Portable System for Monitoring and Controlling Driver Behavior and the Use of a Mobile Phone While Driving

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Experiment Details and Methods
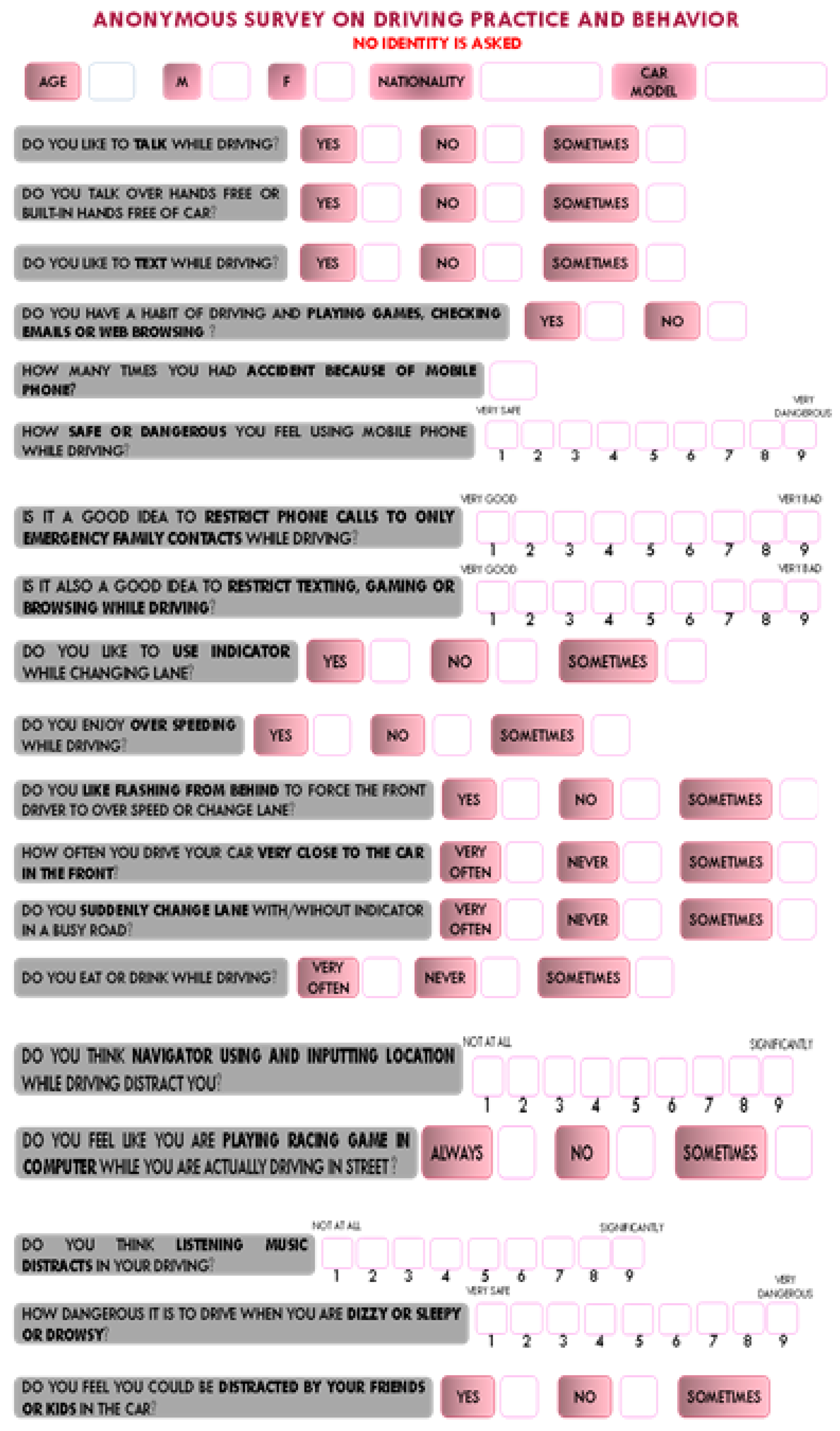
2.1. Pilot Study
2.2. Design of Experiments
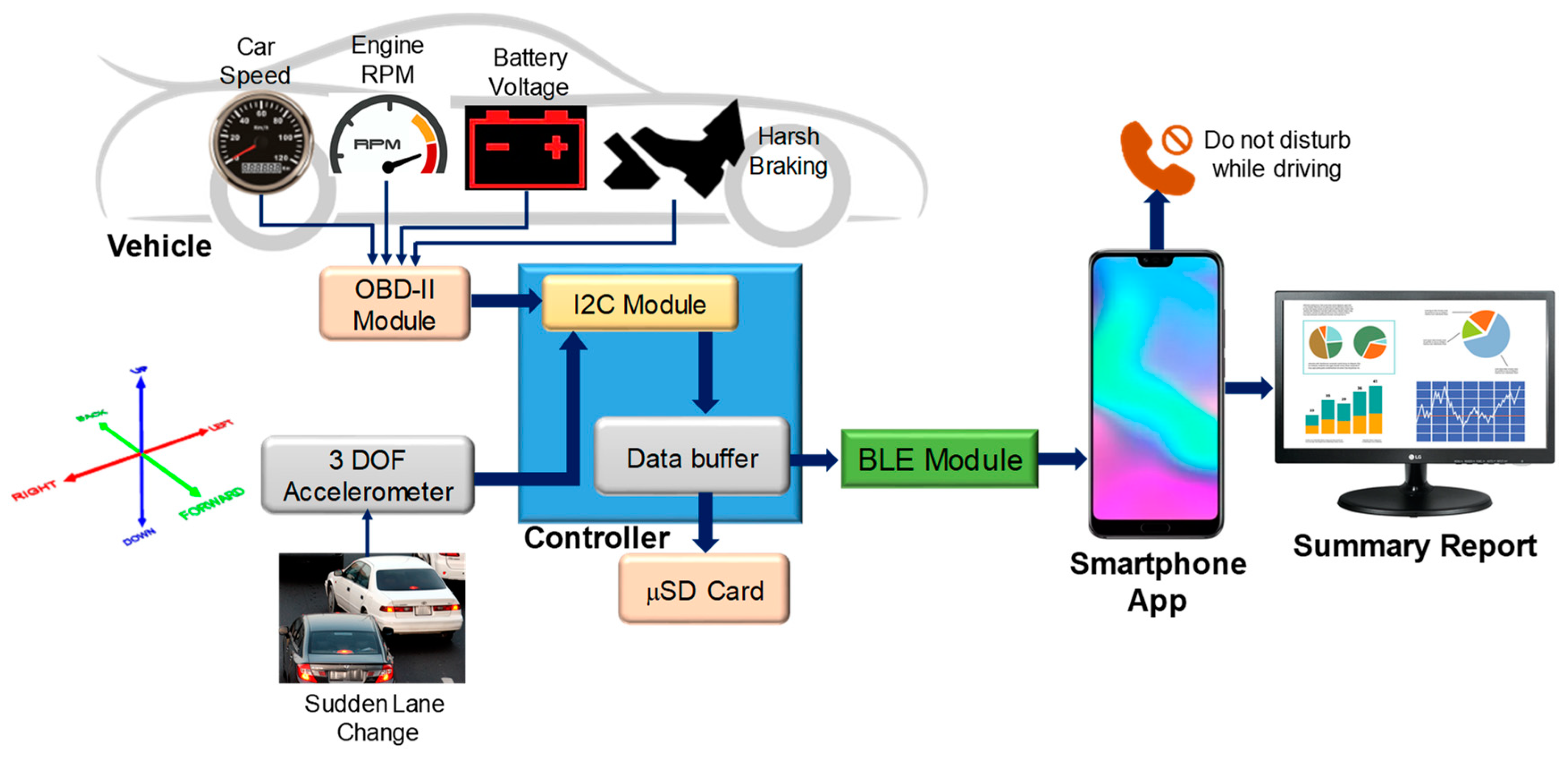
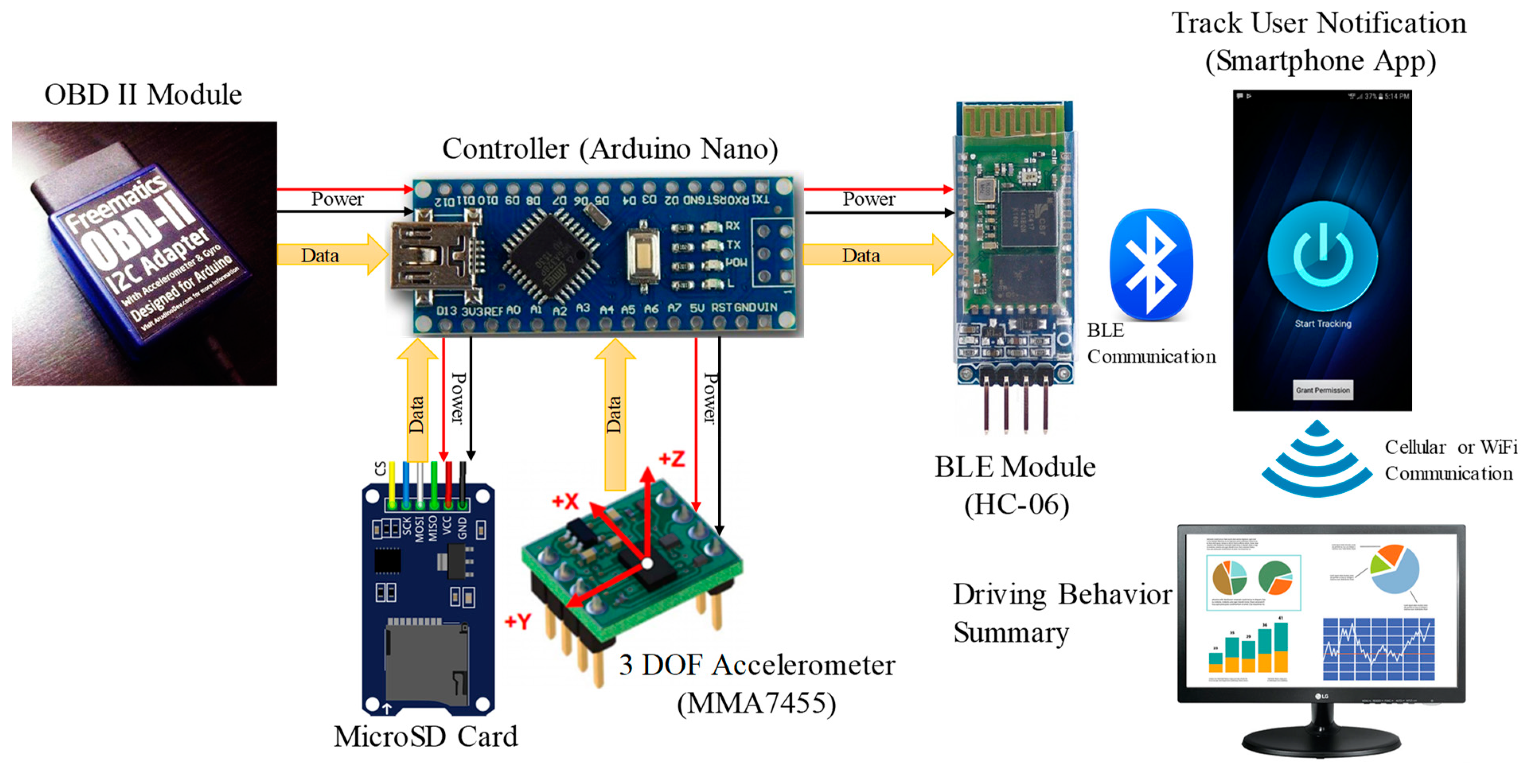
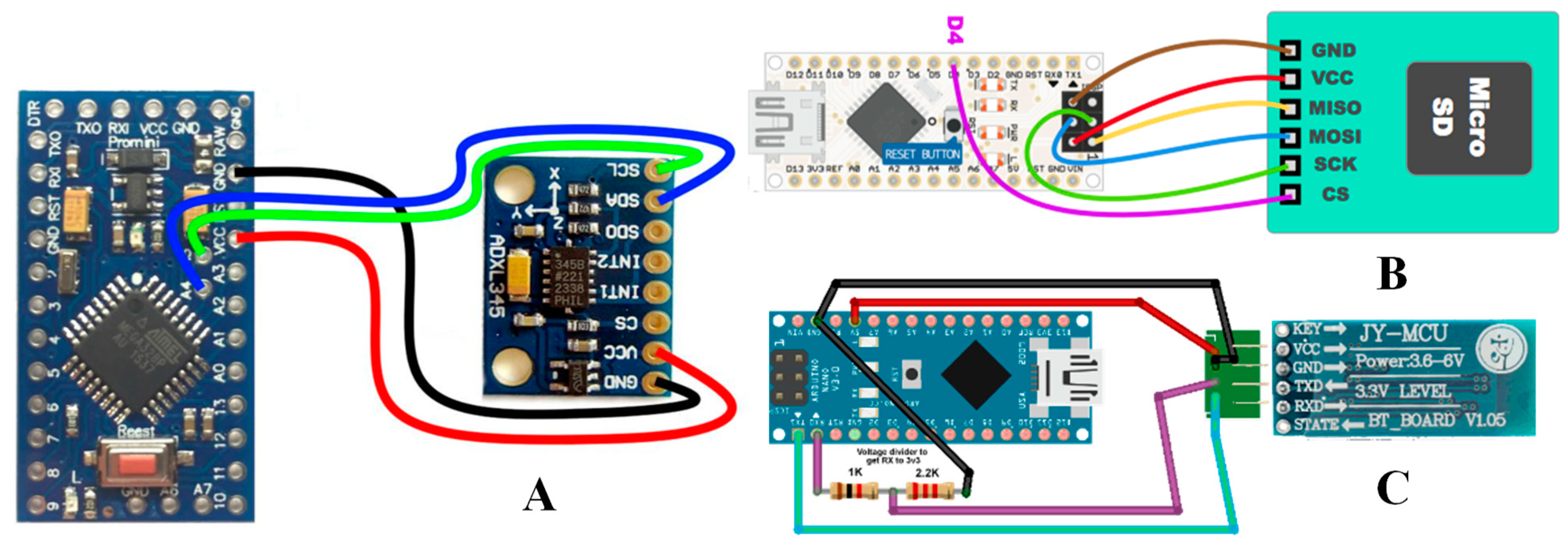
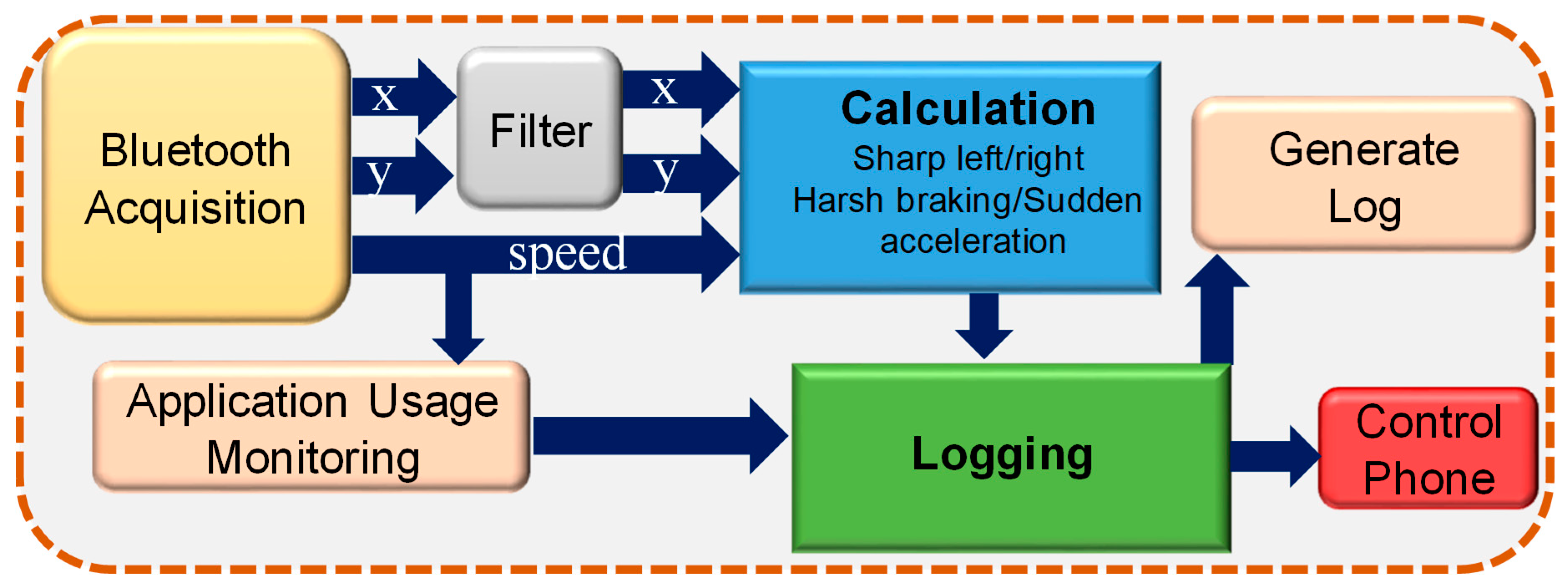
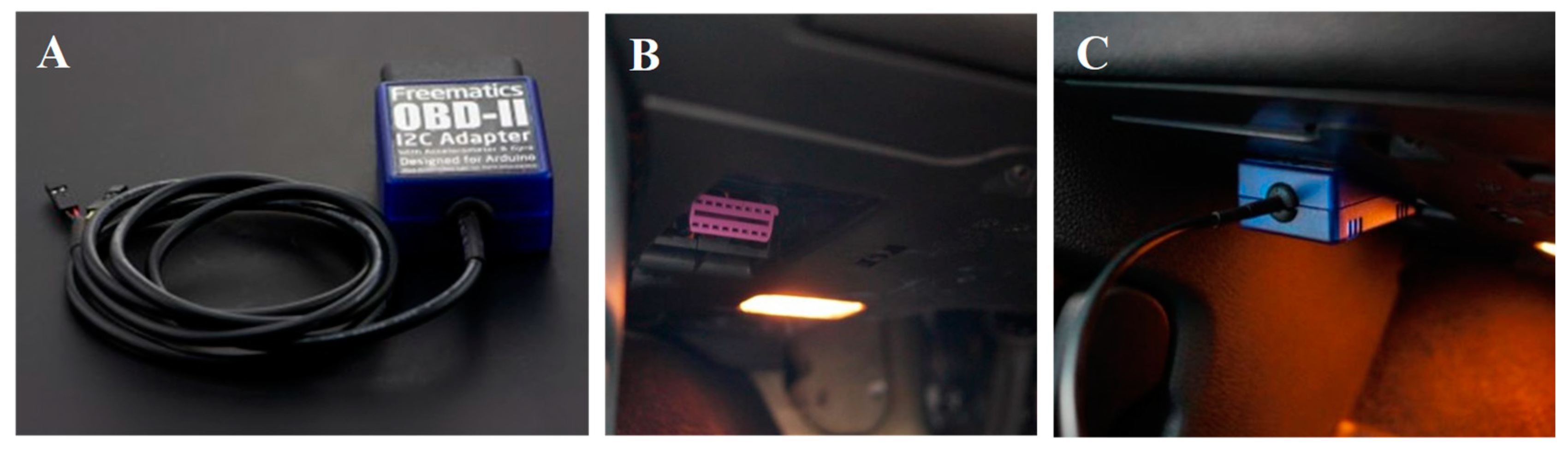
2.2.1. Hardware Modules
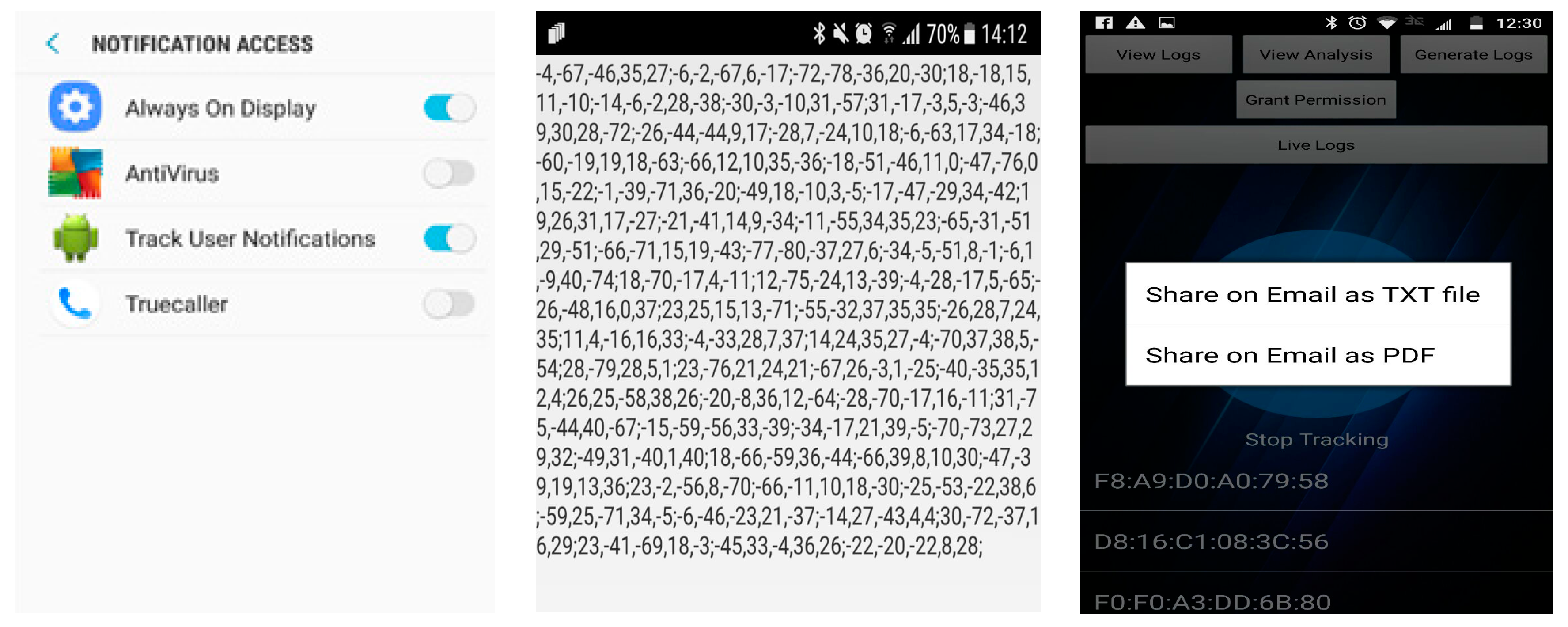
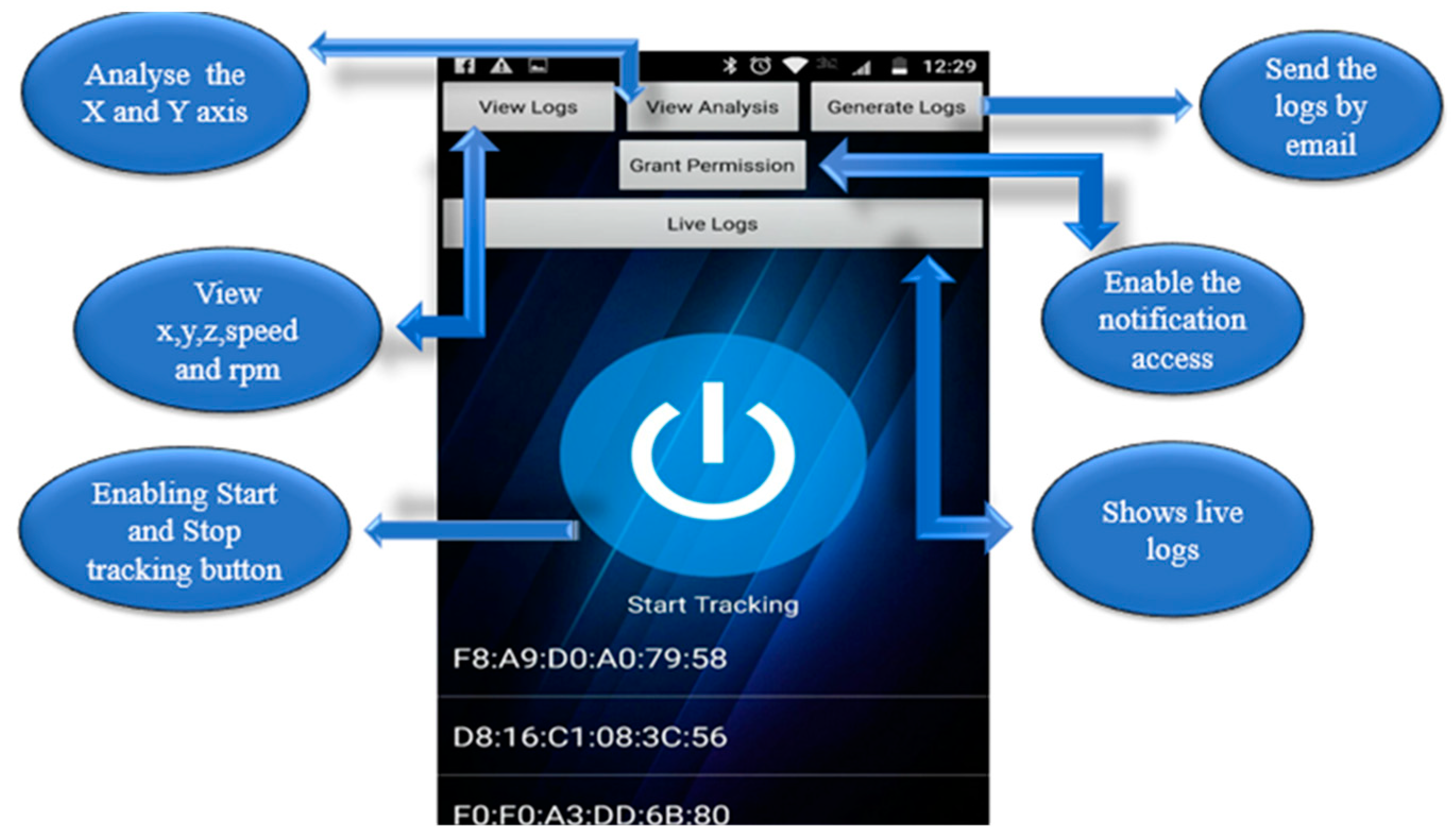
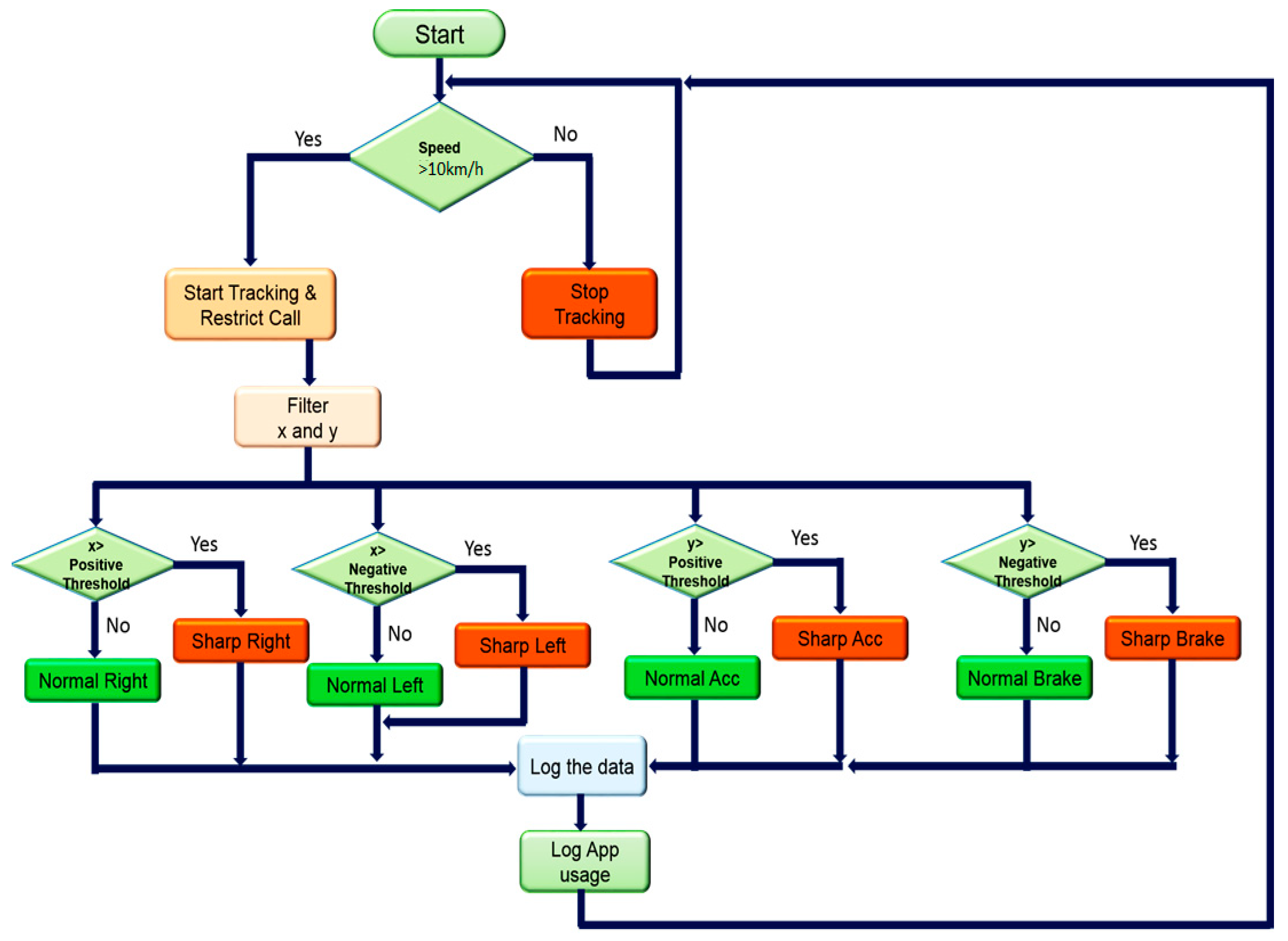
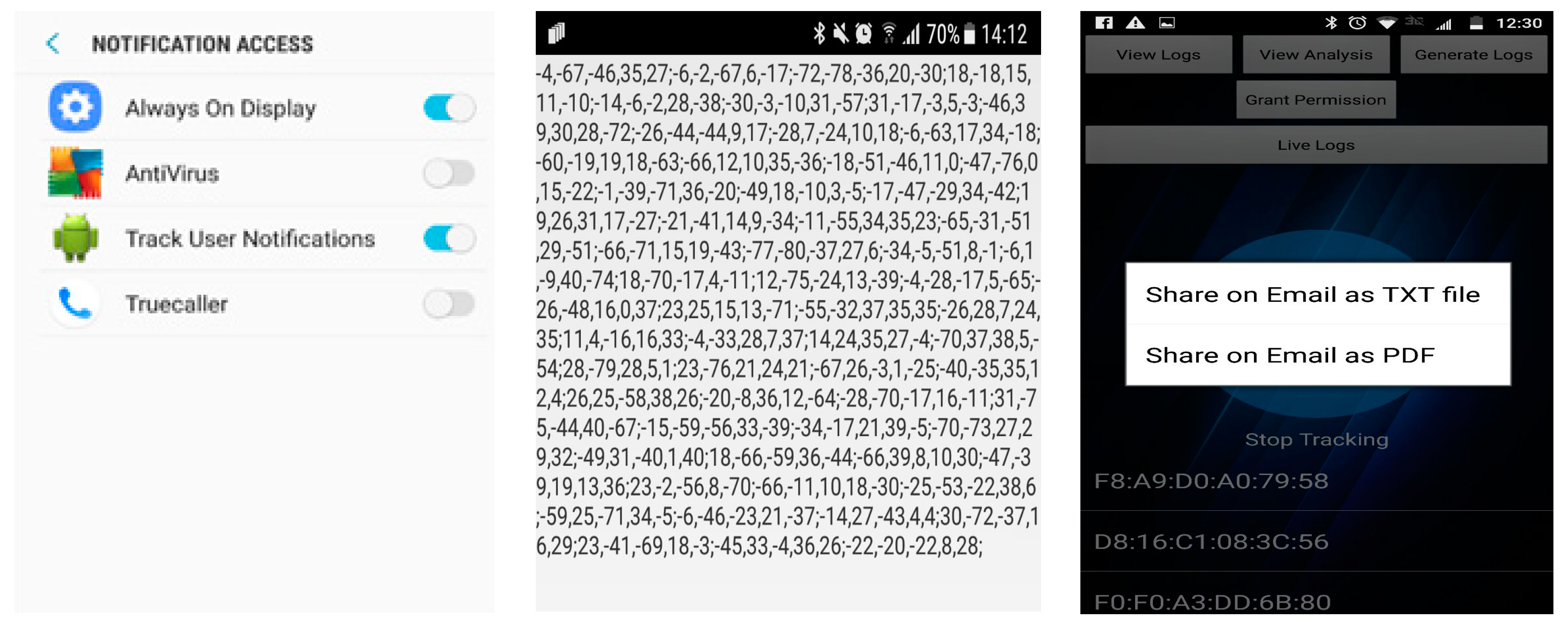
2.2.2. Android Mobile Application: Track User Notification
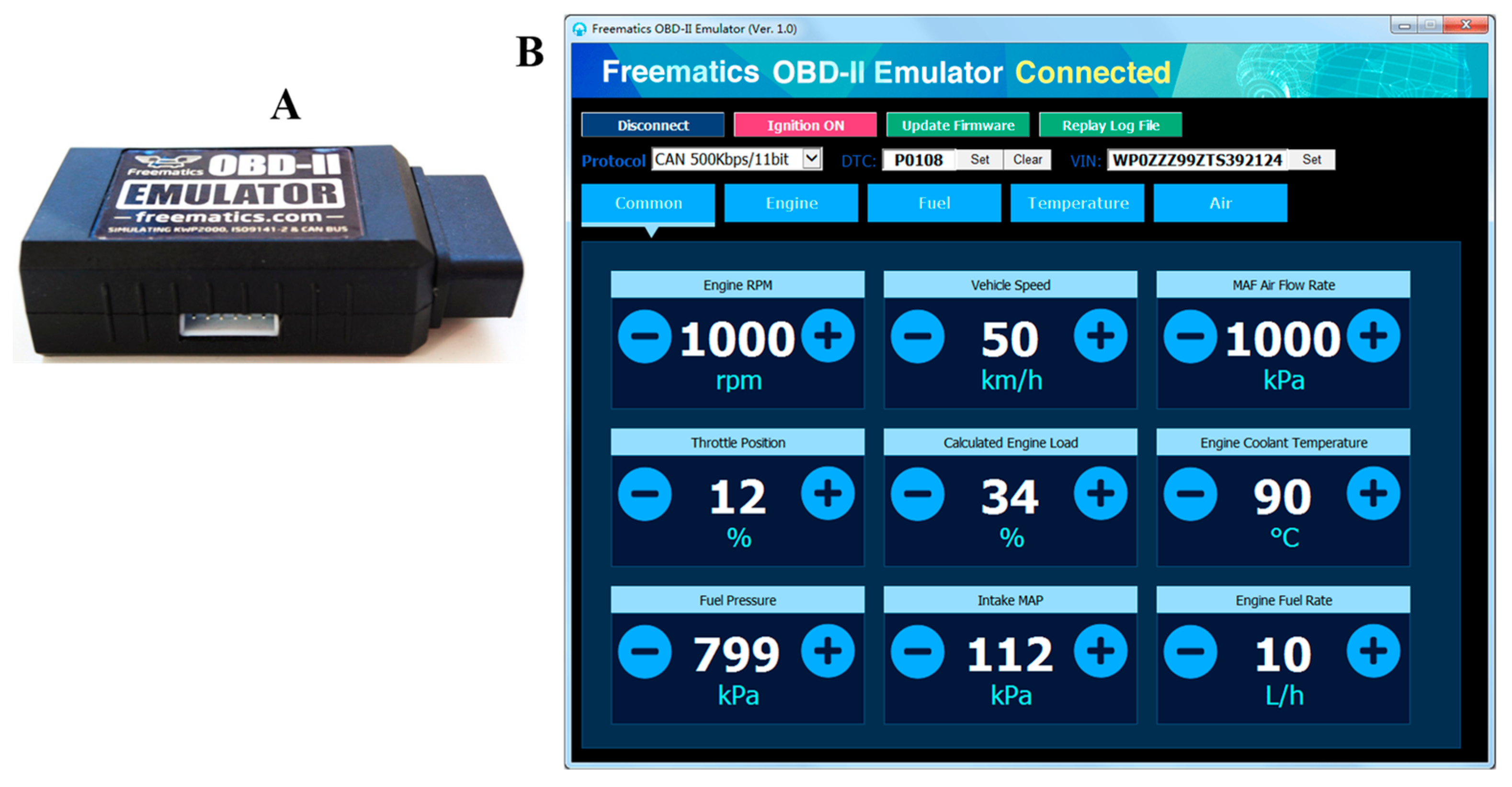
2.2.3. Study 1: Hardware Module Evaluation using Emulator
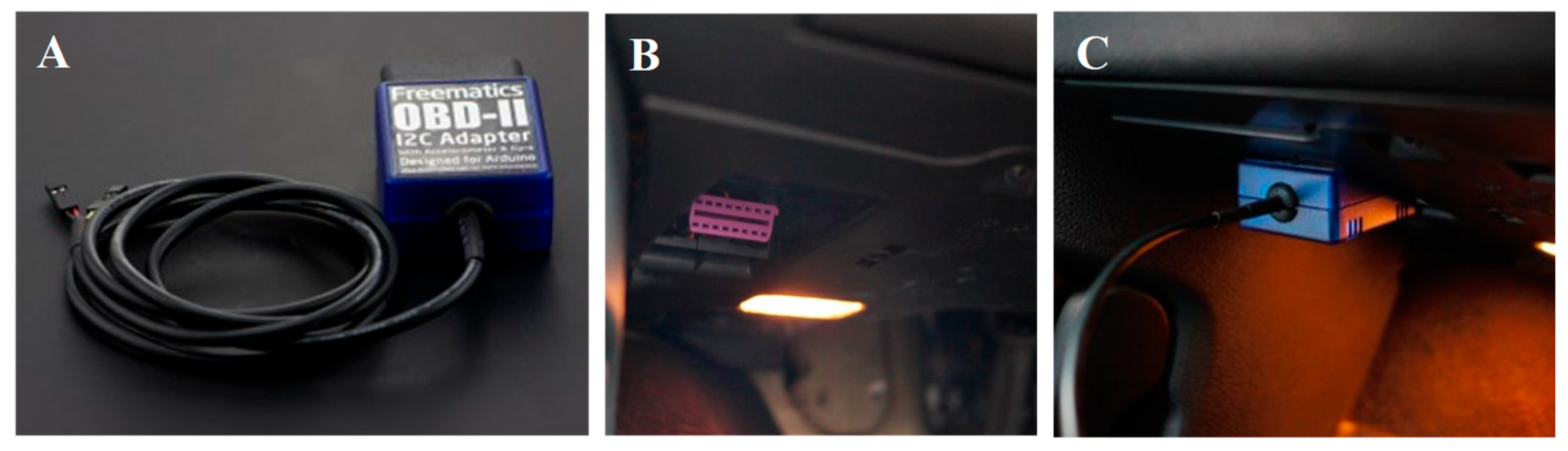
2.2.4. Study 2: Hardware Module Evaluation in Vehicle Environment
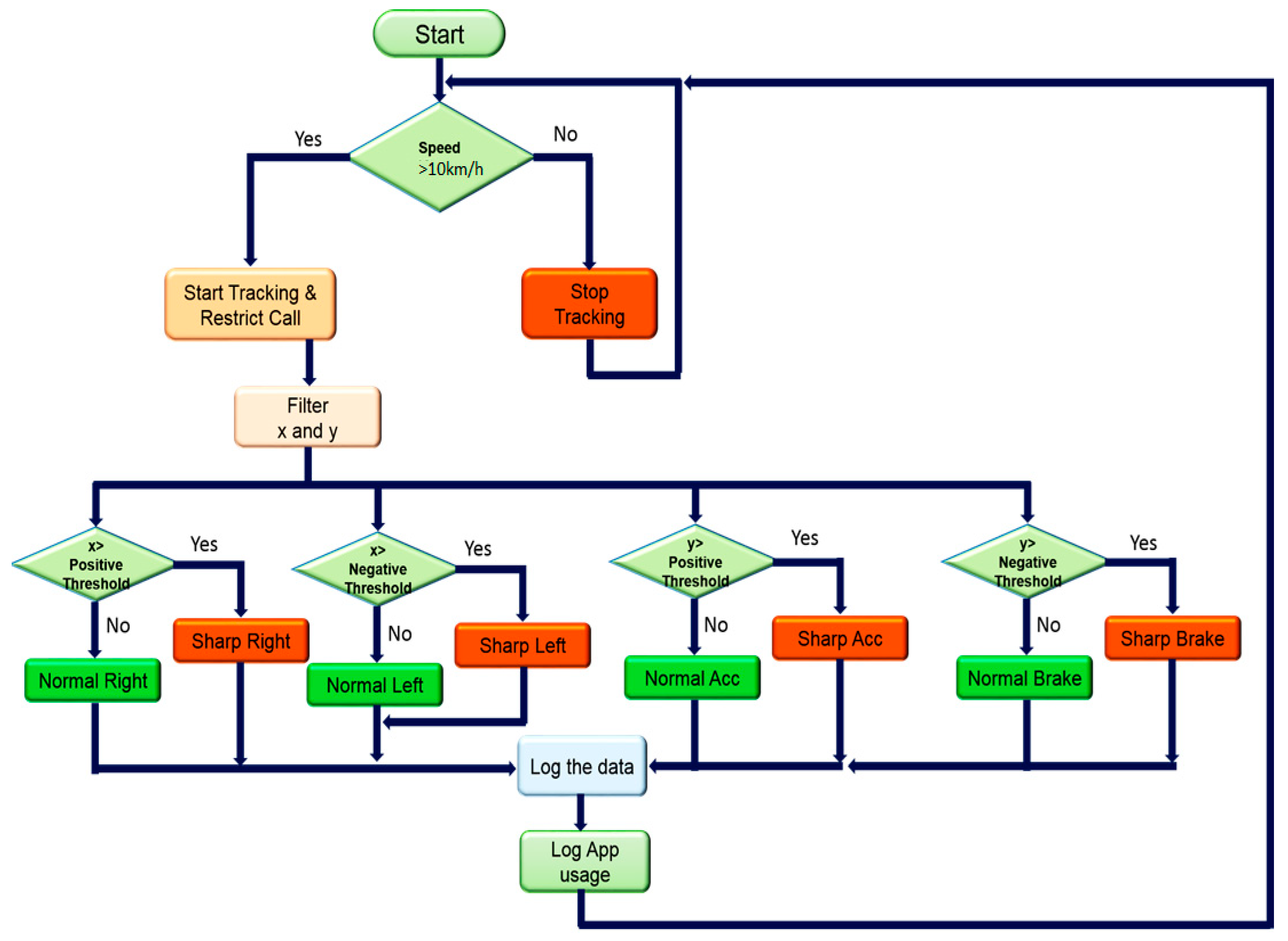
2.2.5. Study 3: Evaluation of Driving Behavior
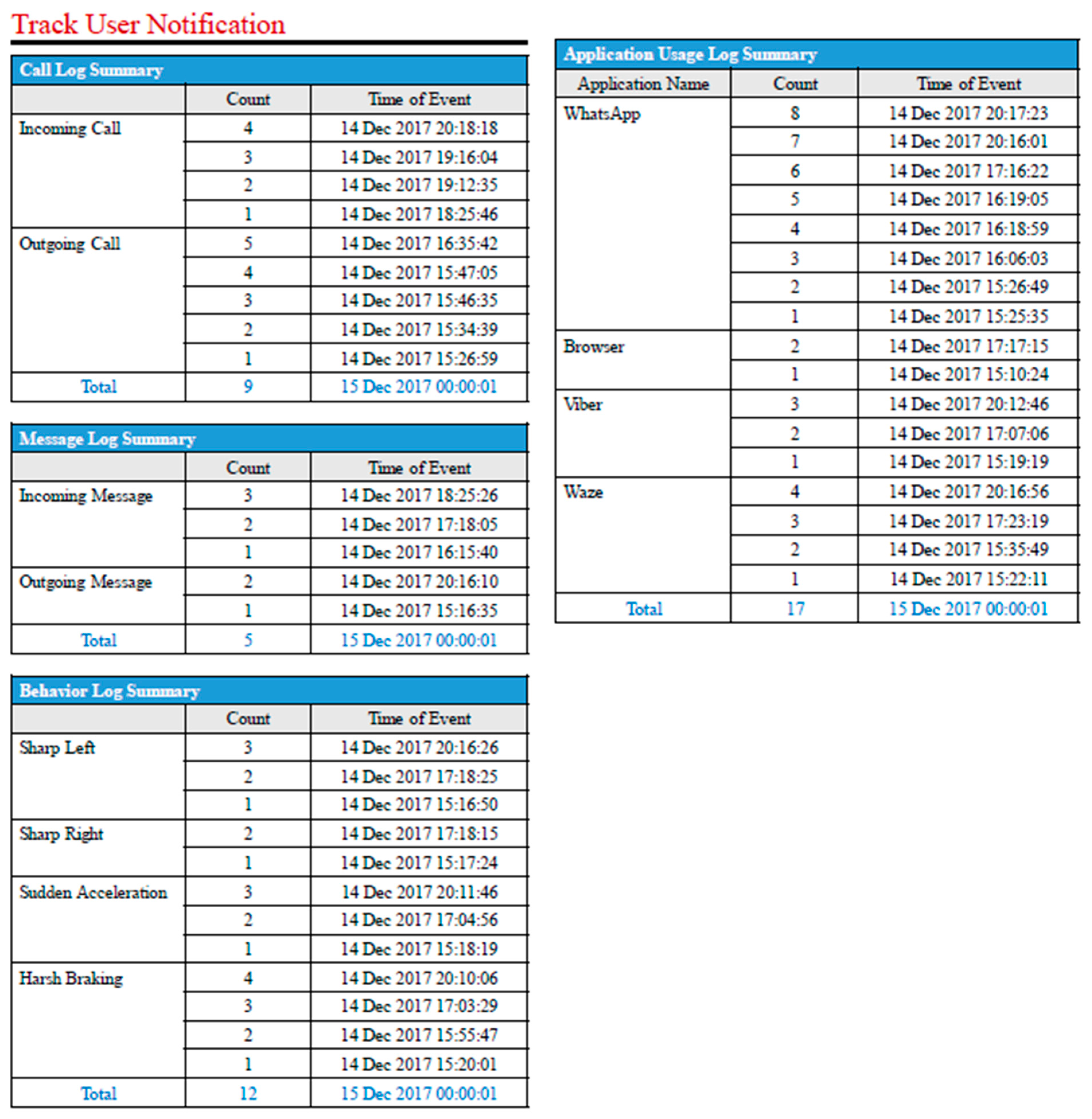
2.2.6. Study 4: Evaluation of the Phone Control, Data Logging, and Reporting
3. Analysis
4. Results and Discussion
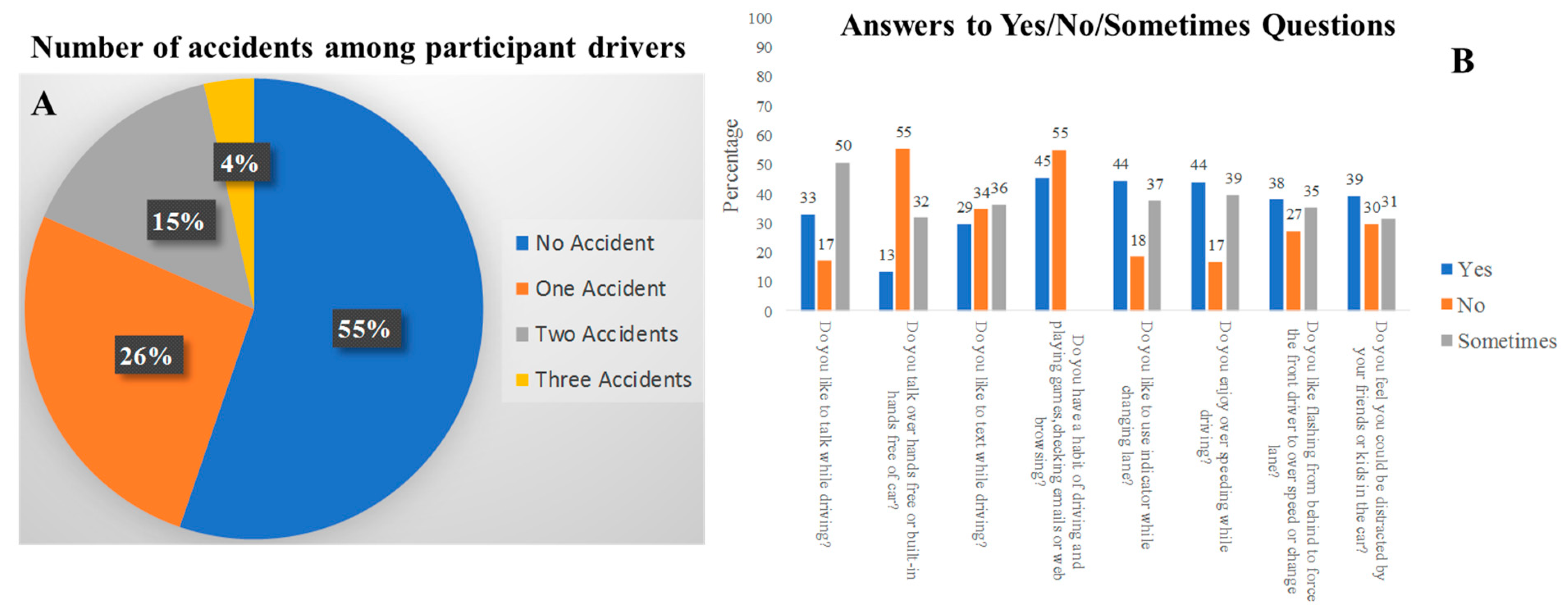
4.1. Summary of Pilot Study
4.2. Performance Evaluation of the Prototype
4.2.1. Studies 1 and 2
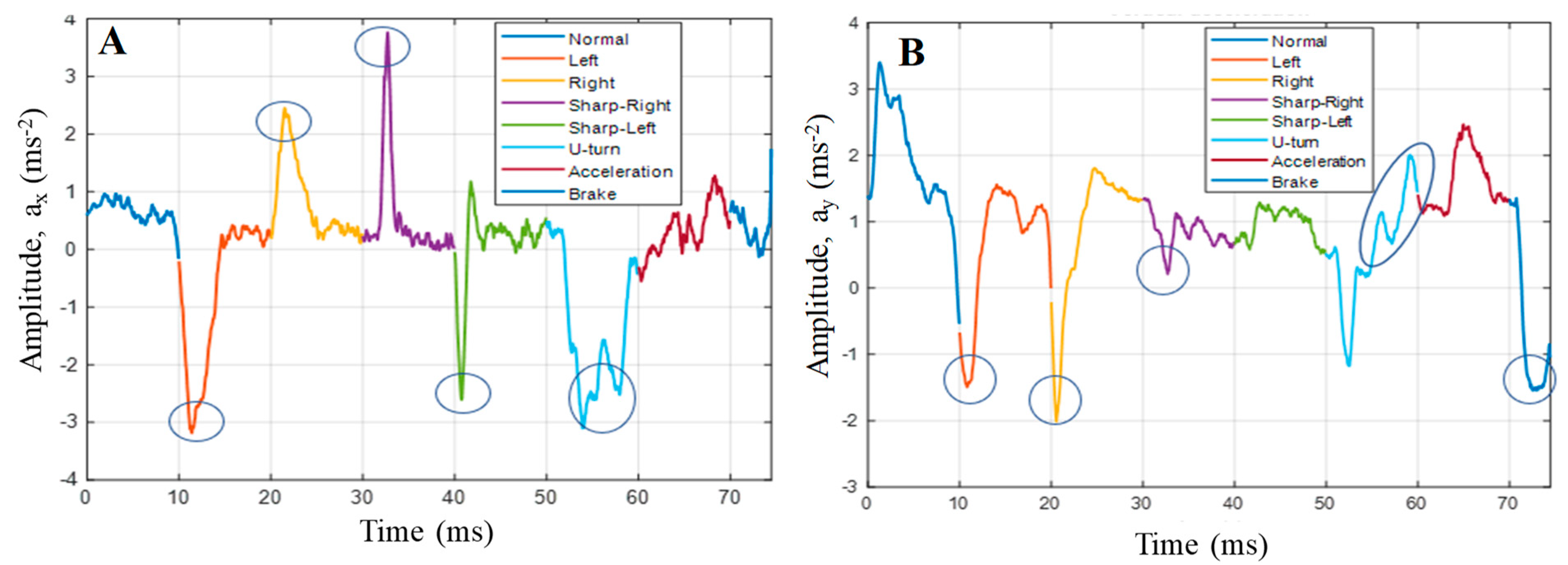
4.2.2. Study 3: Evaluation of the Driving Behavior
4.2.3. Study 4: Evaluation of the Phone Control, Data Logging, and Reporting
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Shabeer, H.A.; Banu, R.W.; Zubar, H.A. Technology to prevent mobile phone accidents. Int. J. Enterp. Netw. Manag. 2012, 5, 144–155. [Google Scholar] [CrossRef]
- Guo, F.; Klauer, S.G.; Fang, Y.; Hankey, J.M.; Antin, J.F.; Perez, M.A.; Lee, S.E.; Dingus, T.A. The effects of age on crash risk associated with driver distraction. Int. J. Epidemiol. 2017, 46, 258–265. [Google Scholar] [CrossRef] [PubMed]
- Ayers, J.W.; Leas, E.C.; Dredze, M.; Allem, J.-P.; Grabowski, J.G.; Hill, L. Pokémon GO—A new distraction for drivers and pedestrians. JAMA Intern. Med. 2016, 176, 1865–1866. [Google Scholar] [CrossRef] [PubMed]
- Burns, P.; Parkes, A.; Burton, S.; Smith, R.; Burch, D. How Dangerous Is Driving with a Mobile Phone?: Benchmarking the Impairment to Alcohol; TRL: Wokingham, UK, 2002; Volume 547. [Google Scholar]
- Oviedo-Trespalacios, O.; Haque, M.M.; King, M.; Washington, S. Understanding the impacts of mobile phone distraction on driving performance: A systematic review. Transp. Res. Part C Emerg. Technol. 2016, 72, 360–380. [Google Scholar] [CrossRef]
- Coxon, K.; Keay, L. Behind the wheel: Community consultation informs adaptation of safe-transport program for older drivers. BMC Res. Notes 2015, 8, 764. [Google Scholar] [CrossRef] [PubMed]
- Drews, F.A.; Pasupathi, M.; Strayer, D.L. Passenger and cell phone conversations in simulated driving. J. Exp. Psychol. Appl. 2008, 14, 392. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.D. Technology and teen drivers. J. Saf. Res. 2007, 38, 203–213. [Google Scholar] [CrossRef] [PubMed]
- Hassan, H.M. Investigation of the self-reported aberrant driving behavior of young male Saudi drivers: A survey-based study. J. Transp. Saf. Secur. 2016, 8, 113–128. [Google Scholar] [CrossRef]
- Danaf, M.; Hamdar, S.H.; Abou-Zeid, M.; Kaysi, I. Comparative assessment of driving behavior at signalized intersections using driving simulators. J. Transp. Saf. Secur. 2018, 10, 124–158. [Google Scholar] [CrossRef]
- Gershon, P.; Zhu, C.; Klauer, S.G.; Dingus, T.; Simons-Morton, B. Teens’ distracted driving behavior: Prevalence and predictors. J. Saf. Res. 2017, 63, 157–161. [Google Scholar] [CrossRef] [PubMed]
- Cen, J.; Wang, Z.; Wang, C.; Liu, F. A System Design for Driving Behavior Analysis and Assessment. In Proceedings of the 2016 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Chengdu, China, 15–18 December 2016; pp. 882–887. [Google Scholar]
- Liu, T.; Yang, Y.; Huang, G.-B.; Yeo, Y.K.; Lin, Z. Driver distraction detection using semi-supervised machine learning. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1108–1120. [Google Scholar] [CrossRef]
- He, J.; Choi, W.; McCarley, J.S.; Chaparro, B.S.; Wang, C. Texting while driving using Google Glass™: Promising but not distraction-free. Accid. Anal. Prev. 2015, 81, 218–229. [Google Scholar] [CrossRef] [PubMed]
- Fazeen, M.; Gozick, B.; Dantu, R.; Bhukhiya, M.; González, M.C. Safe driving using mobile phones. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1462–1468. [Google Scholar] [CrossRef]
- Lu, D.-N.; Nguyen, D.-N.; Nguyen, T.-H.; Nguyen, H.-N. A Novel Mobile Online Vehicle Status Awareness Method Using Smartphone Sensors. In Information Science and Applications; Springer: Singapore, 2017; pp. 30–37. [Google Scholar]
- Lu, S.-N.; Tseng, H.-W.; Lee, Y.-H.; Jan, Y.-G.; Lee, W.-C. Intelligent safety warning and alert system for car driving. Tamkang J. Sci. Eng. 2010, 13, 395–404. [Google Scholar]
- Oviedo-Trespalacios, O.; King, M.; Vaezipour, A.; Truelove, V. Can our phones keep us safe? A content analysis of smartphone applications to prevent mobile phone distracted driving. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 657–668. [Google Scholar] [CrossRef]
- Delgado, M.K.; McDonald, C.C.; Winston, F.K.; Halpern, S.D.; Buttenheim, A.M.; Setubal, C.; Huang, Y.; Saulsgiver, K.A.; Lee, Y.C. Attitudes on technological, social, and behavioral economic strategies to reduce cellphone use among teens while driving. Traffic Inj. Prev. 2018, 19, 569–576. [Google Scholar] [CrossRef] [PubMed]
- Ajzen, I. Constructing a TPB questionnaire: Conceptual and methodological considerations. 2002. Available online: http://chuang.epage.au.edu.tw/ezfiles/168/1168/attach/20/pta_41176_7688352_57138.pdf (accessed on 28 March 2019).
- Lancaster, H.O.; Seneta, E. Chi-square distribution. Encycl. Biostzatistics 2005, 2. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Duration | Actions |
|---|---|
| 0 s–10 s | Normal |
| 10 s–20 s | Turn left |
| 20 s–30 s | Turn right |
| 30 s–40 s | Sudden change lane toward right |
| 40 s–50 s | Sudden change lane toward left |
| 50 s–60 s | U-turn(leftward) |
| 60 s–70 s | Sudden acceleration |
| 70 s | Harsh brake |
| Question | Prediction | Reject or Accept Depending on Chi-Squared Distribution |
|---|---|---|
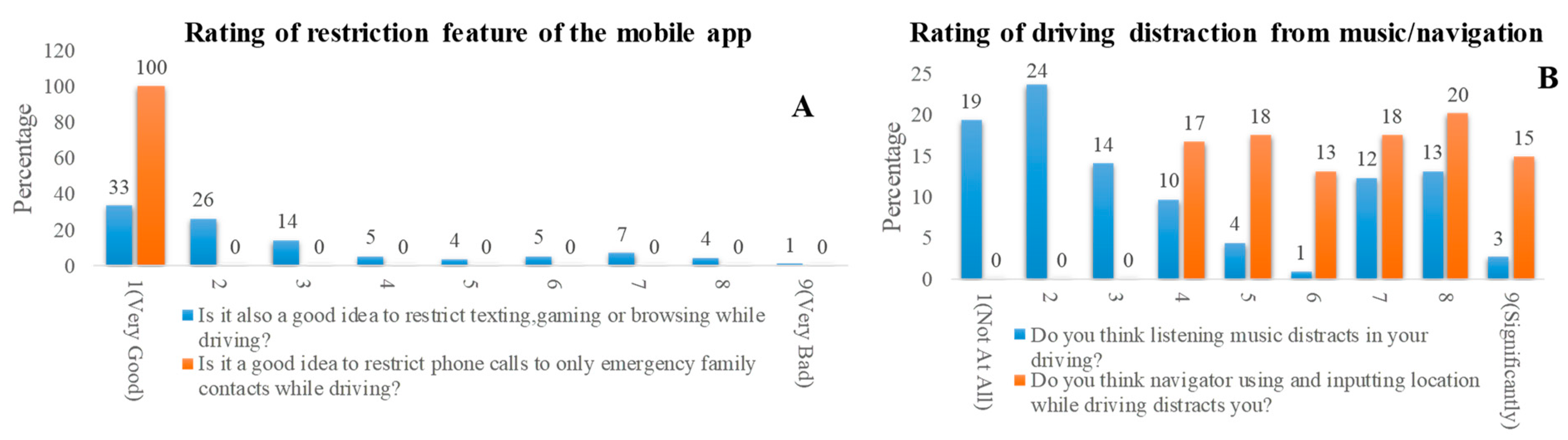
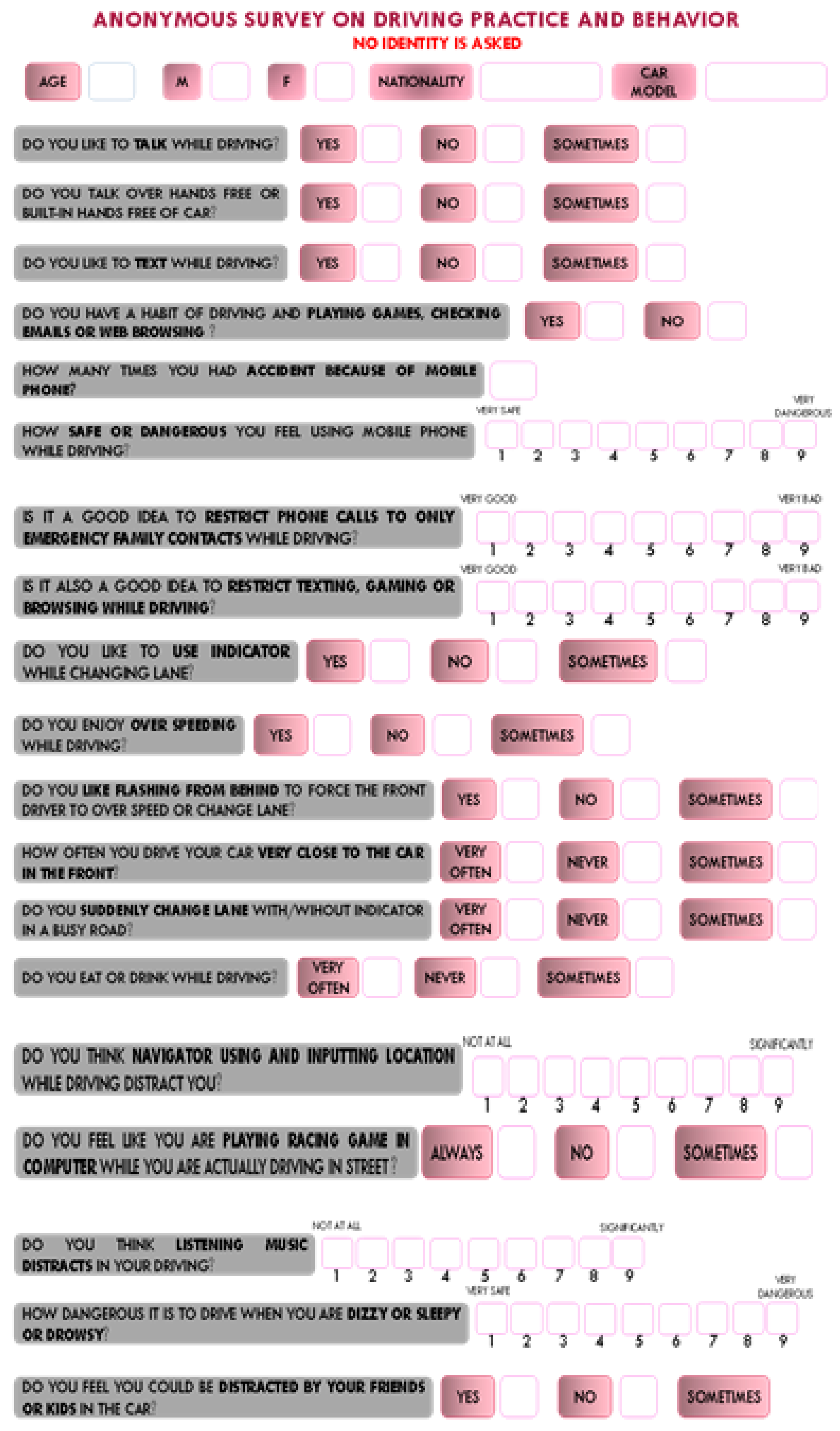
| Is it a good idea to restrict phone calls to only emergency family contacts while driving? | Almost all of them should say that it is a very good idea | Accept, which is a good motivation to the development of the prototype |
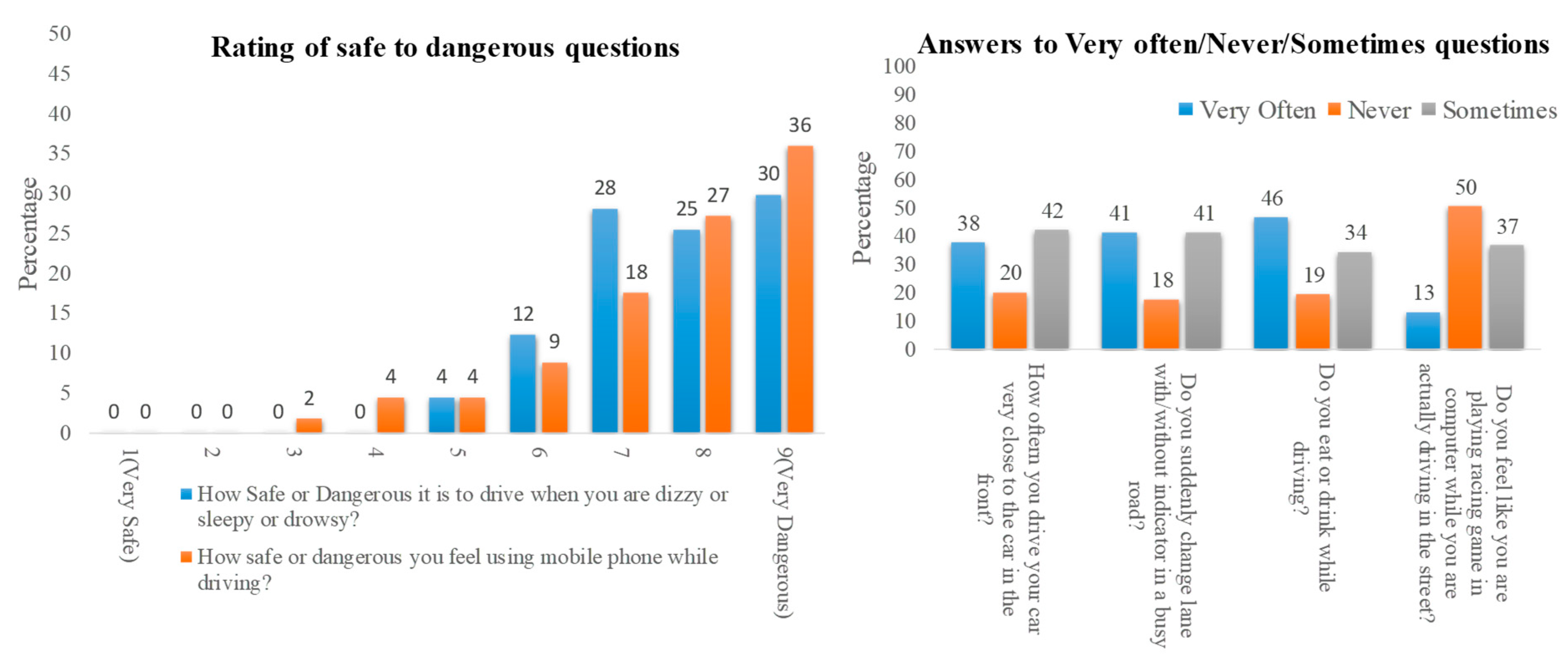
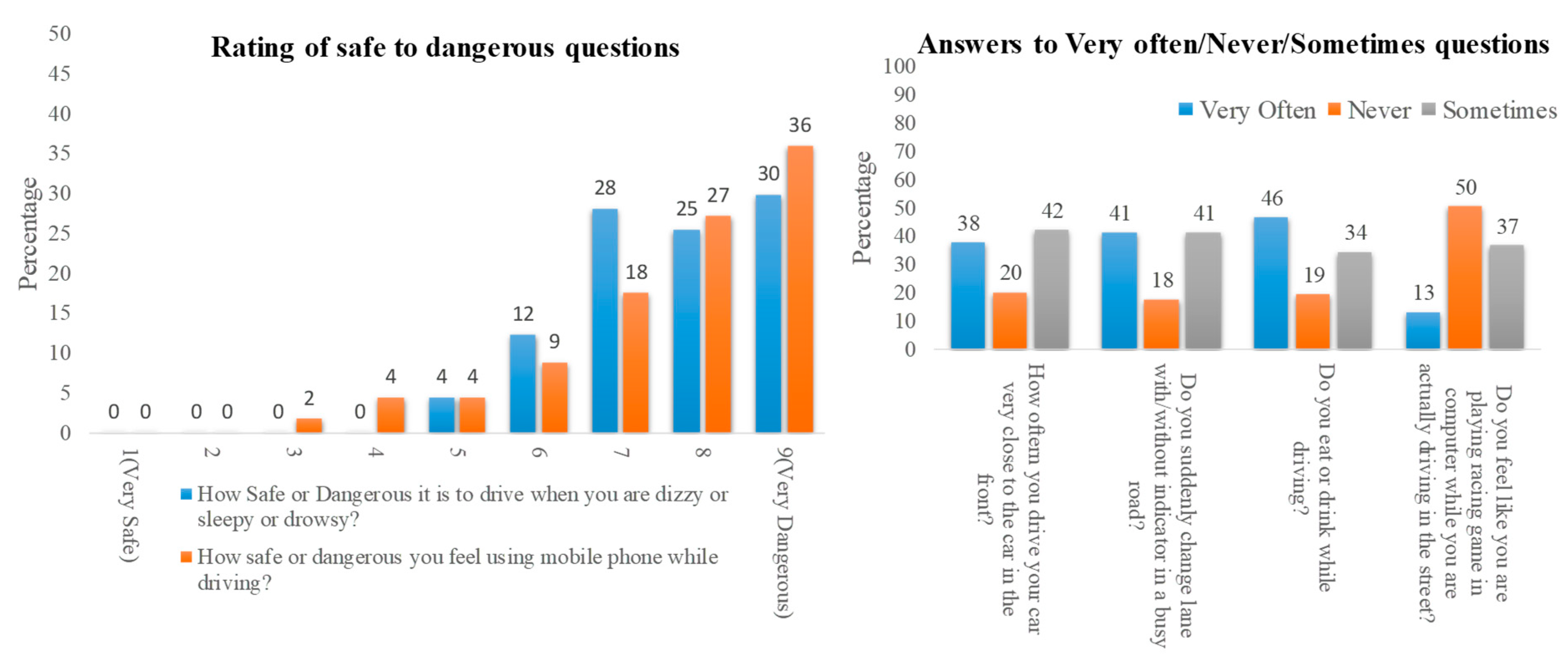
| How safe or dangerous do you feel using mobile phone while driving? | Almost all of them should say that it is very dangerous | Reject which is a good motivation to increase awareness about it among them. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khandakar, A.; Chowdhury, M.E.H.; Ahmed, R.; Dhib, A.; Mohammed, M.; Al-Emadi, N.A.M.A.; Michelson, D. Portable System for Monitoring and Controlling Driver Behavior and the Use of a Mobile Phone While Driving. Sensors 2019, 19, 1563. https://doi.org/10.3390/s19071563
Khandakar A, Chowdhury MEH, Ahmed R, Dhib A, Mohammed M, Al-Emadi NAMA, Michelson D. Portable System for Monitoring and Controlling Driver Behavior and the Use of a Mobile Phone While Driving. Sensors. 2019; 19(7):1563. https://doi.org/10.3390/s19071563
Chicago/Turabian StyleKhandakar, Amith, Muhammad E.H. Chowdhury, Rashid Ahmed, Ahmed Dhib, Mohammed Mohammed, Nasser Ahmed M A Al-Emadi, and Dave Michelson. 2019. "Portable System for Monitoring and Controlling Driver Behavior and the Use of a Mobile Phone While Driving" Sensors 19, no. 7: 1563. https://doi.org/10.3390/s19071563
APA StyleKhandakar, A., Chowdhury, M. E. H., Ahmed, R., Dhib, A., Mohammed, M., Al-Emadi, N. A. M. A., & Michelson, D. (2019). Portable System for Monitoring and Controlling Driver Behavior and the Use of a Mobile Phone While Driving. Sensors, 19(7), 1563. https://doi.org/10.3390/s19071563