Flexible Three-Dimensional Reconstruction via Structured-Light-Based Visual Positioning and Global Optimization


Abstract
:1. Introduction
2. Related Work
3. System Architecture and Optimization Algorithm
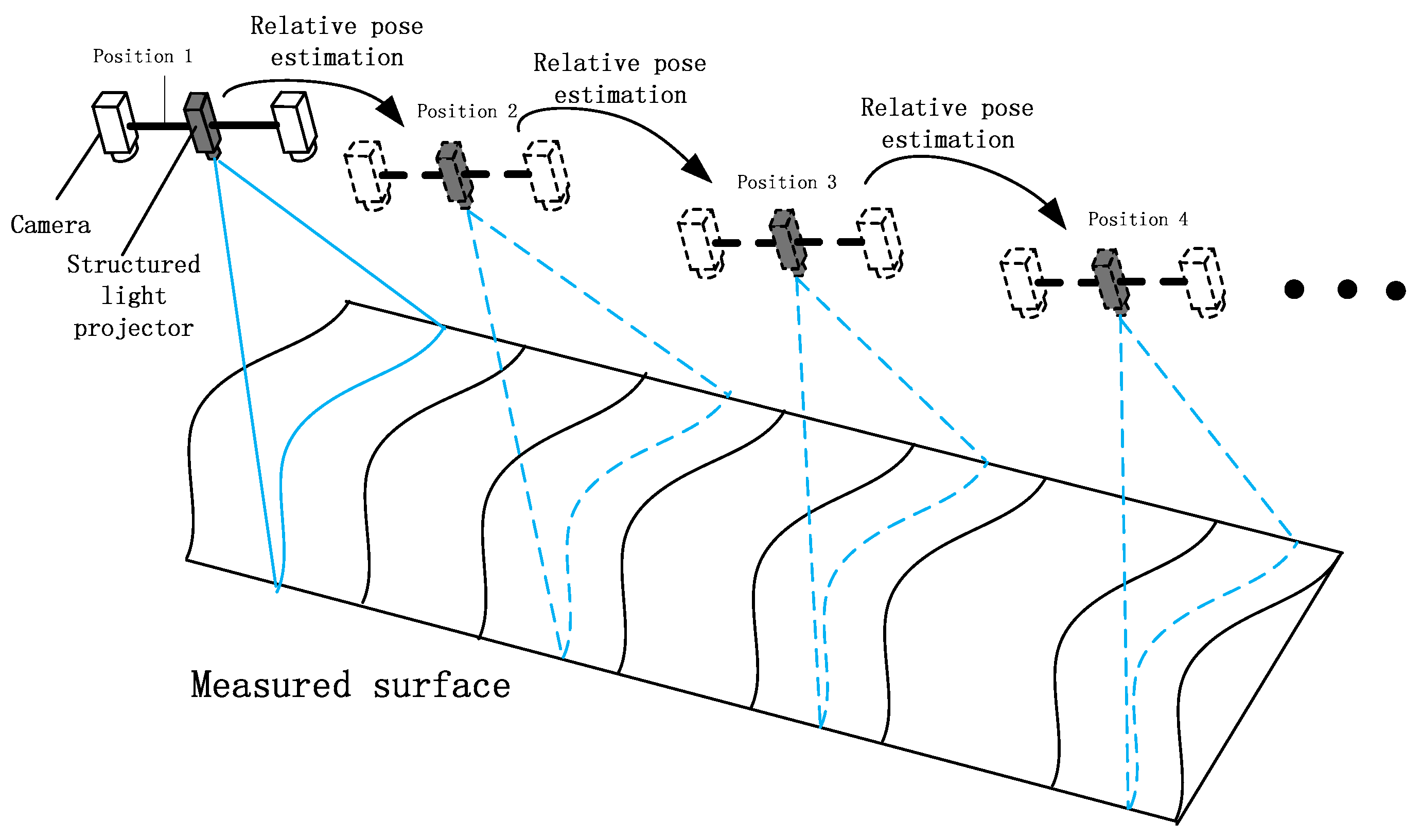
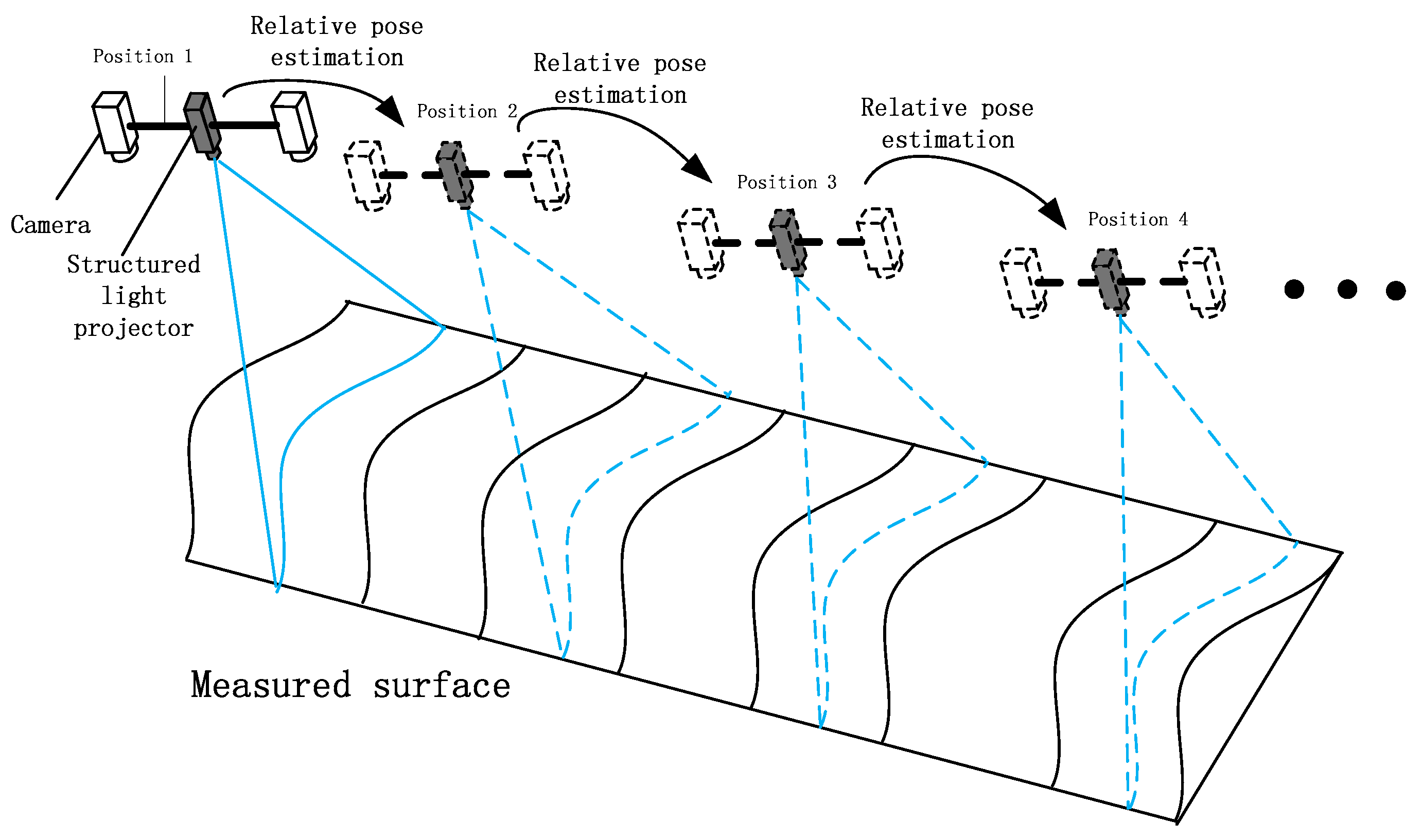
3.1. System Localization Method
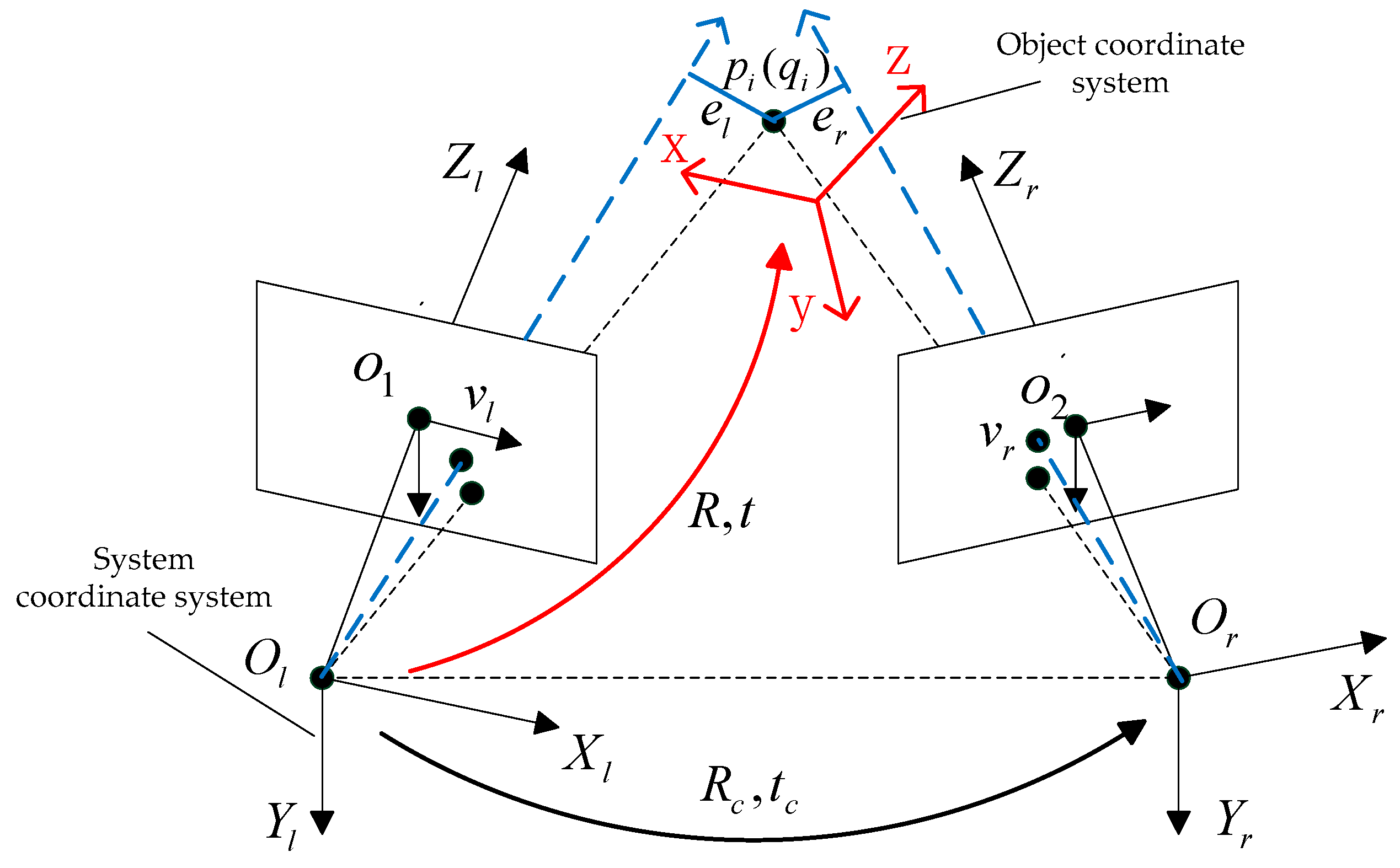
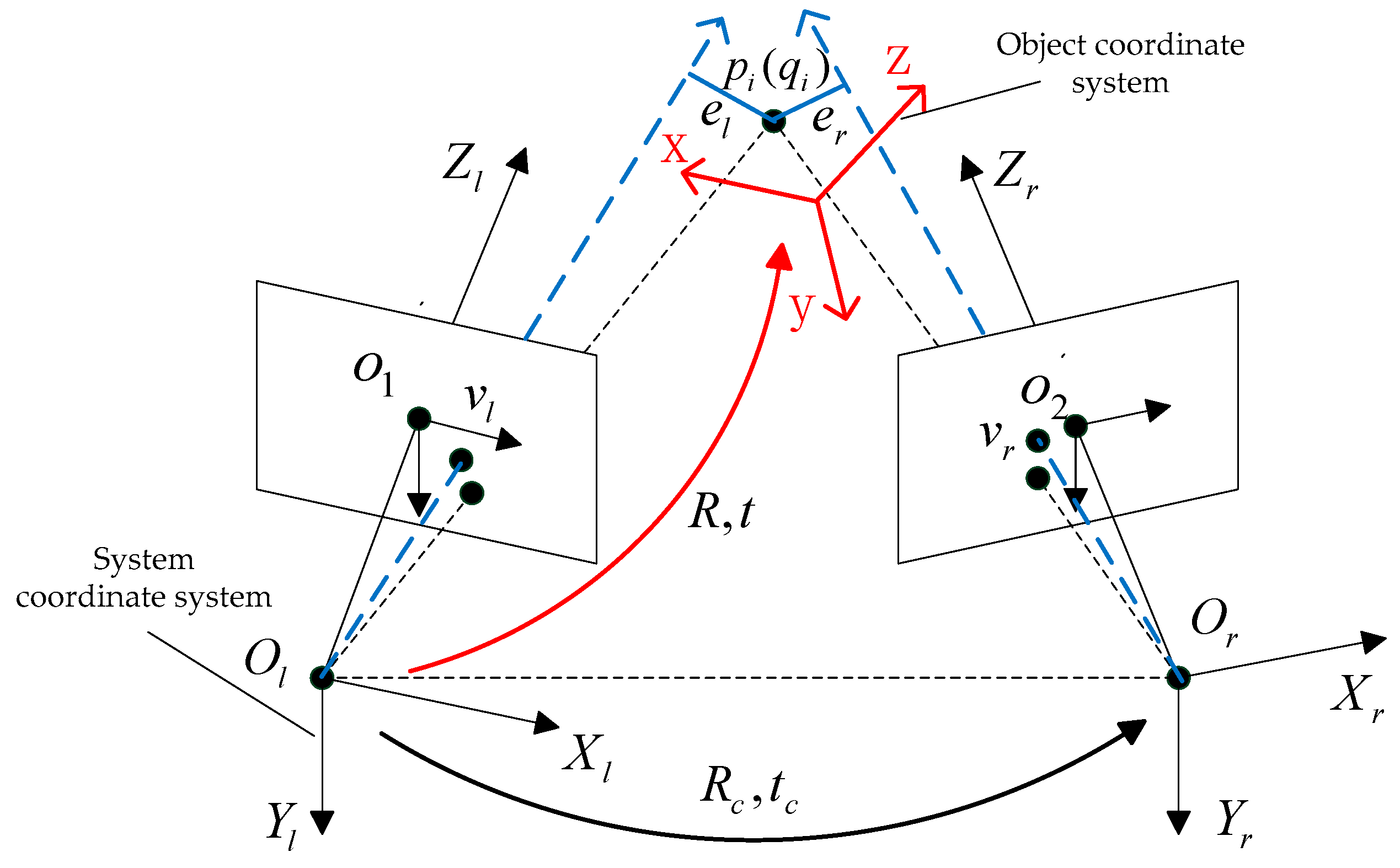
3.1.1. Extended Binocular Orthogonal Iterative Algorithm
3.1.2. Calculation Process of Localization Algorithm
- Step 1:
- The ORB features [27] of the binocular camera’s left and right images at the current position are extracted and matched.
- Step 2:
- The mismatches are removed through the RANSAC algorithm [28].
- Step 3:
- The 3D coordinates of the feature points at the current position are calculated from the extrinsic parameters of the binocular camera by the triangular method, and then these coordinates are saved to generate 3D point set.
- Step 4:
- The ORB feature points of the image captured at the next position (or another position) corresponding to the current 3D point set are extracted by feature point tracking method.
- Step 5:
- Based on the current 3D point set and the pixel coordinates of the matching points on the left and right images of the next position (or another position),the relative pose of the current and the next position (or another position) is calculated by the extended orthogonal iterative algorithm presented in Section 3.1.1.
- Step 6:
- Steps 1 to 5 are repeated to obtain the relative pose of the system at each adjacent positions. When we define the system coordinate system at the first position as the world coordinate system, the system poses at each position relative to the world coordinate system can be obtained from the relative pose of the system between each adjacent positions.
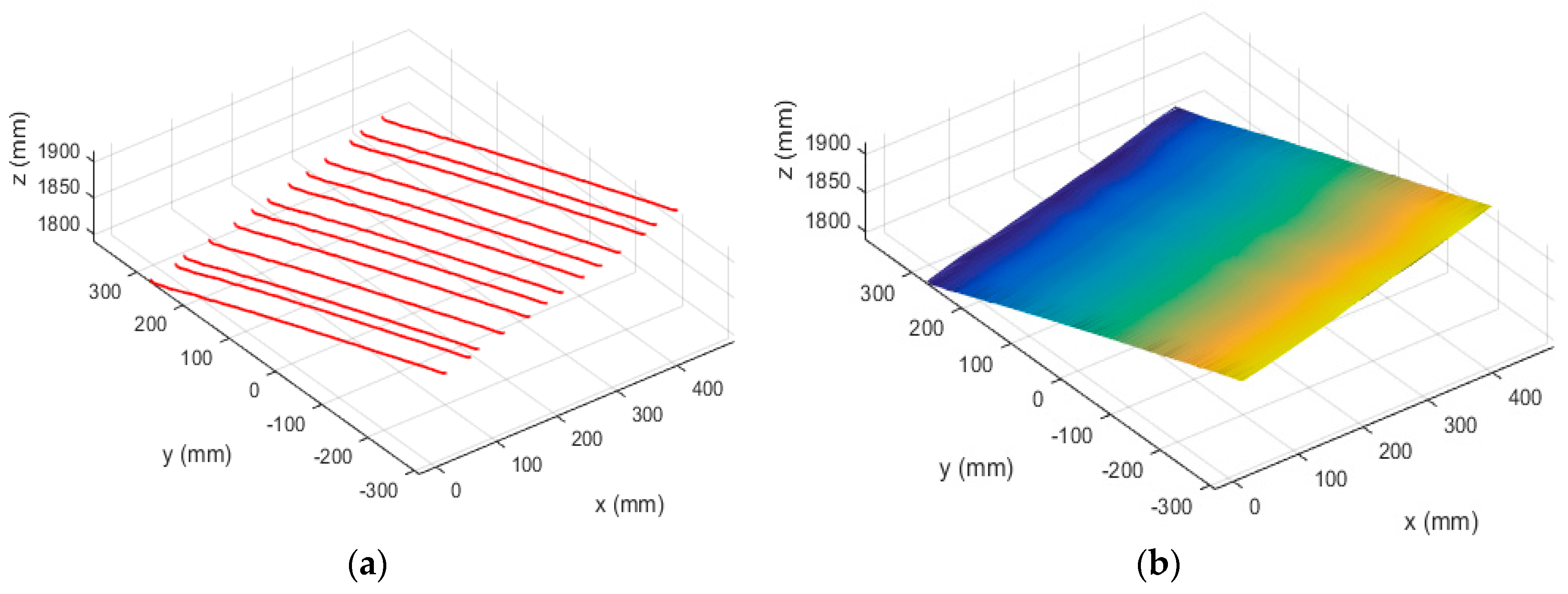
3.2. Light Stripe Extraction and Splicing Method
3.3. Global Optimization Algorithm of Pose Estimation
3.3.1. Global Optimization Method of Rotation Matrices
3.3.2. Global Optimization Method of Translation Vectors
4. Experiment Results
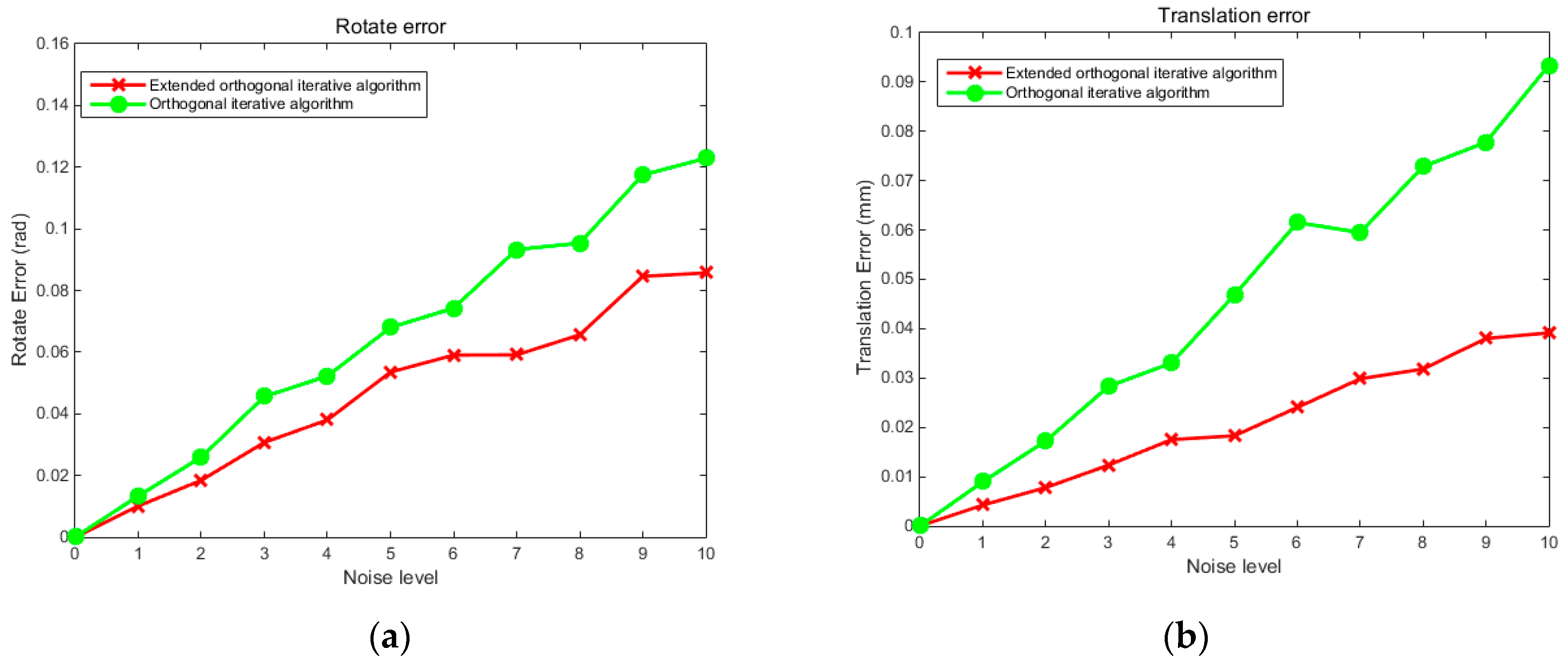
4.1. Simulation Experiment of the Extended Binocular Orthogonal Iterative Algorithm
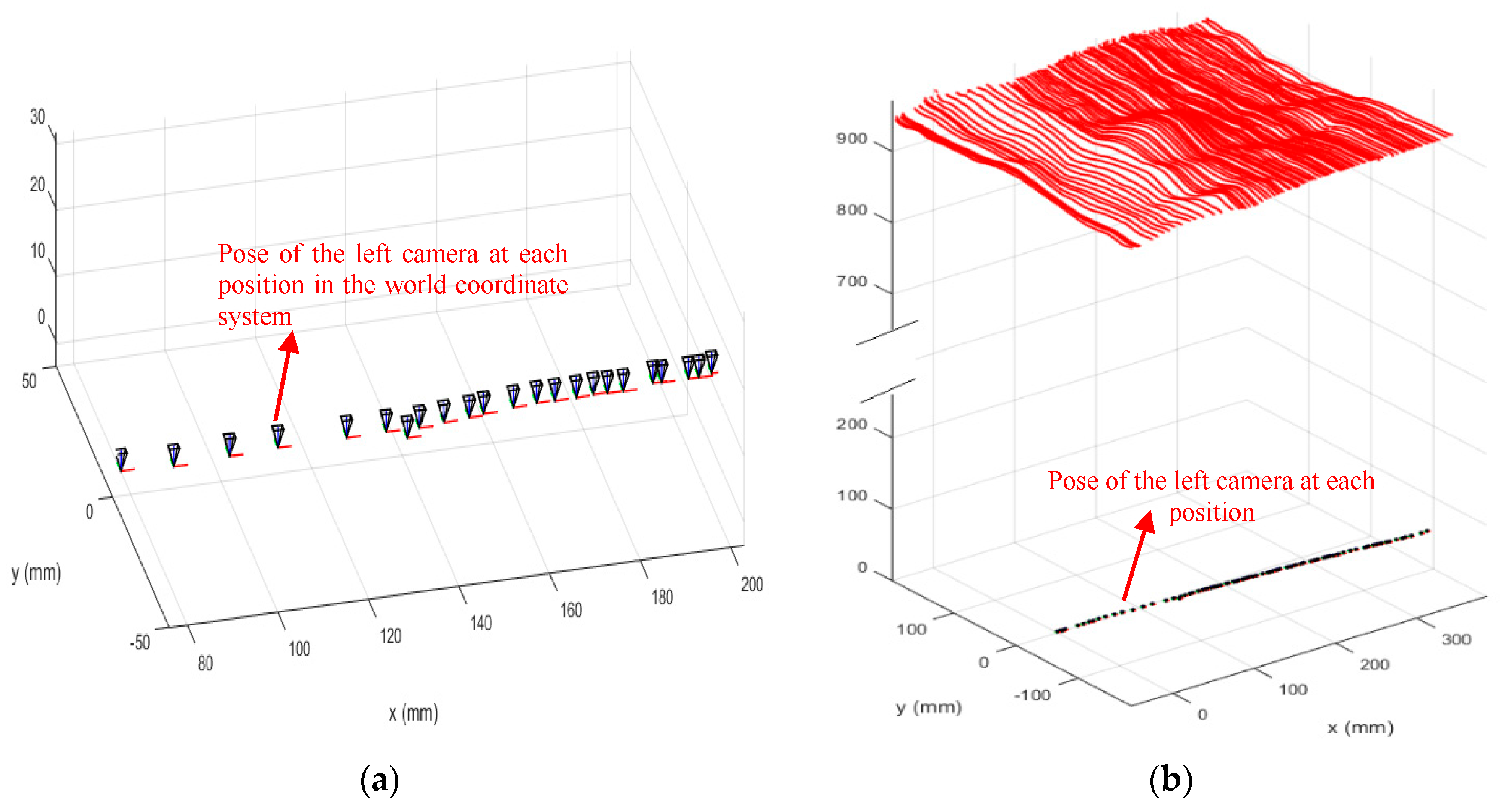
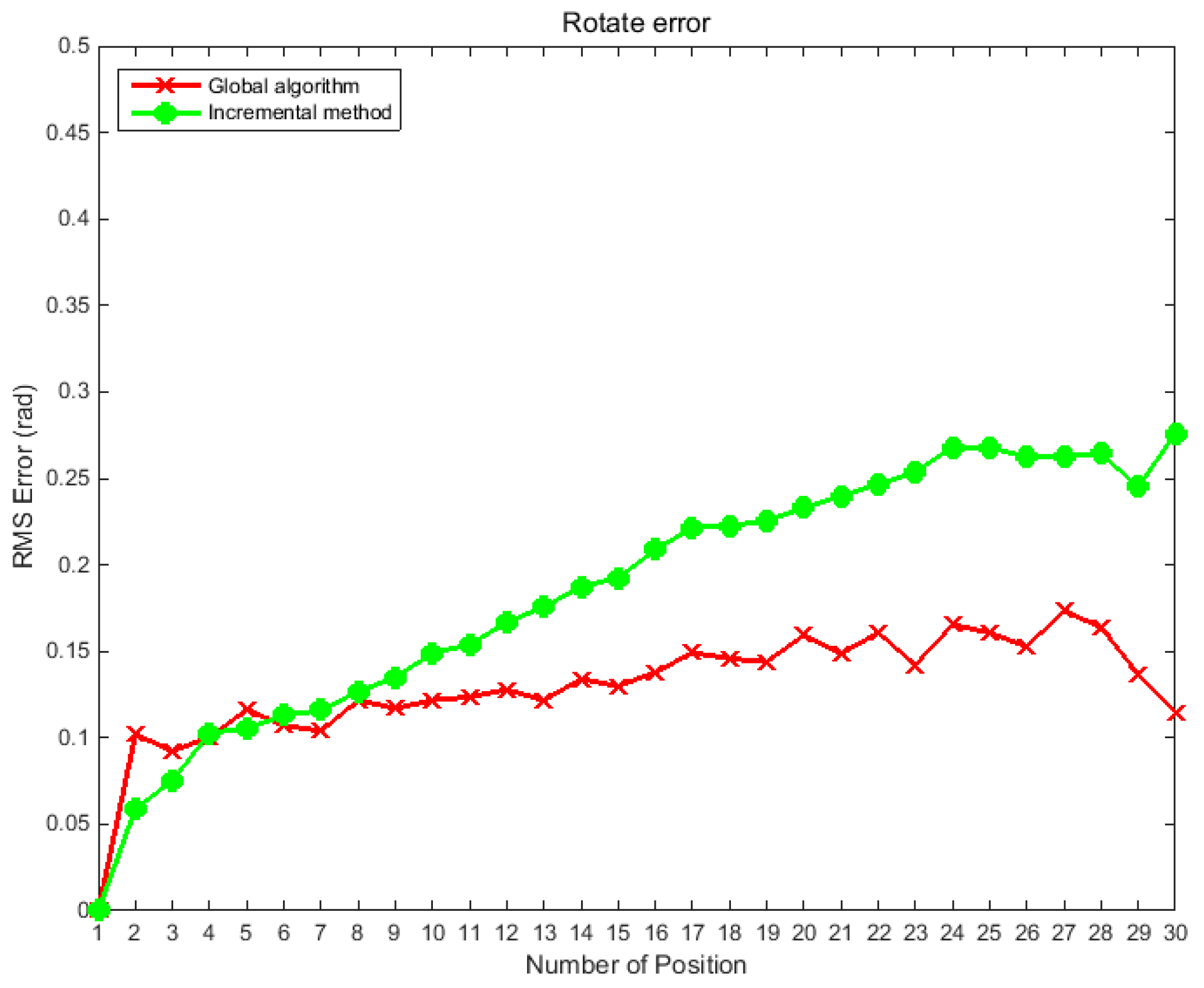
4.2. Simulation Experiment of Global Optimization Algorithm
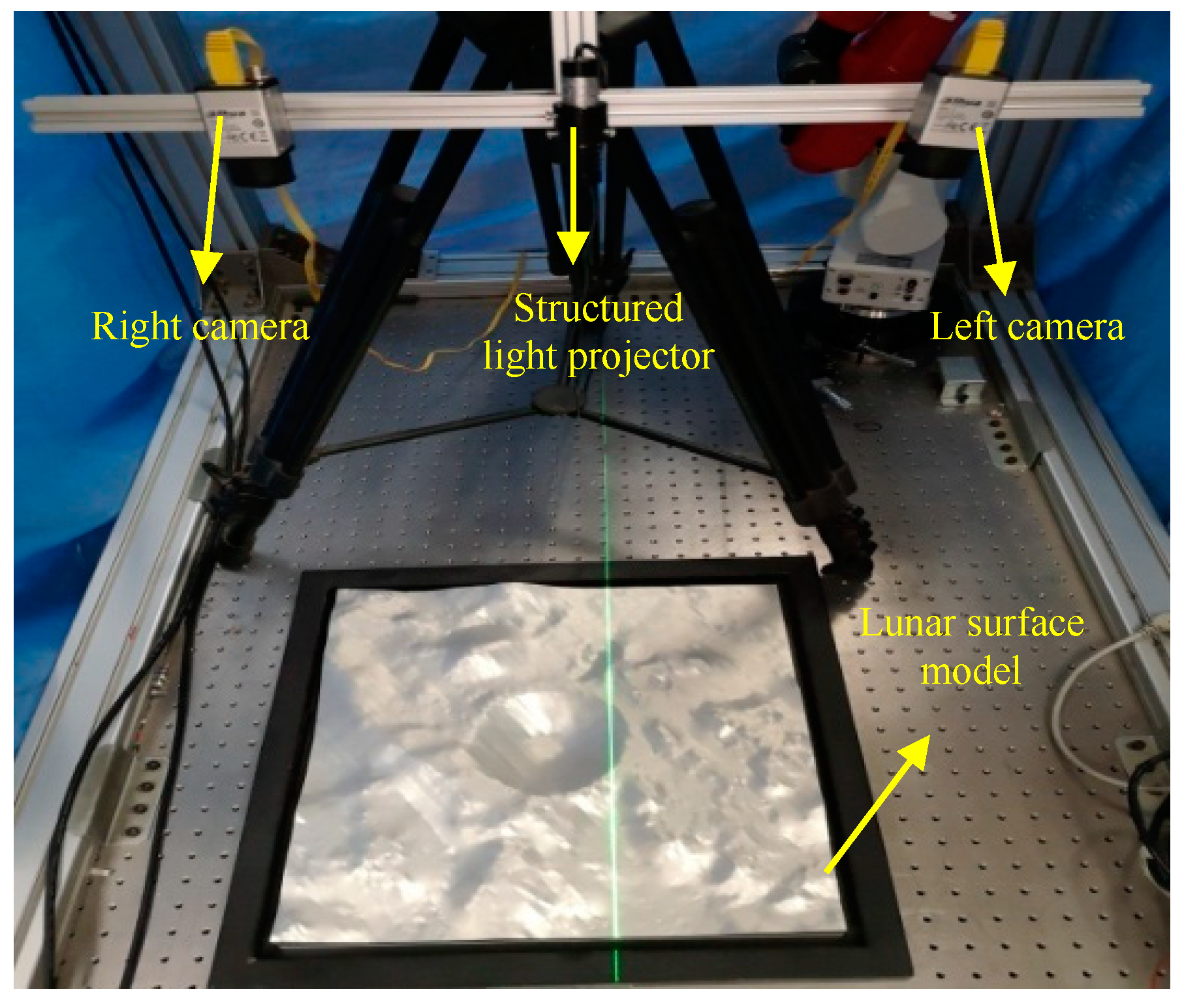
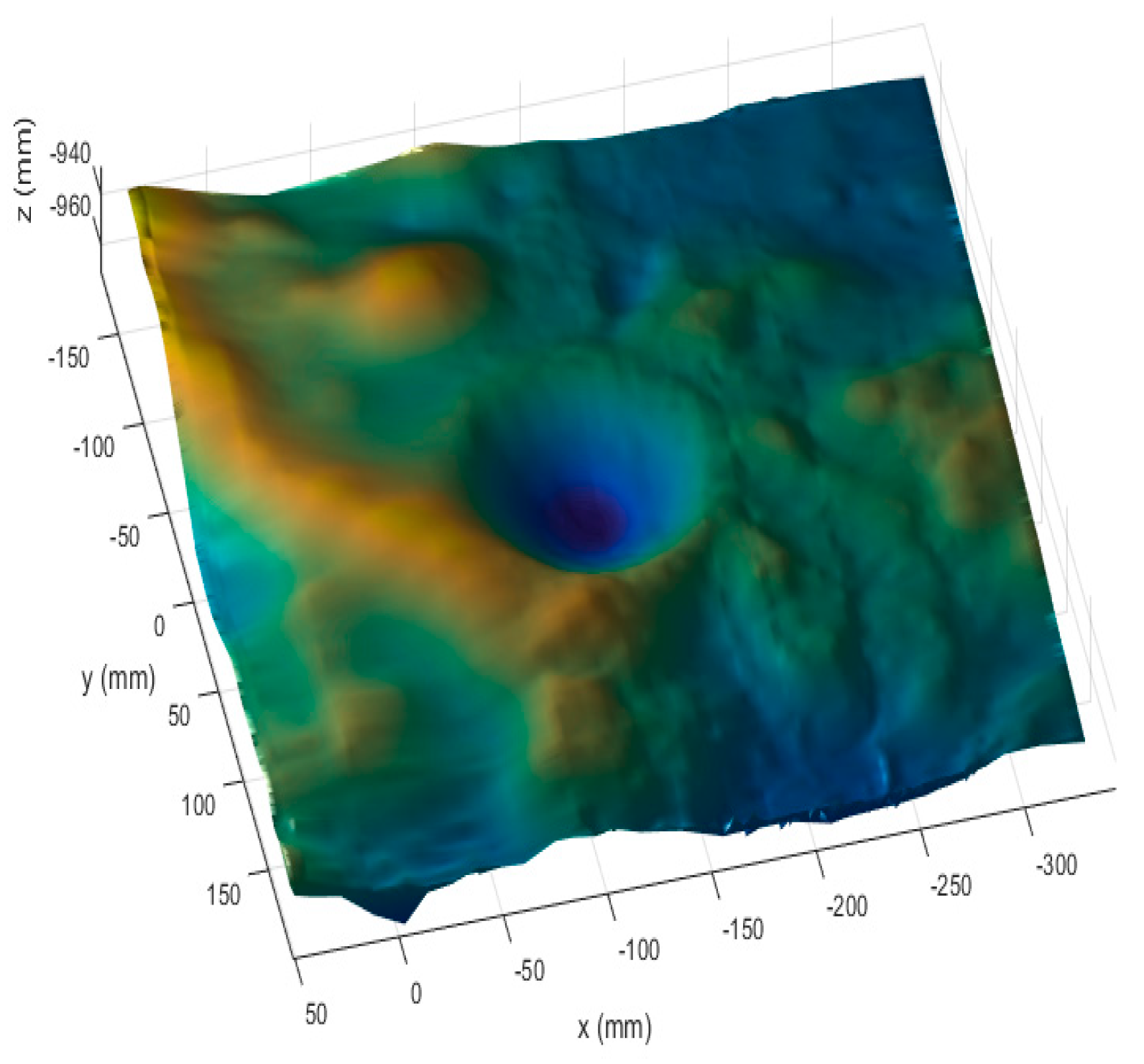
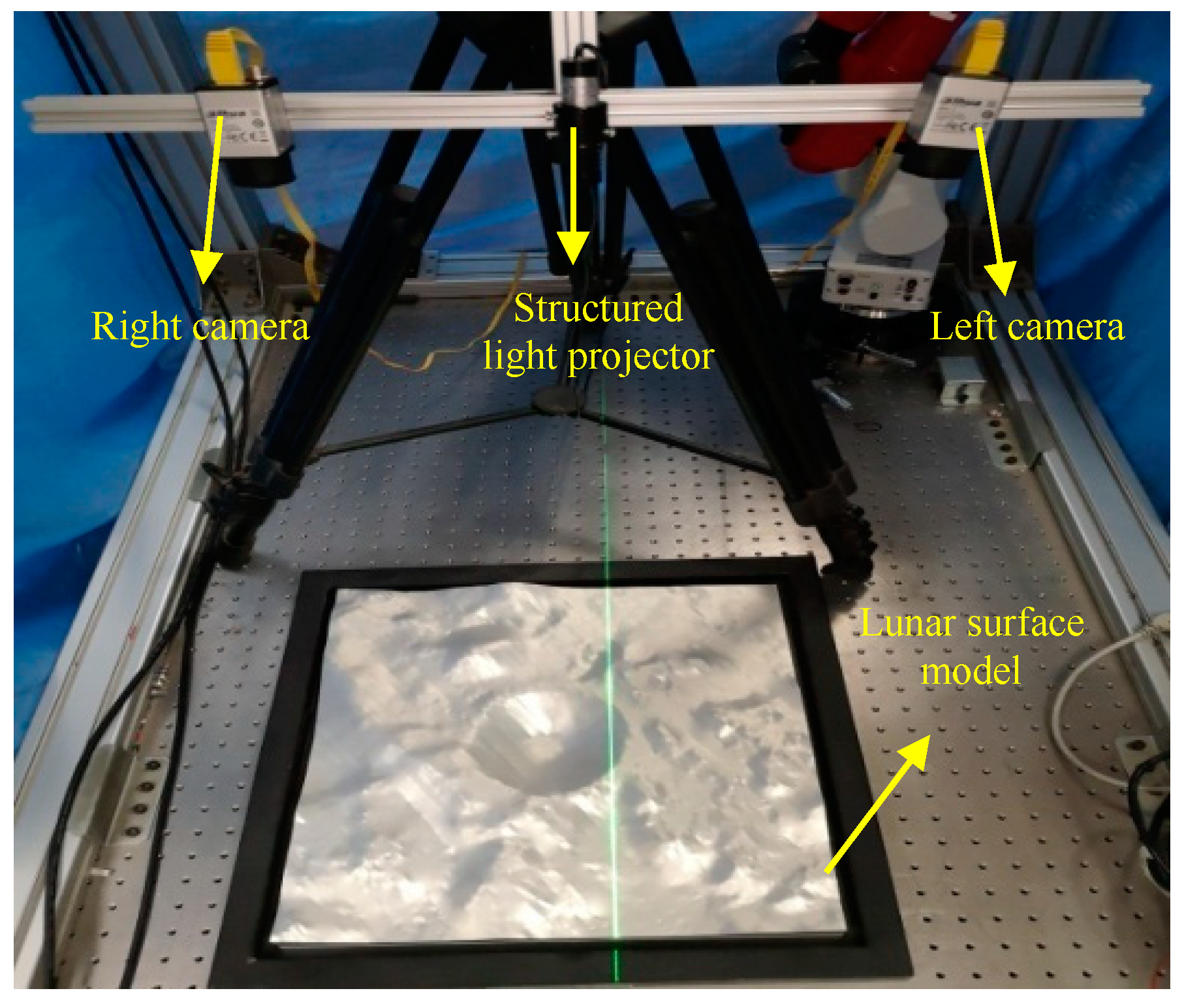
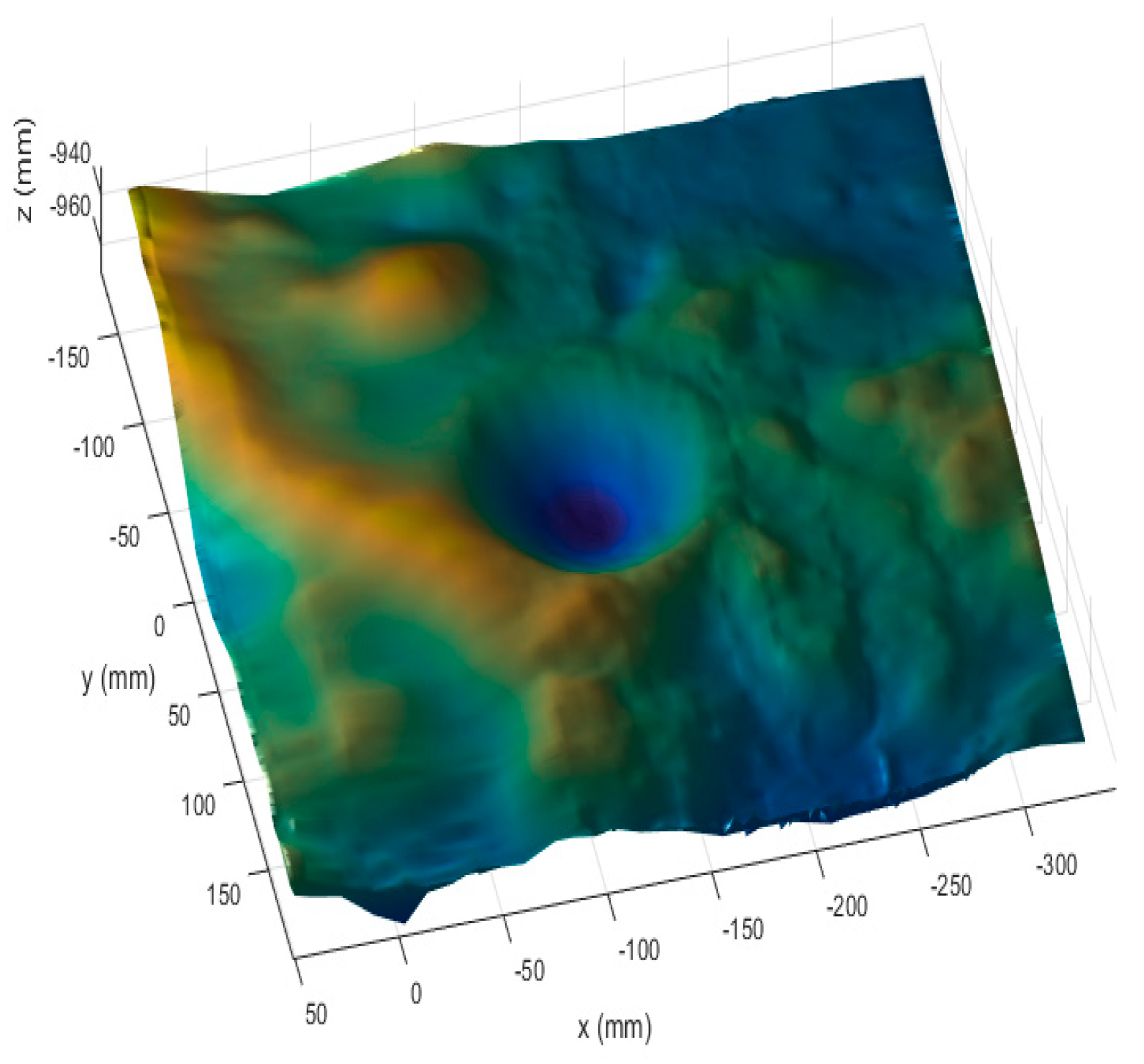
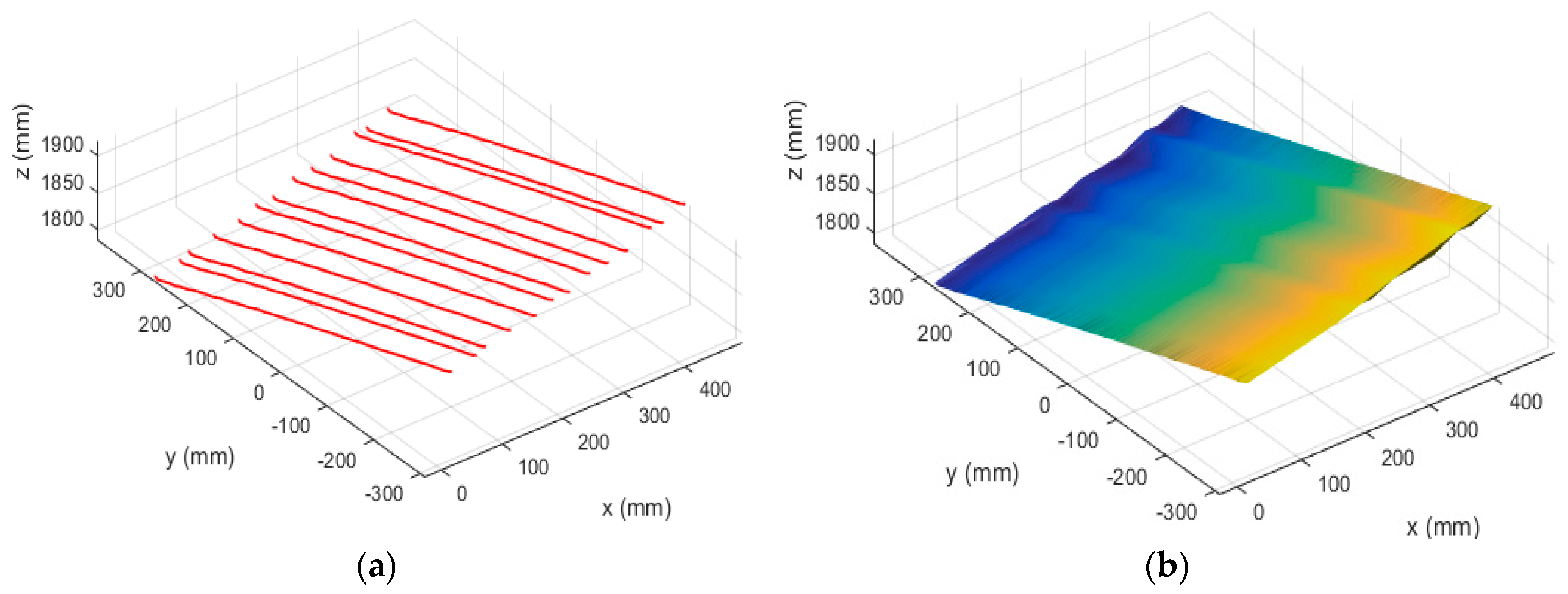
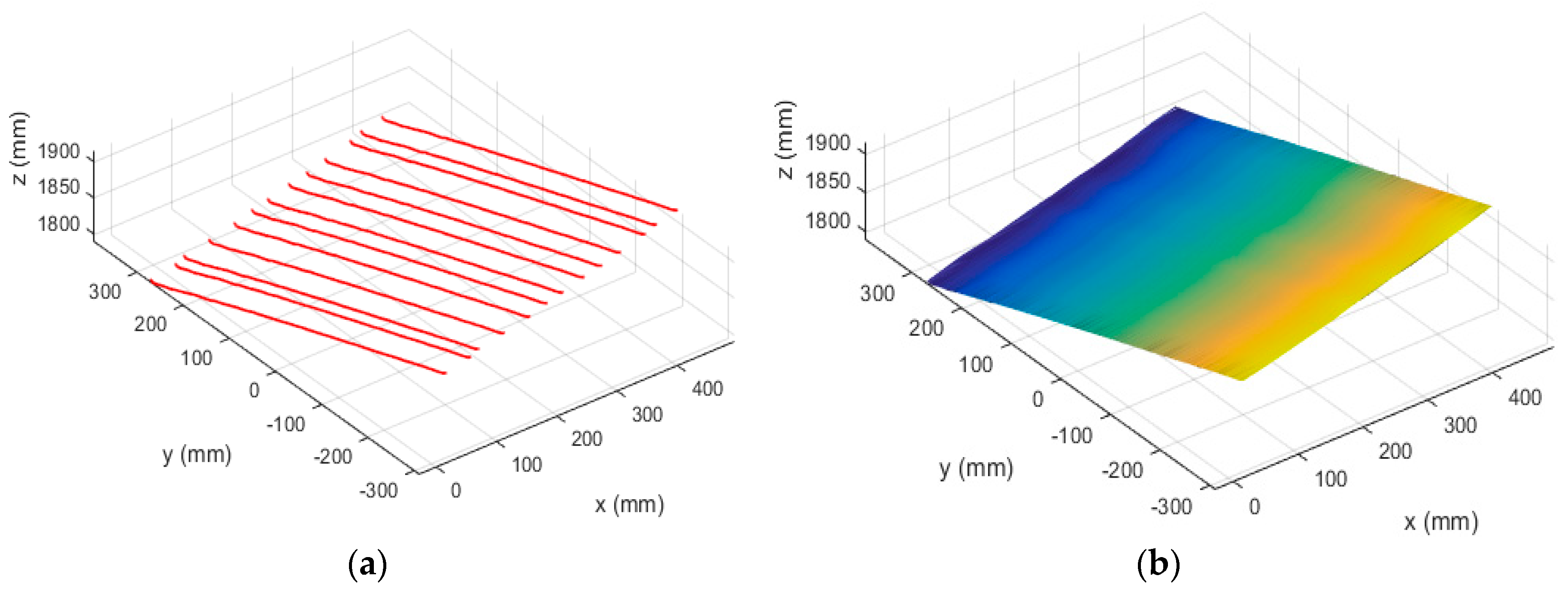
4.3. Free-Form Surface Reconstruction Experiment
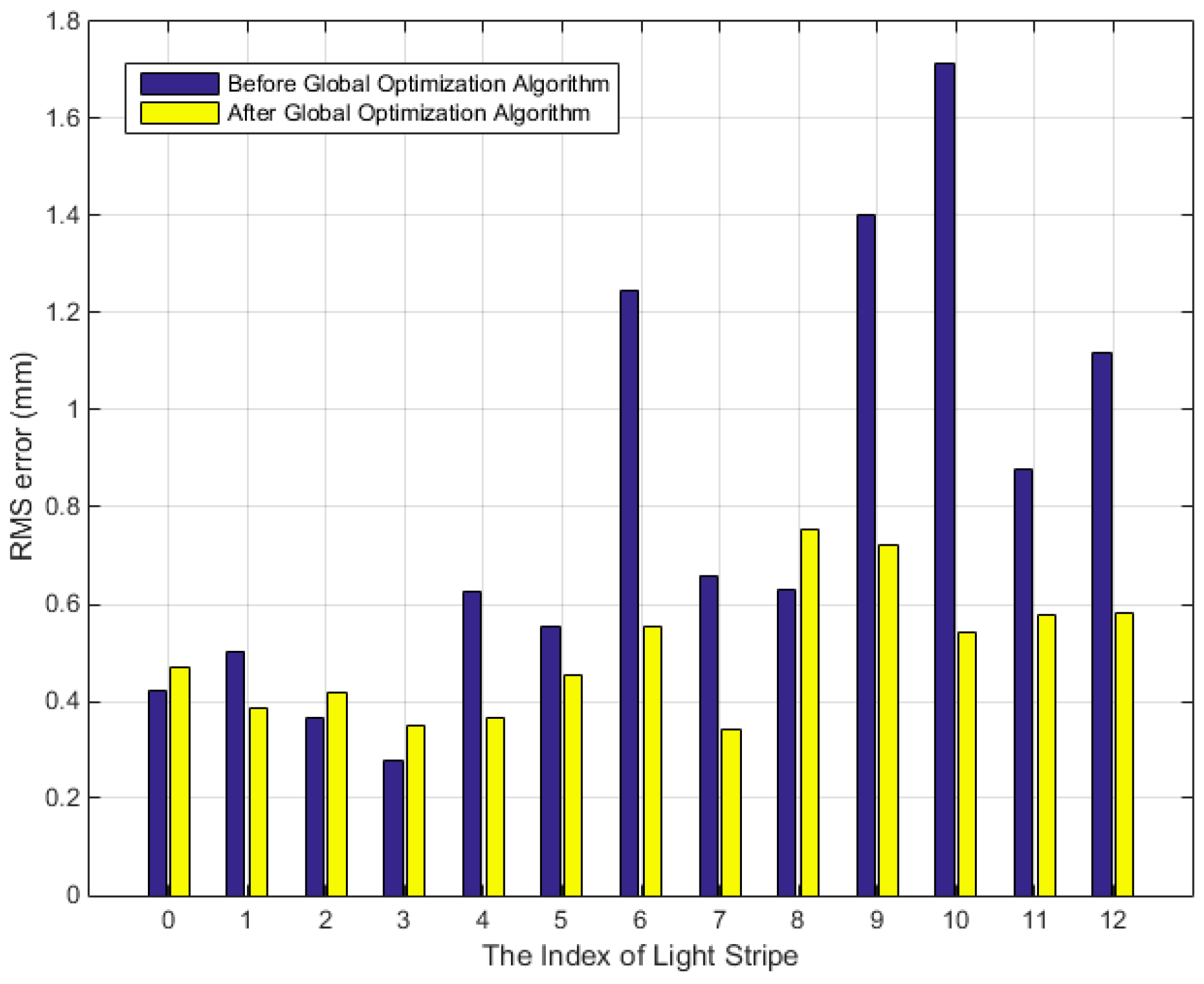
4.4. Evaluation Experiment of Reconstruction Accuracy
4.5. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, X.; Xie, Z.; Wang, K. Research on a Handheld 3D Laser Scanning System for Measuring Large-Sized Objects. Sensors 2018, 18, 3567. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Ren, L.; Deng, H. Measurement of Unmanned Aerial Vehicle Attitude Angles Based on a Single Captured Image. Sensors 2018, 18, 2655. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Cao, Z.; Liu, J. Real-Time Visual Measurement With Opponent Hitting Behavior for Table Tennis Robot. IEEE Trans. Instrum. Meas. 2018, 67, 811–820. [Google Scholar] [CrossRef]
- Wang, F.B.; Tu, P.; Wu, C. Multi-image mosaic with SIFT and vision measurement for microscale structures processed by femtosecond laser. Opt. Lasers Eng. 2018, 100, 124–130. [Google Scholar] [CrossRef]
- Liberadzki, P.; Adamczyk, M.; Witkowski, M. Structured-Light-Based System for Shape Measurement of the Human Body in Motion. Sensors 2018, 18, 2827. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S. High-speed 3D shape measurement with structured light methods: A review. Opt. Lasers Eng. 2018, 106, 119–131. [Google Scholar] [CrossRef]
- Xu, J.; Douet, J.; Zhao, J.; Song, L.; Chen, K. A simple calibration method for structured light-based 3D profile measurement. Opt. Laser Technol. 2013, 48, 187–193. [Google Scholar] [CrossRef]
- VanderJeught, S.; Dirckx, J.J. Real-time structured light profilometry: A review. Opt. Lasers Eng. 2016, 87, 18–31. [Google Scholar] [CrossRef]
- Song, L.; Li, X.; Yang, Y. Structured-light based 3D reconstruction system for cultural relic packaging. Sensors 2018, 18, 2981. [Google Scholar] [CrossRef] [PubMed]
- Lazaros, N.; Sirakoulis, G.C.; Gasteratos, A. Review of stereo vision algorithms: From software to hardware. Int. J. Optomechatronics 2008, 2, 435–462. [Google Scholar] [CrossRef]
- Geiger, A.; Ziegler, J.; Stiller, C. Stereoscan: Dense 3d reconstruction in real-time, Intelligent Vehicles Symposium (IV). In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 963–968. [Google Scholar]
- Dhond, U.R.; Aggarwal, J.K. Structure from stereo-a review. IEEE Trans. Syst. Man Cybern. 1989, 19, 1489–1510. [Google Scholar] [CrossRef]
- Salvi, J.; Fernandez, S.; Pribanic, T. A state of the art in structured light patterns for surface profilometry. Pattern Recognit. 2010, 43, 2666–2680. [Google Scholar] [CrossRef]
- Geng, J. Structured-light 3D surface imaging: A tutorial. Adv. Opt. Photonics 2011, 3, 128–160. [Google Scholar] [CrossRef]
- Wang, C.; Li, Y.; Ma, Z. Distortion Rectifying for Dynamically Measuring Rail Profile Based on Self-Calibration of Multiline Structured Light. IEEE Trans. Instrum. Meas. 2018, 67, 678–689. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.F.; Wang, Q.L. Measurement and defect detection of the weld bead based on online vision inspection. IEEE Trans. Instrum. Meas. 2010, 59, 1841–1849. [Google Scholar]
- Li, Q.; Yao, M.; Yao, X. A real-time 3D scanning system for pavement distortion inspection. Meas. Sci. Technol. 2009, 21, 015702. [Google Scholar] [CrossRef]
- Usamentiaga, R.; Molleda, J.; Garcia, D.F. Removing vibrations in 3D reconstruction using multiple laser stripes. Opt. Lasers Eng. 2014, 53, 51–59. [Google Scholar] [CrossRef]
- Xie, Z.; Wang, X.; Chi, S. Simultaneous calibration of the intrinsic and extrinsic parameters of structured-light sensors. Opt. Lasers Eng. 2014, 58, 9–18. [Google Scholar] [CrossRef]
- Liu, Z.; Li, X.; Yin, Y. On-site calibration of line-structured light vision sensor in complex light environments. Opt. Express 2015, 23, 29896–29911. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Z.; Mu, G. Color-coded projection grating method for shape measurement with a single exposure. Appl. Opt. 2000, 39, 3504–3508. [Google Scholar] [CrossRef]
- Zhang, Z.; Towers, C.E.; Towers, D.P. Time efficient color fringe projection system for 3D shape and color using optimum 3-frequency selection. Opt. Express 2006, 14, 6444–6455. [Google Scholar] [CrossRef]
- Ishii, I.; Yamamoto, K.; Doi, K. High-speed 3D image acquisition using coded structured light projection. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007. [Google Scholar]
- Sato, K.; Inokuchi, S. Three-dimensional surface measurement by space encoding range imaging. J. Robot. Syst. 1985, 2, 27–39. [Google Scholar]
- Yang, R.; Cheng, S.; Yang, W. Robust and accurate surface measurement using structured light. IEEE Trans. Instrum. Meas 2008, 57, 1275–1280. [Google Scholar] [CrossRef]
- Lu, C.P.; Hager, G.D.; Mjolsness, E. Fast and globally convergent pose estimation from video images. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 610–622. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 IEEE international conference on computer vision, Vancouver, BC, Canada, 7 July 2011; pp. 2564–2571. [Google Scholar]
- Fischler, M.A.; Bolle, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Steger, C. An unbiased detector of curvilinear structures. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 113–125. [Google Scholar] [CrossRef]
- Steger, C. Unbiased extraction of lines with parabolic and Gaussian profiles. Comput. Vis. Image Underst. 2013, 117, 97–112. [Google Scholar] [CrossRef]
- Fusiello, A.; Trucco, E.; Verri, A. A compact algorithm for rectification of stereo pairs. Mach. Vis. Appl. 2000, 12, 16–22. [Google Scholar] [CrossRef]
- Camera Calibration Toolbox for MATLAB. Available online: http://robots.stanford.edu/cs223b04/JeanYvesCalib/index.html#links (accessed on 5 June 2018).
- Martinec, D.; Pajdla, T. Robust rotation and translation estimation in multi-view reconstruction. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007. [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Jiang, N.; Cui, Z.; Tan, P. A global linear method for camera pose registration. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 481–488. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pre-Calibrated Parameters | Unknown Parameters | ||
|---|---|---|---|
| Item | Parameters | Item | Parameters |
| Extrinsic parameters of the Binocular camera | Rotation matrix | The pose of the camera in the world coordinate system. | Rotation matrix |
| Translation vector | Translation vector | ||
| Intrinsic parameters of the left camera | Focal length | The coordinates of the light stripes in the camera coordinate system | X-axis coordinates |
| Principal point coordinate | Y-axis coordinates | ||
| Distortion coefficient | Z-axis coordinates | ||
| Intrinsic parameters of the left camera | Focal length | The coordinates of the light stripes in the word coordinate system | X-axis coordinates |
| Principal point coordinate | Y-axis coordinates | ||
| Distortion coefficient | Z-axis coordinates | ||
| Camera | fu/Pixels | fv/Pixels | u0/Pixels | v0/Pixels | kc |
|---|---|---|---|---|---|
| Left | 2564.60 | 2464.09 | 635.77 | 509.03 | [−0.17, 0.18, 0.003, 0.0004, 0.00] |
| Right | 2571.32 | 2570.61 | 625.87 | 503.24 | [−0.13, 0.16, 0.001, 0.0003, 0.00] |
| om | [−0.01615, 0.15960, 0.01905] | ||||
| T0/mm | [−215.2829, −2.1204, 16.5770] | ||||
| Error Type | Maximum Error | Average Error | RMS Error | |
|---|---|---|---|---|
| Before optimization | 2.32 mm | 0.67 mm | 0.9052 mm | |
| After optimization | 1.51 mm | 0.43 mm | 0.4177 mm | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, L.; Wang, X.; Ni, Y. Flexible Three-Dimensional Reconstruction via Structured-Light-Based Visual Positioning and Global Optimization. Sensors 2019, 19, 1583. https://doi.org/10.3390/s19071583
Yin L, Wang X, Ni Y. Flexible Three-Dimensional Reconstruction via Structured-Light-Based Visual Positioning and Global Optimization. Sensors. 2019; 19(7):1583. https://doi.org/10.3390/s19071583
Chicago/Turabian StyleYin, Lei, Xiangjun Wang, and Yubo Ni. 2019. "Flexible Three-Dimensional Reconstruction via Structured-Light-Based Visual Positioning and Global Optimization" Sensors 19, no. 7: 1583. https://doi.org/10.3390/s19071583
APA StyleYin, L., Wang, X., & Ni, Y. (2019). Flexible Three-Dimensional Reconstruction via Structured-Light-Based Visual Positioning and Global Optimization. Sensors, 19(7), 1583. https://doi.org/10.3390/s19071583