Study on Transient Contact-Impact Characteristics and Driving Capability of Piezoelectric Stack Actuator

Abstract
1. Introduction
2. Contact-Impact and Driving Experiment
2.1. Experiment Setup
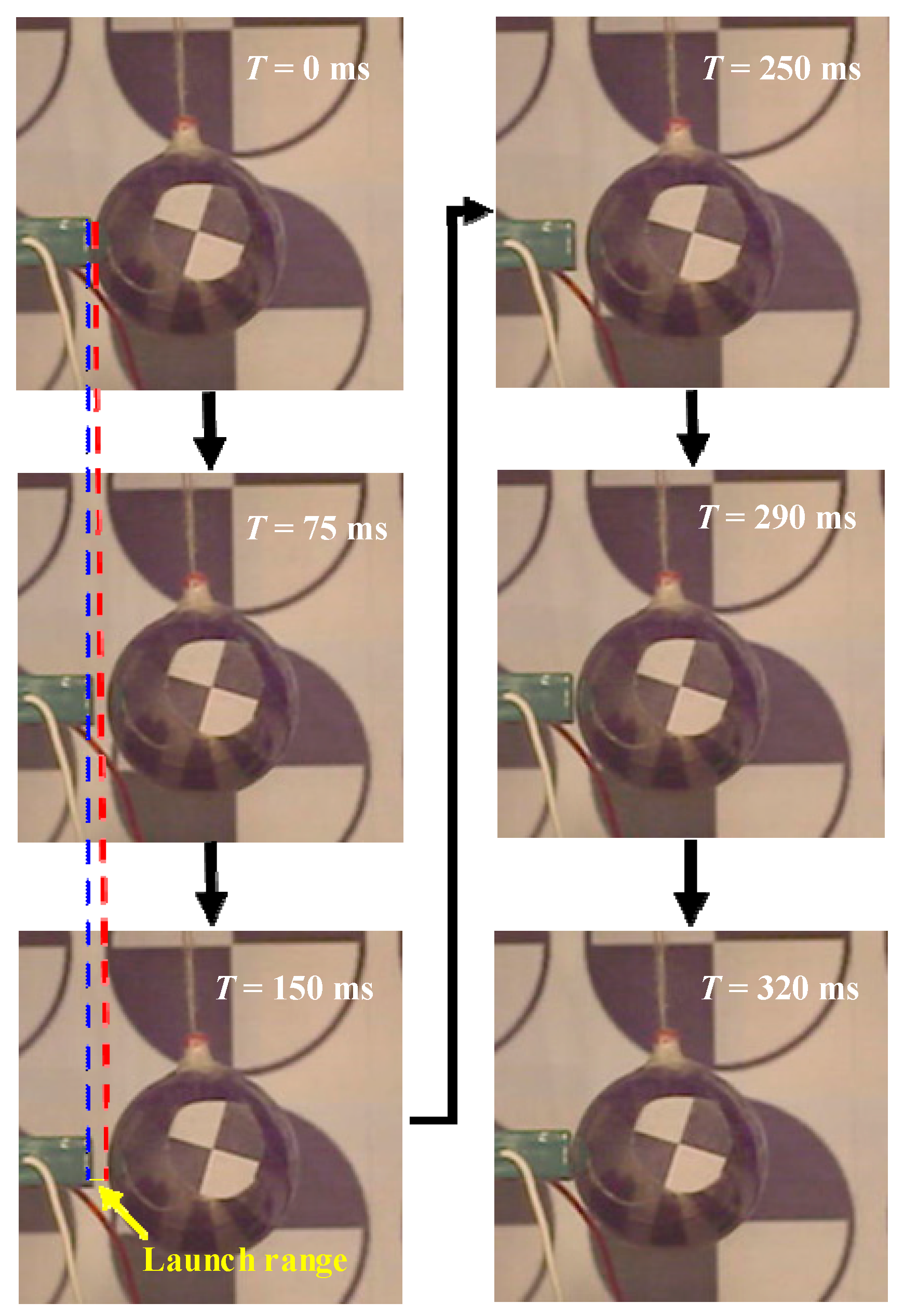
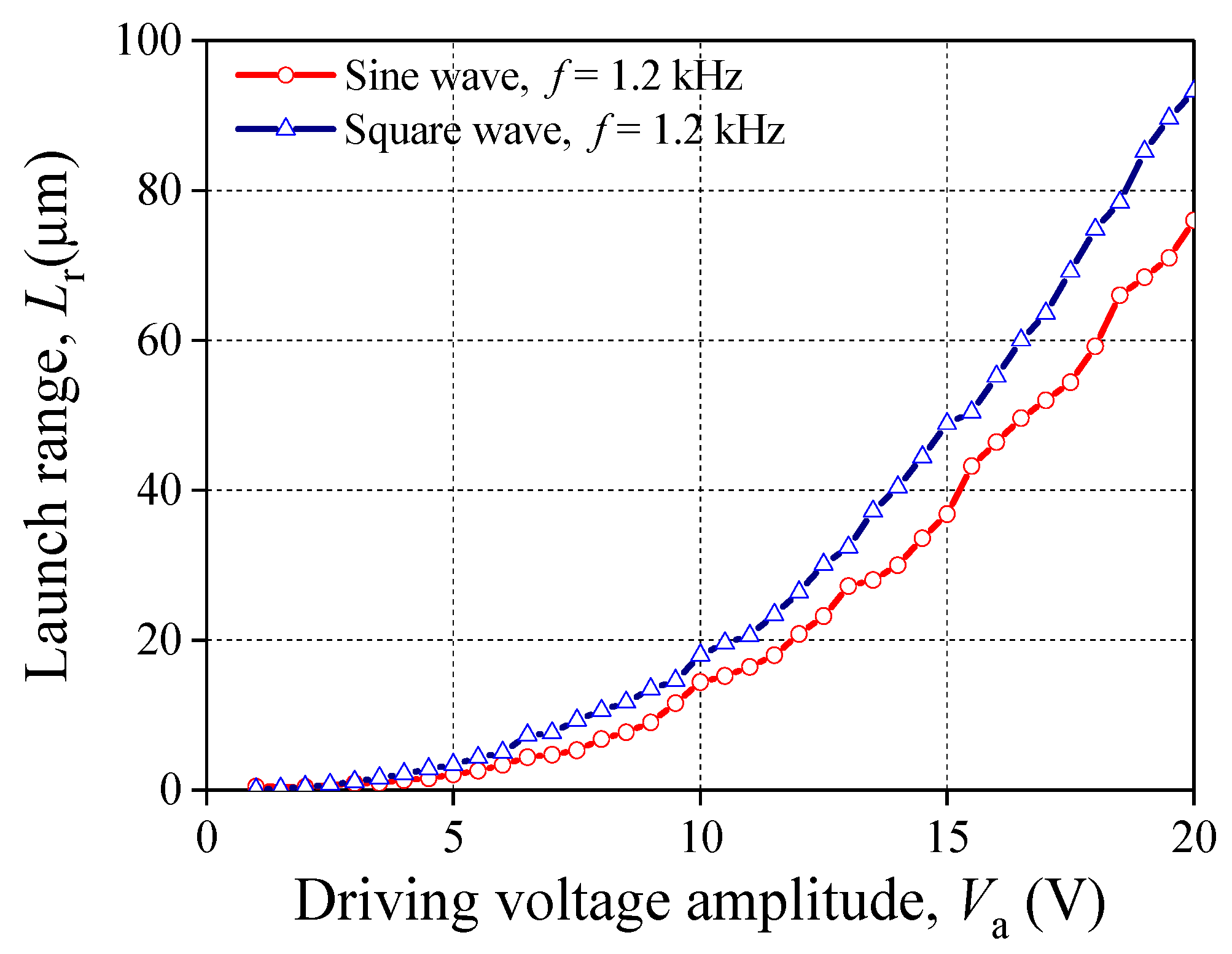
2.2. Analysis of Experimental Results
3. Theoretical Methodology and Contact-Impact Model
3.1. Modeling of PSA
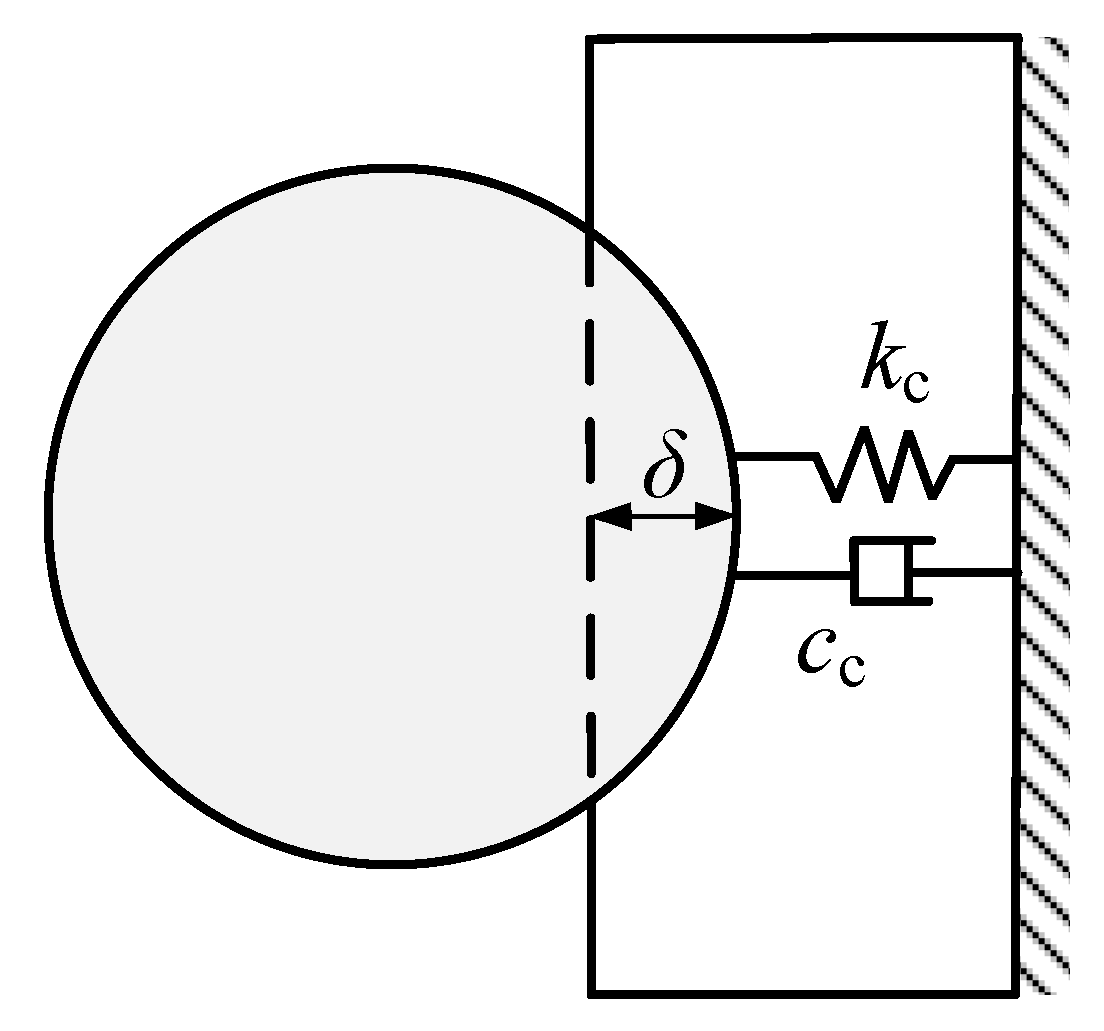
3.2. Dynamic Equation during Contact-Impact Phase
3.3. Dynamic Equation during Post-Impact Phase
3.4. Numerical Solving Strategy
- (1)
- Assign the initial conditions, the terminate conditions, and the total iteration time of the contact-impact phase.
- (2)
- Use the Runge–Kutta numerical integration method to compute the in every step.
- (3)
- Determine whether the steel object contacts the PSA or not.
- (4)
- Obtain the initial displacement and the velocity of the object during the post-impact phase.
4. Numerical Results and Contact Characteristics
4.1. Prediction of Launch Range
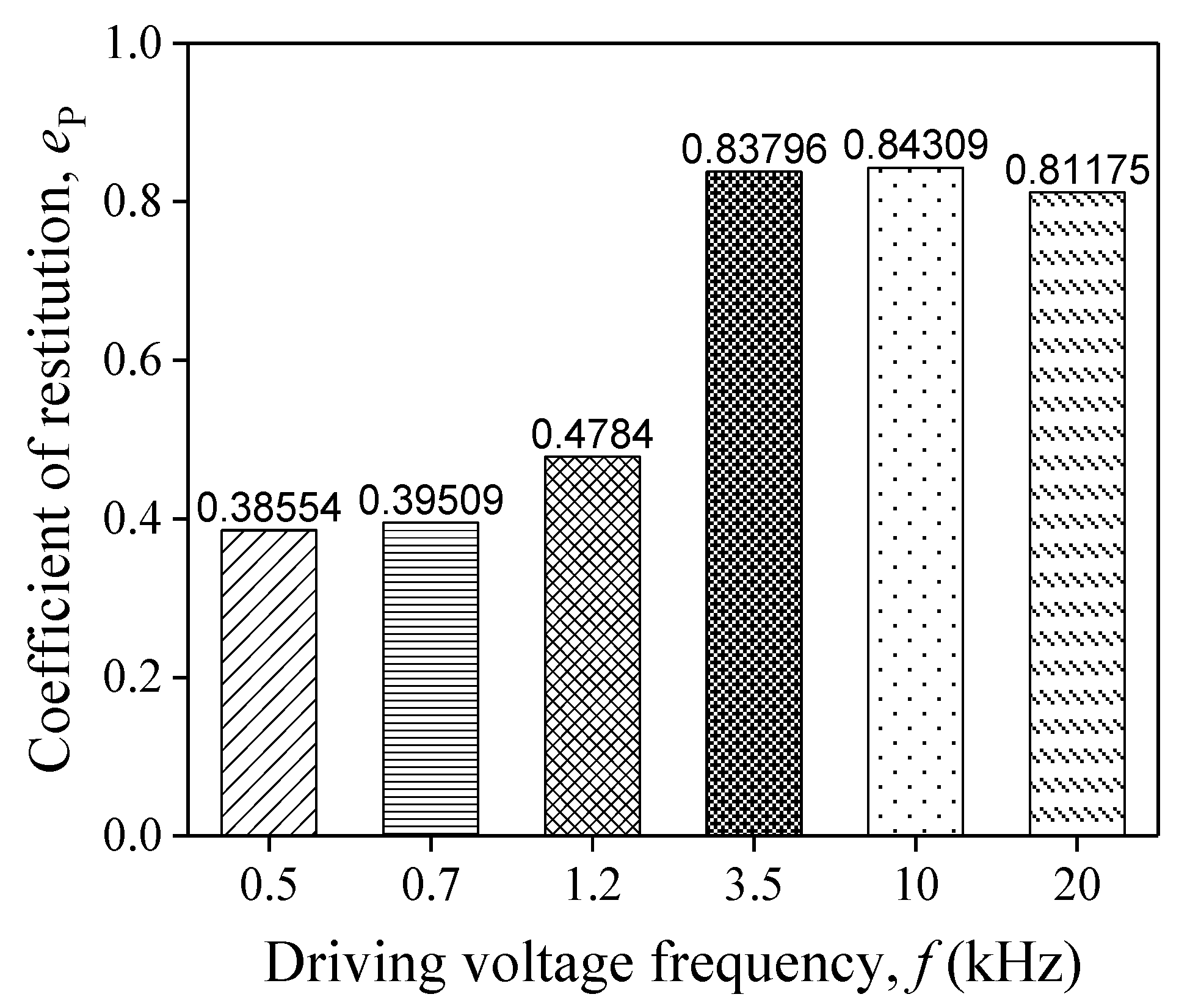
4.2. Contact Mechanics Behavior and Coefficient of Restitution of Impact
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) | |||||||
| Va (V) | Lr (μm) | Va (V) | Lr (μm) | Va (V) | Lr (μm) | Va (V) | Lr (μm) |
| 20.00 | 76.00 | 14.50 | 33.60 | 9.00 | 9.00 | 3.50 | 0.93 |
| 19.50 | 71.00 | 14.00 | 30.00 | 8.50 | 7.70 | 3.00 | 0.90 |
| 19.00 | 68.40 | 13.50 | 28.00 | 8.00 | 6.80 | 2.00 | 0.37 |
| 18.50 | 66.00 | 13.00 | 27.20 | 7.50 | 5.30 | 1.00 | 0.44 |
| 18.00 | 59.20 | 12.50 | 23.20 | 7.00 | 4.70 | ||
| 17.50 | 54.40 | 12.00 | 20.80 | 6.50 | 4.36 | ||
| 17.00 | 52.00 | 11.50 | 18.00 | 6.00 | 3.36 | ||
| 16.50 | 49.60 | 11.00 | 16.40 | 5.50 | 2.56 | ||
| 16.00 | 46.40 | 10.50 | 15.20 | 5.00 | 2.08 | ||
| 15.50 | 43.20 | 10.00 | 14.40 | 4.50 | 1.56 | ||
| 15.00 | 36.80 | 9.50 | 11.60 | 4.00 | 1.32 | ||
| (b) | |||||||
| Va (V) | Lr (μm) | Va (V) | Lr (μm) | Va (V) | Lr (μm) | Va (V) | Lr (μm) |
| 20.00 | 34.40 | 15.50 | 16.80 | 11.00 | 6.05 | 6.50 | 2.18 |
| 19.50 | 33.20 | 15.00 | 15.40 | 10.50 | 4.89 | 6.00 | 1.76 |
| 19.00 | 27.70 | 14.50 | 13.80 | 10.00 | 4.48 | 5.50 | 1.52 |
| 18.50 | 27.60 | 14.00 | 13.60 | 9.50 | 4.34 | 5.00 | 1.21 |
| 18.00 | 24.40 | 13.50 | 12.00 | 9.00 | 3.66 | 4.50 | 1.03 |
| 17.50 | 22.00 | 13.00 | 10.20 | 8.50 | 3.06 | 4.00 | 0.85 |
| 17.00 | 21.20 | 12.50 | 8.50 | 8.00 | 3.31 | 3.50 | 0.57 |
| 16.50 | 19.40 | 12.00 | 7.50 | 7.50 | 3.32 | 3.00 | 0.40 |
| 16.00 | 18.40 | 11.50 | 6.70 | 7.00 | 2.62 | ||
| (a) | |||||||||
| f (Hz) | Lr (μm) | F (Hz) | Lr (μm) | f (Hz) | Lr (μm) | f (Hz) | Lr (μm) | f (Hz) | Lr (μm) |
| 100.00 | 1.64 | 1500.00 | 74.00 | 3000.00 | 45.60 | 8500.00 | 5.86 | 22,000.00 | 1.90 |
| 150.00 | 4.00 | 1600.00 | 73.00 | 3100.00 | 40.50 | 9000.00 | 5.32 | 23,000.00 | 1.45 |
| 200.00 | 7.70 | 1700.00 | 67.00 | 3200.00 | 38.50 | 9500.00 | 5.00 | 24,000.00 | 0.89 |
| 300.00 | 11.30 | 1800.00 | 67.00 | 3300.00 | 36.50 | 10,000.00 | 4.66 | 25,000.00 | 0.67 |
| 400.00 | 26.00 | 1900.00 | 66.00 | 3400.00 | 31.70 | 11,000.00 | 4.74 | ||
| 500.00 | 37.20 | 2000.00 | 64.00 | 3500.00 | 31.20 | 12,000.00 | 4.96 | ||
| 600.00 | 45.20 | 2100.00 | 58.00 | 4000.00 | 23.70 | 13,000.00 | 4.52 | ||
| 700.00 | 50.80 | 2200.00 | 56.00 | 4500.00 | 19.70 | 14,000.00 | 3.84 | ||
| 800.00 | 60.00 | 2300.00 | 58.00 | 5000.00 | 12.70 | 15,000.00 | 3.26 | ||
| 900.00 | 65.00 | 2400.00 | 55.10 | 5500.00 | 11.05 | 16,000.00 | 3.08 | ||
| 1000.00 | 65.00 | 2500.00 | 53.00 | 6000.00 | 10.55 | 17,000.00 | 2.98 | ||
| 1100.00 | 66.00 | 2600.00 | 49.00 | 6500.00 | 9.32 | 18,000.00 | 2.30 | ||
| 1200.00 | 76.00 | 2700.00 | 46.50 | 7000.00 | 8.32 | 19,000.00 | 1.64 | ||
| 1300.00 | 74.80 | 2800.00 | 46.00 | 7500.00 | 6.92 | 20,000.00 | 1.44 | ||
| 1400.00 | 73.00 | 2900.00 | 44.50 | 8000.00 | 6.08 | 21,000.00 | 2.01 | ||
| (b) | |||||||||
| f (Hz) | Lr (μm) | f (Hz) | Lr (μm) | f (Hz) | Lr (μm) | f (Hz) | Lr (μm) | ||
| 100.00 | 0.90 | 1500.00 | 33.20 | 3000.00 | 16.80 | 8500.00 | 2.68 | ||
| 150.00 | 2.04 | 1600.00 | 32.20 | 3100.00 | 16.40 | 9000.00 | 2.28 | ||
| 200.00 | 3.84 | 1700.00 | 31.40 | 3200.00 | 15.60 | 9500.00 | 2.12 | ||
| 300.00 | 7.84 | 1800.00 | 30.20 | 3300.00 | 14.40 | 10,000.00 | 1.90 | ||
| 400.00 | 12.80 | 1900.00 | 28.80 | 3400.00 | 13.80 | 11,000.00 | 1.94 | ||
| 500.00 | 16.40 | 2000.00 | 26.80 | 3500.00 | 14.20 | 12,000.00 | 2.08 | ||
| 600.00 | 22.00 | 2100.00 | 26.80 | 4000.00 | 11.20 | 13,000.00 | 1.72 | ||
| 700.00 | 25.80 | 2200.00 | 25.40 | 4500.00 | 8.44 | 14,000.00 | 1.36 | ||
| 800.00 | 28.80 | 2300.00 | 25.00 | 5000.00 | 5.92 | 15,000.00 | 1.12 | ||
| 900.00 | 30.40 | 2400.00 | 24.20 | 5500.00 | 4.76 | 16,000.00 | 1.10 | ||
| 1000.00 | 32.20 | 2500.00 | 24.40 | 6000.00 | 3.48 | 17,000.00 | 1.12 | ||
| 1100.00 | 33.20 | 2600.00 | 22.60 | 6500.00 | 3.80 | 18,000.00 | 0.90 | ||
| 1200.00 | 34.20 | 2700.00 | 21.40 | 7000.00 | 3.04 | ||||
| 1300.00 | 33.60 | 2800.00 | 19.80 | 7500.00 | 2.64 | ||||
| 1400.00 | 33.60 | 2900.00 | 18.40 | 8000.00 | 2.88 | ||||
| Va (V) | Lr (μm) | Va (V) | Lr (μm) | Va (V) | Lr (μm) | Va (V) | Lr (μm) |
|---|---|---|---|---|---|---|---|
| 20.00 | 93.20 | 15.00 | 48.85 | 10.00 | 18.00 | 5.00 | 3.36 |
| 19.50 | 89.60 | 14.50 | 44.40 | 9.50 | 14.60 | 4.50 | 2.80 |
| 19.00 | 85.20 | 14.00 | 40.40 | 9.00 | 13.50 | 4.00 | 2.16 |
| 18.50 | 78.40 | 13.50 | 37.20 | 8.50 | 11.70 | 3.50 | 1.60 |
| 18.00 | 74.80 | 13.00 | 32.40 | 8.00 | 10.60 | 3.00 | 1.12 |
| 17.50 | 69.20 | 12.50 | 30.10 | 7.50 | 9.30 | 2.50 | 0.74 |
| 17.00 | 63.60 | 12.00 | 26.40 | 7.00 | 7.60 | 2.00 | 0.40 |
| 16.50 | 60.00 | 11.50 | 23.40 | 6.50 | 7.30 | 1.50 | 0.20 |
| 16.00 | 55.20 | 11.00 | 20.60 | 6.00 | 5.00 | 1.00 | 0.09 |
| 15.50 | 50.40 | 10.50 | 19.60 | 5.50 | 4.32 |
| f (Hz) | Lr (μm) | f (Hz) | Lr (μm) | f (Hz) | Lr (μm) | f (Hz) | Lr (μm) |
|---|---|---|---|---|---|---|---|
| 1.00 | 88.00 | 1800.00 | 94.00 | 5800.00 | 29.40 | 18,000.00 | 4.08 |
| 10.00 | 88.00 | 2000.00 | 92.80 | 6000.00 | 26.00 | 19,000.00 | 3.45 |
| 20.00 | 86.80 | 2500.00 | 93.60 | 6200.00 | 24.80 | 20,000.00 | 2.76 |
| 50.00 | 93.00 | 3000.00 | 87.60 | 6400.00 | 22.20 | 21,000.00 | 2.56 |
| 100.00 | 93.60 | 3500.00 | 75.80 | 6600.00 | 21.20 | 22,000.00 | 2.52 |
| 150.00 | 93.60 | 3800.00 | 66.80 | 6800.00 | 19.80 | 23,000.00 | 1.90 |
| 200.00 | 94.40 | 4000.00 | 63.20 | 7000.00 | 18.20 | 24,000.00 | 1.16 |
| 300.00 | 95.20 | 4200.00 | 57.20 | 7500.00 | 15.60 | 25,000.00 | 0.85 |
| 400.00 | 94.00 | 4400.00 | 54.00 | 8000.00 | 13.60 | 30,000.00 | 0.47 |
| 500.00 | 94.00 | 4600.00 | 50.20 | 8500.00 | 12.50 | 40,000.00 | 0.09 |
| 600.00 | 94.80 | 4800.00 | 45.60 | 9000.00 | 11.30 | 50,000.00 | 0.00 |
| 1000.00 | 92.80 | 5000.00 | 40.20 | 10,000.00 | 9.50 | ||
| 1200.00 | 93.20 | 5200.00 | 37.20 | 12,000.00 | 8.00 | ||
| 1400.00 | 91.30 | 5400.00 | 34.00 | 15,000.00 | 6.24 | ||
| 1600.00 | 94.00 | 5600.00 | 30.60 | 17,000.00 | 4.48 |
References
- Uchino, K. Introduction to piezoelectric actuators: Research misconceptions and rectifications. Jpn. J. Appl. Phys. 2019, 58, SG0803. [Google Scholar] [CrossRef]
- Bazghaleh, M.; Grainger, S.; Mohammadzaheri, M. A review of charge methods for driving piezoelectric actuators. J. Intell. Mater. Syst. Struct. 2018, 29, 2096–2104. [Google Scholar] [CrossRef]
- Gan, J.Q.; Zhang, X.M. A review of nonlinear hysteresis modeling and control of piezoelectric actuators. AIP Adv. 2019, 9, 040702. [Google Scholar] [CrossRef]
- Liu, C.; Guo, Y.L. Modeling and Positioning of a PZT Precision Drive System. Sensors 2017, 17, 2577. [Google Scholar] [CrossRef] [PubMed]
- Meng, X.D.; Lin, X.H. Analysis of a Cascaded Piezoelectric Ultrasonic Transducer with Three Sets of Piezoelectric Ceramic Stacks. Sensors 2019, 19, 580. [Google Scholar] [CrossRef] [PubMed]
- Lu, S.Z.; Zhang, J.X.; Liu, Y.; Zheng, H.; Ren, C.L.; Liu, W. Droplet formation study of a liquid micro-dispenser driven by a piezoelectric actuator. Smart Mater. Struct. 2019, 28, 055003. [Google Scholar] [CrossRef]
- Su, Q.; Quan, Q.Q.; Deng, J.; Yu, H.P. A Quadruped Micro-Robot Based on Piezoelectric Driving. Sensors 2018, 18, 810. [Google Scholar] [CrossRef] [PubMed]
- Han, L.L.; Zhao, H.N.; Xia, H.J.; Pan, C.L.; Jiang, Y.Z.; Li, W.S.; Yu, L.D. A Compact Impact Rotary Motor Based on a Piezoelectric Tube Actuator with Helical Interdigitated Electrodes. Sensors 2018, 18, 2195. [Google Scholar] [CrossRef] [PubMed]
- Filippatos, A.; Wollmann, T.; Nguyen, M.; Kostka, P.; Dannemann, M.; Langkamp, A.; Salles, L.; Gude, M. Design and Testing of a Co-Rotating Vibration Excitation System. Sensors 2019, 19, 92. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.T.; Higuchi, T.; Fung, R.F. A novel precision positioning table utilizing impact force of spring-mounted piezoelectric actuator—Part I: Experimental design and results. Precis. Eng. 2003, 27, 14–21. [Google Scholar] [CrossRef]
- Pozzi, M.; King, T. Piezoelectric modelling for an impact actuator. Mechatron 2003, 13, 553–570. [Google Scholar] [CrossRef]
- Carrera, E.; Valvano, S.; Kulikov, G.M. Electro-mechanical analysis of composite and sandwich multilayered structures by shell elements with node-dependent kinematics. Int. J. Smart Nano Mater. 2018, 9, 1–33. [Google Scholar] [CrossRef]
- Carrera, E.; Valvano, S.; Kulikov, G.M. Multilayered plate elements with node-dependent kinematics for electro-mechanical problems. Int. J. Smart Nano Mater. 2018, 9, 279–317. [Google Scholar] [CrossRef]
- Adriaens, H.J.M.T.A.; Koning, W.L.D.; Banning, R. Modeling piezoelectric actuators. IEEE/ASME Trans. Mechatron 2002, 5, 331–341. [Google Scholar] [CrossRef]
- Jia, L.J.; Li, M.; Chen, W.M. The model analysis of strain transfer in the application of piezoelectric actuators. Eng. Mech. 2010, 27, 205. [Google Scholar]
- Liu, Y.T.; Higuchi, T.; Fung, R.F.; Huang, T.K. Dynamic responses of a precision positioning table impacted by a soft-mounted piezoelectric actuator. Precis. Eng. 2004, 28, 252–260. [Google Scholar] [CrossRef]
- Huang, S.; Tan, K.K.; Lee, T.H. Adaptive Sliding-Mode Control of Piezoelectric Actuators. IEEE Trans. Ind. Electron. 2009, 56, 3514–3522. [Google Scholar] [CrossRef]
- Shen, Y.N.; Yin, X.C. Dynamic substructure model for multiple impacts of micro/nano piezoelectric precision drive system. Sci. China Ser. E Technol. Sci. 2008, 50, 472–477. [Google Scholar] [CrossRef]
- Ha, J.L.; Fung, R.F.; Yang, C.S. Hysteresis identification and dynamic responses of the impact drive mechanism. J. Sound Vib. 2005, 283, 943–956. [Google Scholar] [CrossRef]















| PSA | LDV | High-Speed Camera | |||
|---|---|---|---|---|---|
| M | NEC\TOKIN AE0505D16DF | M | OFV-5000 | M | MEMRECAM GX-3 |
| SC | 1.5 μF | WD | 0.5~100 m | ST | CCD |
| RF | 69 kHz | vmax | 10 (m/s) | R | 45 |
| Stiffness | 48.9 (N/μm) | FR | DC~24 MHz | ||
| VR | Over 0.01 (μm/s) | ||||
| DR | Over 0.05 pm | ||||
| Group | Waveform | Amplitude (V) | Frequency (kHz) | Launch Range (μm) |
|---|---|---|---|---|
| 1 | Sine wave | 20 | 0.1–25 | 0.67–76.00 |
| 2 | Sine wave | 15 | 0.1–18 | 0.90–34.2 |
| 3 | Sine wave | 1–20 | 1.2 | 0.37–76.00 |
| 4 | Sine wave | 3–20 | 3.0 | 0.4–34.4 |
| 5 | Square wave | 1–20 | 1.2 | 0.09–93.2 |
| 6 | Square wave | 20 | 0.001–50 | 0–94.8 |
| M | m | q | l | ks | kc | cs | cc |
|---|---|---|---|---|---|---|---|
| 0.027 | 0.005 | 1.2 × 10−7 | 0.09 | 4.89 × 107 | 1.425 × 105 | 13,991 | 68 |
| Va (V) | f = 1.2 kHz | f = 3.0 kHz | ||
|---|---|---|---|---|
| Theoretical Lr (μm) | Experimental Lr (μm) | Theoretical Lr (μm) | Experimental Lr (μm) | |
| 16 | 60.60 | 46.40 | 28.97 | 18.40 |
| 17 | 64.40 | 52.00 | 30.70 | 21.20 |
| 18 | 68.18 | 59.20 | 32.60 | 24.40 |
| 19 | 72.96 | 68.40 | 34.41 | 27.70 |
| 20 | 75.75 | 76.00 | 36.22 | 34.40 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Shen, Y.; Xing, Q. Study on Transient Contact-Impact Characteristics and Driving Capability of Piezoelectric Stack Actuator. Sensors 2020, 20, 233. https://doi.org/10.3390/s20010233
Li Y, Shen Y, Xing Q. Study on Transient Contact-Impact Characteristics and Driving Capability of Piezoelectric Stack Actuator. Sensors. 2020; 20(1):233. https://doi.org/10.3390/s20010233
Chicago/Turabian StyleLi, Yanze, Yunian Shen, and Qiaoping Xing. 2020. "Study on Transient Contact-Impact Characteristics and Driving Capability of Piezoelectric Stack Actuator" Sensors 20, no. 1: 233. https://doi.org/10.3390/s20010233
APA StyleLi, Y., Shen, Y., & Xing, Q. (2020). Study on Transient Contact-Impact Characteristics and Driving Capability of Piezoelectric Stack Actuator. Sensors, 20(1), 233. https://doi.org/10.3390/s20010233