Performance Evaluations of PC5-based Cellular-V2X Mode 4 for Feasibility Analysis of Driver Assistance Systems with Crash Warning

Abstract
1. Introduction
2. Related Works
3. System Model and Characteristics
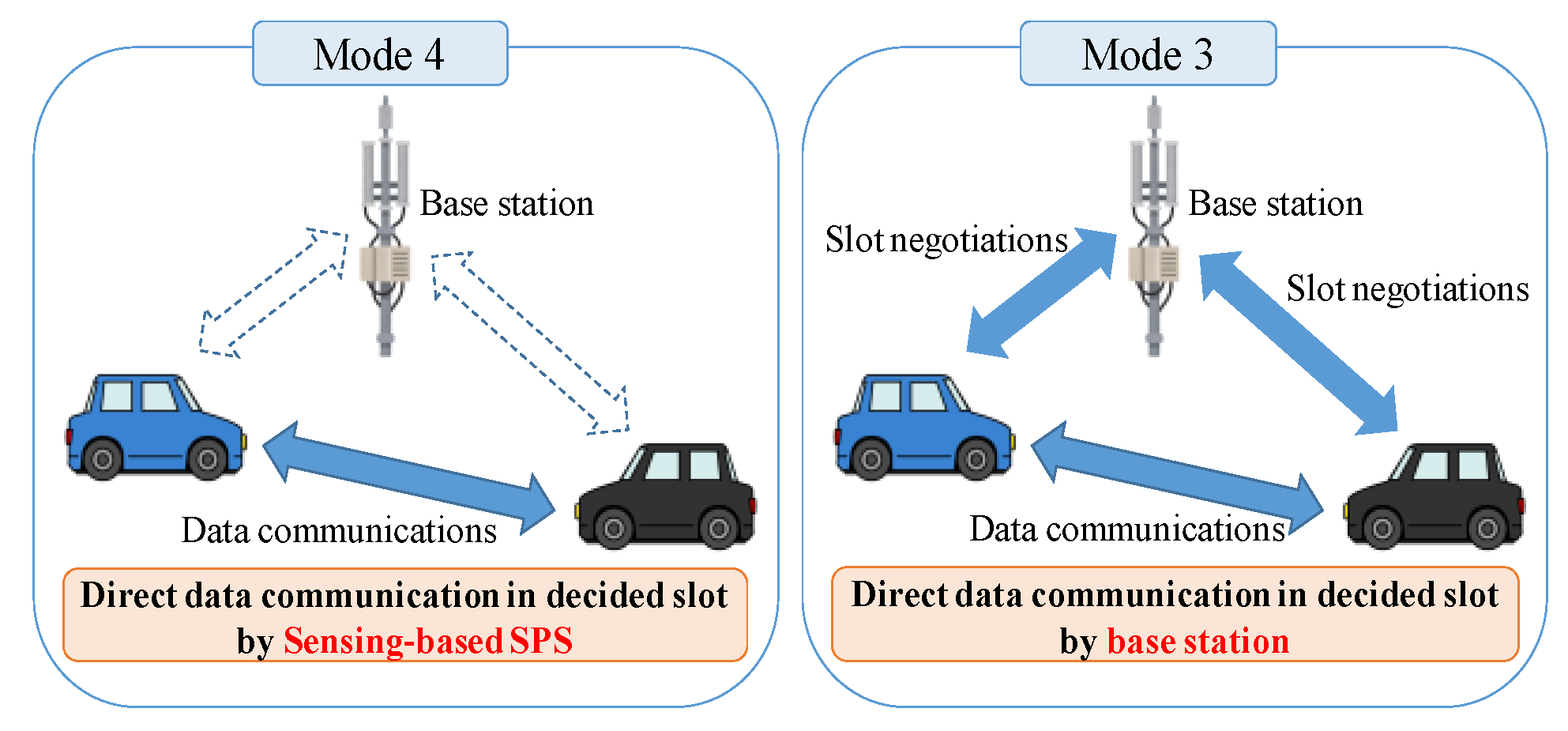
3.1. Mode 4 Mechanism
- ⋅
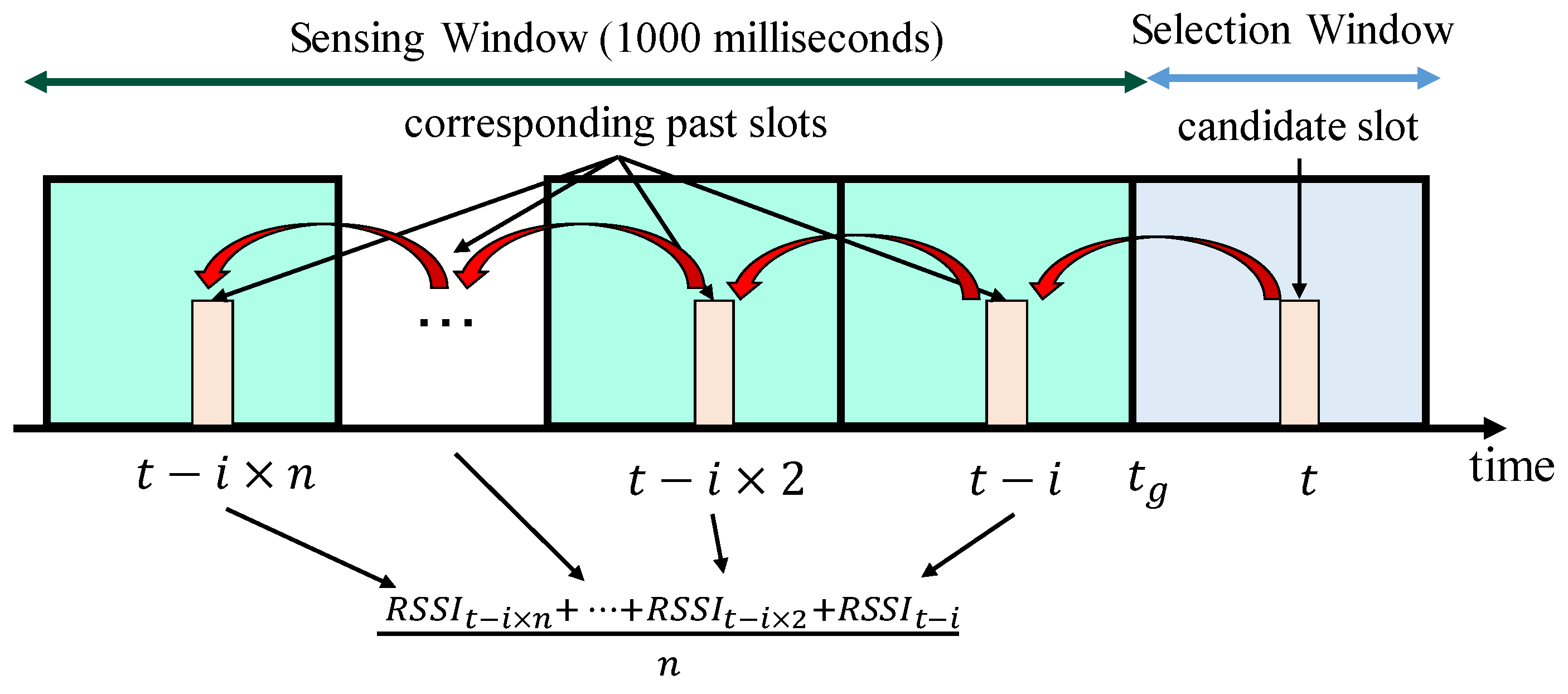
- Slot selection based on history: In order to select a good slot for the transmissions, each node uses the history of past slot utilization and estimates the interference of each future slot. The history includes the sensing information of all the slots, despite it transmitting or not; that is, each node senses all the slots. This sensing information includes the received signal, the remaining number of slot utilization [7] (related to the next feature), and others.
- ⋅
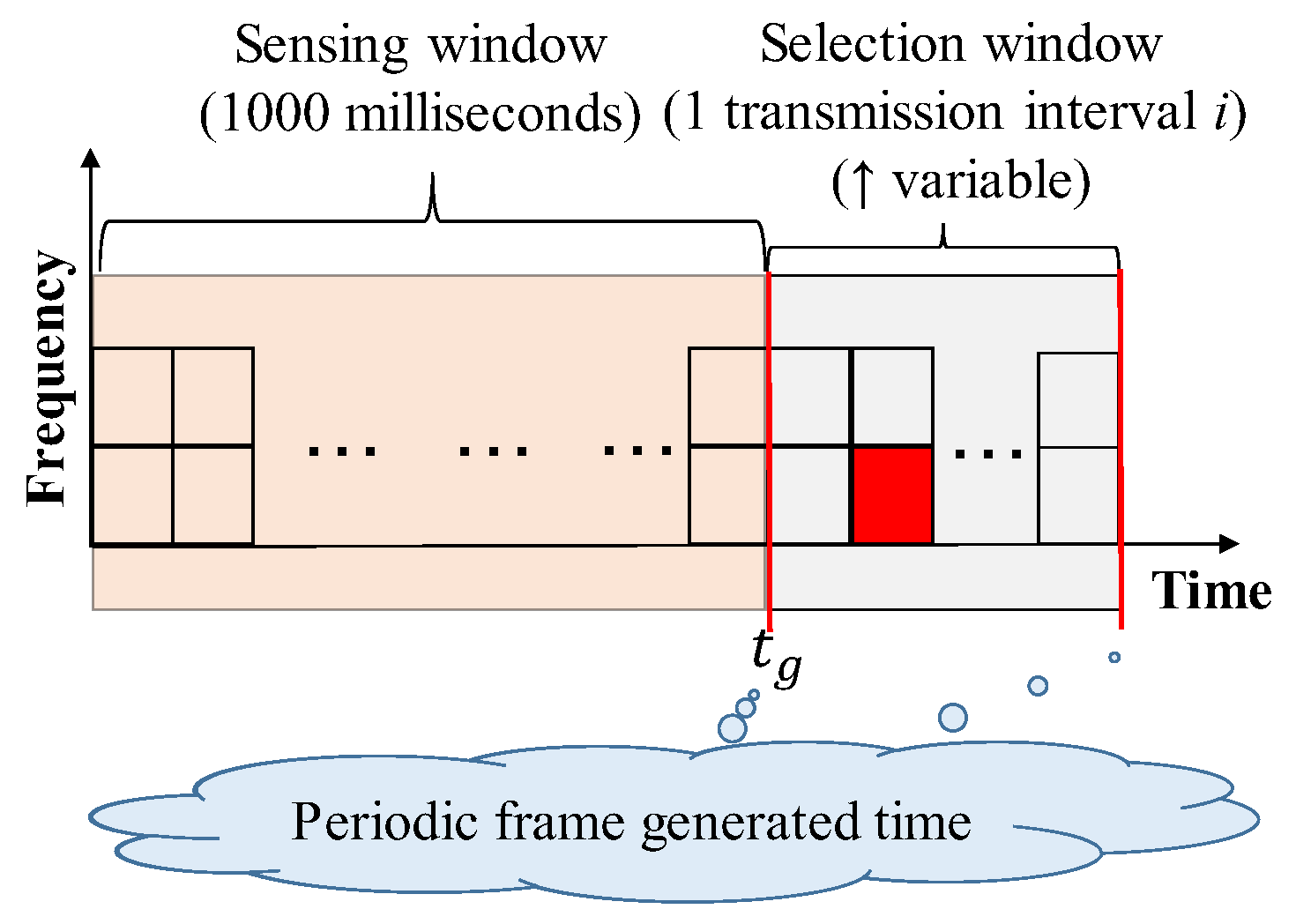
- Semi-persistent slot utilization: In order to boost the above estimation accuracy of the interference pattern, each node uses the same slot in a semi-persistent manner; in other words, each node successively uses the same frequency resource at specific times.
- –
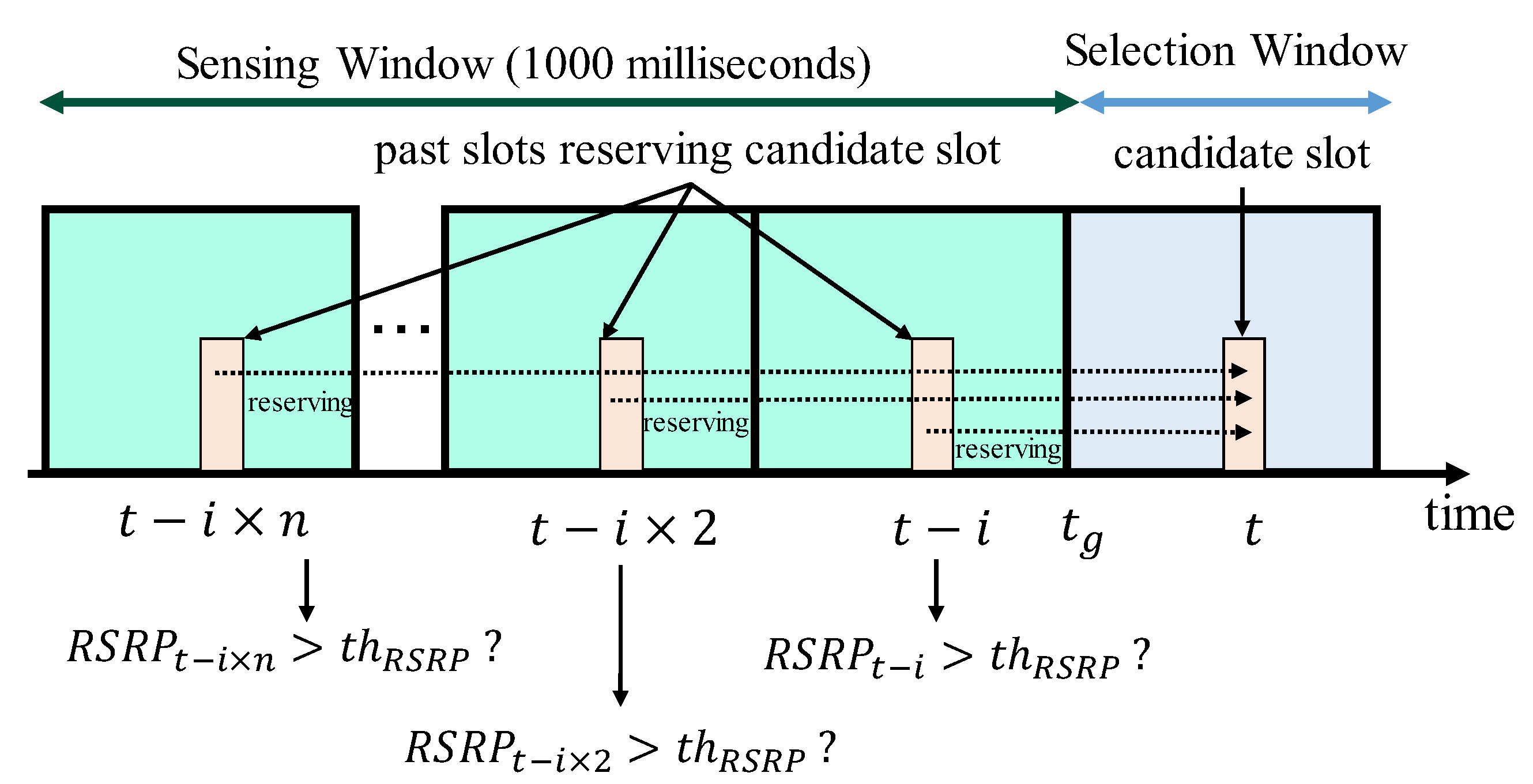
- The first condition is that one or more nodes reserve the candidate slot in the sensing window. Each node refers to the remaining number of sensing information in the past slot. Note that the frame must be decoded successfully.
- –
- The second condition is that the RSRP of the above slots, reserved by the other nodes, is higher than the threshold. Note that, when the same transmitter reserves a transmission slot, the RSRP of the most recent slot is referred to.
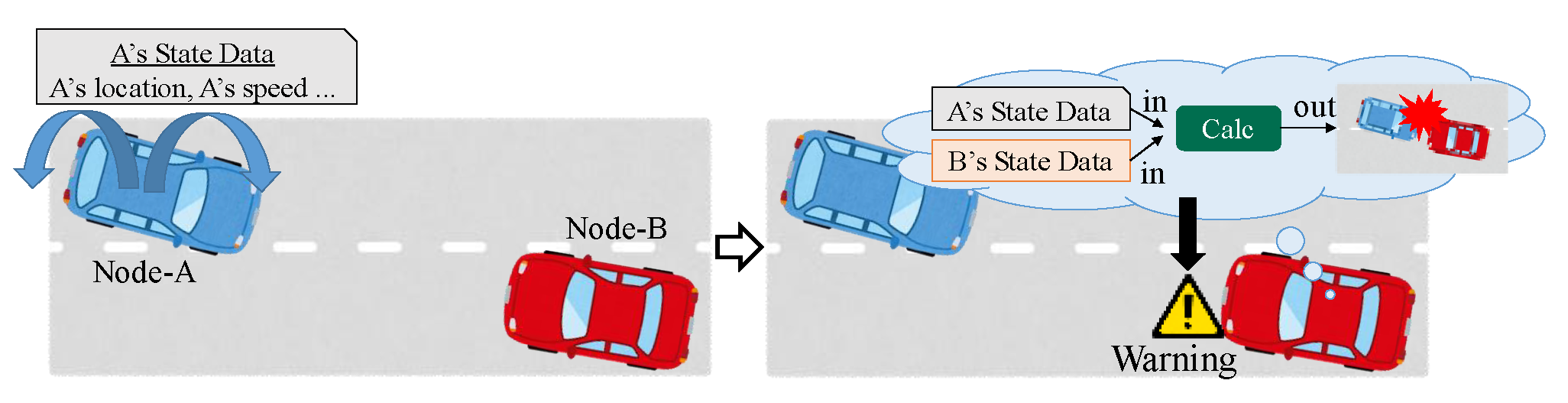
3.2. Crash Warning System
3.2.1. How to Warn
3.2.2. QoS Requirements
- ⋅
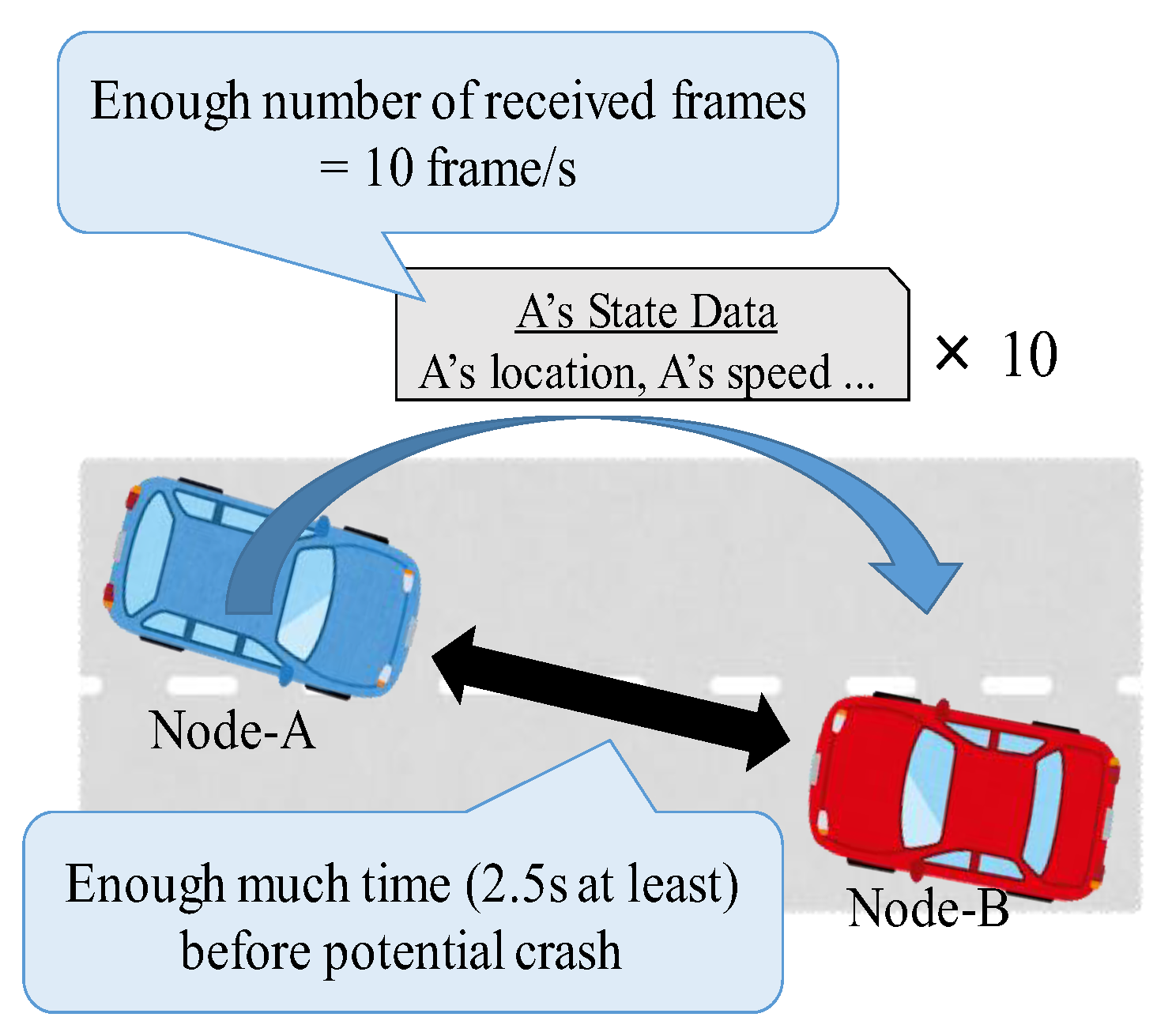
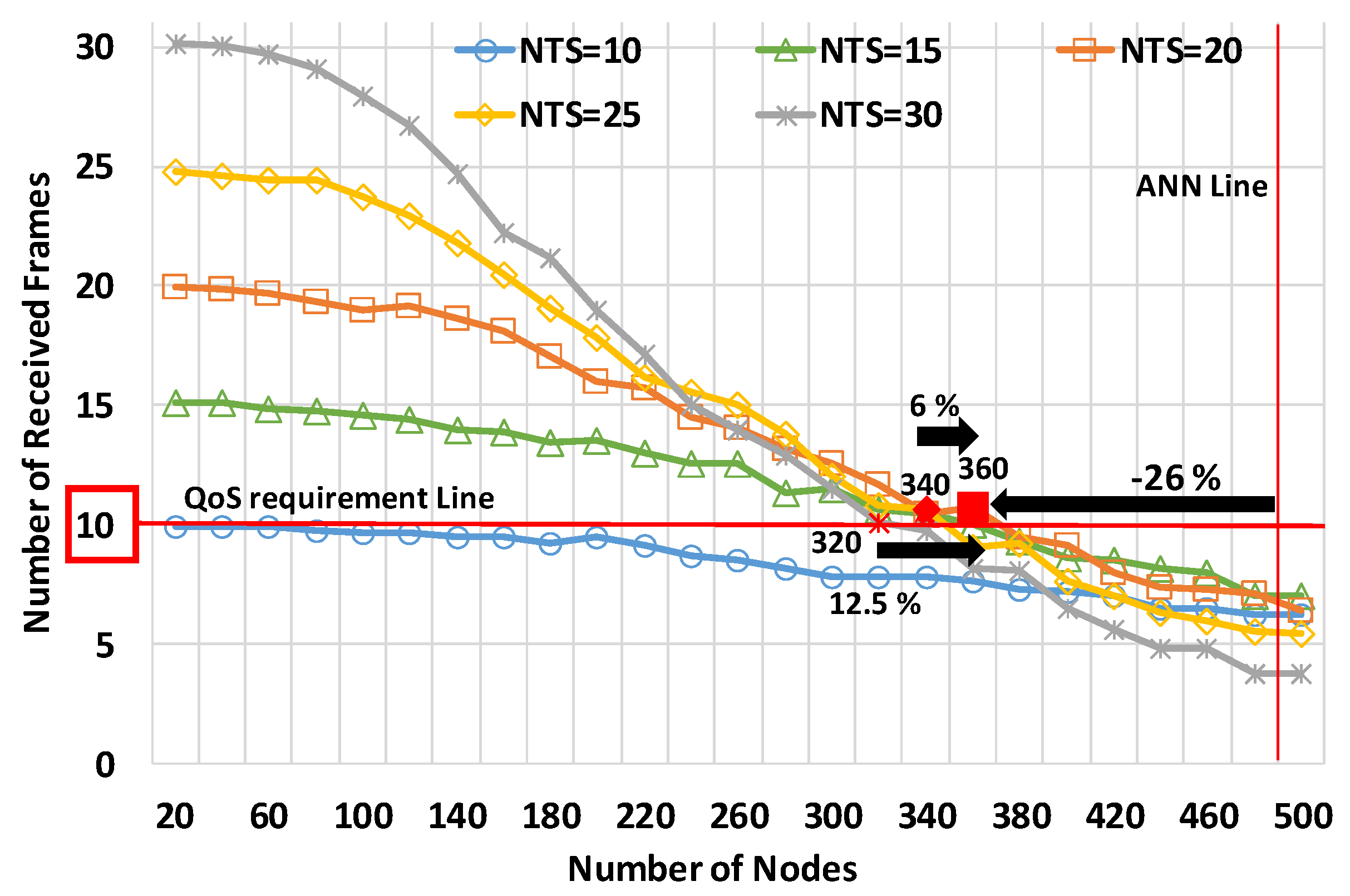
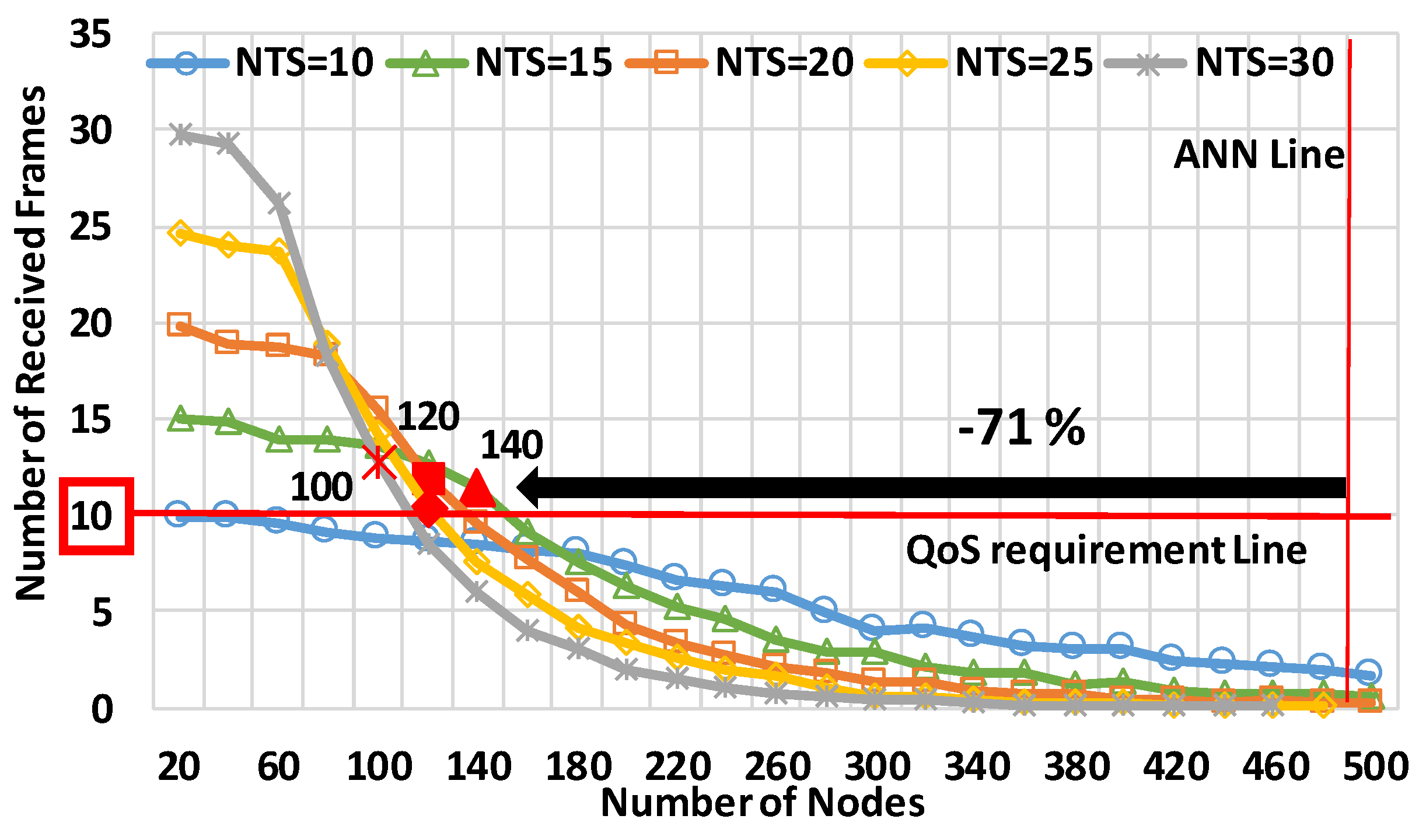
- The number of received frames: Potential crash nodes must receive ten frames/s from the corresponding potential crash nodes. Reference [3] standardizes the number of transmissions to 10 frames/s. We interpret this specification as a requirement concerning the number of received frames because receiving all of the transmitted frames is typically necessary and important in warning of potential crashes; in other words, the nodes need to obtain enough information to predict their future location in a real-time manner accurately. In Figure 6, node-B needs to receive at least ten numbers of node-A’s frames per second.
- ⋅
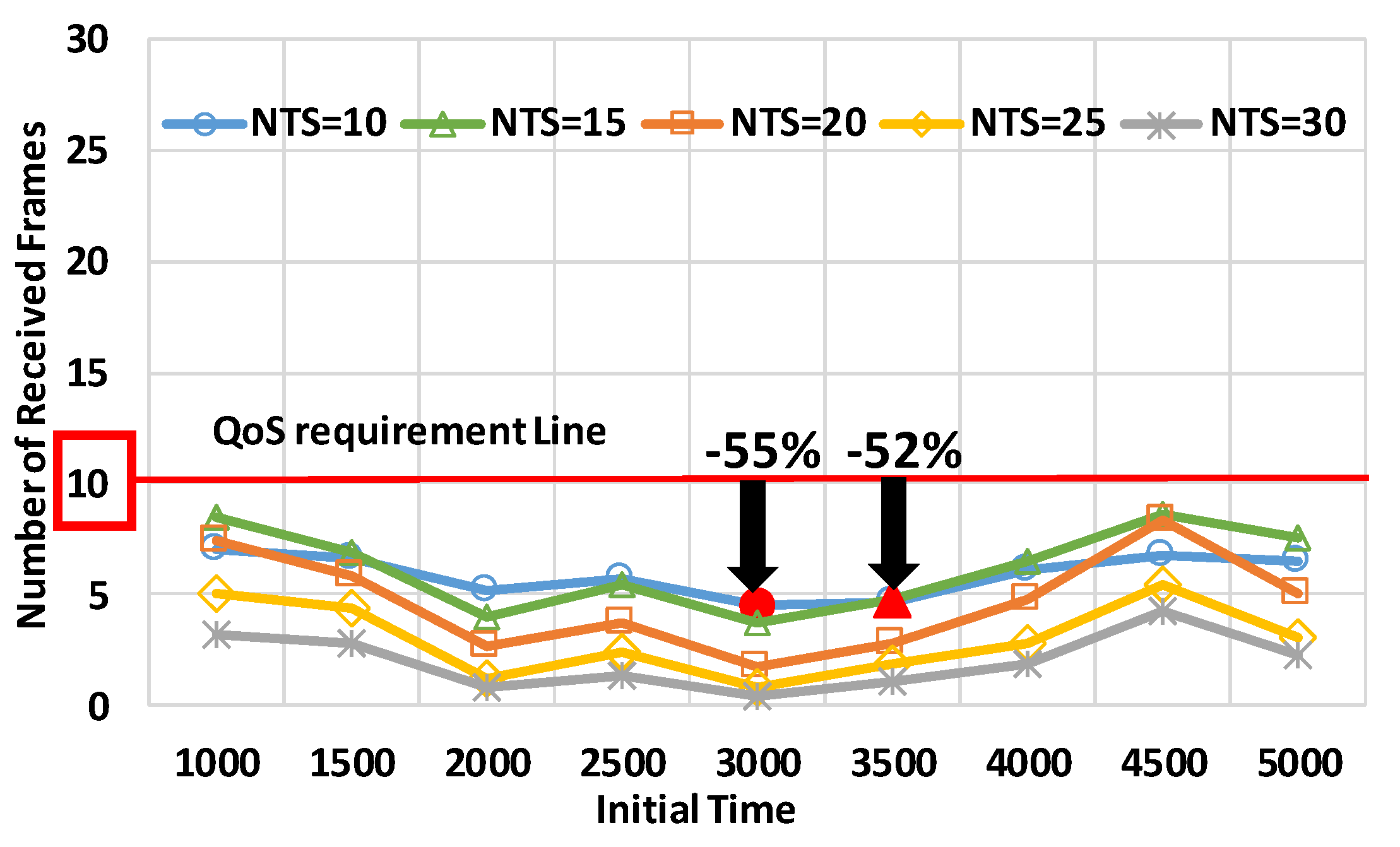
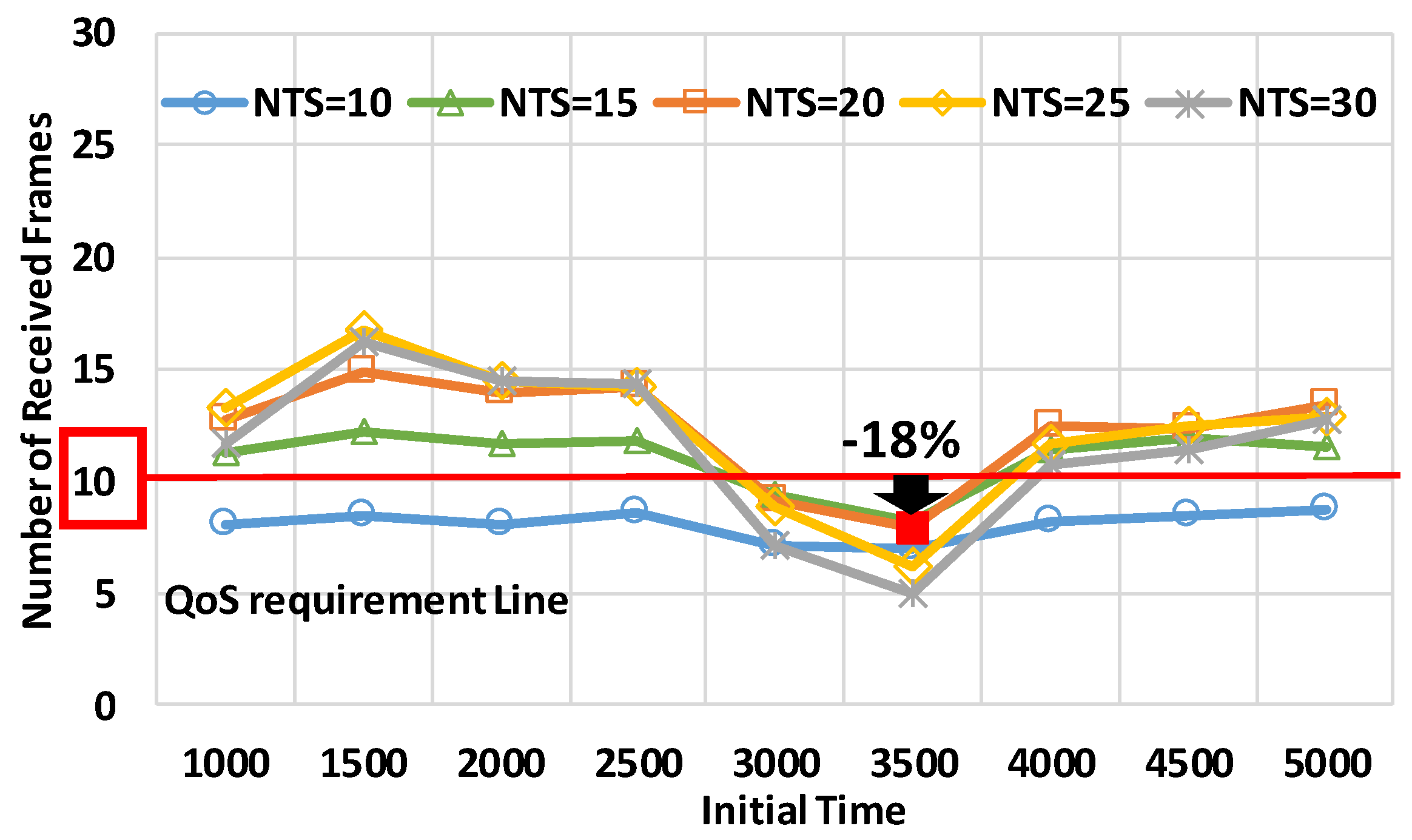
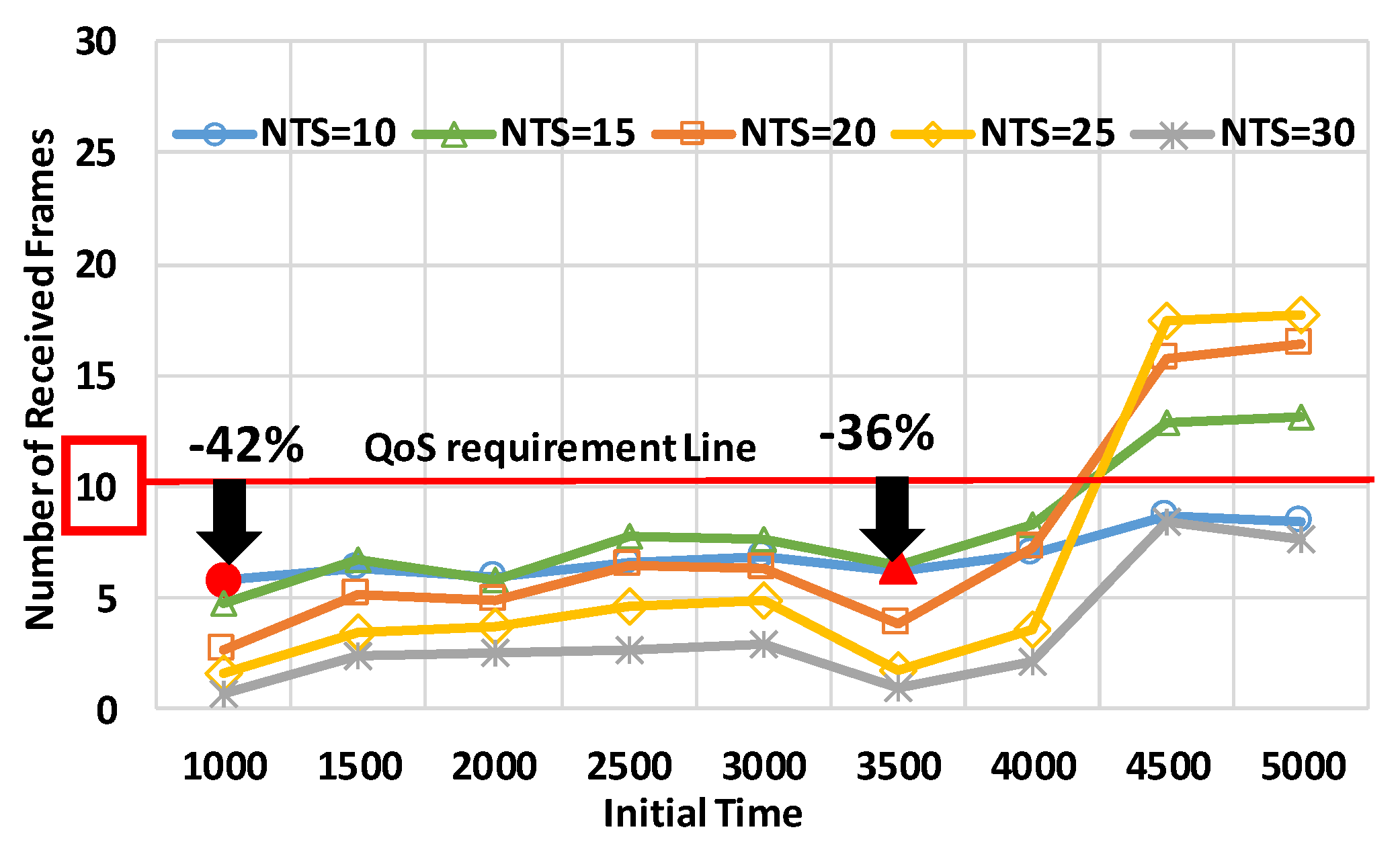
- Warning period: This is the period during which the system can safely warn the user. Specifically, this period is during 2.5–9.5 s prior to potential crashes [4]; in other words, the time-to-crash is within 2.5–9.5 s. To warn at a time-to-crash of 2.5 s, which is the last warning opportunity, potential crash nodes must satisfy the above requirement during the time-to-crash of 2.5–3.5 s. In Figure 6, node-B needs to warn node-A during this period.
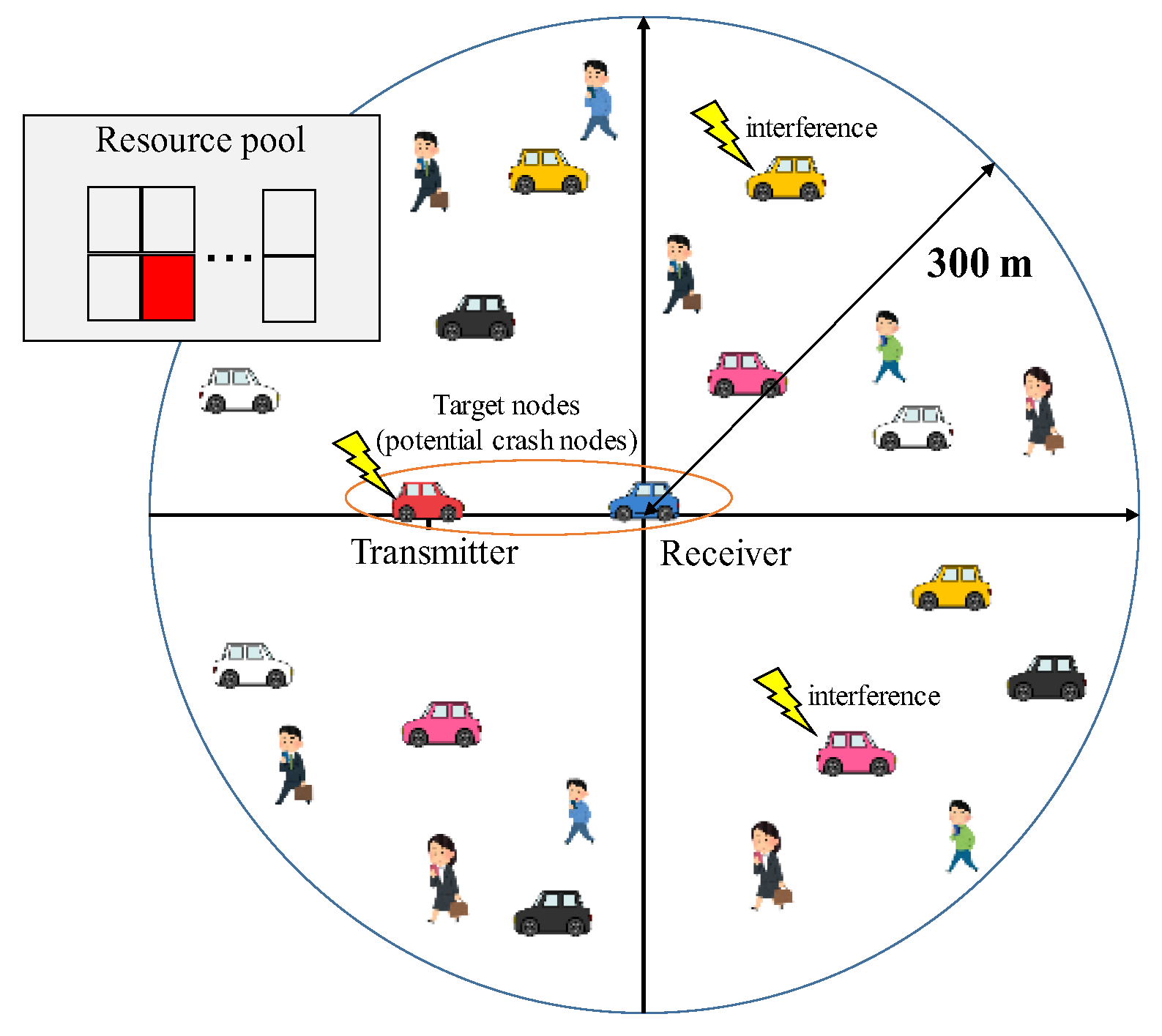
3.3. Crash Scenarios and Congestion Problem
- –
- Crowded intersection scenarios: crashes in crowded intersections.
- –
- High-speed scenarios: crashes with high-speed nodes, like emergency vehicles.
3.3.1. Crowded Intersection Scenarios
3.3.2. High-Speed Scenarios
4. Evaluation Model
4.1. Crash Scenarios and Performance Metrics
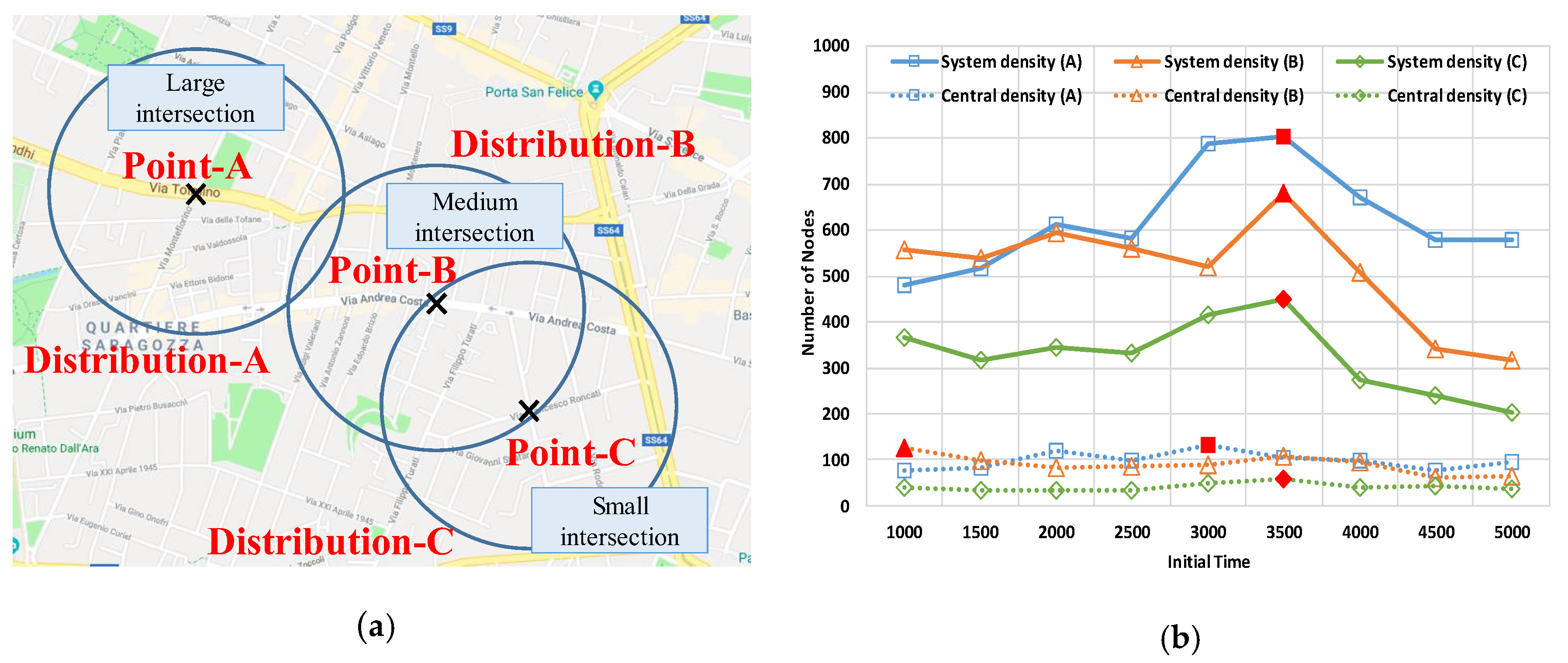
4.2. Bologna Data and Realistic Node Distribution Models
4.3. Wireless Parameters
5. Number of Received Frames and NAC in Two Crash Scenarios
5.1. Crowded Intersection Scenarios
5.1.1. Uniform Node Distribution Models
5.1.2. Realistic Node Distribution Models
5.2. High-Speed Scenarios
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xiong, Z.; Sheng, H.; Rong, W.; Cooper, D.E. Intelligent transportation systems for smart cities: A progress review. Sci. China Inf. Sci. 2012, 55, 2908–2914. [Google Scholar] [CrossRef]
- ElBatt, T.; Goel, S.K.; Holland, G.; Krishnan, H.; Parikh, J. Cooperative collision warning using dedicated short range wireless communications. In Proceedings of the 3rd International Workshop on Vehicular Ad Hoc Networks, Los Angeles, CA, USA, 29 September 2006. [Google Scholar]
- U.S. Department of Transportation Announces Decision to Move Forward with Vehicle-to-Vehicle Communication Technology for Light Vehicles. Available online: https://www.auto-talks.com/u-s-department-transportation-announces-decision-move-forward-vehicle-vehicle-communication-technology-light-vehicles/ (accessed on 1 May 2020).
- Bezzina, D. Light Vehicle Platform Update. In Proceedings of the IVBSS 2008 Public Meeting, Ypsilanti, MI, USA, 10–11 April 2008. [Google Scholar]
- Hirai, T. Node Clustering Communication Method with Member Data Estimation to Improve QoS of V2X Communications for Driving Assistance with Crash Warning. IEEE Access 2019, 7, 37691–37707. [Google Scholar] [CrossRef]
- 3GPP. Evolved Universal Terrestrial Radio Access (E-UTRA), Physical Layer Procedures. 3GPP TS 36.213 version 14.2.0 Release 14; 2017. Available online: http://www.etsi.org/standards-search (accessed on 1 May 2020).
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Vehicular Communications: A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Bazzi, A.; Member, S. Study of the Impact of PHY and MAC Parameters in 3GPP C-V2V Mode 4. IEEE Access 2018, 6, 71685–71698. [Google Scholar] [CrossRef]
- Gonzalez-Martin, M.; Sepulcre, M.; Molina-Masegosa, R.; Gozalvez, J. Analytical Models of the Performance of C-V2X Mode 4 Vehicular Communications. IEEE Trans. Veh. Technol. 2018, 68, 1155–1166. [Google Scholar] [CrossRef]
- Park, Y.; Weon, S.; Hwang, I.; Lee, H.; Kim, J.; Member, S. Spatial Capacity of LTE-based V2V Communication. In Proceedings of the 2018 International Conference on Electronics, Information, and Communication (ICEIC), Honolulu, HI, USA, 24–27 January 2018; pp. 1–4. [Google Scholar]
- Nabil, A.; Marojevic, V.; Kaur, K.; Dietrich, C. Performance Analysis of Sensing-Based Semi-Persistent Scheduling in C-V2X Networks. arXiv 2018, arXiv:1804.10788. [Google Scholar]
- Toghi, B.; Mughal, M.O.; Mahjoub, H.N.; Fallah, Y.P.; Rao, J.; Das, S. Multiple Access in Cellular V2X: Performance Analysis in Highly Congested Vehicular Networks. arXiv 2018, arXiv:1809.02678. [Google Scholar]
- He, J.; Tang, Z.; Fan, Z.; Zhang, J. Enhanced collision avoidance for distributed LTE vehicle to vehicle broadcast communications. IEEE Commun. Lett. 2018, 22, 630–633. [Google Scholar] [CrossRef]
- Cecchini, G.; Bazzi, A.; Masini, B.M.; Zanella, A. Performance comparison between IEEE 802.11p and LTE-V2V in-coverage and out-of-coverage for cooperative awareness. In Proceedings of the 2017 IEEE Vehicular Networking Conference (VNC), Torino, Italy, 27–29 November 2017; pp. 109–114. [Google Scholar]
- Bazzi, A.; Masini, B.M.; Zanella, A. How many vehicles in the LTE-V2V awareness range with half or full duplex radios? In Proceedings of the 2017 15th International Conference on ITS Telecommunications (ITST), Warsaw, Poland, 29–31 May 2017; pp. 1–6. [Google Scholar]
- Vukadinovic, V.; Bakowski, K.; Marsch, P.; Garcia, I.D.; Xu, H.; Sybis, M.; Sroka, P.; Wesolowski, K.; Lister, D.; Thibault, I. 3GPP C-V2X and IEEE 802.11p for Vehicle-to-Vehicle Communications in Highway Platooning Scenarios. Ad Hoc Netw. 2018, 74, 17–29. [Google Scholar] [CrossRef]
- Takeshi, H.; Tutomu, M. NOMA Concept for PC5-based Cellular-V2X mode 4 in Crash Warning System. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference, Honolulu, HI, USA, 22–25 September 2019. [Google Scholar]
- Takeshi, H.; Tutomu, M. Performance Characteristics of Sensing-based SPS of PC5-based C-V2X Mode 4 in Crash Warning Application under Congestion. In Proceedings of the IEEE ITSC 2019, Auckland, New Zealand, 27–30 October 2019. [Google Scholar]
- Takeshi, H.; Tutomu, M. Practical Performance of Simple C-V2X Mode 4 using NOMA for Driver Assistant System with Crash Warning. In Proceedings of the 6th International Workshop on Smart Wireless Communications, Camden, NJ, USA, 4–6 November 2019. [Google Scholar]
- Kawasaki, R.; Onishi, H.; Murase, T. Performance evaluation on V2X communication with PC5-based and Uu-based LTE in Crash Warning Application. In Proceedings of the IEEE GCCE 2017, Nagoya, Japan, 24–27 October 2017; pp. 1–2. [Google Scholar]
- Bieker, L.; Krajzewicz, D.; Morra, A.P.; Michelacci, C.; Cartolano, F. Traffic simulation for all: A real world traffic scenario from the city of Bologna. Lect. Notes Control Inf. Sci. 2015, 13, 47–60. [Google Scholar]
- Bedogni, L.; Gramaglia, M.; Vesco, A.; Fiore, M.; Härri, J.; Ferrero, F. The Bologna ringway dataset: Improving road network conversion in SUMO and validating urban mobility via navigation services. IEEE Trans. Veh. Technol. 2015, 64, 5464–5476. [Google Scholar] [CrossRef]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO–Simulation of Urban Mobility. In Proceedings of the SIMUL 2011, The Third International Conference on Advances in System Simulation, Barcelona, Spain, 23–28 October 2010. [Google Scholar]
- Hadzi-Velkov, Z.; Spasenovski, B. Capture Effect in IEEE 802.11 Basic Service Area under Influence of Rayleigh Fading and Near/Far Effect. In Proceedings of the 13th IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Lisboa, Portugal, 18 September 2002. [Google Scholar]
- Li, X.; Zeng, Q.-A. Capture effect in the IEEE 802.11 WLANs with rayleigh fading, shadowing, and path loss. In Proceedings of the 2006 IEEE International Conference on Wireless and Mobile Computing, Networking and Communications, Montreal, QC, Canada, 19–21 June 2006. [Google Scholar]
- Juha, M.; Pekka, K.; Lassi, H.; Tommi, J.; Essi, S.; Esa, K. Milan, D5.3: WINNER+ Final Channel Models, Wireless World Initiative New Radio WINNER. CELTIC/CP5-026. 2010. Available online: https://www.yumpu.com/en/document/view/37612823/d53-winner-final-channel-models-celtic-plus (accessed on 13 April 2020).
- METIS EU Project Consortium. Initial Channel Models Based on Measurements. ICT-317669-METIS/D1.2. 2014. Available online: https://metis2020.com/ (accessed on 13 April 2020).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Crash Scenarios | Related Works | |
|---|---|---|---|
| PHY and MAC Layer | Not assumed | [7,8,9,10,11,12,13] | |
| Application Layer | Awareness | [14,15] | |
| Platoon | [16] | ||
| CWS | Not assumed | Our previous works [17,18,19] | |
| Assumed | This work | ||
| Crash Scenario Parameters. | Values |
|---|---|
| NTS | 10–30 frames/s |
| Node distribution model | Uniform, Realistic |
| Relative speed | 120 km/h–240 km/h |
| Wireless Settings | Values |
| Carrier frequency | 5.9 GHz |
| Bandwidth | 10 MHz |
| Frame size | 190 bytes |
| Radio propagation model | WINNER+ (LOS) B1 |
| Shadowing deviation | 3 dB (i.i.d) |
| Noise power | −110 dBm |
| SINR threshold | 5 dB |
| Configuration Settings | Values |
| Reselection counter range | Linear Average |
| Initial RSRP threshold | −110 dBm |
| Resource keep probability | 0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hirai, T.; Murase, T. Performance Evaluations of PC5-based Cellular-V2X Mode 4 for Feasibility Analysis of Driver Assistance Systems with Crash Warning. Sensors 2020, 20, 2950. https://doi.org/10.3390/s20102950
Hirai T, Murase T. Performance Evaluations of PC5-based Cellular-V2X Mode 4 for Feasibility Analysis of Driver Assistance Systems with Crash Warning. Sensors. 2020; 20(10):2950. https://doi.org/10.3390/s20102950
Chicago/Turabian StyleHirai, Takeshi, and Tutomu Murase. 2020. "Performance Evaluations of PC5-based Cellular-V2X Mode 4 for Feasibility Analysis of Driver Assistance Systems with Crash Warning" Sensors 20, no. 10: 2950. https://doi.org/10.3390/s20102950
APA StyleHirai, T., & Murase, T. (2020). Performance Evaluations of PC5-based Cellular-V2X Mode 4 for Feasibility Analysis of Driver Assistance Systems with Crash Warning. Sensors, 20(10), 2950. https://doi.org/10.3390/s20102950