Research on a Face Real-time Tracking Algorithm Based on Particle Filter Multi-Feature Fusion

Abstract
1. Introduction
2. Particle Filter Algorithm
2.1. Sequential Importance Sampling
2.2. Importance Density Function Selection
2.3. Resampling Technique
3. Results Particle Filter with Multi Features Fusion
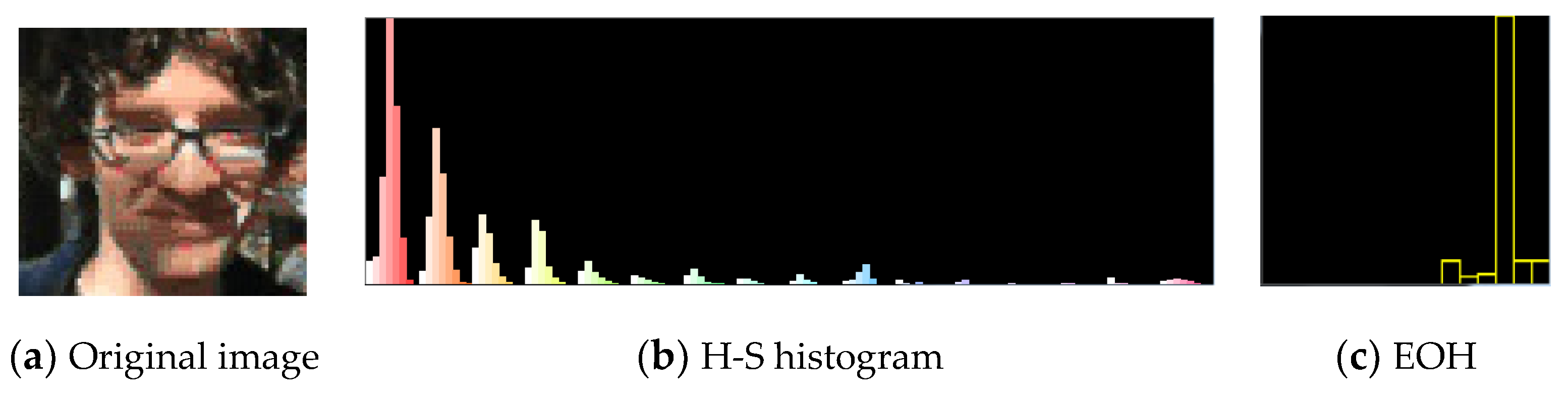
3.1. Color Feature Description
3.2. Edge Feature Description
3.3. Features Fusion Strategy
4. Face-Tracking System
4.1. Dynamic Model
4.2. Face Tracking with Self-Updating Tracking Window
4.3. Updating Model
4.4. The Integral Histogram of the Image
4.5. Tracking Algorithm Procedure
- 3.1
- Sample particles from p(, i = 1, ···, N;
- 3.2
- Calculate the color likelihood p(yc|x) according to Equation (22);
- 3.3
- Calculate the gradient likelihood p(ye|x) according to Equation (25);
- 3.4
- Calculate the weight of each feature according to Equation (27), and normalize θc,θe by Equation (18);
- 3.5
- Calculate the entire observation likelihood p(yt|x) according to Equation (26);
- 3.6
- Calculate the weight according to Equation (30);
- 3.7
- Normalize weight
5. Experimental Results and Analysis
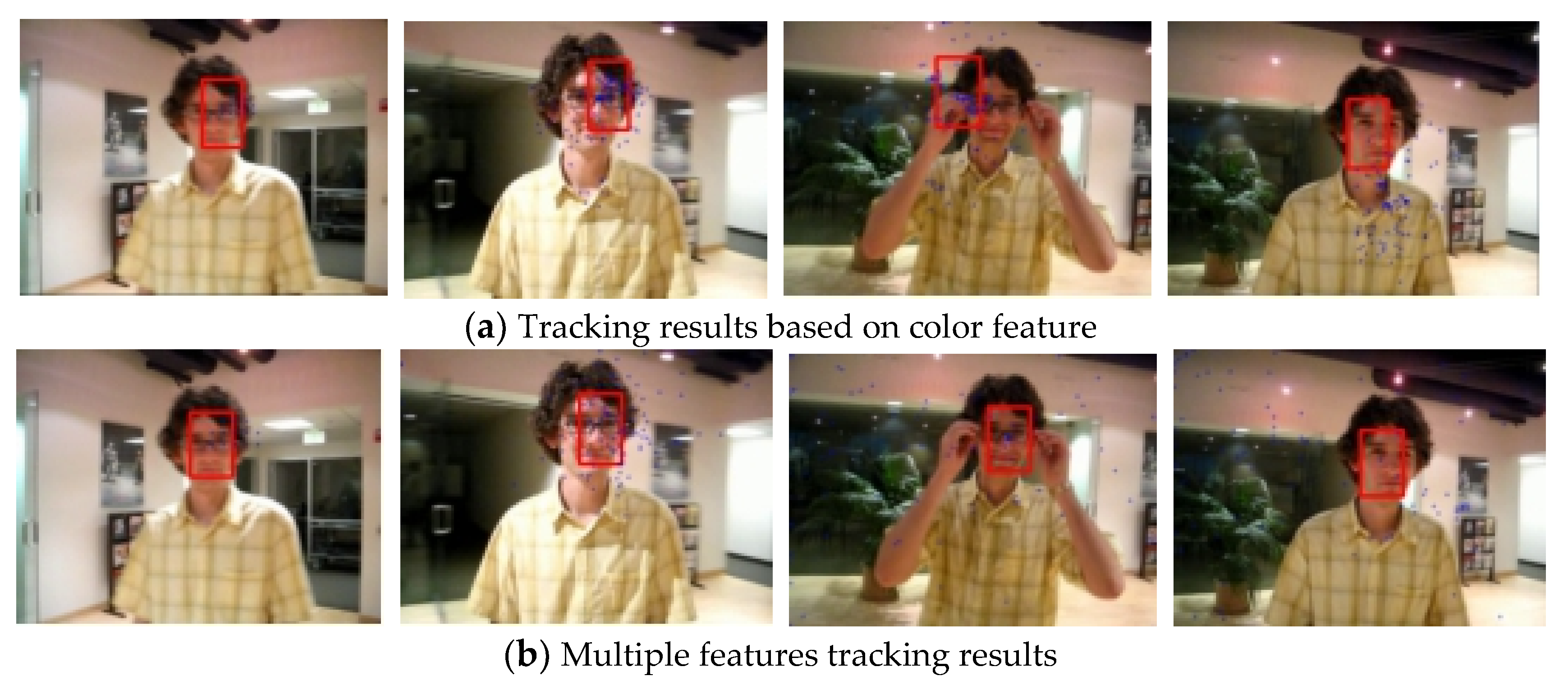
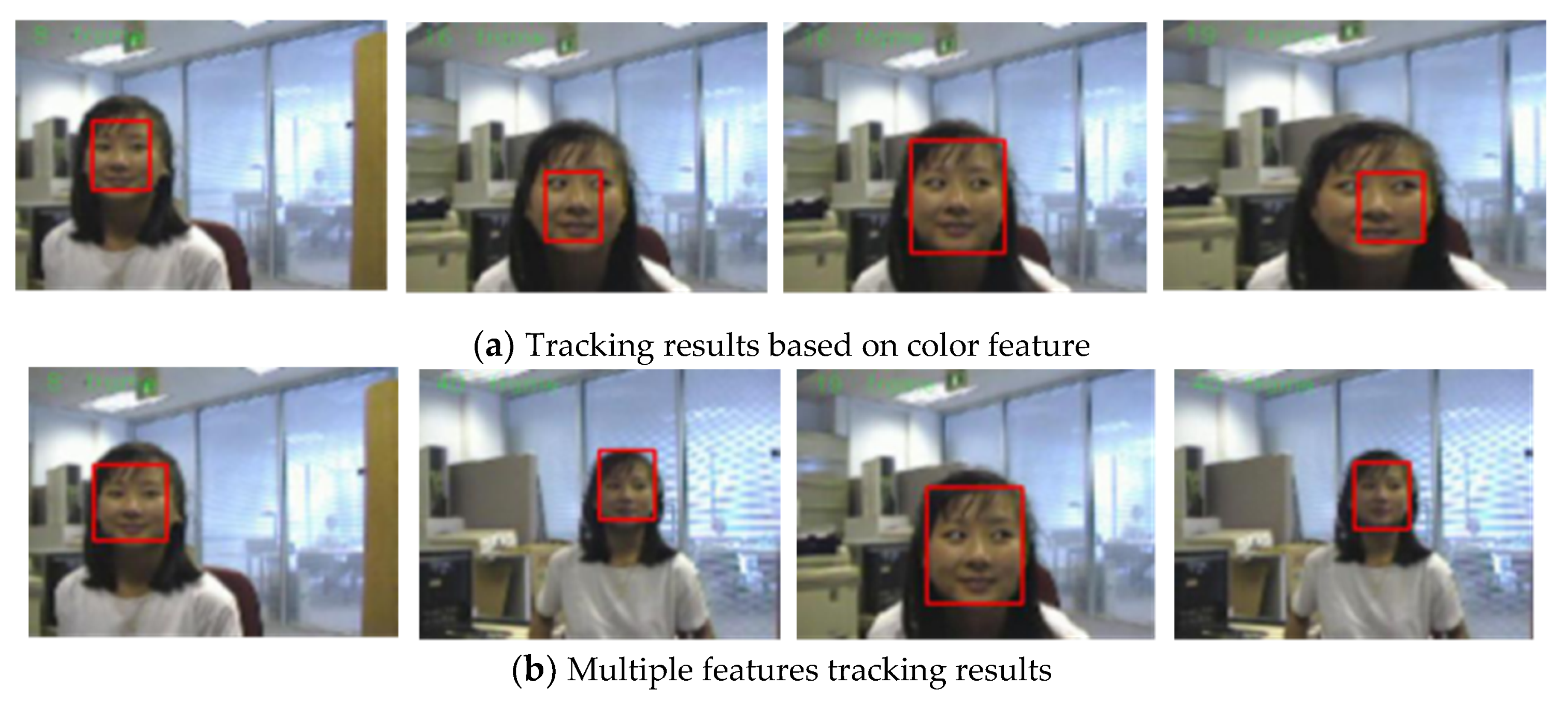
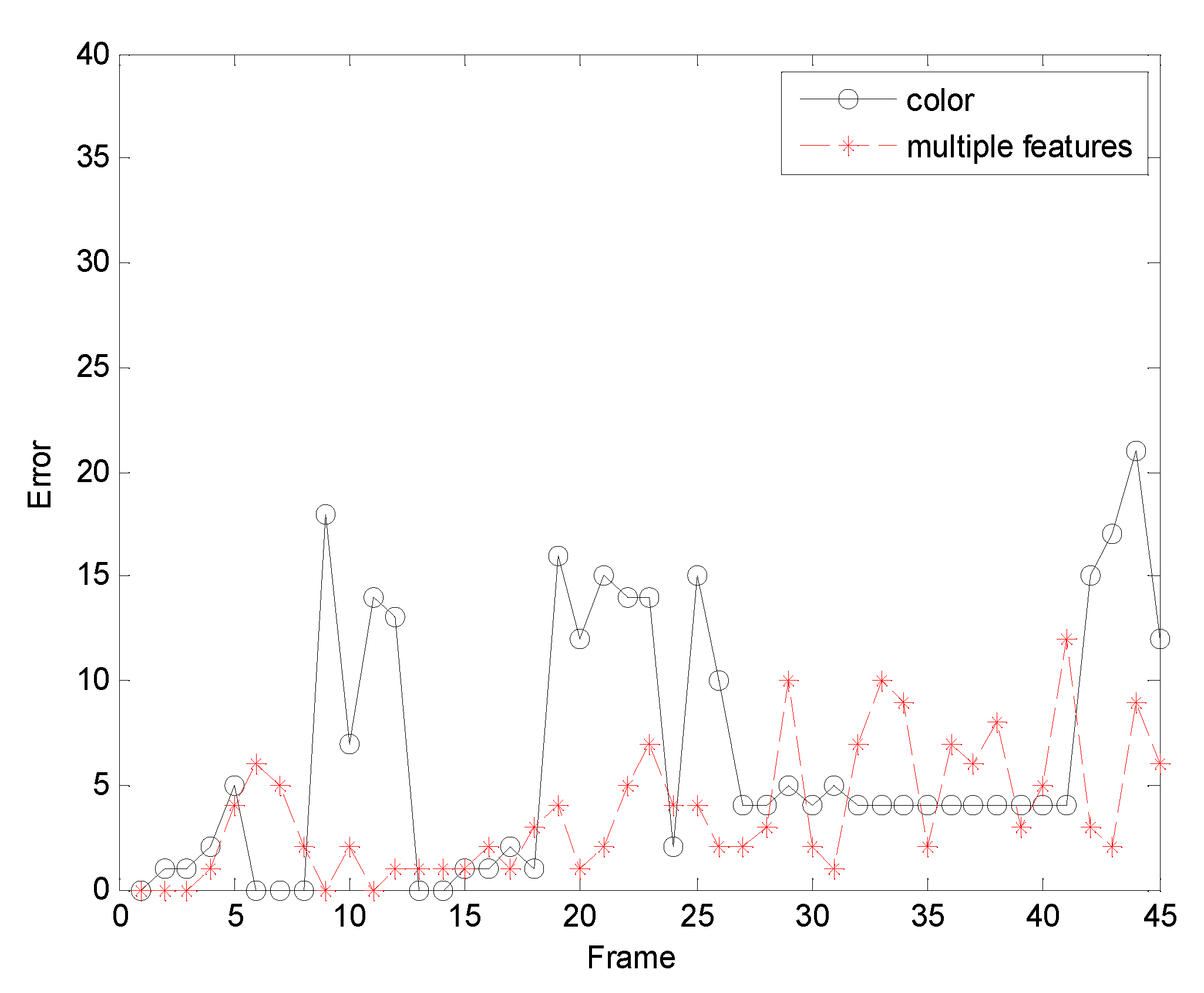
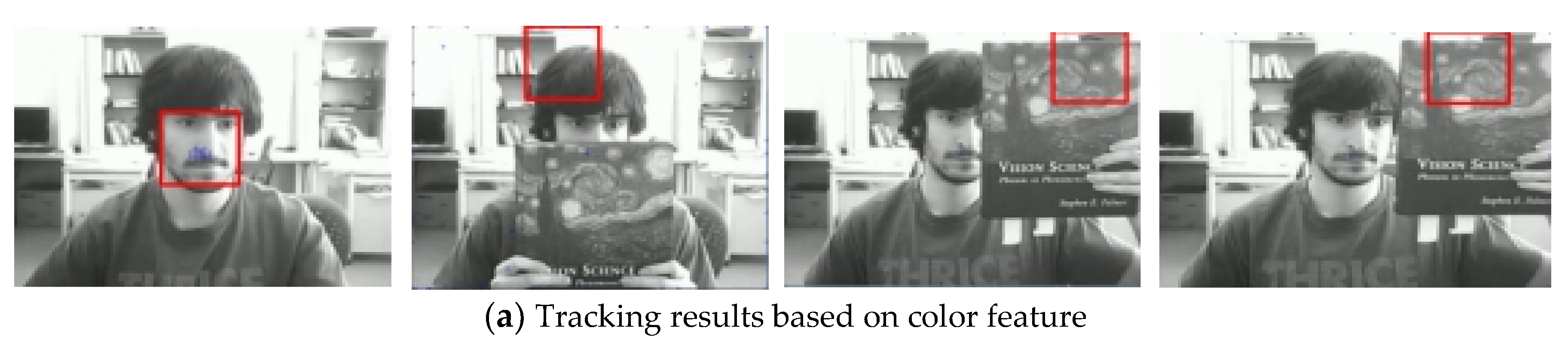
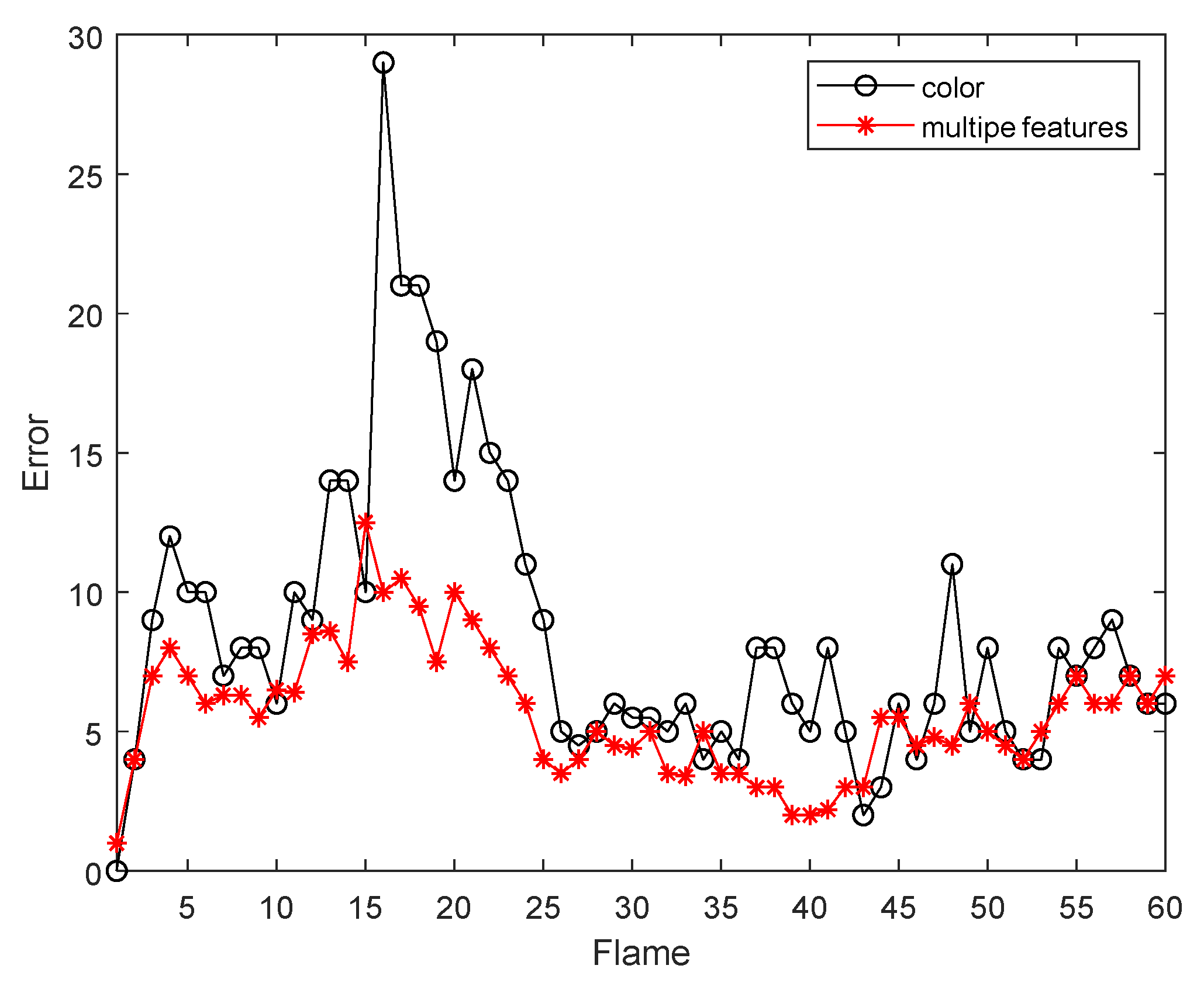
5.1. Tracking Effect and Error Analysis
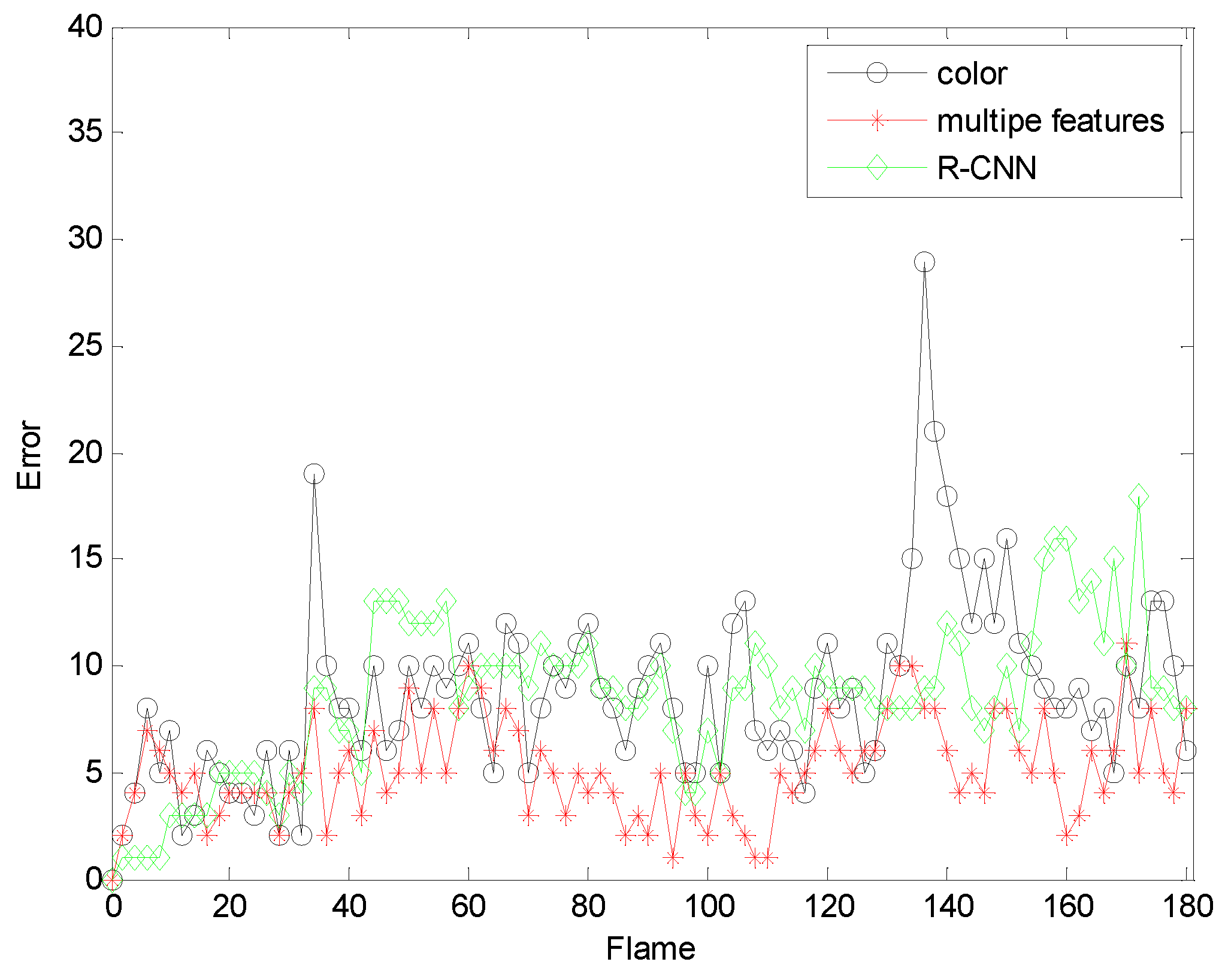
5.2. Comparison with Other Algorithms
5.3. Computational Efficiency
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liu, Y.; Nie, L.; Liu, L.; Rosenblum, D.S. From action to activity: Sensor-based activity recognition. Neurocomputing 2016, 181, 108–115. [Google Scholar] [CrossRef]
- Lu, L.; Zhang, J.; Jing, X.; Khan, M.K.; Alghathbar, K. Dynamic weighted discrimination power analysis in DCT domain for face and palmprint recognition. In Proceedings of the 2010 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 17–19 November 2010; Volume 34, pp. 44–48. [Google Scholar]
- Liu, Y.; Zheng, Y.; Liang, Y.; Liu, S.; David, S. UrbanWater Quality Prediction based on Multi-task Multi-view Learning. In Proceedings of the 25th International Joint Conference on Artificial Intelligence, New York, NY, USA, 9–15 July 2016; Volume 34, pp. 44–48. [Google Scholar]
- Lee, J.; Park, G.Y.; Kwak, H.Y. Two-directional two-dimensional random projection and its variations for face and palmprint recognition. In Proceedings of the ICCSA 2011: International Conference on Computational Science and Its Applications, Santander, Spain, 20–23 June 2011; Volume 32, pp. 707–727. [Google Scholar]
- Leng, L.; Li, M.; Kim, C.; Bi, X. Dual-source discrimination power analysis for multi-instance contactless. Multimed. Tools Appl. 2015, 76, 333–345. [Google Scholar] [CrossRef]
- Leng, L.; Li, M.; Leng, L.; Teoh, A.B.J. Conjugate 2DPalmHash code for secure palm-print-vein verification. In Proceedings of the 2013 6th International Congress on Image and Signal Processing (CISP), Hangzhou, China, 16–18 December 2013; Volume 70, pp. 495–523. [Google Scholar]
- Yoon, J.H.; Yang, M.H.; Lim, J.; Yoon, K.J. Bayesian multi-object tracking using motion context from multiple objects. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 5–9 January 2015; pp. 33–40. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina at Chapel Hill: Chapel Hill, NC, USA, 2017; Volume 8, pp. 127–132. [Google Scholar]
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P.J. Particle filters for positioning, navigation, and tracking. IEEE Trans. Signal Process. 2002, 50, 425–437. [Google Scholar] [CrossRef]
- Sadeghian, A.; Alahi, A.; Savarese, S. Tracking the Untrackable: Learning to Track Multiple Cues with Long-Term Dependencies. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 24–30 July 2017. [Google Scholar]
- Lin, Y.; Shen, J.; Cheng, S.; Pantic, M. Mobile Face Tracking: A Survey and Benchmark. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Jiang, X.; Yu, H.; Lu, Y.; Liu, H. A fusion method for robust face tracking. Multimed. Tools Appl. 2016, 75, 11801–11813. [Google Scholar] [CrossRef]
- Wang, L.; Yan, H.; Lv, K.; Pan, C. Visual Tracking via Kernel Sparse Representation with Multikernel Fusion. IEEE Trans. Circuits Syst. Video Technol. 2014, 24, 1132–1141. [Google Scholar]
- Li, X.; Dick, A.; Shen, C.; Zhang, Z.; Hengel, A.V.D.; Wang, H. Visual tracking with spatio-temporal Dempster-Shafer information fusion. IEEE Trans. Image Process. 2013, 22, 3028–3040. [Google Scholar] [CrossRef] [PubMed]
- Yang, D.; Zhang, Y.; Ji, R.; Li, Y.; Huangfu, L.; Yang, Y. An Improved Spatial Histogram and Particle Filter Face Tracking. In Genetic and Evolutionary Computing, Advances in Intelligent Systems and Computing; Spinger: Beijing, China, 2015; Volume 329, pp. 257–267. [Google Scholar]
- Li, Y.; Wang, G.; Nie, L.; Wang, Q. Distance Metric Optimization Driven Convolutional Neural Network for Age Invariant Face Recognition. Pattern Recognit. 2018, 75, 51–62. [Google Scholar] [CrossRef]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for on-line non-linear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Dou, J.; Li, J.; Zhang, Z.; Han, S. Face tracking with an adaptive adaboost-based particle filter. In Proceedings of the 24th IEEE Chinese Control and Decision Conference (CCDC), Taiyuan, China, 23–25 May 2012; pp. 3626–3631. [Google Scholar]
- Bos, R.; De Waele, S.; Broersen, P.M.T. Autoregressive spectral estimation by application of the burg algorithm to irregularly sampled data. IEEE Trans. Instrum. Meas. 2002, 51, 1289–1294. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, Y.X.; Tang, C.H. Face tracking based on particle filter using color histogram and contour distributions. Opto-Electron. Eng. 2012, 39, 32–39. [Google Scholar]
- Swain, M.J.; Ballard, D.H. Color indexing. Int. J. Comput. Vis. 1991, 7, 11–32. [Google Scholar] [CrossRef]
- Comaniciu, D.; Ramesh, V.; Meer, P. Kernel-based object tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 564–575. [Google Scholar] [CrossRef]
- Kailath, T. The Divergence and Bhattacharyya Distance Measures in Signal Selection. IEEE Trans. Commun. Technol. 1967, 15, 52–60. [Google Scholar] [CrossRef]
- Zhu, W.; Levinson, S. Edge Orientation-Based Multi-View Object Recognition. In Proceedings of the 15th International Conference on Pattern Recognition (ICPR), Barcelona, Spain, 3–7 September 2000; pp. 936–939. [Google Scholar]
- Sobel, I. An Isotropic 3 × 3 Gradient Operator, Machine Vision for Three—Dimensional Scenes; Freeman, H., Ed.; Academic Press: New York, NY, USA, 1990; pp. 376–379. [Google Scholar]
- Wang, J.; Yagi, Y. Integrating color and shape-texture features for adaptive real-time object tracking. IEEE Trans. Image Process. 2008, 17, 235–240. [Google Scholar] [CrossRef] [PubMed]
- Visual Tracker Benchmark. Available online: http://cvlab.hanyang.ac.kr/tracker_benchmark/datasets.html (accessed on 10 March 2019).



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | Frame Size | Sequence Characteristics | Total Frames |
|---|---|---|---|
| Test 1 | 480 × 360 | Illumination variation | 182 |
| Test 2 | 480 × 360 | Similar background | 119 |
| Test 3 | 480 × 360 | Object scaling | 198 |
| Test 4 | 480×360 | Object rotation | 45 |
| Test 5 | 480 × 360 | Occlusion | 310 |
| Test 6 | 480 × 360 | High speed operation and lens stretching | 180 |
| Test 7 | 480 × 360 | Light change | 60 |
| Particle Number | Time/s | |
|---|---|---|
| Normal Histogram | Integral Histogram | |
| 20 | 0.028987 | 0.050296 |
| 50 | 0.085672 | 0.054322 |
| 100 | 0.148562 | 0.058970 |
| 500 | 0.765326 | 0.063952 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Wang, W.; Liu, H.; Li, T. Research on a Face Real-time Tracking Algorithm Based on Particle Filter Multi-Feature Fusion. Sensors 2019, 19, 1245. https://doi.org/10.3390/s19051245
Wang T, Wang W, Liu H, Li T. Research on a Face Real-time Tracking Algorithm Based on Particle Filter Multi-Feature Fusion. Sensors. 2019; 19(5):1245. https://doi.org/10.3390/s19051245
Chicago/Turabian StyleWang, Tao, Wen Wang, Hui Liu, and Tianping Li. 2019. "Research on a Face Real-time Tracking Algorithm Based on Particle Filter Multi-Feature Fusion" Sensors 19, no. 5: 1245. https://doi.org/10.3390/s19051245
APA StyleWang, T., Wang, W., Liu, H., & Li, T. (2019). Research on a Face Real-time Tracking Algorithm Based on Particle Filter Multi-Feature Fusion. Sensors, 19(5), 1245. https://doi.org/10.3390/s19051245