LC-DFSA: Low Complexity Dynamic Frame Slotted Aloha Anti-Collision Algorithm for RFID System



Abstract
1. Introduction
- This paper proposes a low complexity anti-collision algorithm named LC-DFSA, which can be conveniently applied to engineering implementations.
- Meanwhile, the computational and signaling complexity of LC-DFSA is low for a passive RFID system, and the compatibility for the standard framework is good as well.
2. Motivation
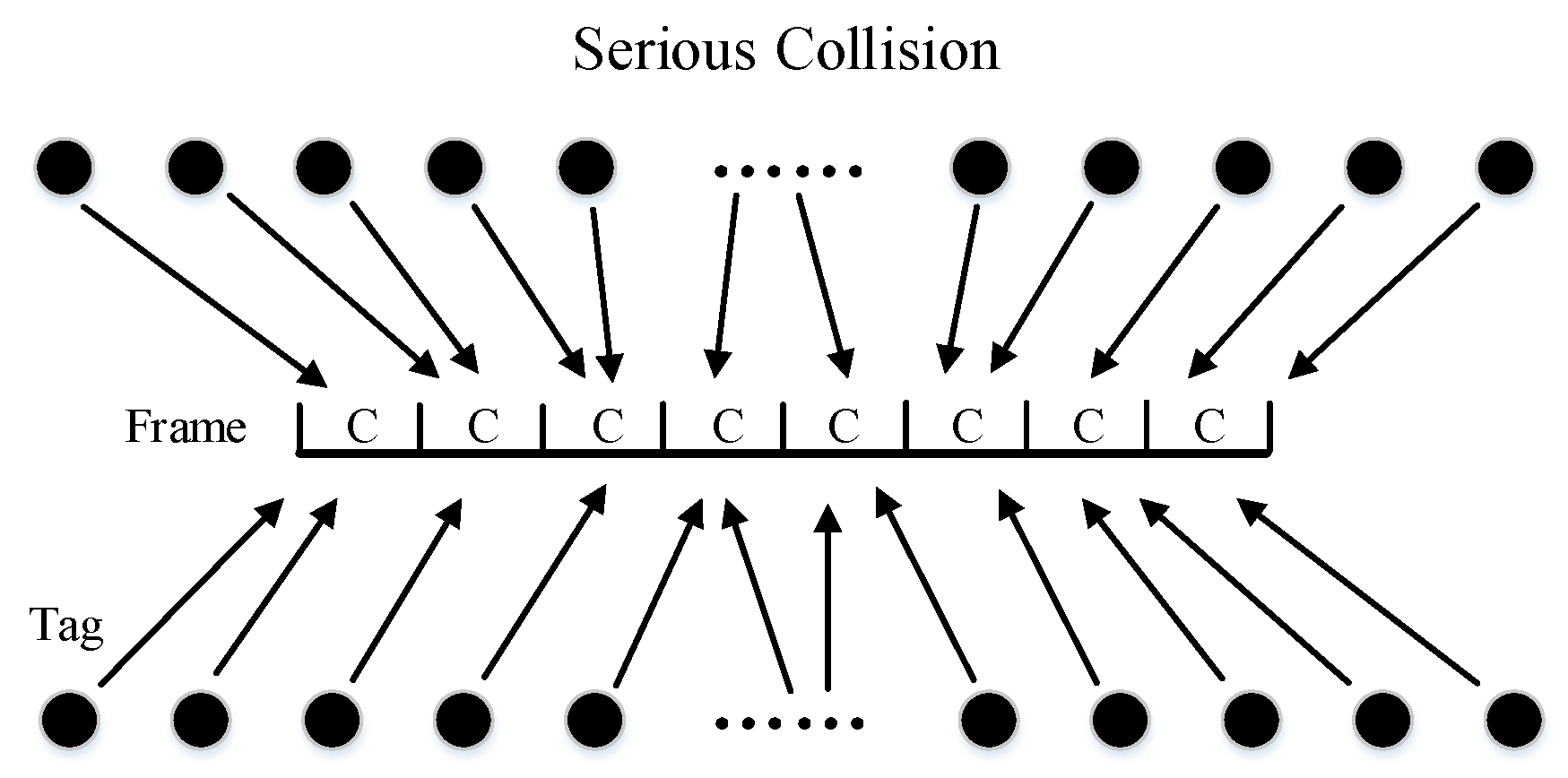
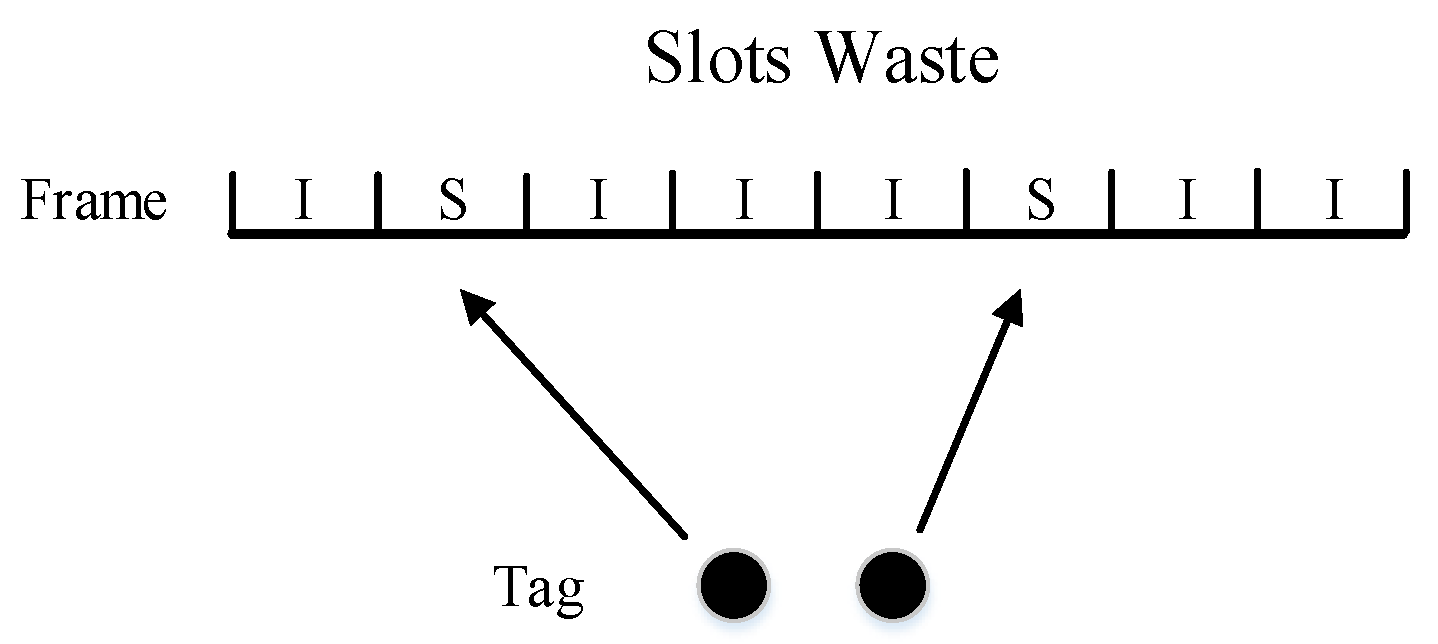
2.1. Brief Introduction to Aloha Based Anti-Collision Algorithm
2.2. Motivation
3. Proposed LC-DFSA Algorithm
3.1. Key Idea
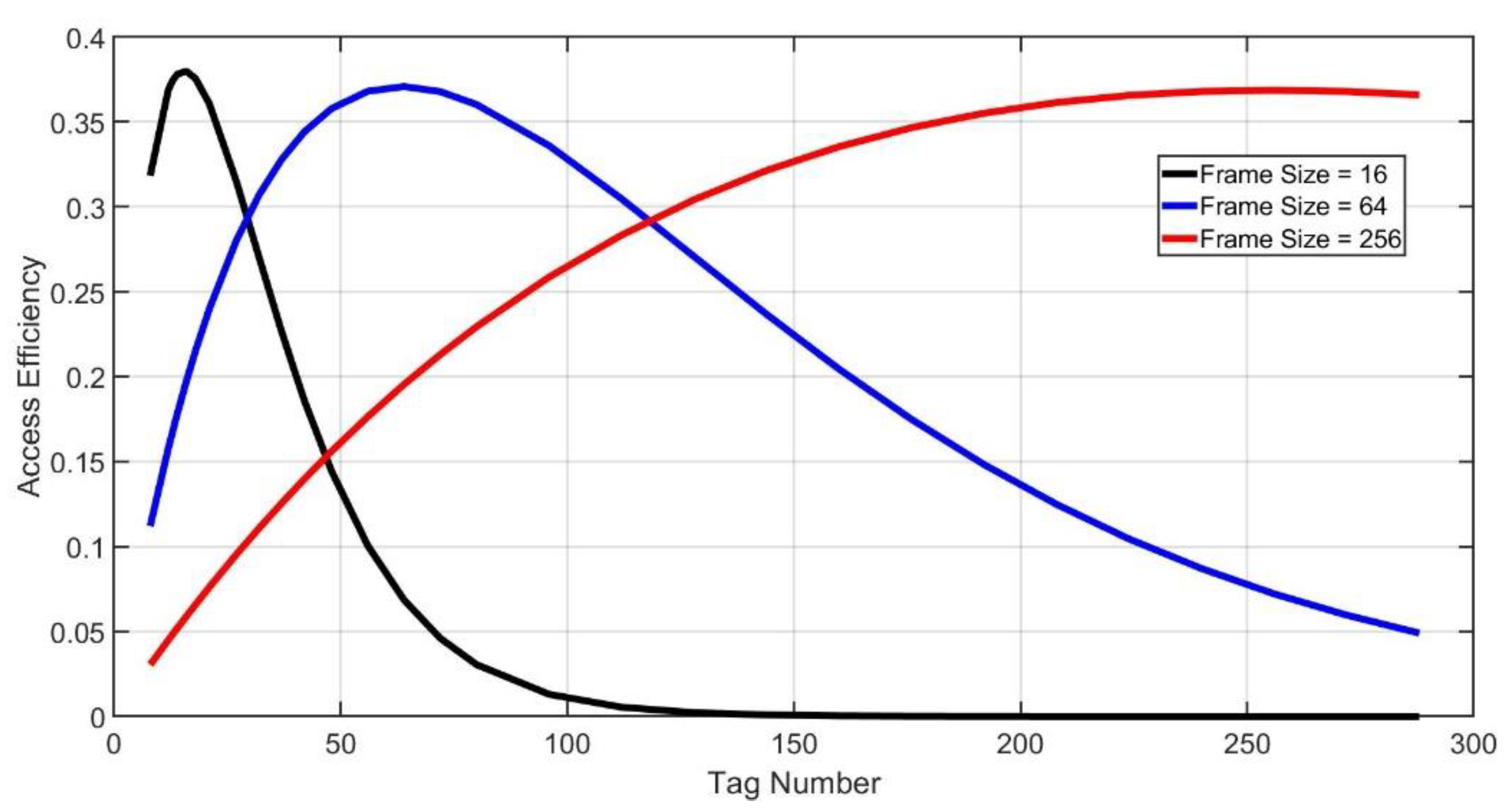
3.2. Optimal Frame Size
3.3. Tag Number—Optimal Frame Size Table
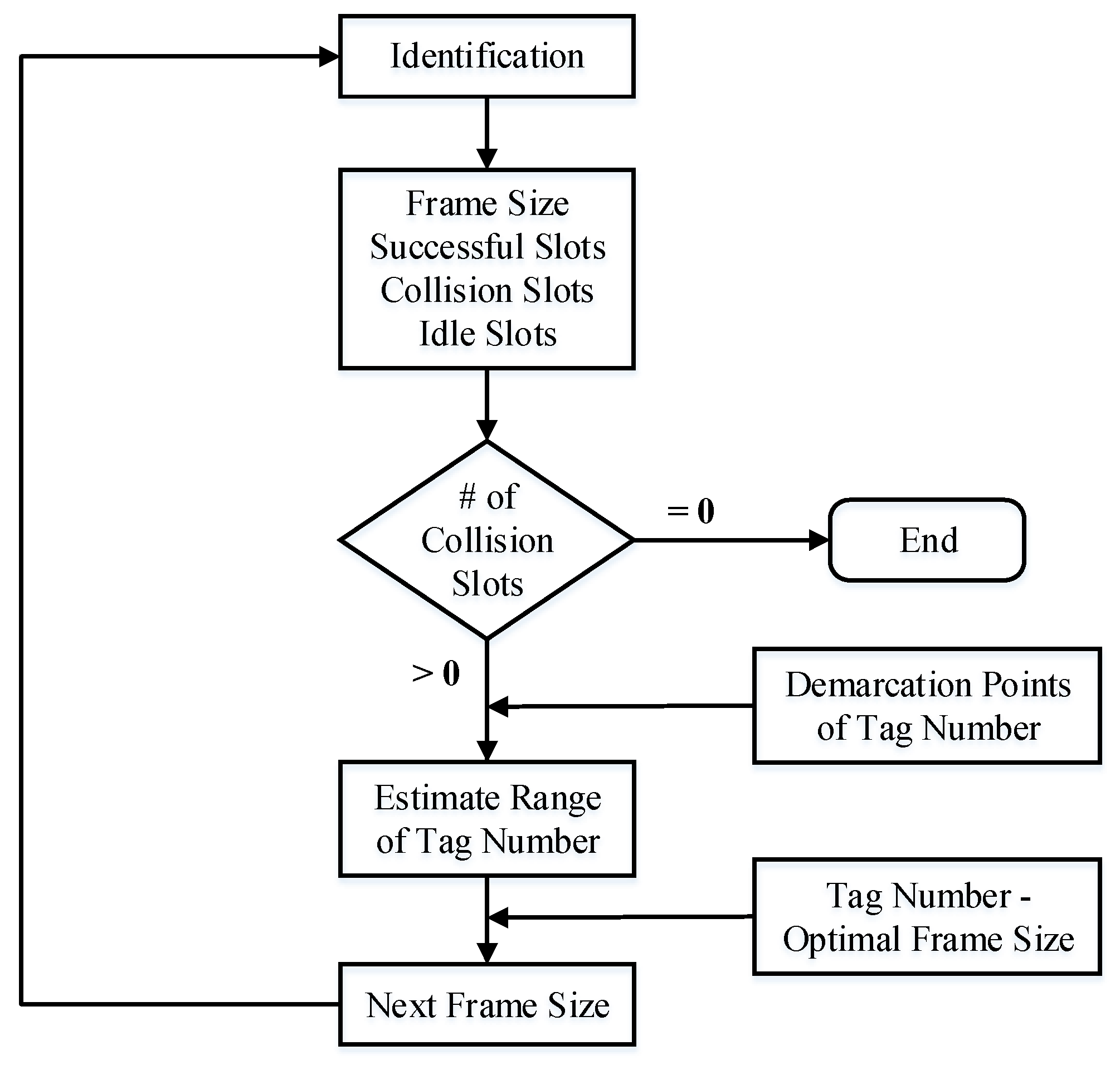
3.4. LC-DFSA Algorithm
| Algorithm 1 LC-DFSA |
| 1: After a frame, get , and . 2: If 3: If 4: If 5: will be calculated by . 6: Else 7: will be calculated by . 8: Else 9: Calculate and . 10: Compare and . And get . 11: will be calculated by directly. 12: Start a new frame with slots. 13: Else 14: Tag inventory completes. |
3.5. Complexity Analysis
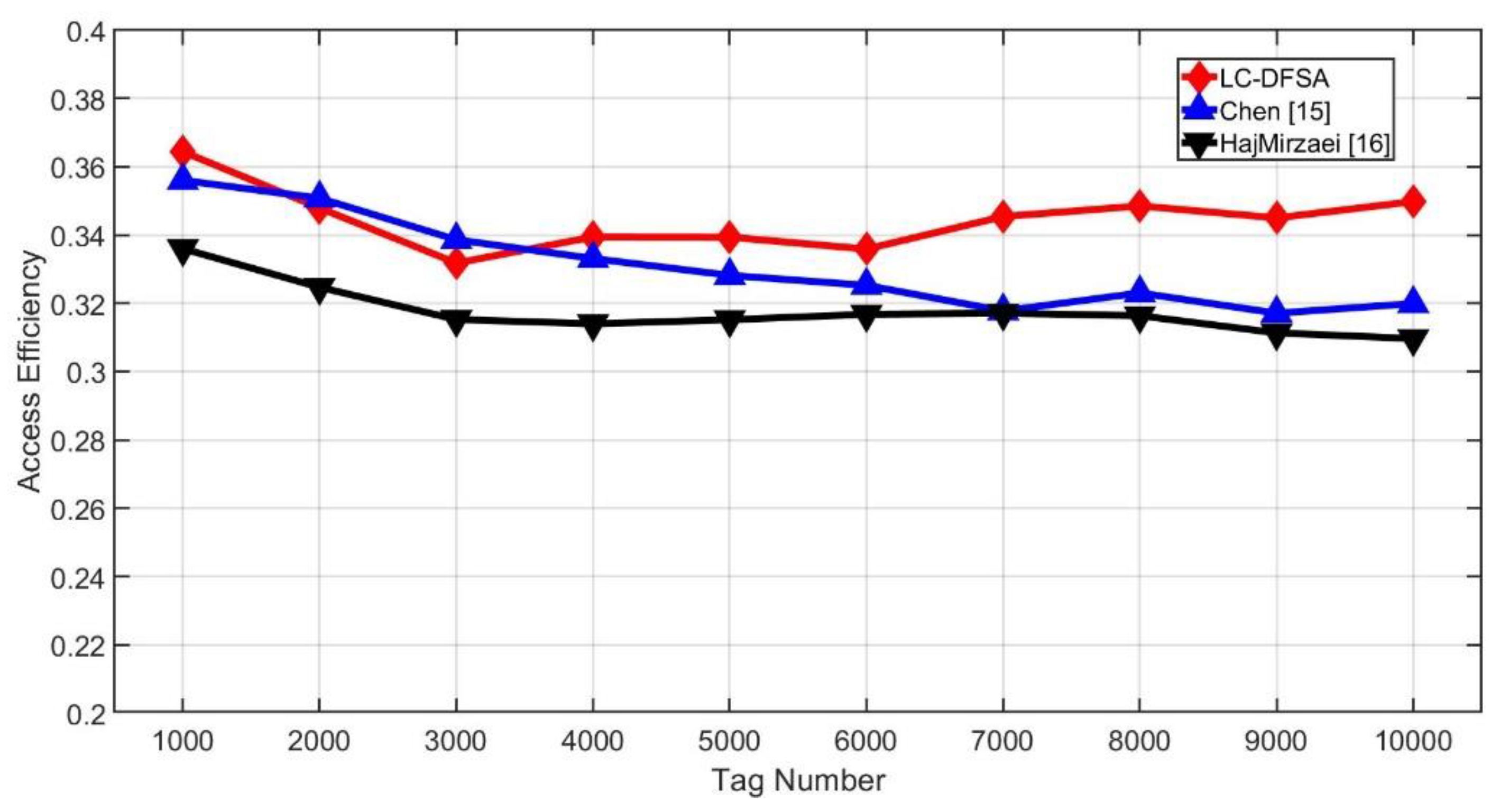
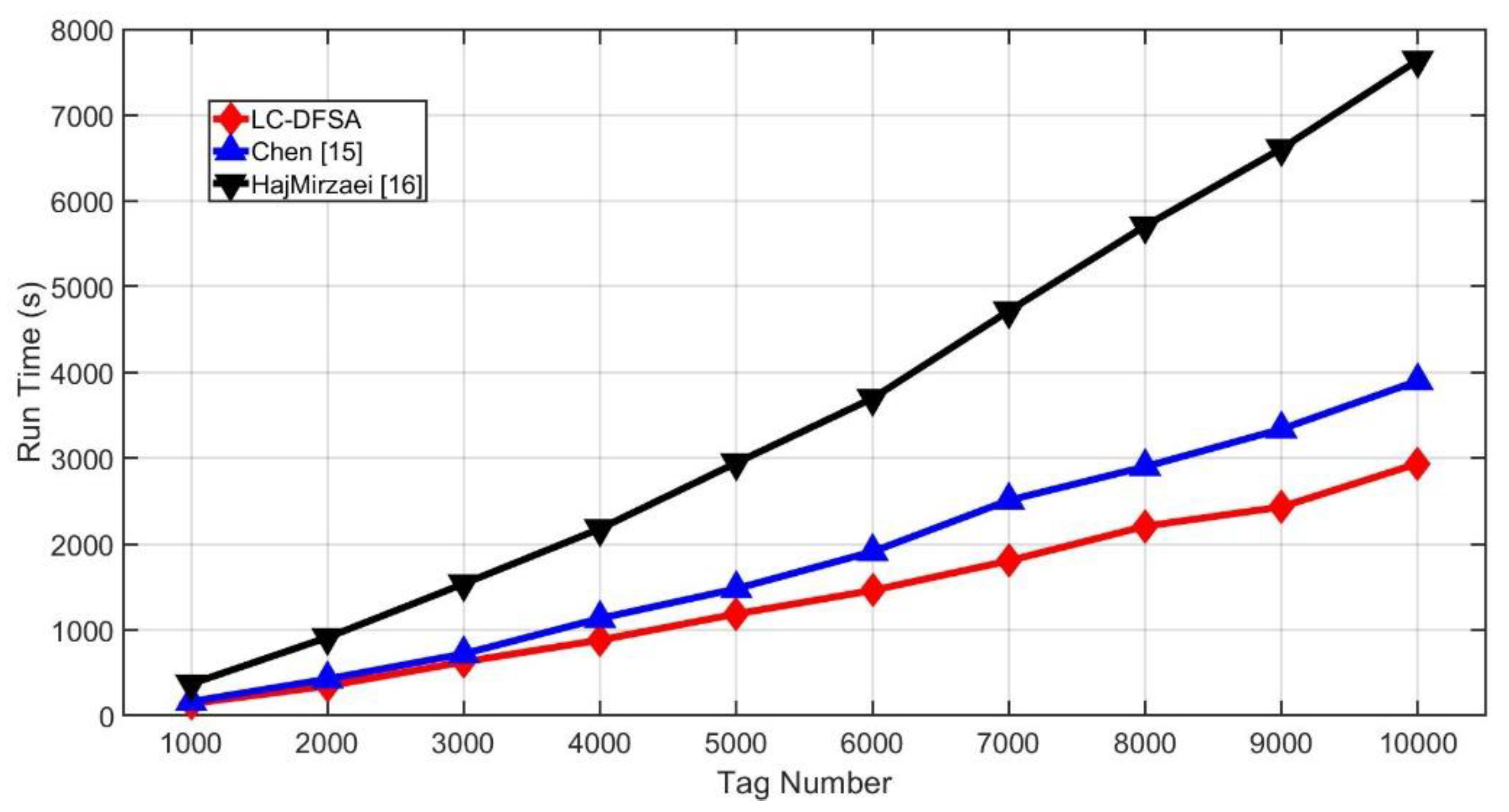
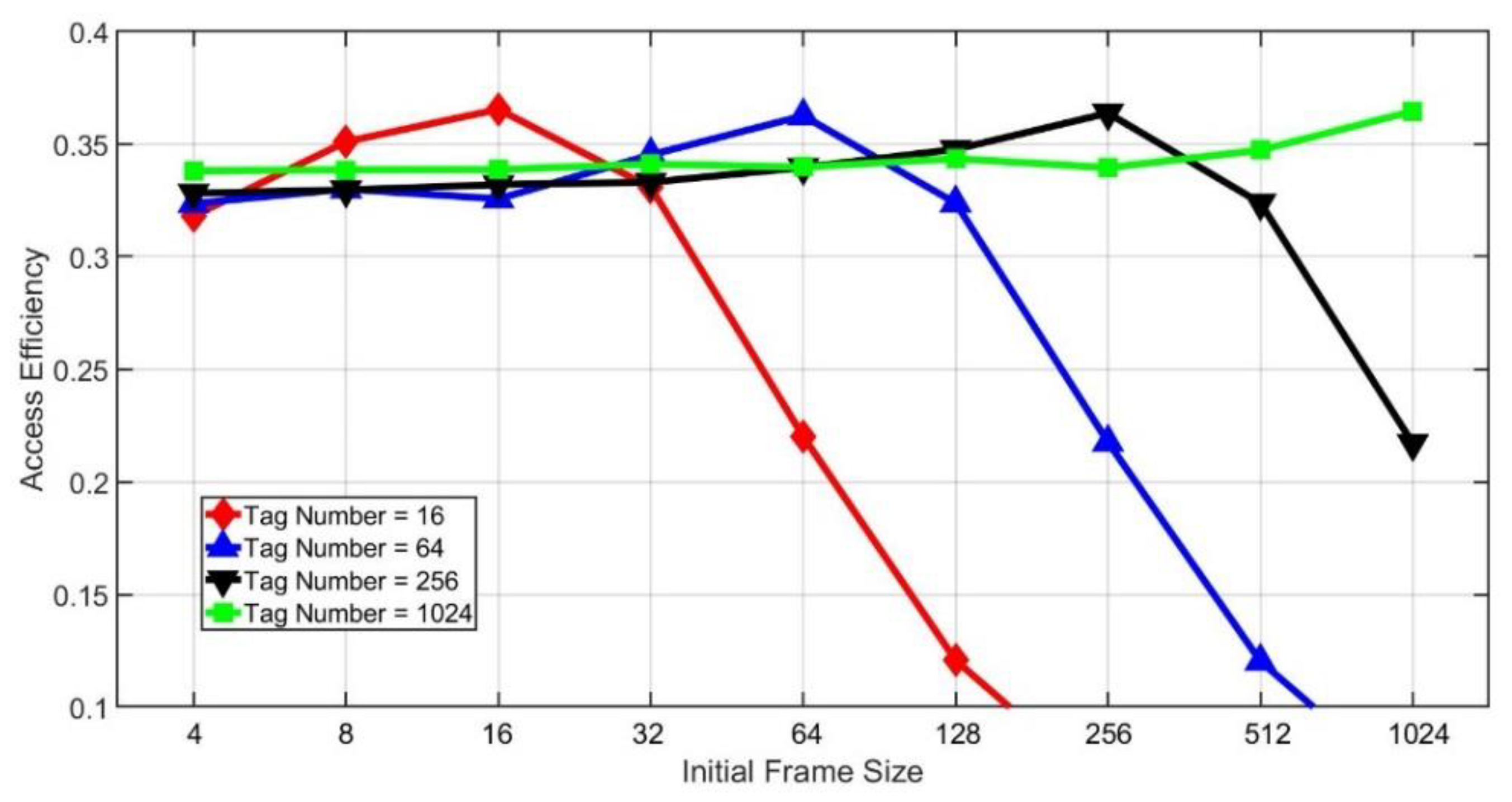
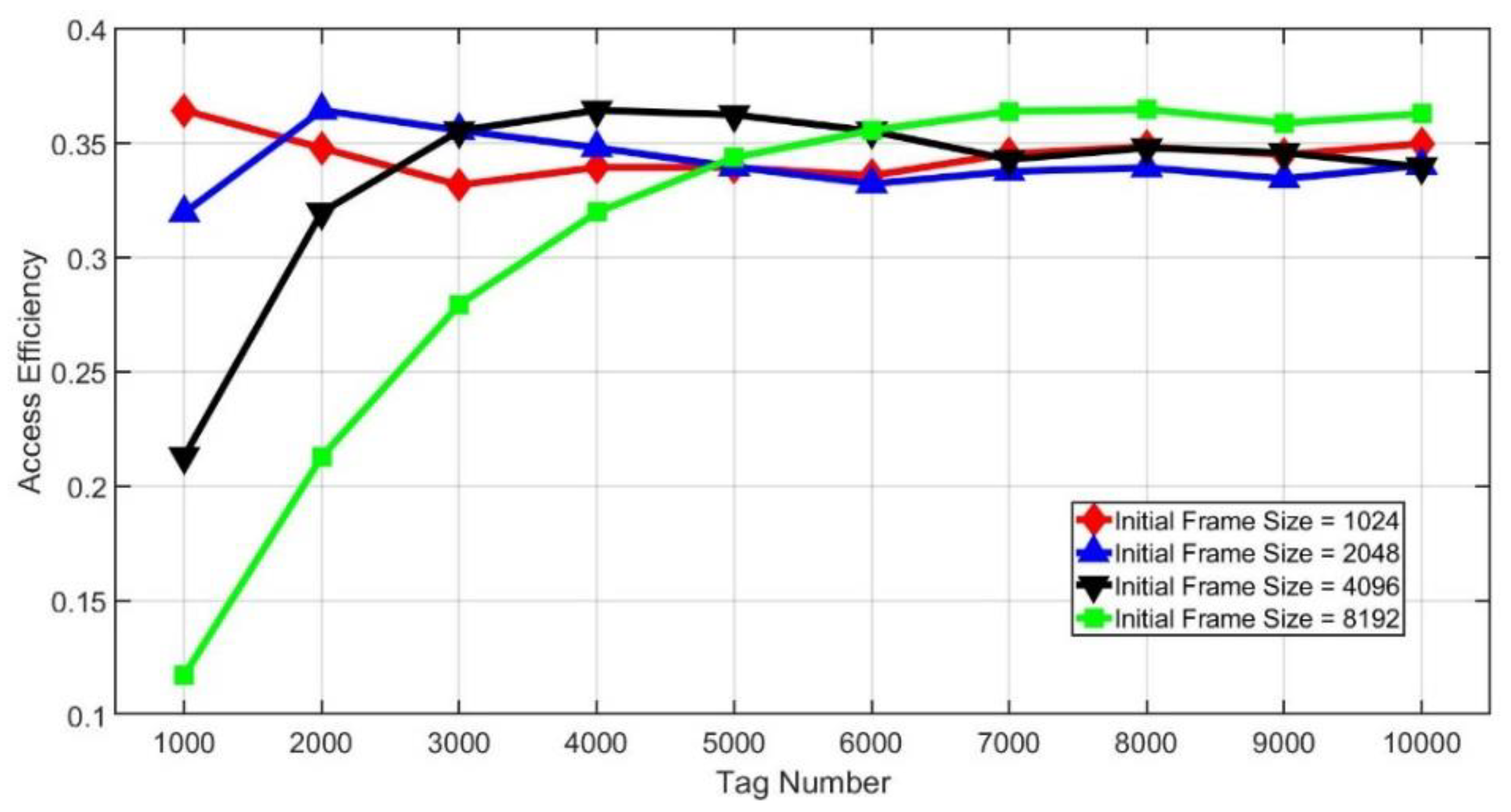
4. Simulation and Analysis
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Jayadi, R.; Lai, Y.C.; Lin, C.C. Efficient Time-Oriented Anti-Collision Protocol for RFID Tag Identification. Comput. Commun. 2017, 112, 141–153. [Google Scholar] [CrossRef]
- Su, J.; Sheng, Z.; Leung, V.C.; Chen, Y. Energy Efficient Tag Identification Algorithms for RFID: Survey, Motivation and New Design. IEEE Wirel. Commun. 2019, 26, 118–124. [Google Scholar] [CrossRef]
- Khalil, G.; Doss, R.; Chowdhury, M. A Comparison Survey Study on RFID Based Anti-Counterfeiting Systems. J. Sens. Actuator Netw. 2019, 8, 37. [Google Scholar] [CrossRef]
- Mbacke, A.A.; Mitton, N.; Rivano, H. A Survey of RFID Readers Anticollision Protocols. IEEE J. Radio Freq. Identif. 2018, 2, 38–48. [Google Scholar] [CrossRef]
- Zhou, W.; Jiang, N.; Yan, C. Research on Anti-Collision Algorithm of RFID Tags in Logistics System. Procedia Comput. Sci. 2019, 154, 460–467. [Google Scholar] [CrossRef]
- Biswal, A.K.; Jenamani, M.; Kumar, S.K. Warehouse efficiency improvement using RFID in a humanitarian supply chain: Implications for Indian food security system. Transp. Res. Part E Logist. Transp. Rev. 2018, 109, 205–224. [Google Scholar] [CrossRef]
- Ravi, S.; David, A.; Imaduddin, M. Controlling & Calibrating Vehicle-Related Issues Using RFID Technology. SSRN Electron. J. 2018, 8, 1125–1132. [Google Scholar]
- Amato, F.; Torun, H.M.; Durgin, G.D. RFID Backscattering in Long-Range Scenarios. IEEE Trans. Wirel. Commun. 2018, 17, 2718–2725. [Google Scholar] [CrossRef]
- Parada, R.; Melià-Seguí, J.; Pous, R. Anomaly Detection Using RFID-Based Information Management in an IoT Context. J. Organ. End User Comput. 2018, 30, 1–23. [Google Scholar] [CrossRef]
- Yan, L.; Xiong, D. Mobile motion robot indoor passive RFID location research. Int. J. RF Technol. Res. Appl. 2018, 9, 113–129. [Google Scholar] [CrossRef]
- ISO/IEC CD 18000-6. Information Technology—Radio Frequency Identification (RFID) for Item management—Part 6: Parameters for Air Interface Communications at 860–930 MHz. 2004. Available online: http://www.youwokeji.com.cn/down/18000-6.pdf (accessed on 22 November 2018).
- Benssalah, M.; Djeddou, M.; Dahou, B.; Drouiche, K.; Maali, A. A cooperative Bayesian and lower bound estimation in dynamic framed slotted ALOHA algorithm for RFID systems. Int. J. Commun. Syst. 2018, 31, e3723. [Google Scholar] [CrossRef]
- Chu, C.; Wen, G.; Huang, Z.; Su, J.; Han, Y. Improved Bayesian Method with Collision Recovery for RFID Anti-collision. In Proceedings of the International Conference on Artificial Intelligence and Security, New York, NY, USA, 26–28 July 2019; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Wang, Z.; Huang, S.; Fan, L.; Zhang, T.; Wang, L.; Wang, Y. Adaptive and dynamic RFID tag anti-collision based on secant iteration. PLoS ONE 2018, 13, e0206741. [Google Scholar] [CrossRef] [PubMed]
- Chen, W. A Fast Anticollision Algorithm for the EPCglobal UHF Class-1 Generation-2 RFID Standard. IEEE Commun. Lett. 2014, 18, 1519–1522. [Google Scholar] [CrossRef]
- HajMirzaei, M. Novel tag estimation method by use of Manchester coding in RFID systems. Int. J. Commun. Syst. 2019, 32, e4101. [Google Scholar] [CrossRef]
- Chen, W.T. An Accurate Tag Estimate Method for Improving the Performance of an RFID Anticollision Algorithm Based on Dynamic Frame Length ALOHA. IEEE Trans. Autom. Sci. Eng. 2009, 6, 9–15. [Google Scholar] [CrossRef]
- Klair, D.K.; Chin, K.W.; Raad, R. A Survey and Tutorial of RFID Anti-Collision Protocols. IEEE Commun. Surv. Tutor. 2010, 12, 400–421. [Google Scholar] [CrossRef]
- EPCglobal. EPC Radio-Frequency Identity Protocols Class-1 Generation-2 UHF RFID Protocol for Communications at 860 MHz–960 MHz; Version 1.2.0; EPCglobal: Brussels, Belgium, 2008. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| Tag number | |
| Frame size | |
| Expected number of successful tags in a frame | |
| Probability that a tag is successful in a slot | |
| Probability that a slot is idle | |
| Expected ratio of successful slots in a frame | |
| Expected ratio of idle slots in a frame |
| Demarcation Points | … | |||||
| Values | 5.4966 | 11.0466 | 22.1391 | 44.3208 | 88.6827 | … |
| Numbers of Tags | Optimal Frame Sizes |
|---|---|
| 3~5 | 4 |
| 6~11 | 8 |
| 12~22 | 16 |
| 23~44 | 32 |
| 45~88 | 64 |
| 89~177 | 128 |
| 178~355 | 256 |
| … | … |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Z.; Li, B.; Yang, M.; Yan, Z. LC-DFSA: Low Complexity Dynamic Frame Slotted Aloha Anti-Collision Algorithm for RFID System. Sensors 2020, 20, 228. https://doi.org/10.3390/s20010228
Jiang Z, Li B, Yang M, Yan Z. LC-DFSA: Low Complexity Dynamic Frame Slotted Aloha Anti-Collision Algorithm for RFID System. Sensors. 2020; 20(1):228. https://doi.org/10.3390/s20010228
Chicago/Turabian StyleJiang, Zhaozhe, Bo Li, Mao Yang, and Zhongjiang Yan. 2020. "LC-DFSA: Low Complexity Dynamic Frame Slotted Aloha Anti-Collision Algorithm for RFID System" Sensors 20, no. 1: 228. https://doi.org/10.3390/s20010228
APA StyleJiang, Z., Li, B., Yang, M., & Yan, Z. (2020). LC-DFSA: Low Complexity Dynamic Frame Slotted Aloha Anti-Collision Algorithm for RFID System. Sensors, 20(1), 228. https://doi.org/10.3390/s20010228