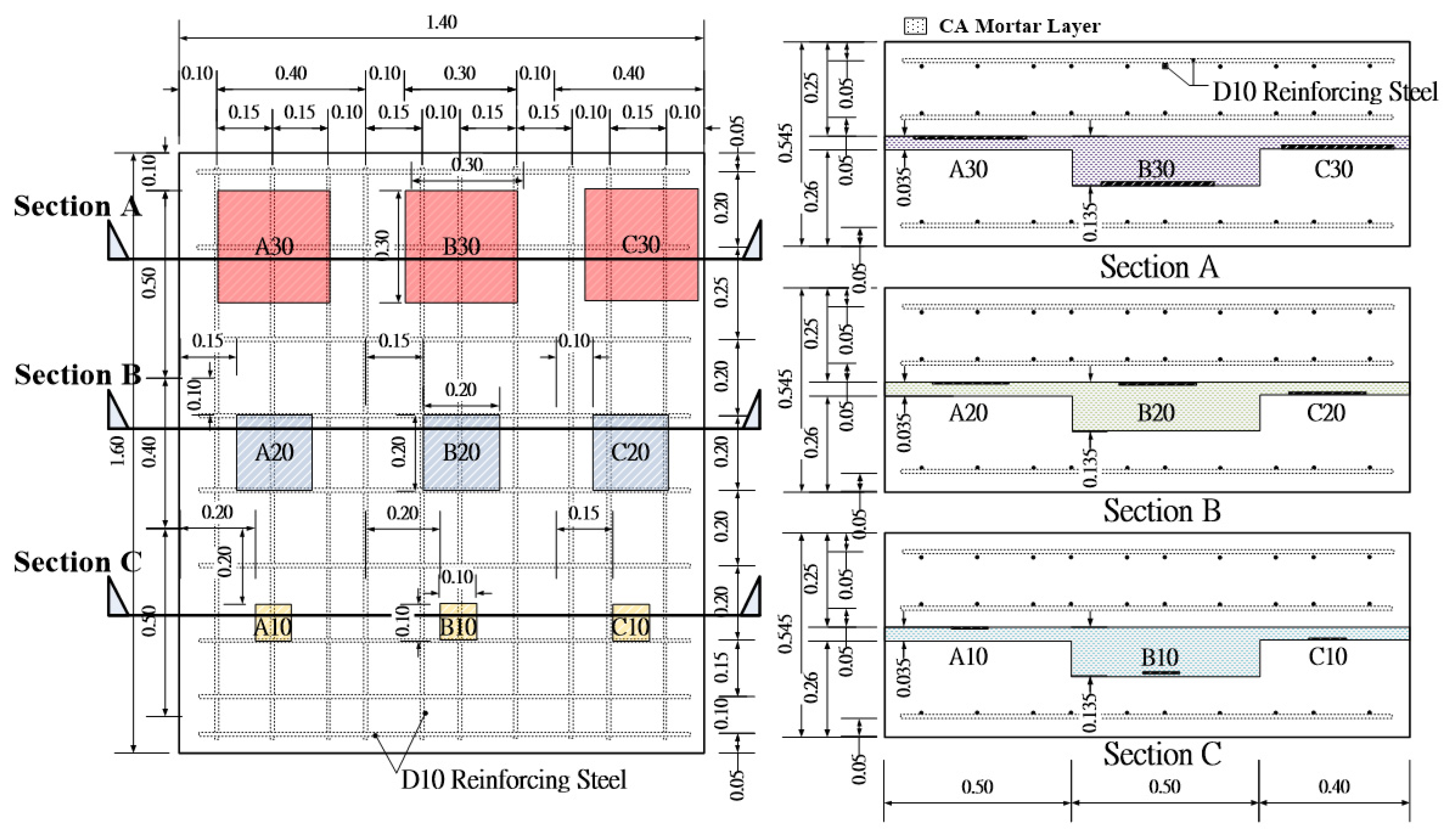
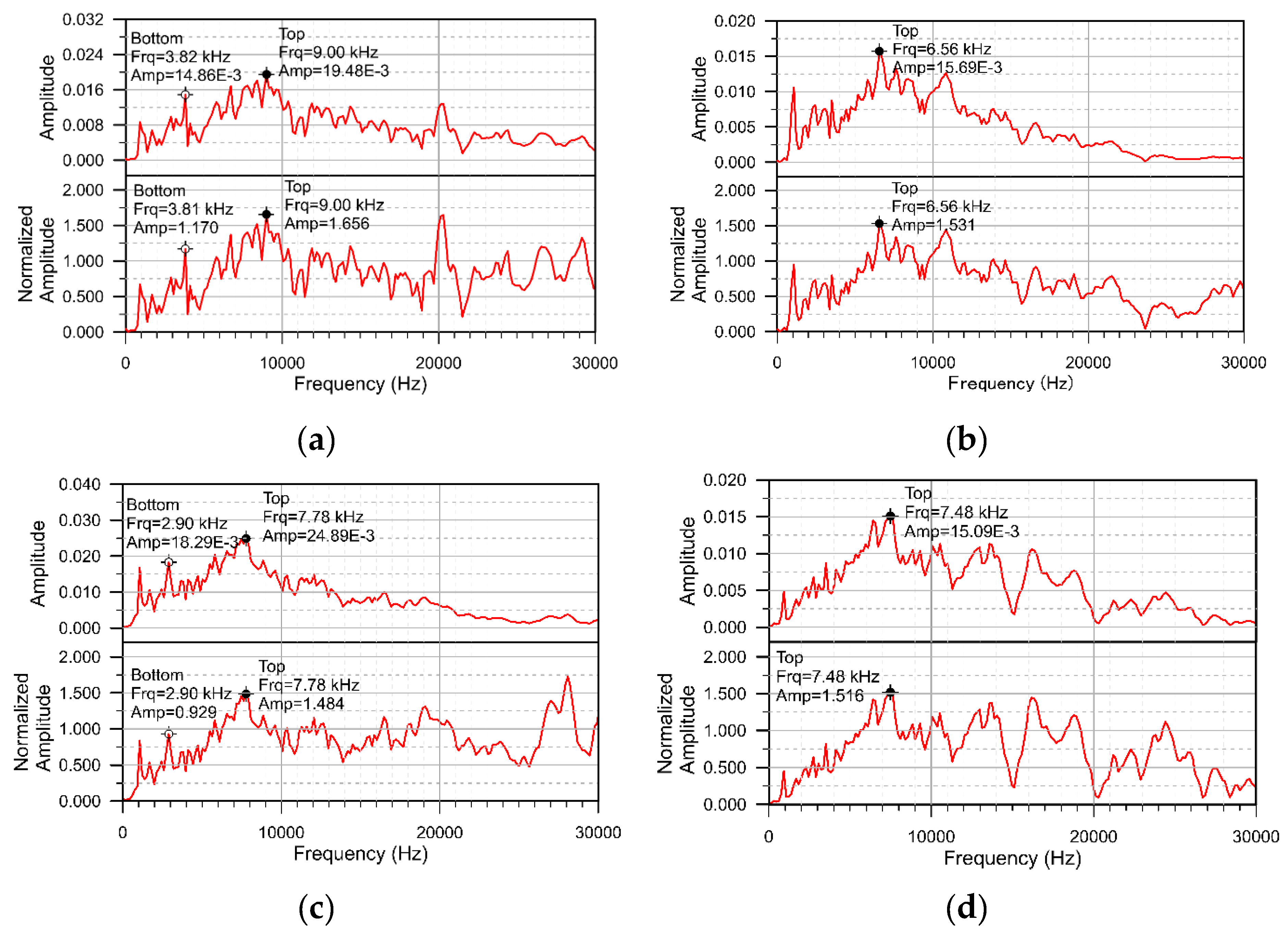
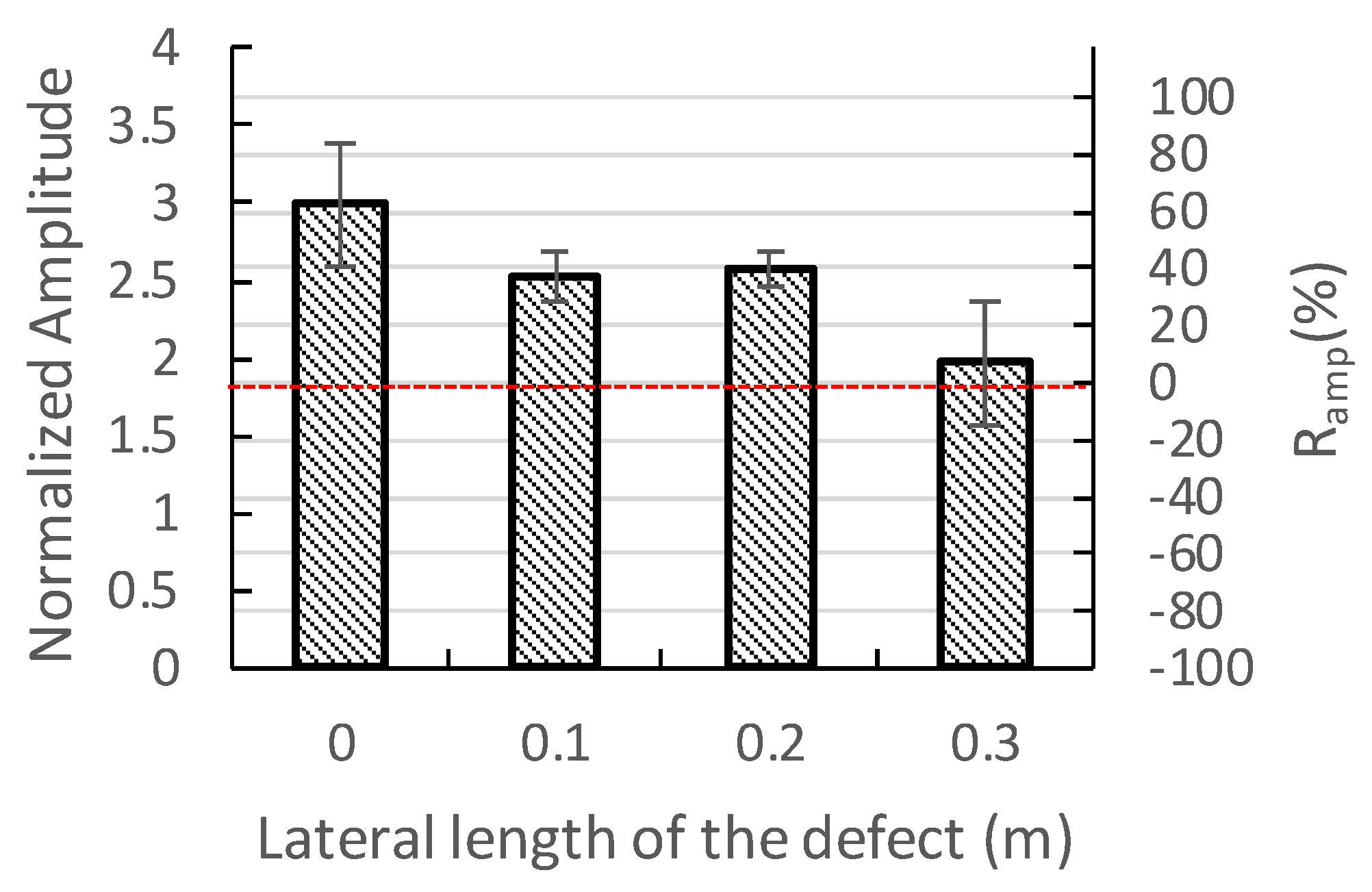
- For the CA layer with a thickness of 135 mm: Traditional IE is not suitable for detection in this case, because the peak frequency corresponding to the concrete overlay is the same for the good adhesion and the defect cases even for the case with 0.2 m defect locate on the top of CA mortar layer. Moreover, the peak corresponding to the whole thickness of the composite plate is missing as the stress waves cannot penetrate the thick CA mortar layer. However, the normalized amplitude of the dominant peak corresponding to the concrete overlay may be used as a parameter to identify the existence of cracks. In our experiment, for most of the good adhesion cases, the peak amplitude is about 60% higher than the baseline amplitude. For the cases with defect in the CA mortar layer with the lateral dimensions of 0.1 or 0.2 m, the peak amplitude is about 40% higher. For defects with a lateral dimension equal to or greater than 0.3 m, the amplitude is close to the baseline amplitude of the top concrete slab. Limited by the dimensions of the specimen, only three defects can be placed in Zone B. Hence, we choose B20 at the top and B10 and B30 at the bottom of the CA layer to obtain a broad picture of the characteristic response for the case with a defect inside the 135-mm-thick CA layer. Therefore, more rigorous experiments should be conducted in the future for the composite plate containing thick-CA mortar layer.
- There is a great chance that the thickness of CA mortar layer for the China railway track system falls within the range between 36 mm and 135 mm. According to this study, due to the change in the thickness of the CA mortar layer, there is a large difference in the characteristics of the IE amplitude spectrum. For the slab containing thicker CA mortar layer, there may not be a peak corresponding to the entire composite slab in the amplitude spectrum, so it is best to use only the main peak frequencies and normalized amplitudes related to the concrete overlay to evaluate defects in the mortar layer. The AF-index is a reliable indicator for slab with thinner mortar layer. For slabs with thick mortar layers, the change in the normalized amplitude of the main peak corresponding to the concrete overlay is the only indicator for defect assessment.
- Measuring the geometric parameters, such as the thickness of the concrete overlay, the CA mortar layer and the bottom concrete slab.
- Draw grid test points or sampling overlay surface, with the impactor–receiver distance 0.05 m. All the test points should be 0.2 m away from the side edge.
- Measuring the P-wave speed of the concrete overlay. Calculate the baseline frequency following Equation (1) and the baseline amplitude following Equation (5) with known thickness and P-wave speed of the concrete overlay.
- Calculate the baseline frequency of the composite plate following Equation (2) with the P-wave speed of the CA mortar layer equal to 1650 m/s as, according to the experience, Cp of CA mortar is usually between 1600–1700 m/s.
- Performing the IE tests on the test points and obtain the normalized amplitude spectra.
- Record the amplitudes and frequencies corresponding to the peak near the baseline frequency of the concrete overlay obtained from step 3 and the peak near the baseline frequency of the composite plate obtained from step 4.
- Calculate the Ramp, Rfrq, RBfrq and AF-index of the composite plate to assess the condition of the CA layer and perform the defect assessment within the CA mortar layer.
Author Contributions
Funding
Conflicts of Interest
References
- Wang, P.; Xu, H.; Chen, R. Effect of Cement Asphalt Mortar Debonding on Dynamic Properties of CRTS II Slab Ballastless Track. Adv. Mater. Sci. Eng. 2014, 2014, 1–8. [Google Scholar]
- Song, L.; Liu, H.; Cui, C.; Yu, Z.; Li, Z. Thermal Deformation and Interfacial Separation of a CRTS II slab Ballastless Track Multilayer Structure used in High-speed Railways Based on Meteorological Data. Constr. Build. Mater. 2020, 237, 1–16. [Google Scholar] [CrossRef]
- Zhu, S.; Wang, M.; Zhai, W.; Cai, C.; Zhao, C.; Zeng, D.; Zhang, J. Mechanical Property and Damage Evolution of Concrete Interface of Ballastless Track in High-Speed Railway: Experiment and Simulation. Constr. Build. Mater. 2018, 187, 460–473. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, G. Analysis of Early Gap Between Layers of CRTSII Slab Ballastless Track Structure. J. China Railw. Sci. 2013, 34, 1–7. [Google Scholar]
- Zhao, C.; Liu, J.; Mao, H.; Xaio, R. Interface Damage Analysis of CA mortar layer of the CRTS II Ballastless Slab Track under Temperature Gradient Loads. Sci. Sin. Technol. 2018, 48, 79–86. [Google Scholar] [CrossRef]
- Yuan, Q.; Guo, J.; Deng, D.; Xie, Y.; Zeng, Z.P. Experimental study on the Bonding Strength between High Modulus Cement Emulsified Asphalt for Slab Track and Concrete. J. Railw. Sci. Eng. 2013, 10, 40–44. (In Chinese) [Google Scholar]
- Rhazi, J.; Dons, O.; Kaveh, S. Detection of Fractures in Concrete by GPR Technique. In Proceedings of the 16th World Conference on NDT, Montreal, QC, Canada, 30 August–3 September 2004. [Google Scholar]
- Varnavina, A.V.; Khamzin, A.K.; Torgashov, E.V.; Sneed, L.H.; Goodwin, B.T.; Anderson, N.L. Data Acquisition and Processing Parameters for Concrete Bridge Deck Condition Assessment using Ground-Coupled Ground Penetrating Radar: Some Considerations. J. Appl. Geophys. 2015, 114, 123–133. [Google Scholar] [CrossRef]
- Kozlov, V.N.; Samokrutov, A.A.; Shevaldykin, V.G. Thickness measurements and flaw detection in concrete using ultrasonic echo method. Nondestruct. Test. Eval. 1997, 13, 73–84. [Google Scholar] [CrossRef]
- Sansalone, M.; Streett, W.B. Non-Destructive Evaluation of Concrete and Masonry. In Impact-Echo; Bullbrier Press: Ithaca, NY, USA, 1997. [Google Scholar]
- Cheng, C.; Sansalone, M. The Impact-Echo Response of Concrete Plates Containing Delaminations: Numerical, Experimental and Field Studies. RILEM Mater. Struct. 1993, 26, 274–285. [Google Scholar] [CrossRef]
- Cheng, C.C.; Sansalone, M. Effects on Impact-Echo Signals Caused by Steel Reinforcing Bars and Voids around Bars. ACI Mater. J. 1993, 90, 421–434. [Google Scholar]
- Foinquinos, R.; Roesset, J.M.; Stokoe, K.H. Response of pavement systems to dynamic loads imposed by nondestructive tests. Transp. Res. Rec. 1995, 1504, 57–67. [Google Scholar]
- Park, C.B.; Miller, R.D.; Xia, J. Multichannel analysis of surface waves. Geophysics 1993, 64, 800–808. [Google Scholar] [CrossRef]
- Ryden, N.; Lowe, M. Guided wave propagation in three-layer pavement structures. J. Acoust. Soc. Am. 2004, 116, 2902–2913. [Google Scholar] [CrossRef]
- Aouad, M.F. Evaluation of Flexible Pavements and Subgrades Using the Spectral-Analysis-Of-Surface-Waves (SASW) Method. Ph.D. Thesis, University of Texas, Austin, TX, USA, August 1993. [Google Scholar]
- Karray, M. The Use of Higher Modes in Surface Wave Testing. Conf. Pap. Geotech. Spec. Publ. 2010. [Google Scholar] [CrossRef]
- Lu, L.; Wang, C.; Zhang, B. Inversion of Multimode Rayleigh waves in the presence of a low-velocity layer: Numerical and laboratory study. Geophys. J. Int. 2007, 168, 1235–1246. [Google Scholar] [CrossRef]
- Haney, M.; Tsai, V. Perturbational and Nonperturbational Inversion of Rayleigh-Wave Velocities. Geophysics 2017, 82, 1–14. [Google Scholar] [CrossRef]
- Wardany, R.; Ballivy, G.; Gallias, J.; Saleh, K.; Rhazi, J. Assessment of Concrete Slab Quality and Layering by Guided and Surface Wave Testing. ACI Mater. J. 2007, 104, 268–275. [Google Scholar]
- Cheng, C.C.; Yu, C.P.; Chang, H.C. On the Feasibility of Deriving Transfer Function from Rayleigh Wave in the Impact-Echo Displacement Waveform. Key Eng. Mater. 2004, 270–273, 1484–1488. [Google Scholar] [CrossRef]
- Cheng, C.C.; Lin, Y.C.; Hsiao, C.M.; Chang, H.C. Evaluation of Simulated Transfer Functions of Concrete Plate Derived by Impact-Echo Method. NDT E Int. 2007, 40, 239–249. [Google Scholar] [CrossRef]
- Cheng, C.C.; Yu, C.P.; Liou, T. Evaluation of Interfacial Bond Condition between Concrete Plate-Like Structure and Substrate using the Simulated Transfer Function Derived by IE. NDT E Int. 2009, 40, 678–689. [Google Scholar] [CrossRef]
- Yu, C.P.; Cheng, C.C.; Lai, J. Application of Closed-Form Solution for Normal Surface Displacements on Impacted Half Space: Quantification of Impact-Echo Signals. IJASE 2006, 4, 127–150. [Google Scholar]
- Cheng, C.C.; Yu, C.P.; Wu, J.H.; Hsu, K.T.; Ke, Y.T. Evaluating the Integrity of the Reinforced Concrete Structure Repaired by Epoxy Injection Using Simulated Transfer Function of Impact-Echo Response. In Proceedings of the QNDE Conference, Baltimore, MD, USA, 21–26 July 2013. [Google Scholar]
- Graff, K.F. Wave Motion in Elastic Solid; Dover Publications Inc.: Mineola, NY, USA, 1991; pp. 356–369. [Google Scholar]
- Lin, Y.; Hsu, K.; Cheng, C. Evaluating Bond Quality at Steel/Concrete Interfaces using the Normalized Impact-echo Spectrum. Mod. Phys. Lett. B 2008, 22, 1001–1006. [Google Scholar] [CrossRef]
- Sun, L.; Chen, L.; Zelelew, H.H. Stress and Deflection Parametric Study of High-Speed Railway CRTS-II Ballastless Track Slab on Elevated Bridge Foundations. J. Transp. Eng. 2013, 139, 1224–1234. [Google Scholar] [CrossRef]
- Gibson, A.; Popovics, J.S. Lamb Wave Basis for Impact-Echo Method Analysis. J. Eng. Mech. ASCE 2005, 131, 438–443. [Google Scholar] [CrossRef]














© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ke, Y.-T.; Cheng, C.-C.; Lin, Y.-C.; Ni, Y.-Q.; Hsu, K.-T.; Wai, T.-T. Preliminary Study on Assessing Delaminated Cracks in Cement Asphalt Mortar Layer of High-Speed Rail Track Using Traditional and Normalized Impact–Echo Methods. Sensors 2020, 20, 3022. https://doi.org/10.3390/s20113022
Ke Y-T, Cheng C-C, Lin Y-C, Ni Y-Q, Hsu K-T, Wai T-T. Preliminary Study on Assessing Delaminated Cracks in Cement Asphalt Mortar Layer of High-Speed Rail Track Using Traditional and Normalized Impact–Echo Methods. Sensors. 2020; 20(11):3022. https://doi.org/10.3390/s20113022
Chicago/Turabian StyleKe, Ying-Tzu, Chia-Chi Cheng, Yung-Chiang Lin, Yi-Qing Ni, Keng-Tsang Hsu, and Tai-Tung Wai. 2020. "Preliminary Study on Assessing Delaminated Cracks in Cement Asphalt Mortar Layer of High-Speed Rail Track Using Traditional and Normalized Impact–Echo Methods" Sensors 20, no. 11: 3022. https://doi.org/10.3390/s20113022
APA StyleKe, Y.-T., Cheng, C.-C., Lin, Y.-C., Ni, Y.-Q., Hsu, K.-T., & Wai, T.-T. (2020). Preliminary Study on Assessing Delaminated Cracks in Cement Asphalt Mortar Layer of High-Speed Rail Track Using Traditional and Normalized Impact–Echo Methods. Sensors, 20(11), 3022. https://doi.org/10.3390/s20113022