Estimating Pavement Roughness by Fusing Color and Depth Data Obtained from an Inexpensive RGB-D Sensor

 ,
,  , and
, and
Abstract
1. Introduction and Background
2. Literature Review
3. Objective and Scope
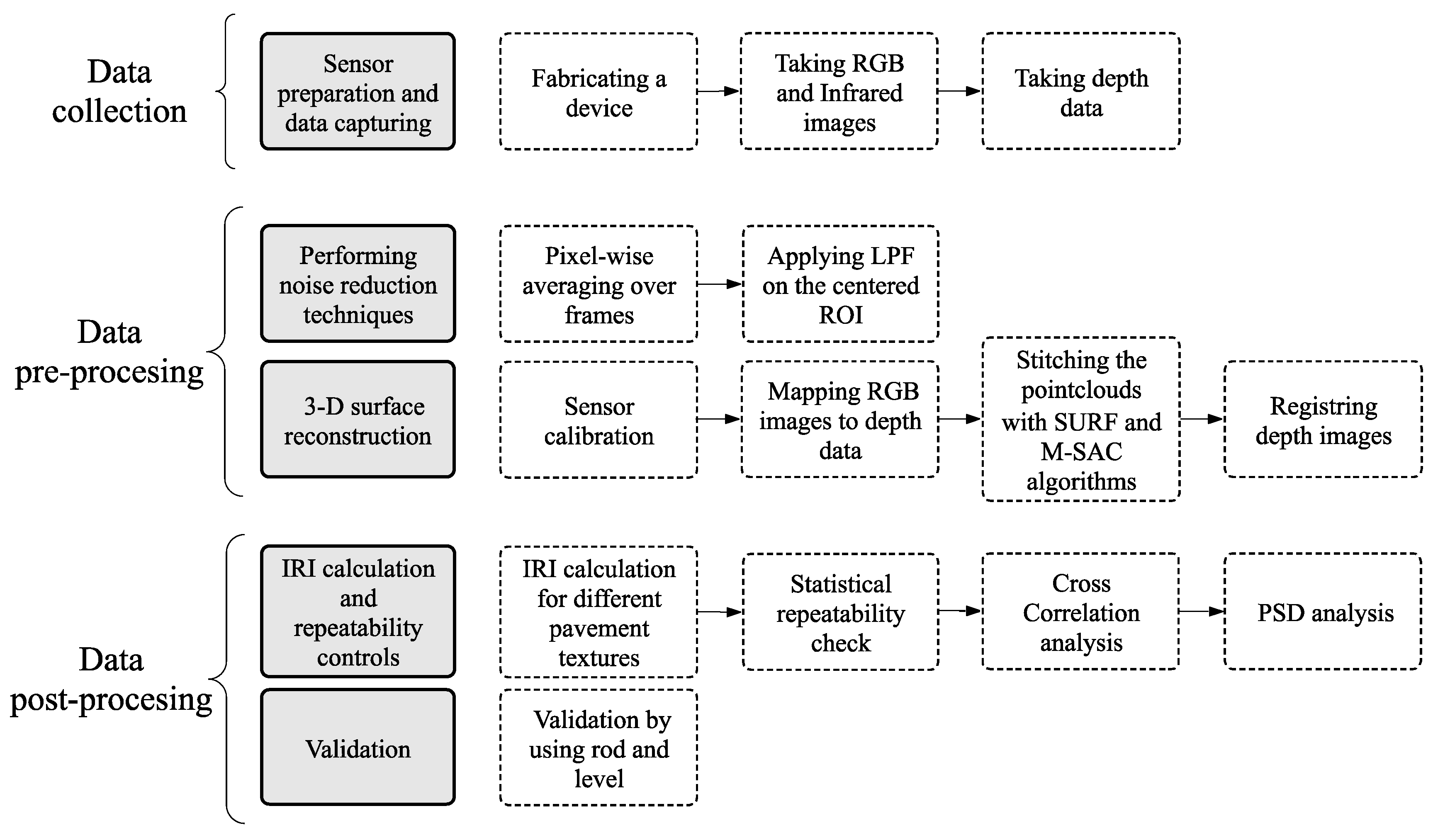
4. Research Methodology
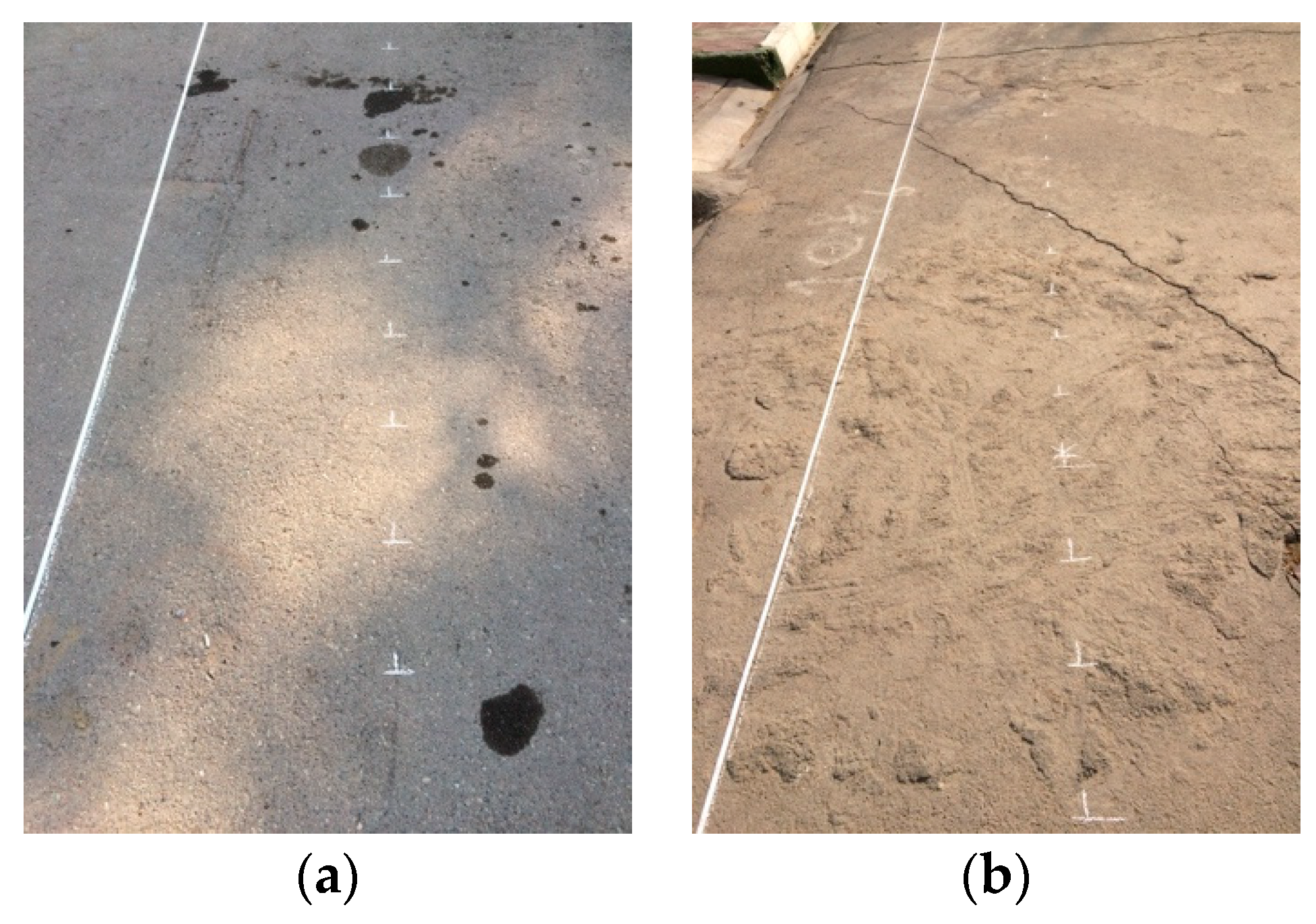
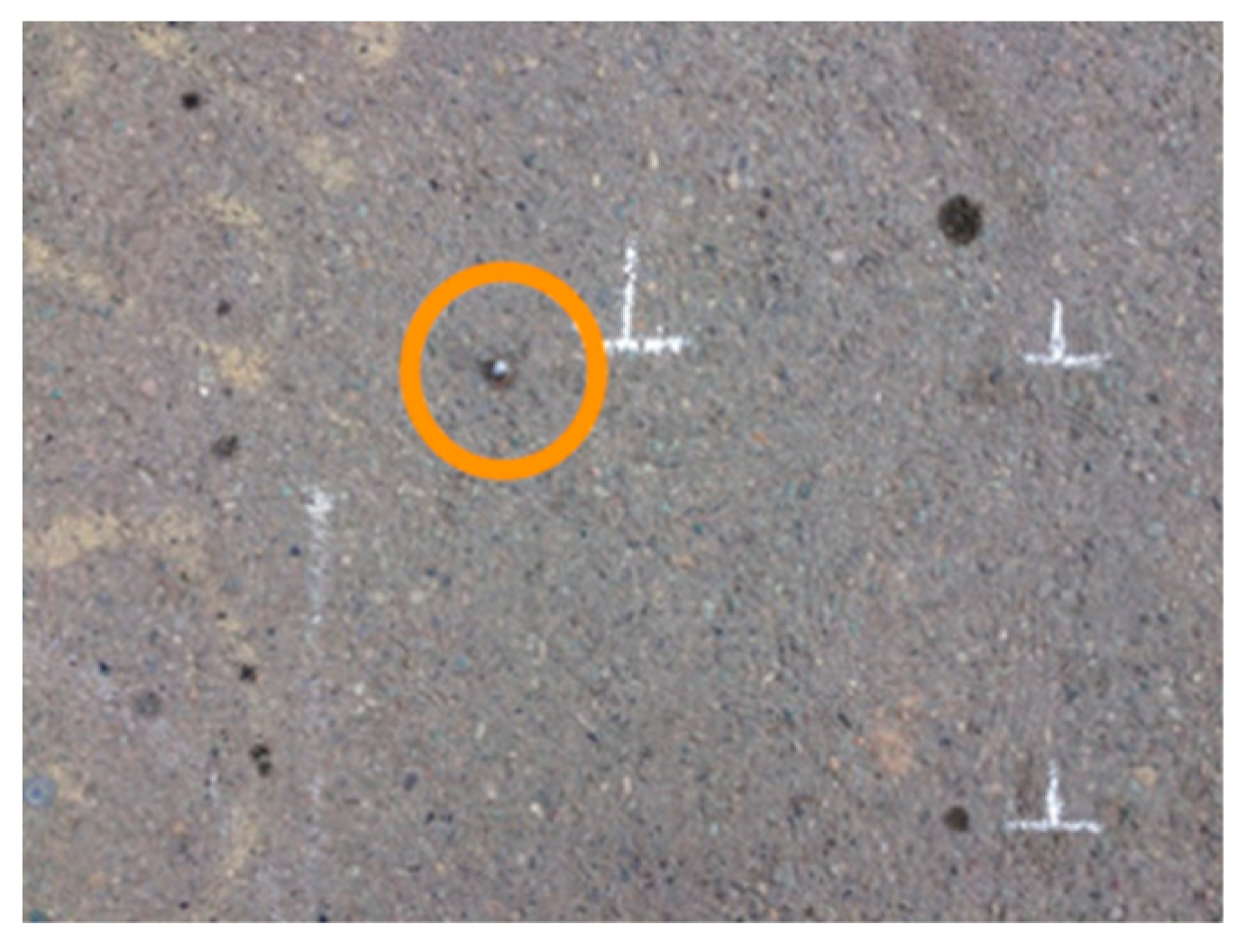
4.1. Data Collection
4.2. Data Pre-Processing
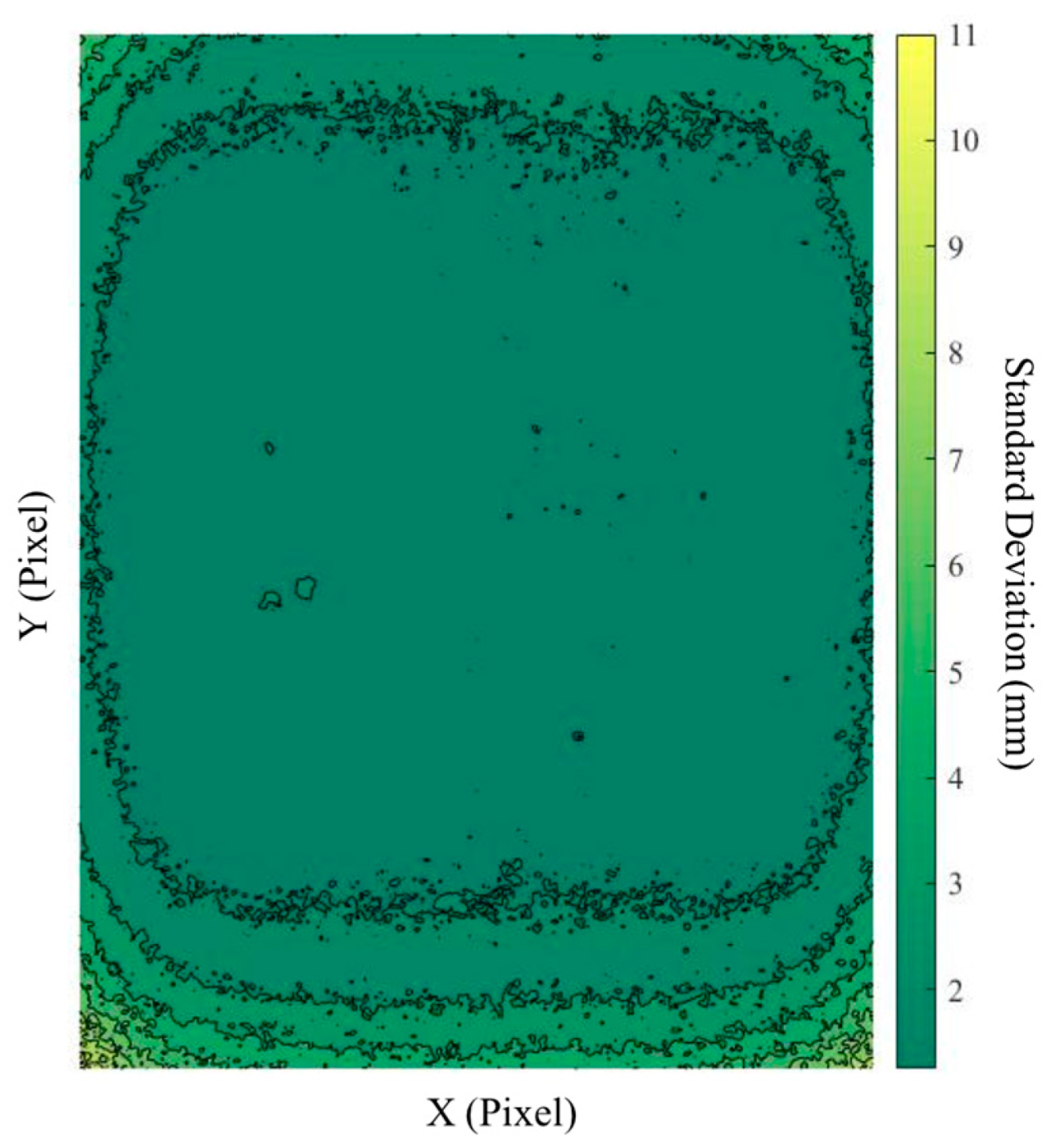
4.2.1. Performing Noise Reduction Techniques
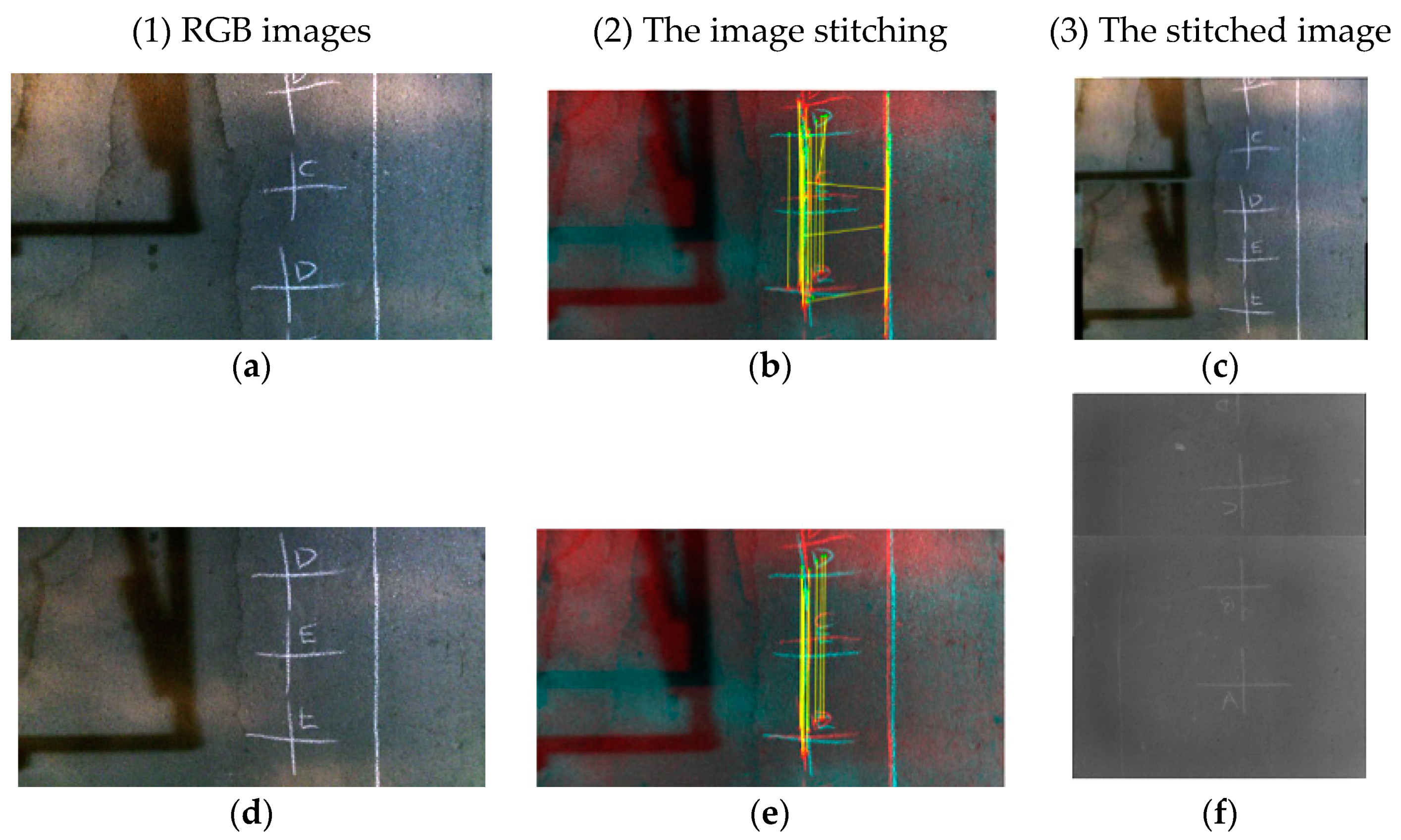
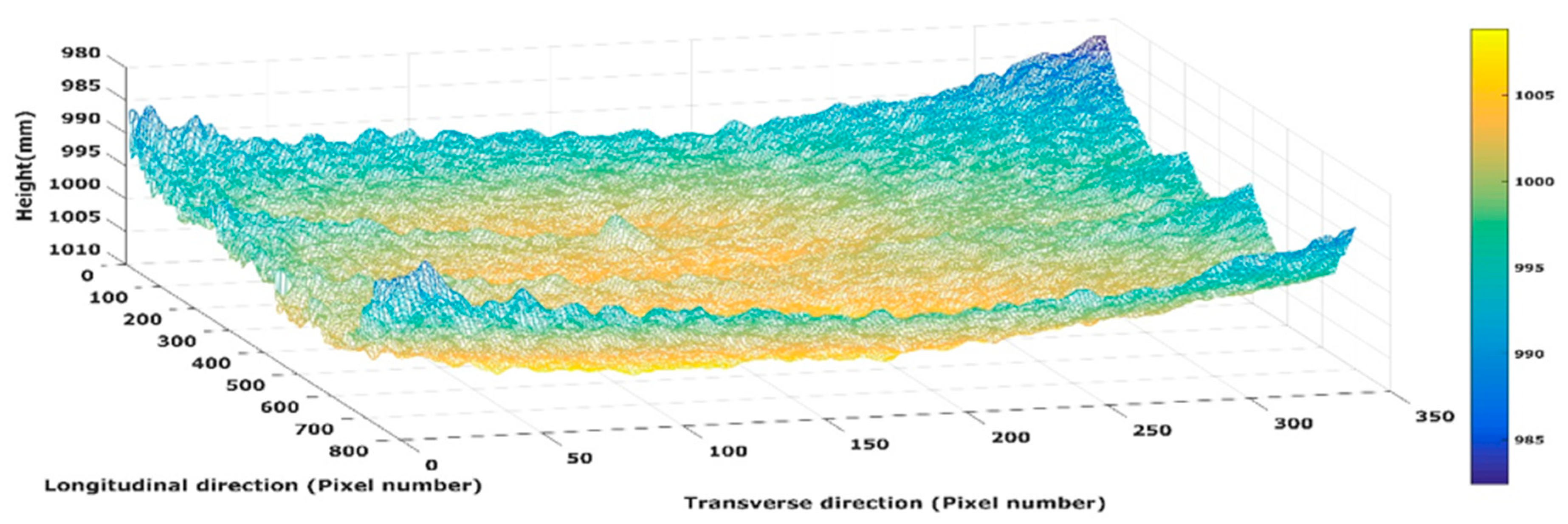
4.2.2. 3-D Surface Reconstruction
4.3. Data Post-Processing
4.3.1. IRI Calculation and Repeatability Controls
4.3.2. Validation
5. Results and Discussions
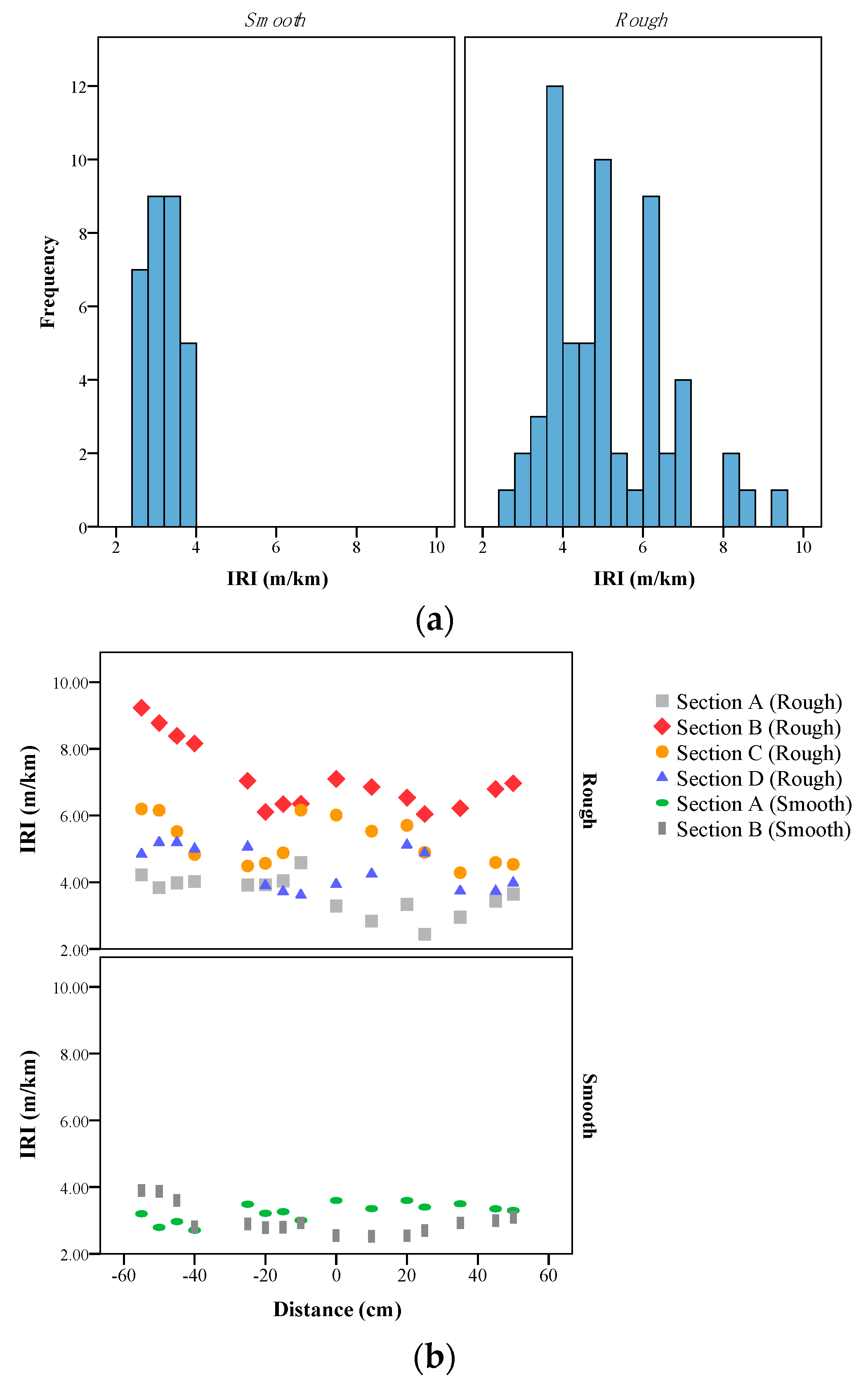
5.1. IRI Calculation for Different Pavement Textures
5.2. Statistical Repeatability Controls
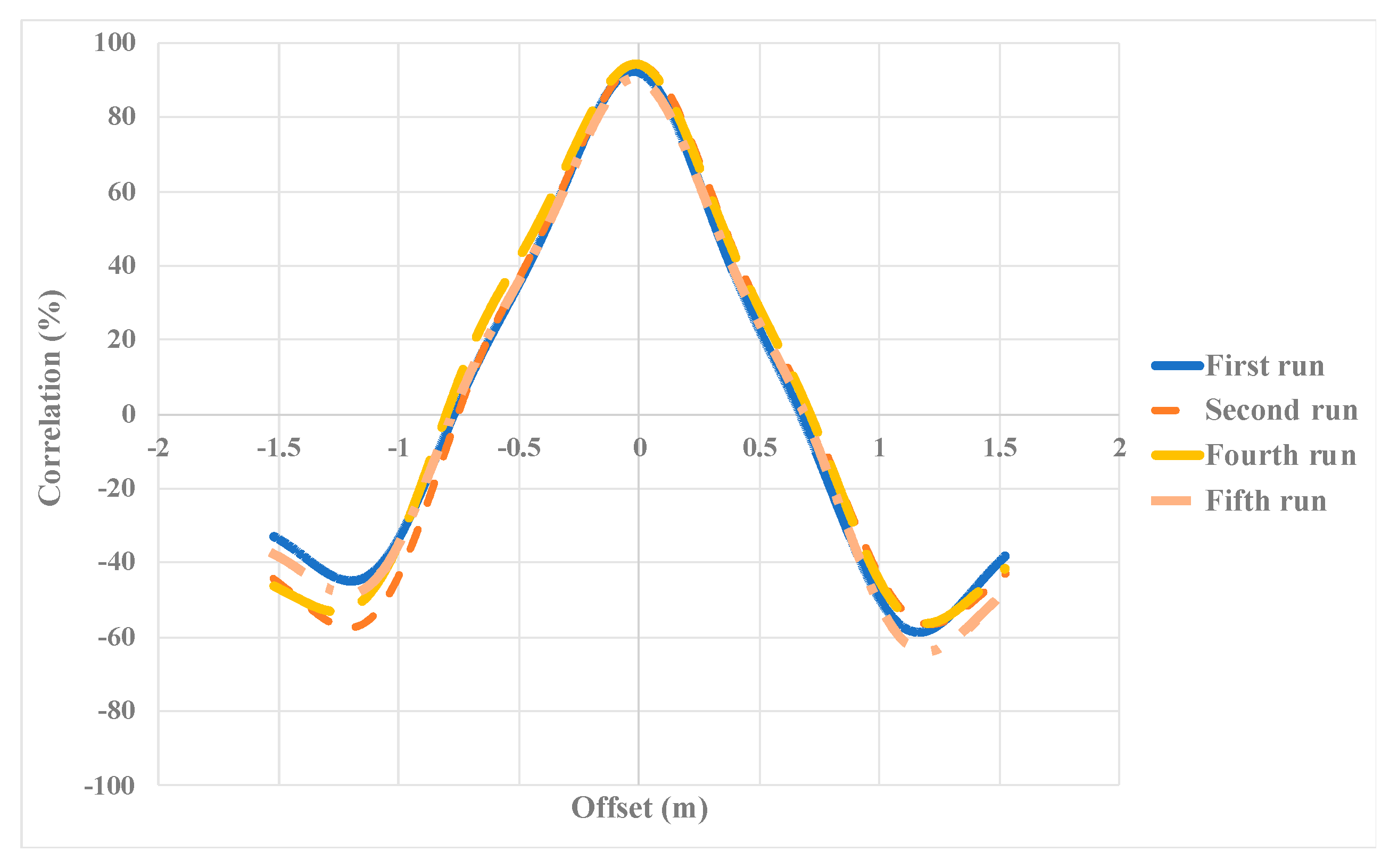
5.3. Cross-Correlation Analysis
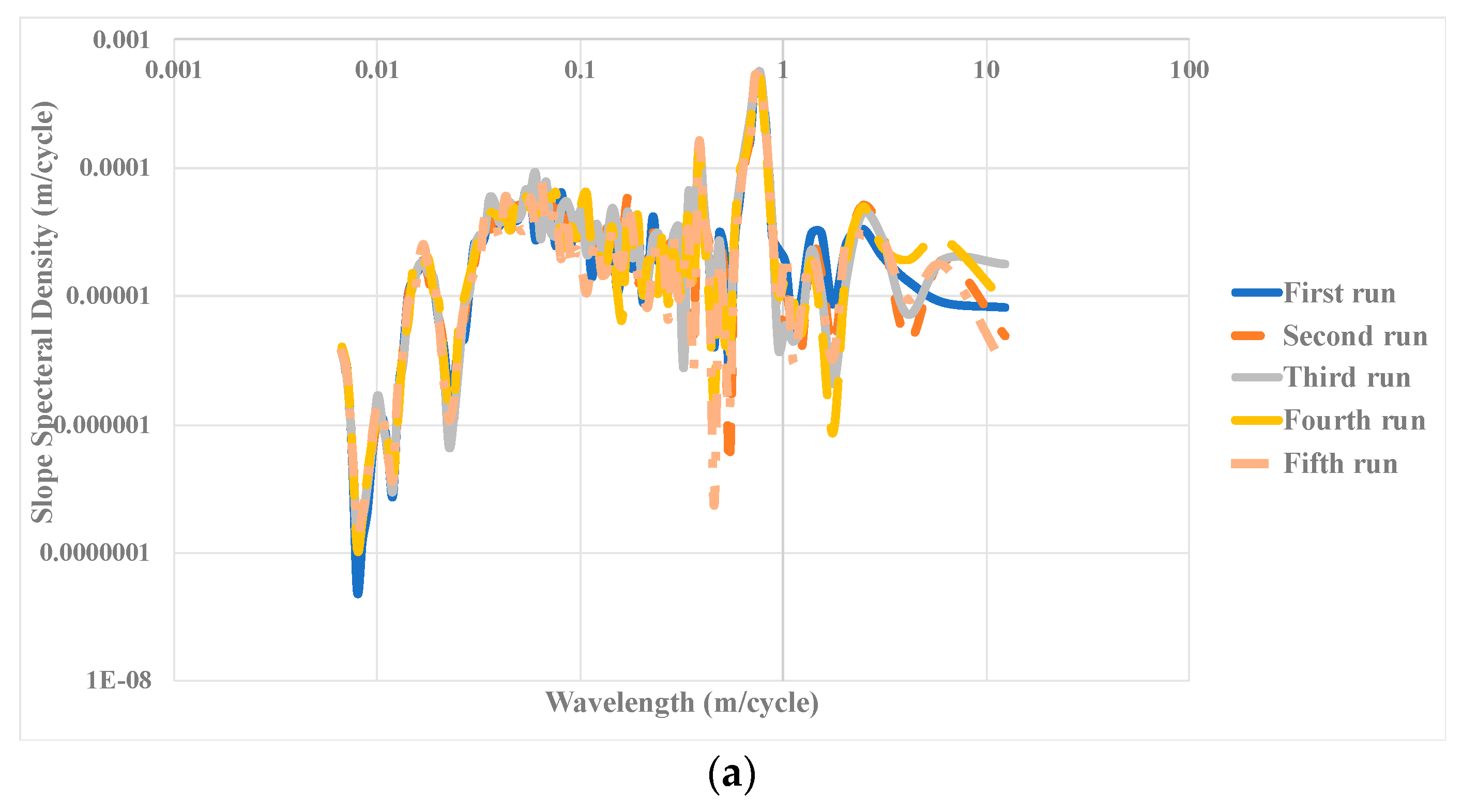
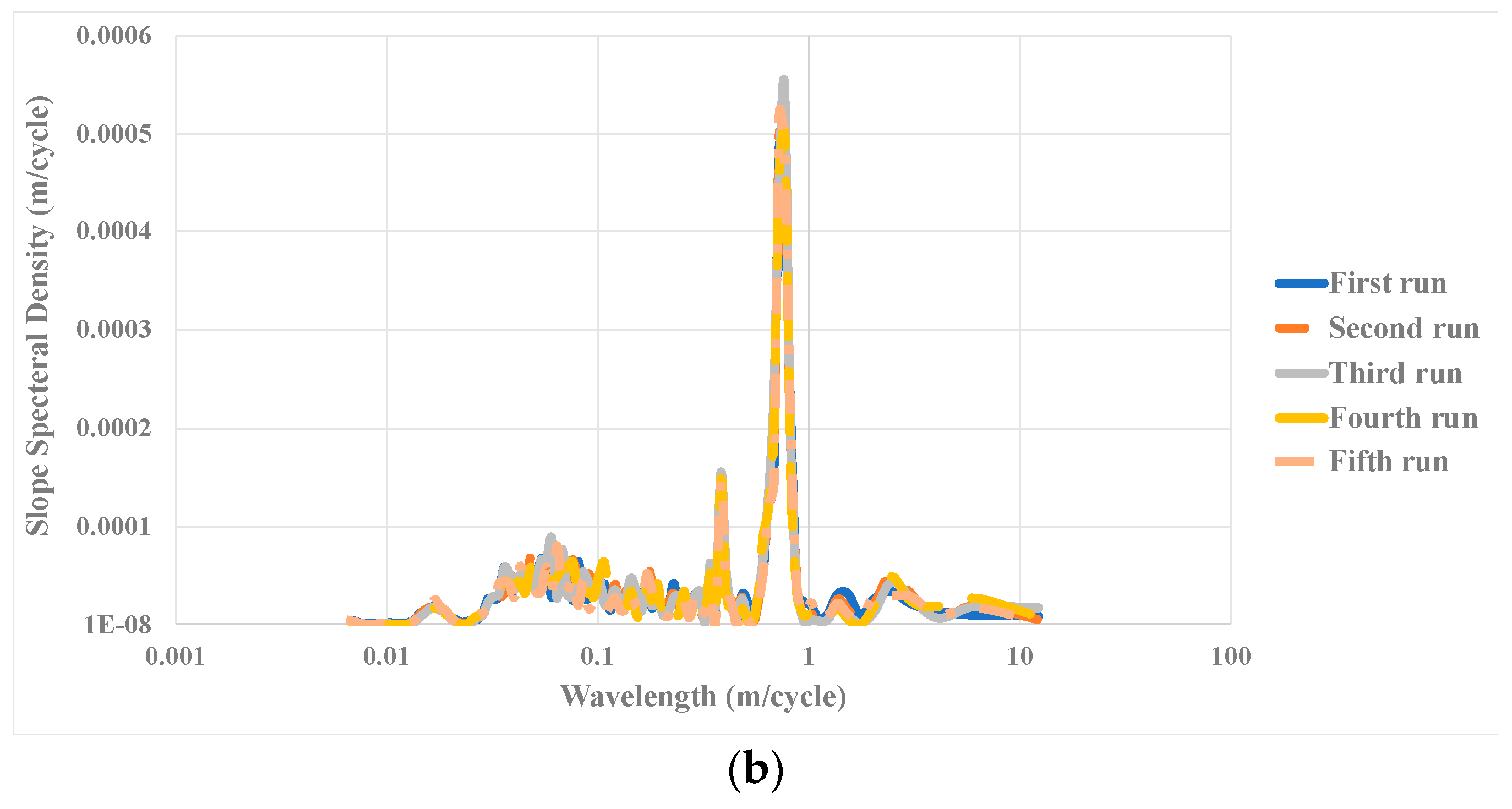
5.4. Study of Power Spectral Density (PSD)
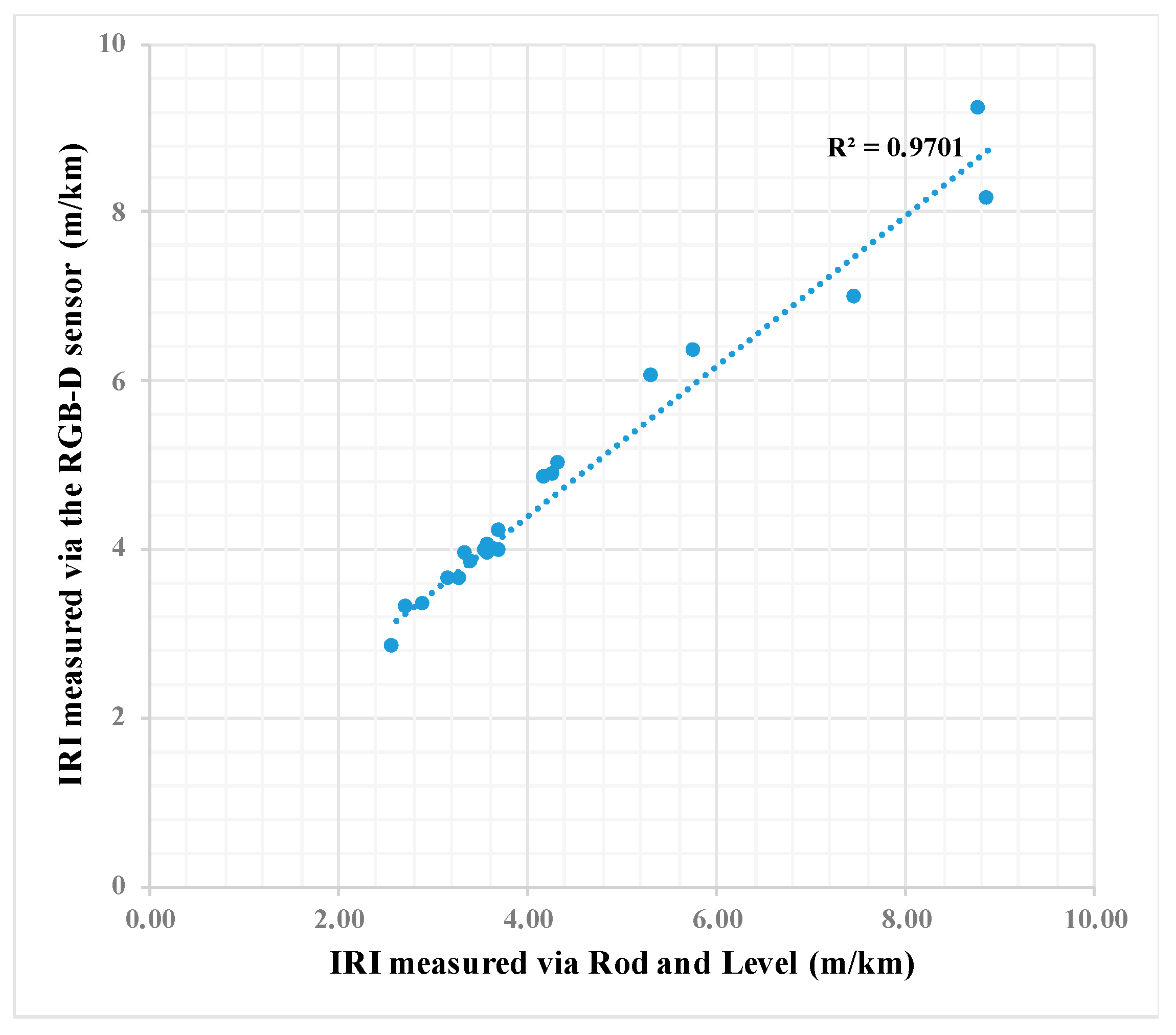
5.5. Validation
6. Future Work
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Haas, R.; Hudson, W.R.; Falls, L.C. Pavement Asset Management; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015; ISBN 9781119038849. [Google Scholar]
- ASTM International E867-Standard Terminology Relating to Vehicle-Pavement Systems; ASTM International: West Conshohocken, PA, USA, 2012. [CrossRef]
- ASTM International ASTM E1926-08 Standard Practice for Computing International Roughness Index of Roads from Longitudinal Profile Measurements; ASTM International: West Conshohocken, PA, USA, 2015. [CrossRef]
- Sayers, M.W. On the calculation of International Roughness Index from longitudinal road profile. Transp. Res. Rec. 1995, 1–12. Available online: https://trid.trb.org/view/452992 (accessed on 1 July 2018).
- Sayers, M.W.; Karamihas, S.M. The Little Book of Profiling. 1998, Volume 2. Available online: https://trid.trb.org/view/1164606 (accessed on 1 July 2018).
- Tighe, S.L.; Ningyuan, L.; Kazmierowski, T. Evaluation of semiautomated and automated pavement distress collection for network-level pavement management. Transp. Res. Rec. 2008, 2084, 11–17. [Google Scholar] [CrossRef]
- Jahanshahi, M.R.; Jazizadeh, F.; Masri, S.F.; Becerik-Gerber, B. Unsupervised approach for autonomous pavement-defect detection and quantification using an inexpensive depth sensor. J. Comput. Civ. Eng. 2013, 27, 743–754. [Google Scholar] [CrossRef]
- Liu, C.; Herman, R. Road profiles, vehicle dynamics, and human judgment of serviceability of roads: Spectral frequency domain analysis. J. Transp. Eng. 1998, 124, 106–111. [Google Scholar] [CrossRef]
- Liu, C.; Herman, R. Road profile, vehicle dynamics, and ride quality rating. J. Transp. Eng. 1999, 125, 123–128. [Google Scholar] [CrossRef]
- Cantisani, G.; Loprencipe, G. Road roughness and whole body vibration: Evaluation tools and comfort limits. J. Transp. Eng. 2010, 136, 818–826. [Google Scholar] [CrossRef]
- Zhang, Z.T.; Zhao, Q.M.; Yang, W.Q. Pavement roughness indices related to riding comfort. Appl. Mech. Mater. 2014, 505–506, 180–183. [Google Scholar] [CrossRef]
- Sun, L. Simulation of pavement roughness and IRI based on power spectral density. Math. Comput. Simul. 2003, 61, 77–88. [Google Scholar] [CrossRef]
- Alhasan, A.; White, D.J.; De Brabanter, K. Spatial pavement roughness from stationary laser scanning. Int. J. Pavement Eng. 2017, 18, 83–96. [Google Scholar] [CrossRef]
- Fernando, E.G.; Walker, R.S.; Mikhail, M. Comparative testing of lasers for ride quality measurement on hot-mix asphalt pavements. Transp. Res. Rec. 2014, 2457, 19–29. [Google Scholar] [CrossRef]
- Ahlin, K.; Granlund, N.O.J. Relating road roughness and vehicle speeds to human whole body vibration and exposure limits. Int. J. Pavement Eng. 2002, 3, 207–216. [Google Scholar] [CrossRef]
- Hesami, R.; McManus, K.J.; Evans, R.P.; Hassan, R. A comparative study of roughness indices for monitoring the performance of thin seal flexible pavements subjected to low traffic volumes in Australia. In Proceedings of the Civil, Structural and Environmental Engineering Computing, Madeira, Portugal, 1–4 September 2009. [Google Scholar] [CrossRef]
- Hesami, R.; McManus, K.J. Signal processing approach to road roughness analysis and measurement. In Proceedings of the TENCON, Singapore, 23–26 January 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Laurent, J.; Savard, Y.; Lefebvre, D. 3D laser road profiling for the automated survey of road surface conditions and geometry. In Proceedings of the 17th International Road Federation World Meeting, Saudi Arabia, 10–14 November 2013; Volume 2, p. 30. [Google Scholar] [CrossRef]
- Chang, J.; Su, Y.; Huang, T.; Kang, S.; Hsieh, S. Measurement of the International Roughness Index (IRI) using an autonomous robot (P3-AT). In Proceedings of the 26th International Symposium on Automation and Robotics in Construction, Austin, TX, USA, 24–27 June 2009; pp. 325–331. [Google Scholar] [CrossRef]
- Suksawat, B. Development of multifunction international roughness index and profile measuring device. In Proceedings of the 11th International Conference on Control, Automation and Systems, Gyeonggi-do, Korea, 26–29 October 2011; pp. 795–799, ISBN 978-89-93215-03-8. [Google Scholar]
- Zhang, Z.; Deng, F.; Huang, Y.; Bridgelall, R. Road roughness evaluation using in-pavement strain sensors. Smart Mater. Struct. 2015, 24, 115029. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, R.G. A study of pavement roughness measurement system based on laser ranger finder. In Proceedings of the International Conference on Image Analysis and Signal Processing, Linhai, China, 11–12 April 2009; pp. 295–299. [Google Scholar] [CrossRef]
- Zhao, Y. Road Condition and Road Roughness Assessment by Tire/Road Interaction Using Microphone, Dynamic Tire Pressure Sensor with an Axle Accelerometer; Northeastern University: Boston, MA, USA, 2015; ISBN 9781339337586. [Google Scholar]
- Islam, S.; Buttlar, W.G.; Aldunate, R.G.; Vavrik, W.R. Use of cellphone application to measure pavement roughness. In Proceedings of the T&DI Congress: Planes, Trains, and Automobiles, Orlando, FL, USA, 8–11 June 2014; American Society of Civil Engineers: Reston, VA, USA, 2014; pp. 553–563. [Google Scholar] [CrossRef]
- Douangphachanh, V.; Oneyama, H. A study on the use of smartphones under realistic settings to estimate road roughness condition. EURASIP J. Wirel. Commun. Netw. 2014, 2014, 1551–1564. [Google Scholar] [CrossRef]
- Douangphachanh, V.; Oneyama, H. Estimation of road roughness condition from smartphones under realistic settings. In Proceedings of the 13th International Conference on ITS Telecommunications (ITST), Tampere, Finland, 5–7 November 2013; pp. 433–439. [Google Scholar] [CrossRef]
- Yeganeh, S.F.; Mahmoudzadeh, A.; Azizpour, M.A.; Golroo, A. Validation of smartphone based pavement roughness measures. arXiv, 2019; arXiv:1902.10699. [Google Scholar]
- Mahmoudzadeh, A.; Yeganeh, S.F.; Golroo, A. Kinect, a novel cutting edge tool in pavement data collection. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 425–431. [Google Scholar] [CrossRef]
- Mankoff, K.D.; Russo, T.A. The Kinect: A low-cost, high-resolution, short-range 3D camera. Earth Surf. Process. Landf. 2013, 38, 926–936. [Google Scholar] [CrossRef]
- Zennaro, S. Evaluation of Microsoft Kinect 360 and Microsoft Kinect One for Robotics and Computer Vision Applications, Università di Padova. 2014. Available online: http://tesi.cab.unipd.it/47172/ (accessed on 30 October 2018).
- Butkiewicz, T. Low-cost coastal mapping using Kinect v2 time-of-flight cameras. In Proceedings of the 2014 Oceans–St. John’s, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–9. [Google Scholar] [CrossRef]
- Lachat, E.; Macher, H.; Mittet, M.-A.; Landes, T.; Grussenmeyer, P. First experiences with kinect V2 sensor for close range 3D modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 93–100. [Google Scholar] [CrossRef]
- Fankhauser, P.; Bloesch, M.; Rodriguez, D.; Kaestner, R.; Hutter, M.; Siegwart, R. Kinect v2 for mobile robot navigation: Evaluation and modeling. In Proceedings of the International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015; pp. 388–394. [Google Scholar] [CrossRef]
- Achar, S.; Bartels, J.R.; Whittaker, W.L.; Kutulakos, K.N.; Narasimhan, S.G. Epipolar time-of-flight imaging. ACM Trans. Graph. 2017, 36, 1–8. [Google Scholar] [CrossRef]
- Lindner, M.; Schiller, I.; Kolb, A.; Koch, R. Time-of-Flight sensor calibration for accurate range sensing. Comput. Vis. Image Underst. 2010, 114, 1318–1328. [Google Scholar] [CrossRef]
- Breuer, T.; Bodensteiner, C.; Arens, M. Low-cost commodity depth sensor comparison and accuracy analysis. In Proceedings of the SPIE Electro-Optical Remote Sensing, Photonic Technologies, and Applications VIII; and Military Applications in Hyperspectral Imaging and High Spatial Resolution Sensing II, Amsterdam, Netherlands, 22–23 September 2014; Volume 9250. [Google Scholar] [CrossRef]
- Chow, J.C.K.; Ang, K.D.; Lichti, D.D.; Teskey, W.F. Performance analysis of a low-cost triangulation-based 3D camera: Microsoft Kinect system. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 175–180. [Google Scholar] [CrossRef]
- Stoyanov, T.; Mojtahedzadeh, R.; Andreasson, H.; Lilienthal, A.J. Comparative evaluation of range sensor accuracy for indoor mobile robotics and automated logistics applications. Robot. Auton. Syst. 2013, 61, 1094–1105. [Google Scholar] [CrossRef]
- Jahanshahi, M.R.; Masri, S.F.; Padgett, C.W.; Sukhatme, G.S. An innovative methodology for detection and quantification of cracks through incorporation of depth perception. Mach. Vis. Appl. 2013, 24, 227–241. [Google Scholar] [CrossRef]
- Moazzam, I.; Kamal, K.; Mathavan, S.; Usman, S.; Rahman, M. Metrology and visualization of potholes using the microsoft kinect sensor. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems, The Hague, The Netherlands, 6–9 October 2013; pp. 1284–1291. [Google Scholar] [CrossRef]
- Kamal, K.; Mathavan, S.; Zafar, T.; Moazzam, I.; Ali, A.; Ahmad, S.U.; Rahman, M. Performance assessment of Kinect as a sensor for pothole imaging and metrology. Int. J. Pavement Eng. 2018, 19, 1565–1576. [Google Scholar] [CrossRef]
- Chen, Y.L.; Jahanshahi, M.R.; Manjunatha, P.; Gan, W.P.; Abdelbarr, M.; Masri, S.F.; Becerik-Gerber, B.; Caffrey, J.P. Inexpensive multimodal sensor fusion system for autonomous data acquisition of road surface conditions. IEEE Sens. J. 2016, 16, 7731–7743. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, C.; Wu, Q.; Lu, Q.; Zhang, S.; Zhang, G.; Yang, Y. A Kinect-Based Approach for 3D Pavement Surface Reconstruction and Cracking Recognition. IEEE Trans. Intell. Transp. Syst. 2018, 99, 1–12. [Google Scholar] [CrossRef]
- Camera Calibration Toolbox for Matlab. Available online: http://www.vision.caltech.edu/bouguetj/calib_doc/ (accessed on 15 May 2016).
- Bay, H.; Ess, A. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Brown, M.; Lowe, D. Automatic panoramic stitching using invariant features. Int. J. Comput. Vis. 2007, 74, 59–73. [Google Scholar] [CrossRef]
- Torr, P.H.S.; Zisserman, A. MLESAC: A new robust estimator with application to estimating image geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef]
- Scaramuzza, D.; Cadena, C.; Leonard, J.J.; Carrillo, H.; Latif, Y.; Reid, I.; Neira, J.; Carlone, L. Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Dong, N.; Ren, X.; Sun, M.; Jiang, C.; Zheng, H. Fast stereo aerial image construction and measurement for emergency rescue. In Proceedings of the International Conference on Geo-Information Technologies for Natural Disaster Management, Mississauga, ON, Canada, 9–11 October 2013; pp. 119–123. [Google Scholar] [CrossRef]
- Lu, J.; Bai, Y. Research on low altitude aerial image stitching. In Proceedings of the Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 9292–9296. [Google Scholar] [CrossRef]
- Tsao, P.; Chen, G. Stitching aerial images for vehicle positioning and tracking. In Proceedings of the International Conference on Data Mining Workshops (ICDMW), Singapore, 17–20 November 2018; pp. 616–623. [Google Scholar] [CrossRef]
- ASTM International E1364-95 Standard Test Method for Measuring Road Roughness by Static Level Method 1; ASTM International: West Conshohocken, PA, USA, 1996; pp. 1–6. [CrossRef]
- Khoshelham, K. Accuracy analysis of Kinect depth data. In Proceedings of the ISPRS—International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Calgary, AB, Canada, 29–31 August 2012; Volume XXXVIII-5/W12, pp. 133–138. [Google Scholar] [CrossRef]
- ProVAL. ProVAL User’s Guide; PROVAL: Austin, TX, USA, 2015; Available online: http://www.roadprofile.com/download/ProVAL-3.60-Users-Guide.pdf2015 (accessed on 15 September 2015).
- Karamihas, S.M. Development of cross correlation for objective comparison of profiles. Int. J. Veh. Des. 2002, 36, 173–193. [Google Scholar] [CrossRef]
- FHWA-HRT-05-054. Quantification of Smoothness Index Differences Related to Long-Term Pavement Performance Equipment Type. Available online: https://www.fhwa.dot.gov/publications/research/infrastructure/pavements/ltpp/05054/chapt4.cfm (accessed on 24 October 2018).
- Loizos, A.; Plati, C. Evolutional process of pavement roughness evaluation benefiting from sensor technology. Int. J. Smart Sens. Intell. Syst. 2008, 1, 370–387. [Google Scholar] [CrossRef]
- Gonzalez, R.; Rodriguez, F.; Guzman, J.L.; Pradalier, C.; Siegwart, R. Combined visual odometry and visual compass for off-road mobile robots localization. Robotica 2012, 30, 865–878. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IRI Values (m/km) | Frequency | Average (m/km) | Standard Deviation (m/km) | Standard Error | 95% Confidence Interval | Min IRI (m/km) | Max IRI (m/km) |
|---|---|---|---|---|---|---|---|
| 2–4 | 48 | 3.29 | 0.45 | 0.066 | 3.15–3.42 | 2.44 | 3.98 |
| 4–6 | 23 | 4.79 | 0.47 | 0.097 | 4.59–4.99 | 4.02 | 5.7 |
| 6–8 | 15 | 6.45 | 0.39 | 0.1 | 6.24–6.67 | 6.01 | 7.1 |
| 8–10 | 4 | 8.63 | 0.23 | 0.23 | 7.89–9.38 | 8.16 | 9.23 |
| IRI Values (m/km) | Pavement Type | Frequency | Average (m/km) | Standard Deviation (m/km) | Standard Error | 95% Confidence Interval | Min IRI (m/km) | Max IRI (m/km) |
|---|---|---|---|---|---|---|---|---|
| 1.5–3.5 | New pavements | 31 | 3.01 | 0.31 | 0.055 | 2.9–3.13 | 2.44 | 3.5 |
| 2.5-6 | Older pavement | 70 | 3.79 | 0.83 | 0.099 | 3.59–3.99 | 2.53 | 5.70 |
| 3.5-10 | Maintained unpaved | 60 | 5.16 | 1.42 | 0.183 | 4.79–5.52 | 3.5 | 9.23 |
| Segments | Average of IRI (SD) (m/km) | CoV | Sum of Square | Mean Square (Between Groups) | Significance | F. |
|---|---|---|---|---|---|---|
| First | 3.63 (0.144) | 0.040 | 0.02 | 0.005 | 1 | 0.15 |
| Second | 7.12 (0.225) | 0.032 | 0.032 | 0.008 | 1 | 0.007 |
| Third | 5.22 (0.203) | 0.039 | 0.02 | 0.005 | 1 | 0.009 |
| Fourth | 4.41 (0.235) | 0.053 | 0.520 | 0.130 | 0.880 | 0.295 |
| First Run | Second Run | Third Run | Fourth Run | Fifth Run | Average | |
|---|---|---|---|---|---|---|
| IRI (m/km) | 3.9 | 4.08 | 3.92 | 3.93 | 3.77 | 3.92 |
| Error in measuring the IRI between each run and the mean (%) | 0.51 | 4.08 | 0.00 | 0.26 | 3.83 | 1.73 |
| Cross-correlation between each run and the basis run (%) | 92.5 | 94.2 | - | 94.2 | 90.5 | 92.85 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahmoudzadeh, A.; Golroo, A.; Jahanshahi, M.R.; Firoozi Yeganeh, S. Estimating Pavement Roughness by Fusing Color and Depth Data Obtained from an Inexpensive RGB-D Sensor. Sensors 2019, 19, 1655. https://doi.org/10.3390/s19071655
Mahmoudzadeh A, Golroo A, Jahanshahi MR, Firoozi Yeganeh S. Estimating Pavement Roughness by Fusing Color and Depth Data Obtained from an Inexpensive RGB-D Sensor. Sensors. 2019; 19(7):1655. https://doi.org/10.3390/s19071655
Chicago/Turabian StyleMahmoudzadeh, Ahmadreza, Amir Golroo, Mohammad R. Jahanshahi, and Sayna Firoozi Yeganeh. 2019. "Estimating Pavement Roughness by Fusing Color and Depth Data Obtained from an Inexpensive RGB-D Sensor" Sensors 19, no. 7: 1655. https://doi.org/10.3390/s19071655
APA StyleMahmoudzadeh, A., Golroo, A., Jahanshahi, M. R., & Firoozi Yeganeh, S. (2019). Estimating Pavement Roughness by Fusing Color and Depth Data Obtained from an Inexpensive RGB-D Sensor. Sensors, 19(7), 1655. https://doi.org/10.3390/s19071655