Deformation Monitoring of Earth Fissure Hazards Using Terrestrial Laser Scanning

 ,
, 
Abstract
1. Introduction
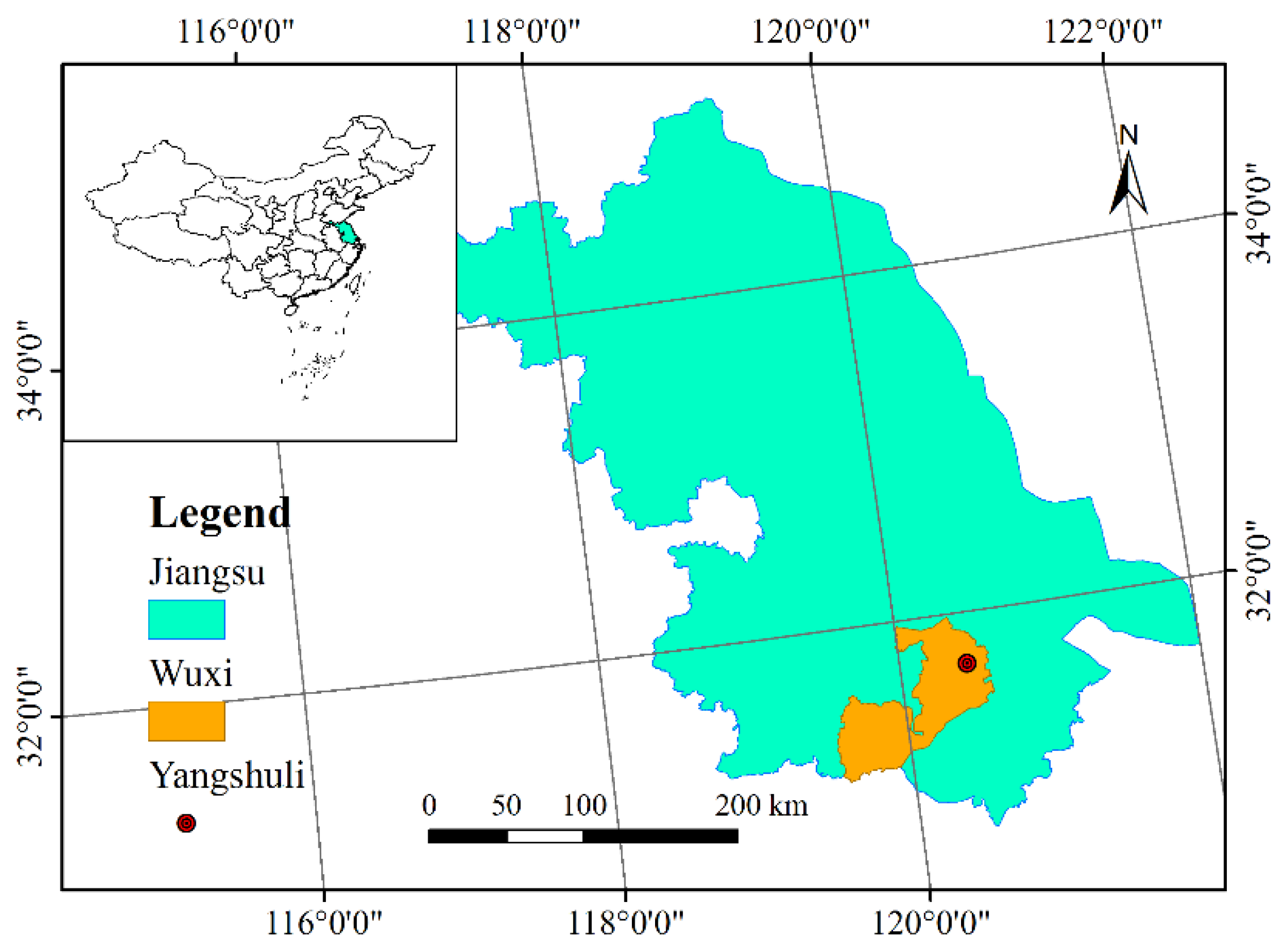
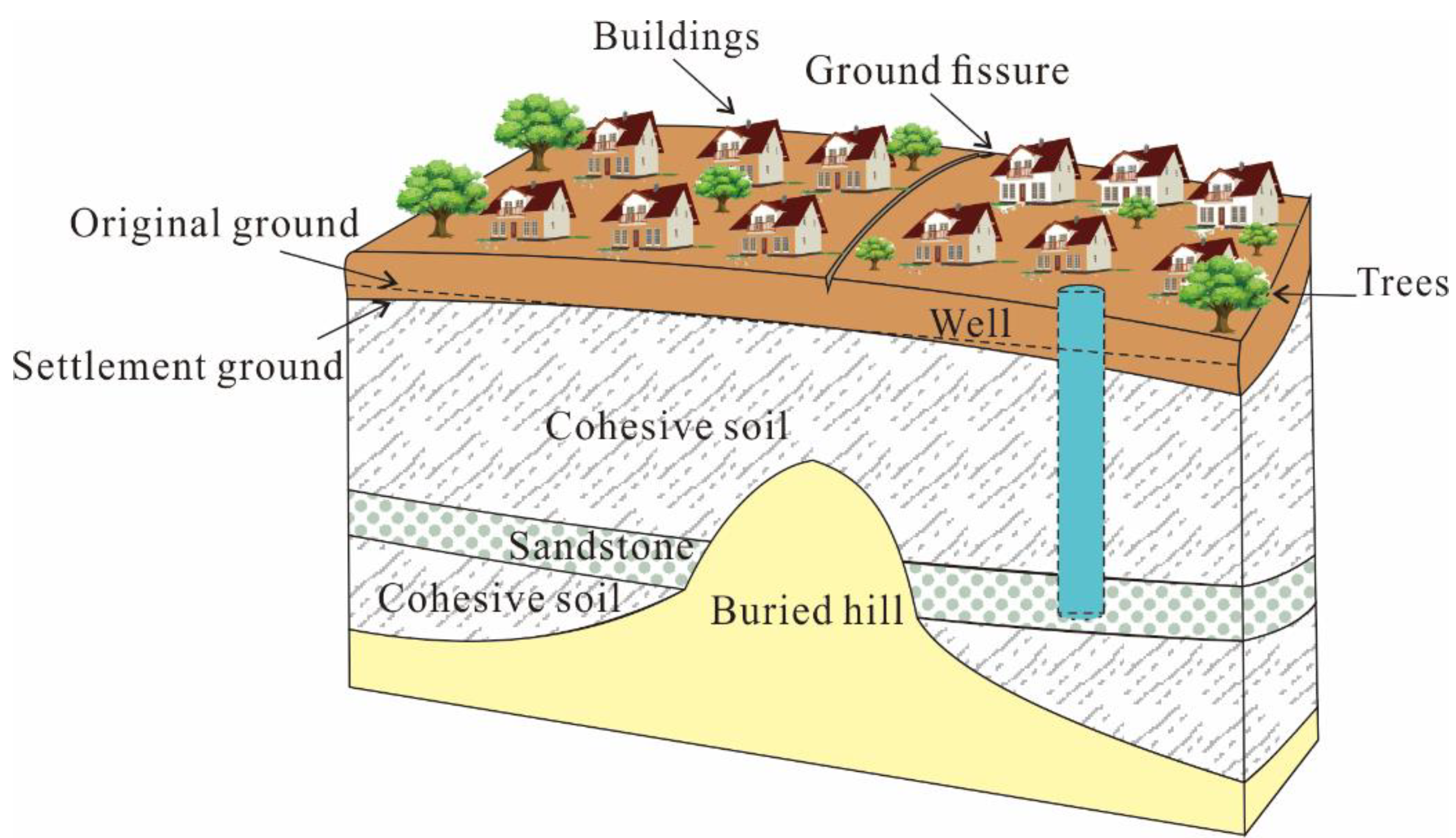
2. Study Area
3. Data Preparation
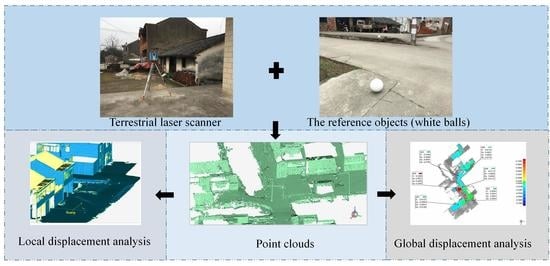
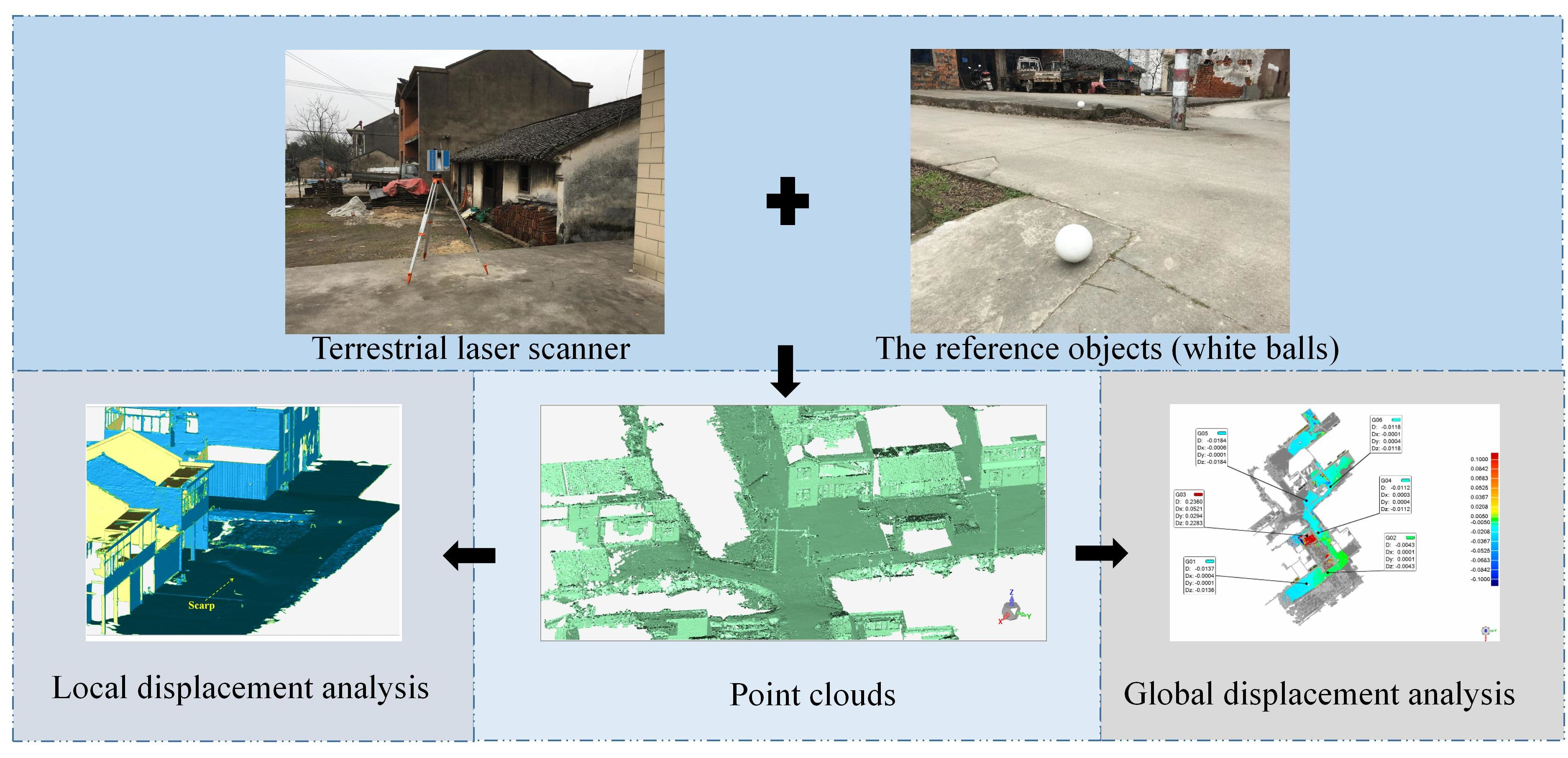
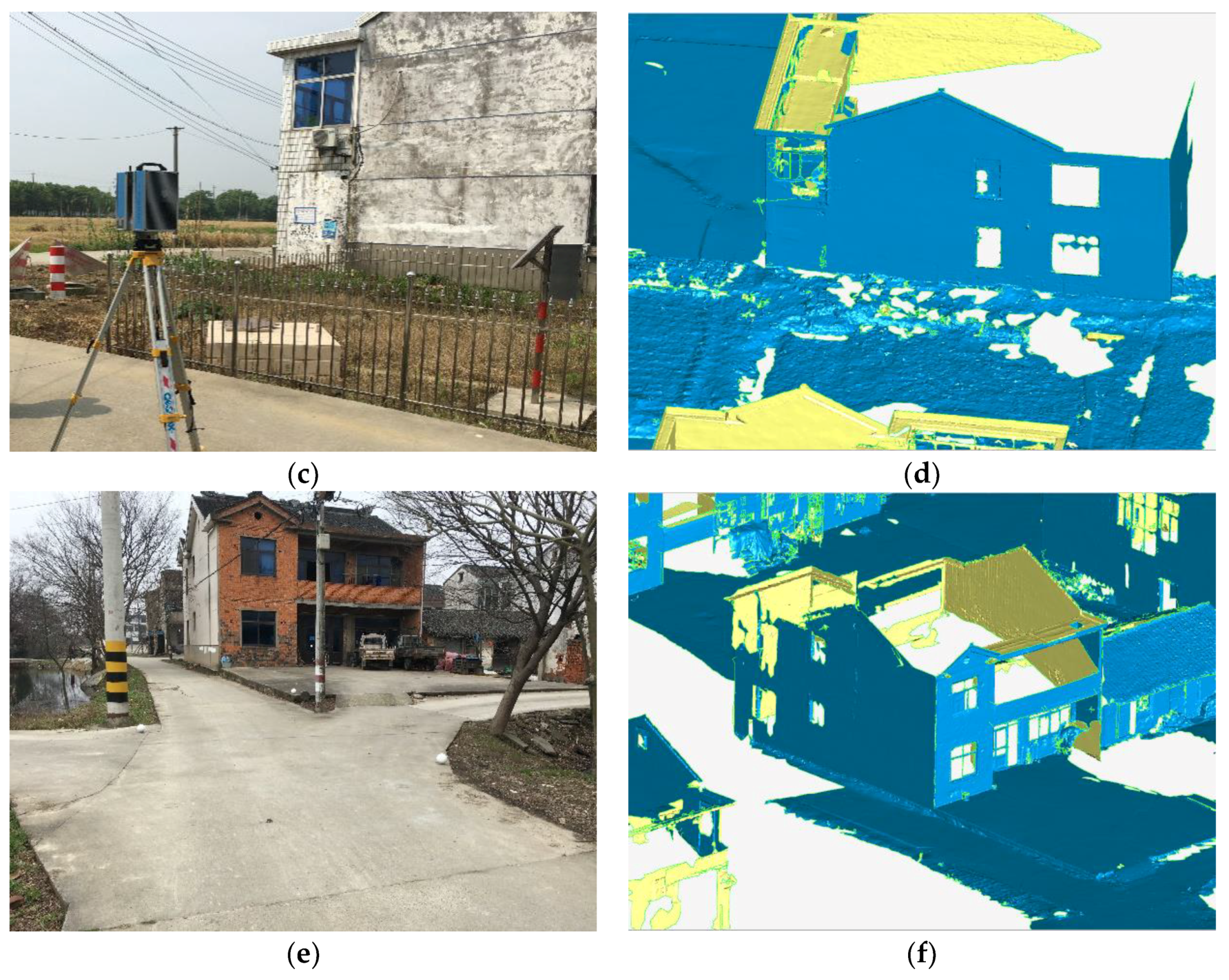
3.1. Laser Scan Testing
3.2. Data Pre-Processing
4. Results
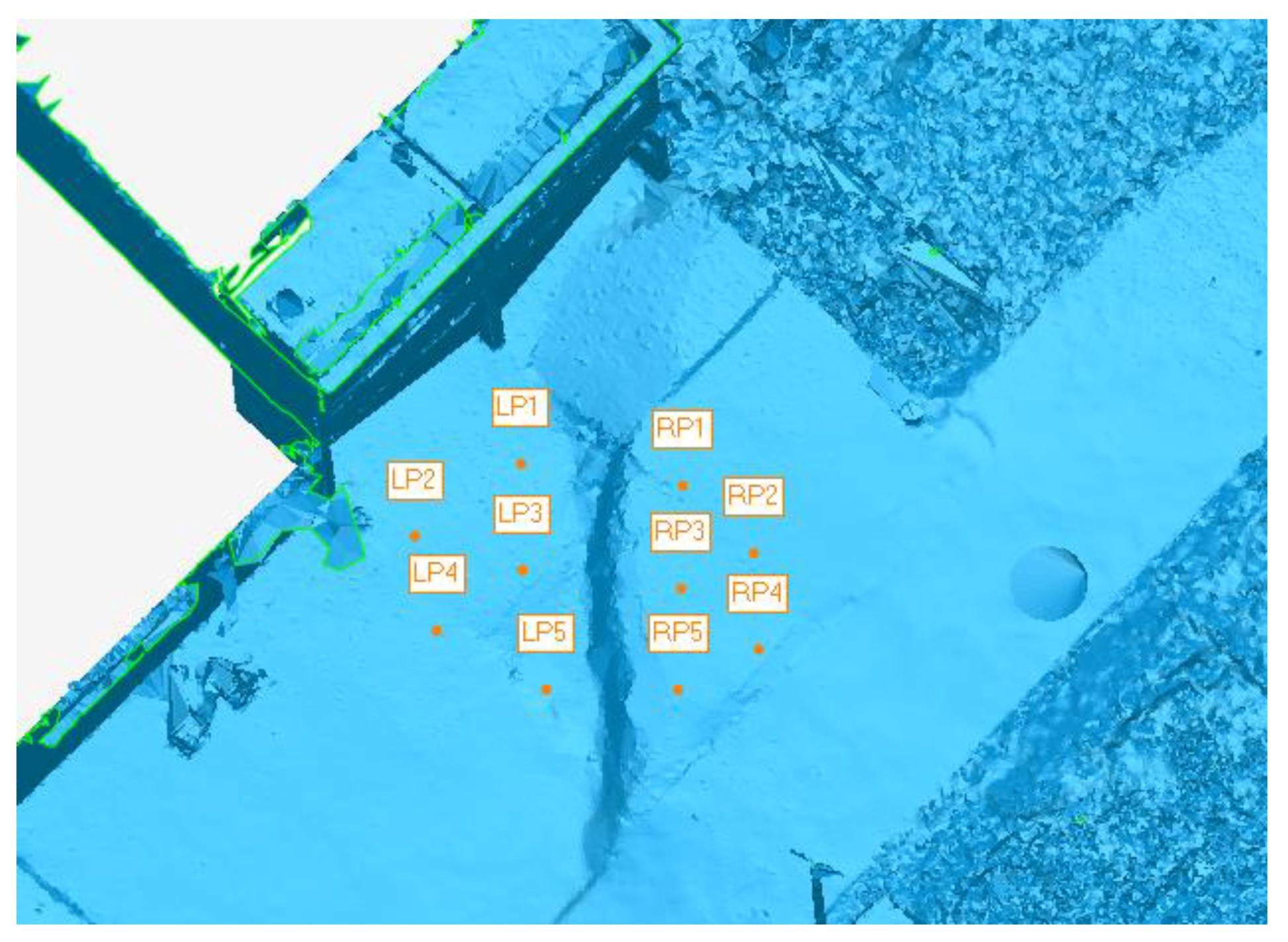
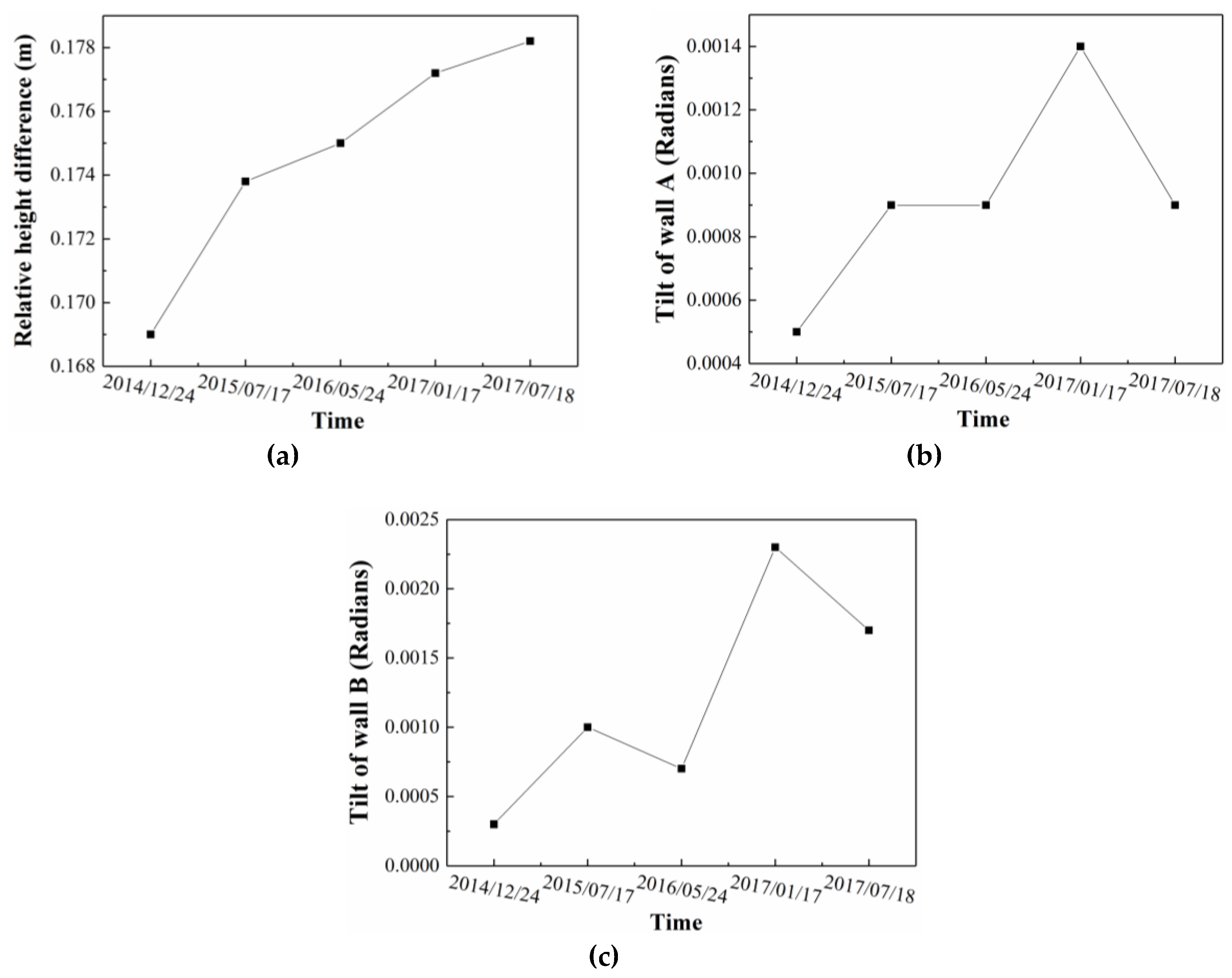
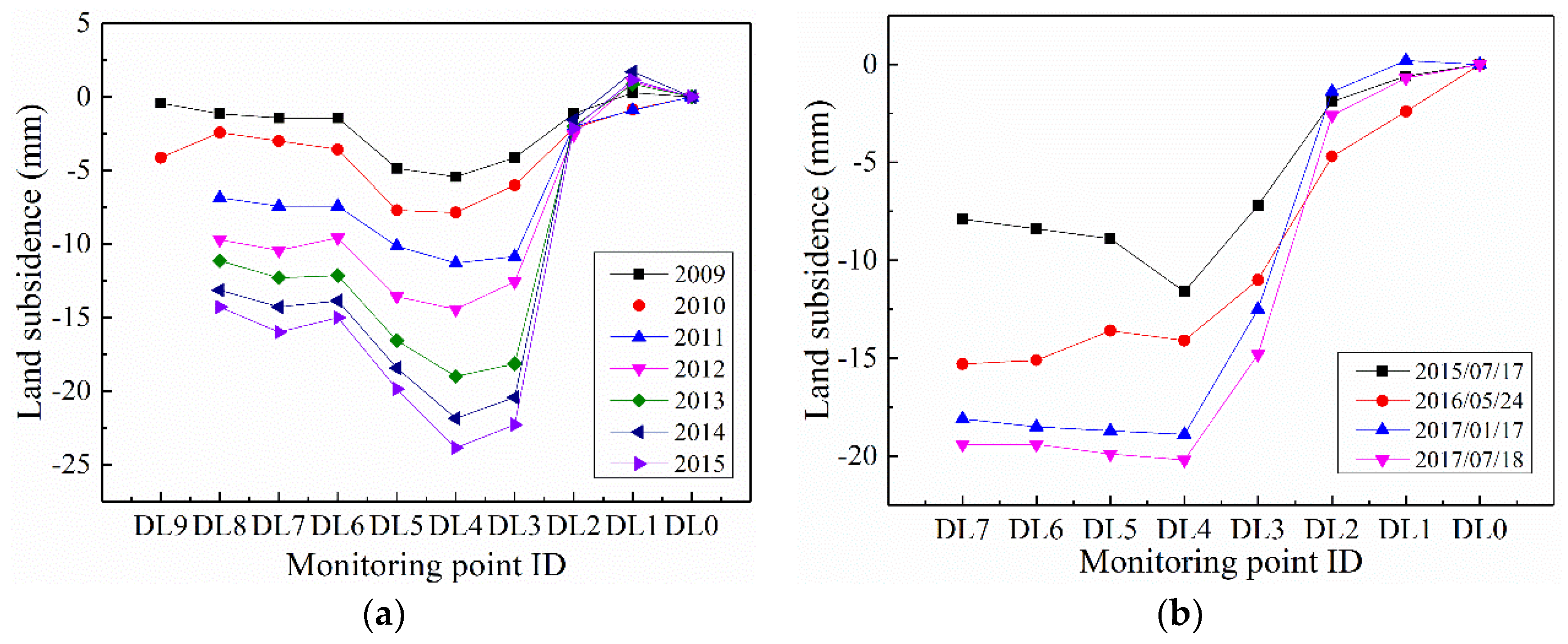
4.1. Local Displacement Analysis
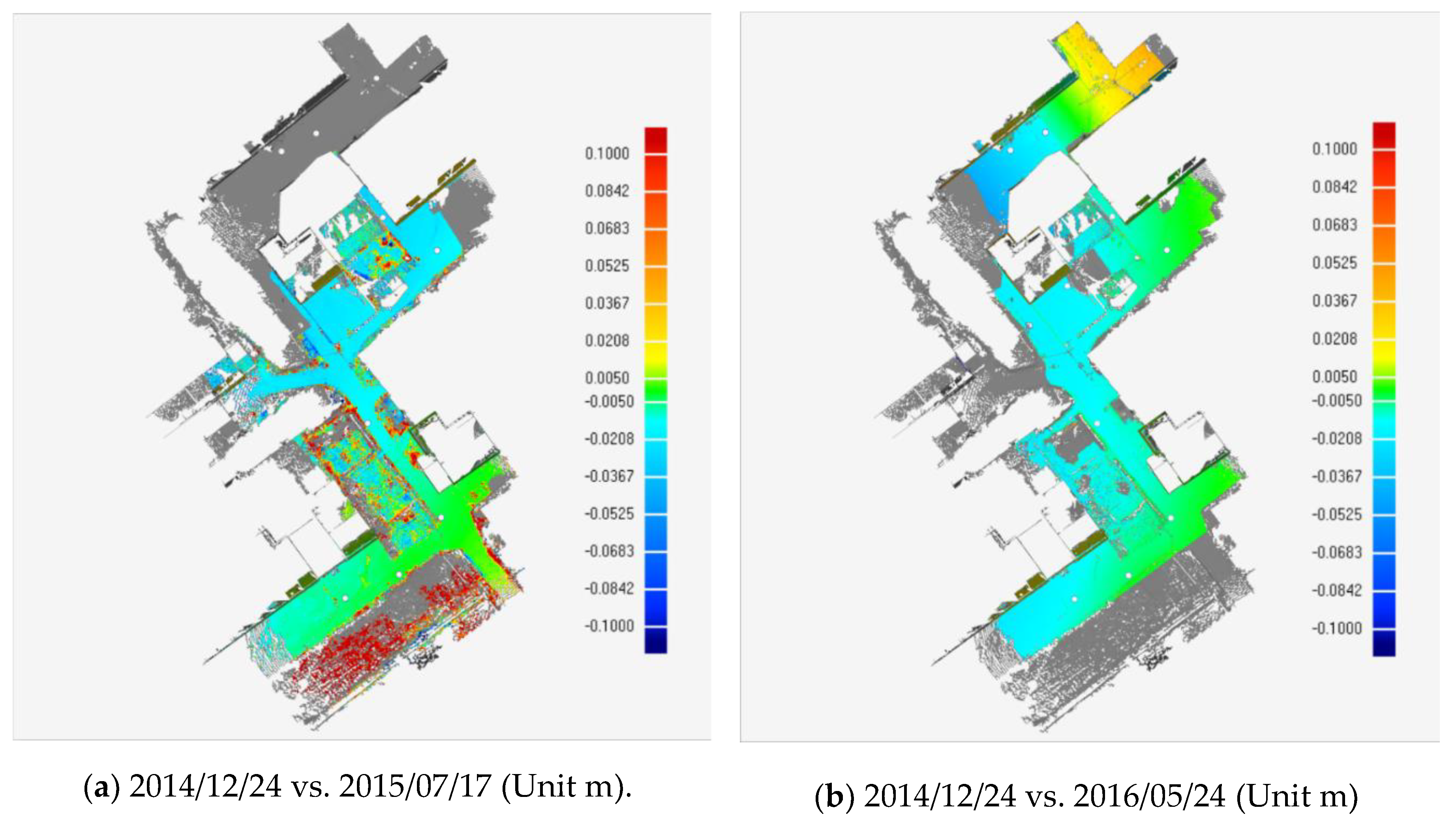
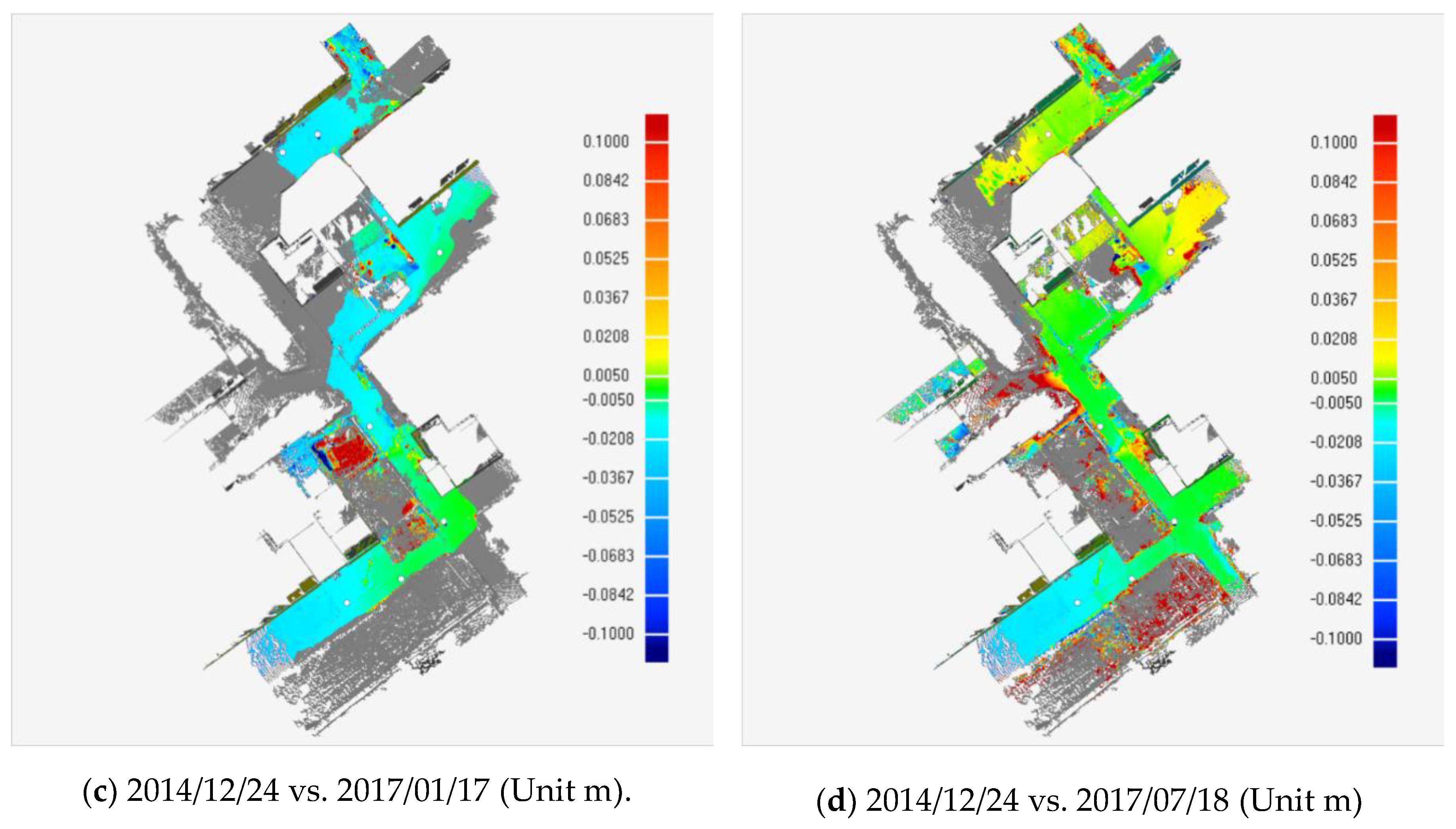
4.2. Global Displacement Analysis
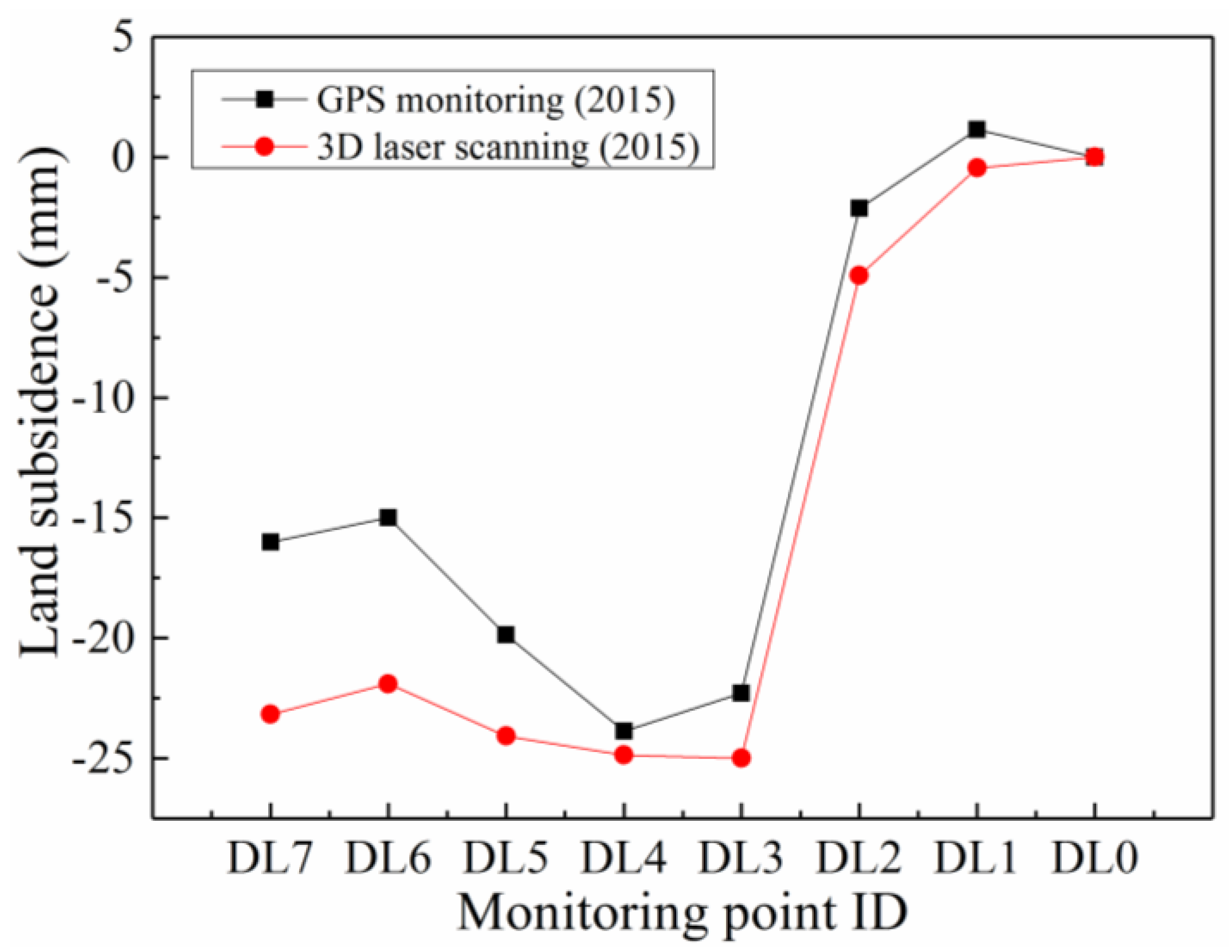
5. Discussions
- (1)
- The influences of human activities on the GPS monitoring, which is regarded as one of the most probable causes. With the development of society and the increase in population, the demand for land is on the rise. Some monitoring points (i.e., DL8 and DL9) and datum points were destroyed, which it is unavoidable in areas with intensive human activities. As DL6 and DL7 are closer to the new buildings, they will encounter more interference from human activities with higher probability.
- (2)
- The errors introduced by data transformation are another most likely reason, as the hypothesis of the same average daily or monthly settlement is not 100% reasonable. Unfortunately, there is not enough available data to make the comparison and justify the TLS method. Therefore, the assumption has to be made to complete the data transformation.
- (3)
- The errors coming from the process of point cloud alignment. When performing the control point alignment (e.g., feature-based alignment), at least 3 base points are required to be carefully selected, at the same positions, in both the reference and the test point clouds. Due to measurement errors and noise, some position differences may be generated, but this bias can be greatly reduced by careful calibration.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, G.Y.; You, G.; Shi, B.; Qiu, Z.L.; Li, H.Y.; Tuck, M. Earth fissures in Jiangsu Province, China and geological investigation of Hetang earth fissure. Environ. Earth Sci. 2010, 60, 35–43. [Google Scholar] [CrossRef]
- Sato, H.P.; Abe, K.; Ootaki, O. GPS-measured land subsidence in Ojiya city, Niigata prefecture, Japan. Eng. Geol. 2003, 67, 379–390. [Google Scholar] [CrossRef]
- Abidin, H.Z.; Andreas, H.; Djaja, R.; Darmawan, D.; Gamal, M. Land subsidence characteristics of Jakarta between 1997 and 2005, as estimated using GPS surveys. GPS Solut. 2008, 12, 23–32. [Google Scholar] [CrossRef]
- Baldi, P.; Casula, G.; Cenni, N.; Loddo, F.; Pesci, A. GPS-based monitoring of land subsidence in the Po Plain (Northern Italy). Earth Planet. Sci. Lett. 2009, 288, 204–212. [Google Scholar] [CrossRef]
- Ustun, A.; Tusat, E.; Yalvac, S. Preliminary results of land subsidence monitoring project in Konya Closed Basin between 2006–2009 by means of GNSS observations. Nat. Hazards Earth Syst. Sci. 2010, 10, 1151–1157. [Google Scholar] [CrossRef]
- Amelung, F.; Galloway, D.L.; Bell, J.W.; Zebker, H.A.; Laczniak, R.J. Sensing the ups and downs of Las Vegas: InSAR reveals structural control of land subsidence and aquifer-system deformation. Geology 1999, 27, 483–486. [Google Scholar] [CrossRef]
- Chaussard, E.; Wdowinski, S.; Cabral-Cano, E.; Amelung, F. Land subsidence in central Mexico detected by ALOS InSAR time-series. Remote Sens. Environ. 2014, 140, 94–106. [Google Scholar] [CrossRef]
- Chen, M.; Tomás, R.; Li, Z.; Motagh, M.; Li, T.; Hu, L.; Gong, X. Imaging land subsidence induced by groundwater extraction in Beijing (China) using satellite radar interferometry. Remote Sens. 2016, 8, 468. [Google Scholar] [CrossRef]
- Wilkinson, M.; McCaffrey KJ, W.; Roberts, G.; Cowie, P.A.; Phillips, R.J.; Michetti, A.M.; Yates, A. Partitioned postseismic deformation associated with the 2009 Mw 6.3 L’Aquila earthquake surface rupture measured using a terrestrial laser scanner. Geophys. Res. Lett. 2010, 37, 1–7. [Google Scholar] [CrossRef]
- Xu, H.; Li, H.; Yang, X.; Qi, S.; Zhou, J. Integration of Terrestrial Laser Scanning and NURBS Modeling for the Deformation Monitoring of an Earth-Rock Dam. Sensors 2019, 19, 22. [Google Scholar] [CrossRef] [PubMed]
- Corsini, A.; Castagnetti, C.; Bertacchini, E.; Rivola, R.; Ronchetti, F.; Capra, A. Integrating airborne and multi-temporal long-range terrestrial laser scanning with total station measurements for mapping and monitoring a compound slow moving rock slide. Earth Surf. Process. Landf. 2013, 38, 1330–1338. [Google Scholar] [CrossRef]
- Abellán, A.; Oppikofer, T.; Jaboyedoff, M.; Rosser, N.J.; Lim, M.; Lato, M.J. Terrestrial laser scanning of rock slope instabilities. Earth Surf. Process. Landf. 2014, 39, 80–97. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Oppikofer, T.; Jaboyedoff, M.; Blikra, L.; Derron, M.H.; Metzger, R. Characterization and monitoring of the Åknes rockslide using terrestrial laser scanning. Nat. Hazards Earth Syst. Sci. 2009, 9, 1003–1019. [Google Scholar] [CrossRef]
- Kasperski, J.; Delacourt, C.; Allemand, P.; Potherat, P.; Jaud, M.; Varrel, E. Application of a terrestrial laser scanner (TLS) to the study of the Séchilienne Landslide (Isère, France). Remote Sens. 2010, 2, 2785–2802. [Google Scholar] [CrossRef]
- Abellán, A.; Jaboyedoff, M.; Oppikofer, T.; Vilaplana, J.M. Detection of millimetric deformation using a terrestrial laser scanner: experiment and application to a rockfall event. Nat. Hazards Earth Syst. Sci. 2009, 9, 365–372. [Google Scholar] [CrossRef]
- Rosser, N.J.; Petley, D.N.; Lim, M.; Dunning, S.A.; Allison, R.J. Terrestrial laser scanning for monitoring the process of hard rock coastal cliff erosion. Q. J. Eng. Geol. Hydrogeol. 2005, 38, 363–375. [Google Scholar] [CrossRef]
- Fekete, S.; Diederichs, M.; Lato, M. Geotechnical and operational applications for 3-dimensional laser scanning in drill and blast tunnels. Tunn. Undergr. Space Technol. 2010, 25, 614–628. [Google Scholar] [CrossRef]
- Zhou, D.; Wu, K.; Chen, R.; Li, L. GPS/terrestrial 3D laser scanner combined monitoring technology for coal mining subsidence: A case study of a coal mining area in Hebei, China. Nat. Hazards 2014, 70, 1197–1208. [Google Scholar] [CrossRef]
- Tong, X.; Liu, X.; Chen, P.; Liu, S.; Luan, K.; Li, L.; Hong, Z. Integration of UAV-based photogrammetry and terrestrial laser scanning for the three-dimensional mapping and monitoring of open-pit mine areas. Remote Sens. 2015, 7, 6635–6662. [Google Scholar] [CrossRef]
- Jiao, X. Fatalness Assessment of Earth Fissure Hazard in Suxichang Area Based on GA-ANN Technology. Master Thesis, Jilin University, Changchun, China, 2007. [Google Scholar]
- Zhang, Y.; Wang, Z.; Xue, Y.; Wu, J.; Yu, J. Mechanisms for earth fissure formation due to groundwater extraction in the su-xi-chang area, china. Bull. Eng. Geol. Environ. 2016, 75, 745–760. [Google Scholar] [CrossRef]
- Rusu, R.B.; Marton, Z.C.; Blodow, N.; Dolha, M.; Beetz, M. Towards 3D point cloud based object maps for household environments. Robot. Auton. Syst. 2008, 56, 927–941. [Google Scholar] [CrossRef]
- Park, S.Y.; Subbarao, M. An accurate and fast point-to-plane registration technique. Pattern Recognit. Lett. 2003, 24, 2967–2976. [Google Scholar] [CrossRef]
- Xie, Z.; Xu, S.; Li, X. A high-accuracy method for fine registration of overlapping point clouds. Image Vis. Comput. 2010, 28, 563–570. [Google Scholar] [CrossRef]
- Wu, H.; Li, Y.; Li, J.; Gong, J. A two-step displacement correction algorithm for registration of lidar point clouds and aerial images without orientation parameters. Photogramm. Eng. Remote Sens. 2010, 76, 1135–1145. [Google Scholar] [CrossRef]
- Weinmann, M.; Weinmann, M.; Hinz, S.; Jutzi, B. Fast and automatic image-based registration of TLS data. Isprs J. Photogramm. Remote Sens. 2011, 66, S62–S70. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Points Count | Data Volume | Scanning Distance | Average Resolution | Scanning Area |
|---|---|---|---|---|---|
| 2014/12/24 | 30570695 | 2.04 GB | <50 m | 1.80 cm | 56166.0984 m2 |
| 2015/07/17 | 4502430 | 142 MB | <50 m | 2.97 cm | 4843.8722 m2 |
| 2016/05/24 | 21036083 | 667 MB | <50 m | 1.26 cm | 3938.9993 m2 |
| 2017/01/17 | 14199141 | 444 MB | <50 m | 1.85 cm | 4855.5652 m2 |
| 2017/07/18 | 14940684 | 1.02 GB | <50 m | 3.70 cm | 46682.9980 m2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, Y.; Tang, H.; Gong, X.; Zhao, B.; Lu, Y.; Chen, Y.; Lin, Z.; Chen, H.; Qiu, Y. Deformation Monitoring of Earth Fissure Hazards Using Terrestrial Laser Scanning. Sensors 2019, 19, 1463. https://doi.org/10.3390/s19061463
Ge Y, Tang H, Gong X, Zhao B, Lu Y, Chen Y, Lin Z, Chen H, Qiu Y. Deformation Monitoring of Earth Fissure Hazards Using Terrestrial Laser Scanning. Sensors. 2019; 19(6):1463. https://doi.org/10.3390/s19061463
Chicago/Turabian StyleGe, Yunfeng, Huiming Tang, Xulong Gong, Binbin Zhao, Yi Lu, Yong Chen, Zishan Lin, Hongzhi Chen, and Yashi Qiu. 2019. "Deformation Monitoring of Earth Fissure Hazards Using Terrestrial Laser Scanning" Sensors 19, no. 6: 1463. https://doi.org/10.3390/s19061463
APA StyleGe, Y., Tang, H., Gong, X., Zhao, B., Lu, Y., Chen, Y., Lin, Z., Chen, H., & Qiu, Y. (2019). Deformation Monitoring of Earth Fissure Hazards Using Terrestrial Laser Scanning. Sensors, 19(6), 1463. https://doi.org/10.3390/s19061463