Allumo: Preprocessing and Calibration Software for Wearable Accelerometers Used in Posture Tracking

 ,
,  ,
, 
Abstract
1. Introduction
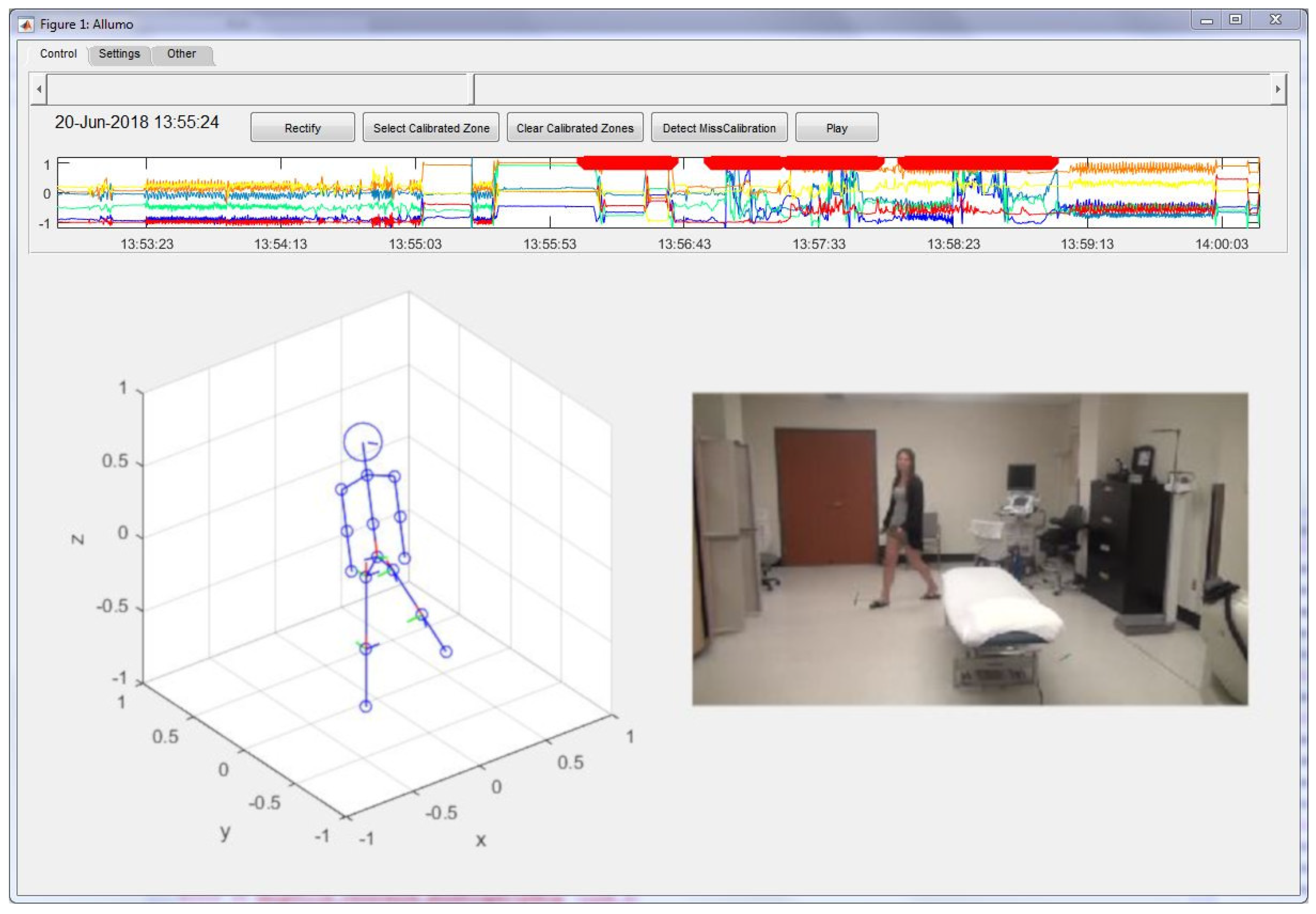
2. Software Overview
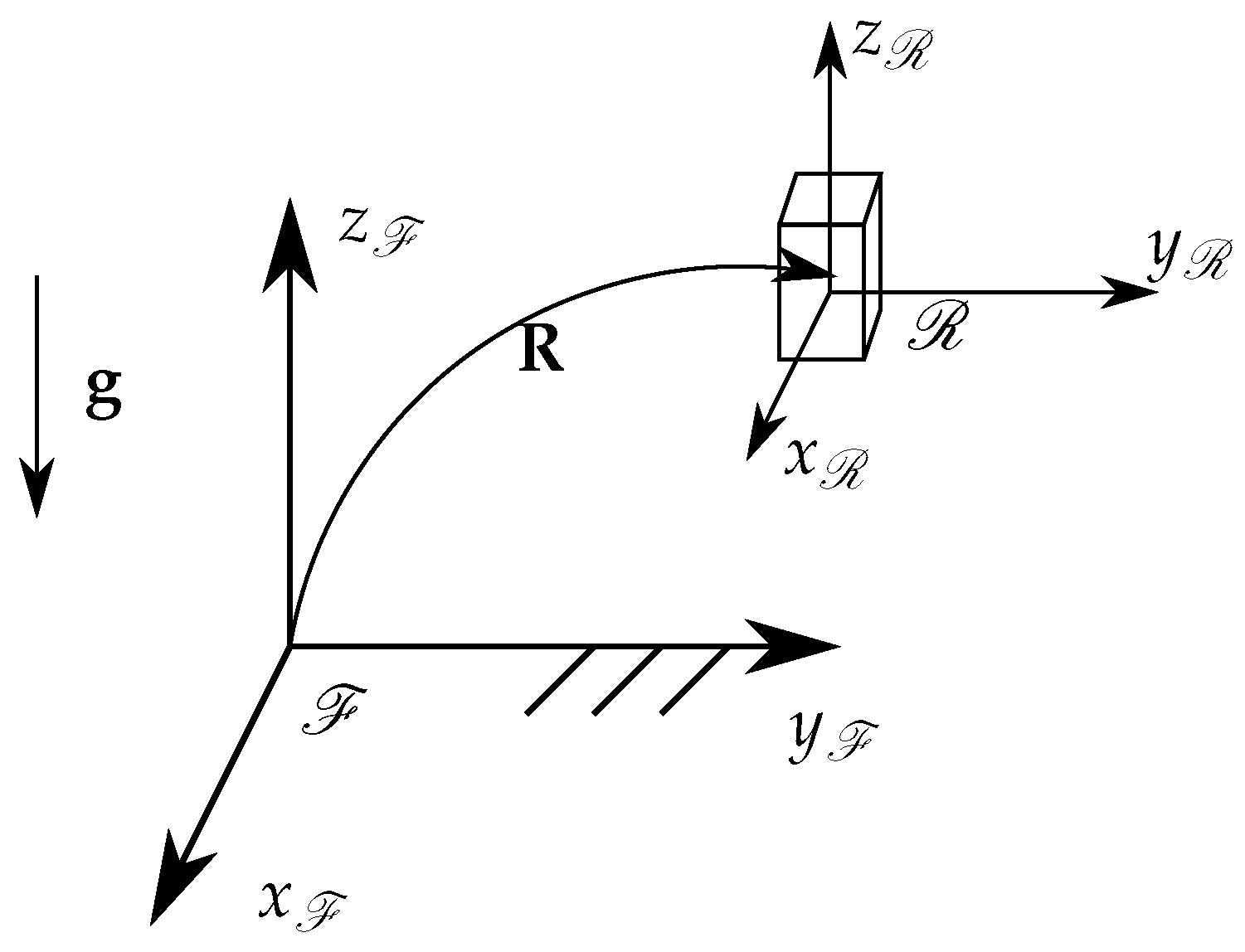
3. Automatic Calibration Algorithm
4. Automatic Erroneous-Orientation Detection
5. Activity Detection
6. Case Studies
6.1. Demonstration in the Laboratory
6.2. Demonstration in the Field
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tan, H.; Wilson, A.M.; Lowe, J. Measurement of stride parameters using a wearable GPS and inertial measurement unit. J. Biomech. 2008, 41, 1398–1406. [Google Scholar] [CrossRef] [PubMed]
- Benocci, M.; Rocchi, L.; Farella, E.; Chiari, L.; Benini, L. A wireless system for gait and posture analysis based on pressure insoles and Inertial Measurement Units. In Proceedings of the 2009 3rd International Conference on Pervasive Computing Technologies for Healthcare, London, UK, 1–3 April 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Brodie, M.; Walmsley, A.; Page, W. Fusion motion capture: A prototype system using inertial measurement units and GPS for the biomechanical analysis of ski racing. Sports Technol. 2008, 1, 17–28. [Google Scholar] [CrossRef]
- Bebek, O.; Suster, M.A.; Rajgopal, S.; Fu, M.J.; Huang, X.; Cavusoglu, M.C.; Young, D.J.; Mehregany, M.; van den Bogert, A.J.; Mastrangelo, C.H. Personal Navigation via High-Resolution Gait-Corrected Inertial Measurement Units. IEEE Trans. Instrum. Meas. 2010, 59, 3018–3027. [Google Scholar] [CrossRef]
- Bonnet, V.; Mazzà, C.; Fraisse, P.; Cappozzo, A. Real-time Estimate of Body Kinematics During a Planar Squat Task Using a Single Inertial Measurement Unit. IEEE Trans. Biomed. Eng. 2013, 60, 1920–1926. [Google Scholar] [CrossRef] [PubMed]
- Poitras, I.; Bielmann, M.; Campeau-Lecours, A.; Mercier, C.; Bouyer, L.J.; Roy, J.S. Validity of Wearable Sensors at the Shoulder Joint: Combining Wireless Electromyography Sensors and Inertial Measurement Units to Perform Physical Workplace Assessments. Sensors 2019, 19, 1885. [Google Scholar] [CrossRef] [PubMed]
- Peruzzi, A.; Croce, U.D.; Cereatti, A. Estimation of stride length in level walking using an inertial measurement unit attached to the foot: A validation of the zero velocity assumption during stance. J. Biomech. 2011, 44, 1991–1994. [Google Scholar] [CrossRef] [PubMed]
- Bergamini, E.; Picerno, P.; Pillet, H.; Natta, F.; Thoreux, P.; Camomilla, V. Estimation of temporal parameters during sprint running using a trunk-mounted inertial measurement unit. J. Biomech. 2012, 45, 1123–1126. [Google Scholar] [CrossRef] [PubMed]
- Bergamini, E.; Guillon, P.; Camomilla, V.; Pillet, H.; Skalli, W.; Cappozzo, A. Trunk Inclination Estimate During the Sprint Start Using an Inertial Measurement Unit: A Validation Study. J. Appl. Biomech. 2013, 29, 622–627. [Google Scholar] [CrossRef] [PubMed]
- Dadashi, F.; Millet, G.; Aminian, K. Inertial measurement unit and biomechanical analysis of swimming: An update. Swiss Soc. Sports Med. 2013, 61, 21–26. [Google Scholar]
- Roetenberg, D.; Luinge, H.; Slycke, P. Xsens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors; Xsens Technologies: Enschede, The Netherlands, 2009; pp. 1–7. [Google Scholar]
- Brodie, M.; Walmsley, A.; Page, W. The static accuracy and calibration of inertial measurement units for 3D orientation. Comput. Methods Biomech. Biomed. Eng. 2008, 11, 641–648. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.T.; Novak, A.C.; Brouwer, B.; Li, Q. Concurrent validation of Xsens MVN measurement of lower limb joint angular kinematics. Physiol. Meas. 2013, 34, N63–N69. [Google Scholar] [CrossRef] [PubMed]
- Schal, M.C., Jr.; Fethke, N.B.; Chen, H.; Oyama, S.; Douphrate, D.I. Accuracy and repeatability of an inertial measurement unit system for field-based occupational studies. Ergonomics 2016, 59, 591–602. [Google Scholar] [CrossRef] [PubMed]
- Poitras, I.; Dupuis, F.; Bielmann, M.; Campeau-Lecours, A.; Mercier, C.; Bouyer, L.J.; Roy, J.S. Validity and Reliability of Wearable Sensors for Joint Angle Estimation: A Systematic Review. Sensors 2019, 19, 1555. [Google Scholar] [CrossRef] [PubMed]
- Luinge, H.; Veltink, P.; Baten, C. Ambulatory measurement of arm orientation. J. Biomech. 2007, 40, 78–85. [Google Scholar] [CrossRef] [PubMed]
- Chardonnens, J.; Favre, J.; Aminian, K. An effortless procedure to align the local frame of an inertial measurement unit to the local frame of another motion capture system. J. Biomech. 2012, 45, 2297–2300. [Google Scholar] [CrossRef] [PubMed]
- Favre, J.; Aissaoui, R.; Jolles, B.; de Guise, J.; Aminian, K. Functional calibration procedure for 3D knee joint angle description using inertial sensors. J. Biomech. 2009, 42, 2330–2335. [Google Scholar] [CrossRef] [PubMed]
- Lötters, J.; Schipper, J.; Veltink, P.; Olthuis, W.; Bergveld, P. Procedure for in-use calibration of triaxial accelerometers in medical applications. Sens. Actuators A Phys. 1998, 68, 221–228. [Google Scholar] [CrossRef]
- Nez, A.; Fradet, L.; Laguillaumie, P.; Monnet, T.; Lacouture, P. Comparison of calibration methods for accelerometers used in human motion analysis. Med. Eng. Phys. 2016, 38, 1289–1299. [Google Scholar] [CrossRef] [PubMed]
- Cheung, Y.; Hsueh, P.Y.; Ensari, I.; Willey, J.; Diaz, K. Quantile Coarsening Analysis of High-Volume Wearable Activity Data in a Longitudinal Observational Study. Sensors 2018, 18, 3056. [Google Scholar] [CrossRef] [PubMed]
- Yurtman, A.; Barshan, B.; Fidan, B. Activity Recognition Invariant to Wearable Sensor Unit Orientation Using Differential Rotational Transformations Represented by Quaternions. Sensors 2018, 18, 2725. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
| Walking | Running | Trunk Angle | Logbook Entry | |
|---|---|---|---|---|
| segment 1 | 7.40% | 0.19% | Jumping jacks as a warm-up following by work at the computer | |
| segment 2 | 7.20% | 0.00% | Lying down for 50 min | |
| segment 3 | 4.42% | 0.00% | Work at the computer (mostly siting) | |
| segment 4 | 12.78% | 35.84% | 30 min jogging followed by work at the laboratory | |
| segment 5 | 6.89% | 0.00% | 50 min nap (lying down) | |
| segment 6 | 17.08% | 0.83% | Helicopter outing and walk ashore | |
| segment 7 | 9.87% | 0.02% | Diner and relaxation on board |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fortin-Côté, A.; Roy, J.-S.; Bouyer, L.; Jackson, P.; Campeau-Lecours, A. Allumo: Preprocessing and Calibration Software for Wearable Accelerometers Used in Posture Tracking. Sensors 2020, 20, 229. https://doi.org/10.3390/s20010229
Fortin-Côté A, Roy J-S, Bouyer L, Jackson P, Campeau-Lecours A. Allumo: Preprocessing and Calibration Software for Wearable Accelerometers Used in Posture Tracking. Sensors. 2020; 20(1):229. https://doi.org/10.3390/s20010229
Chicago/Turabian StyleFortin-Côté, Alexis, Jean-Sébastien Roy, Laurent Bouyer, Philip Jackson, and Alexandre Campeau-Lecours. 2020. "Allumo: Preprocessing and Calibration Software for Wearable Accelerometers Used in Posture Tracking" Sensors 20, no. 1: 229. https://doi.org/10.3390/s20010229
APA StyleFortin-Côté, A., Roy, J.-S., Bouyer, L., Jackson, P., & Campeau-Lecours, A. (2020). Allumo: Preprocessing and Calibration Software for Wearable Accelerometers Used in Posture Tracking. Sensors, 20(1), 229. https://doi.org/10.3390/s20010229