Intersection-Based Link-Adaptive Beaconless Forwarding in Urban Vehicular Ad-Hoc Networks



Abstract
1. Introduction
- A novel receiver-based data forwarding protocol called intersection-based link-adaptive beaconless forwarding for city scenarios (ILBFC) is proposed. ILBFC exploits geographic information of road intersections in limiting the duration for which a relay vehicle stays as a default forwarder. Also, the maximum duration for which a relay vehicle can be a default forwarder is fixed based on the maximum road length between the two road intersections.
- An urban road traffic adaptive winner relay management scheme is employed, where the relay vehicle when acting as default forwarder decides on every data packet reception whether or not to continue as default forwarder. The decision is based on the relative geographic progress of current and previous relay vehicles towards destination. This is done with the aim to take into account the drastic decay in the speed of vehicles due to the road intersections and traffic signals encountered in urban VANETs.
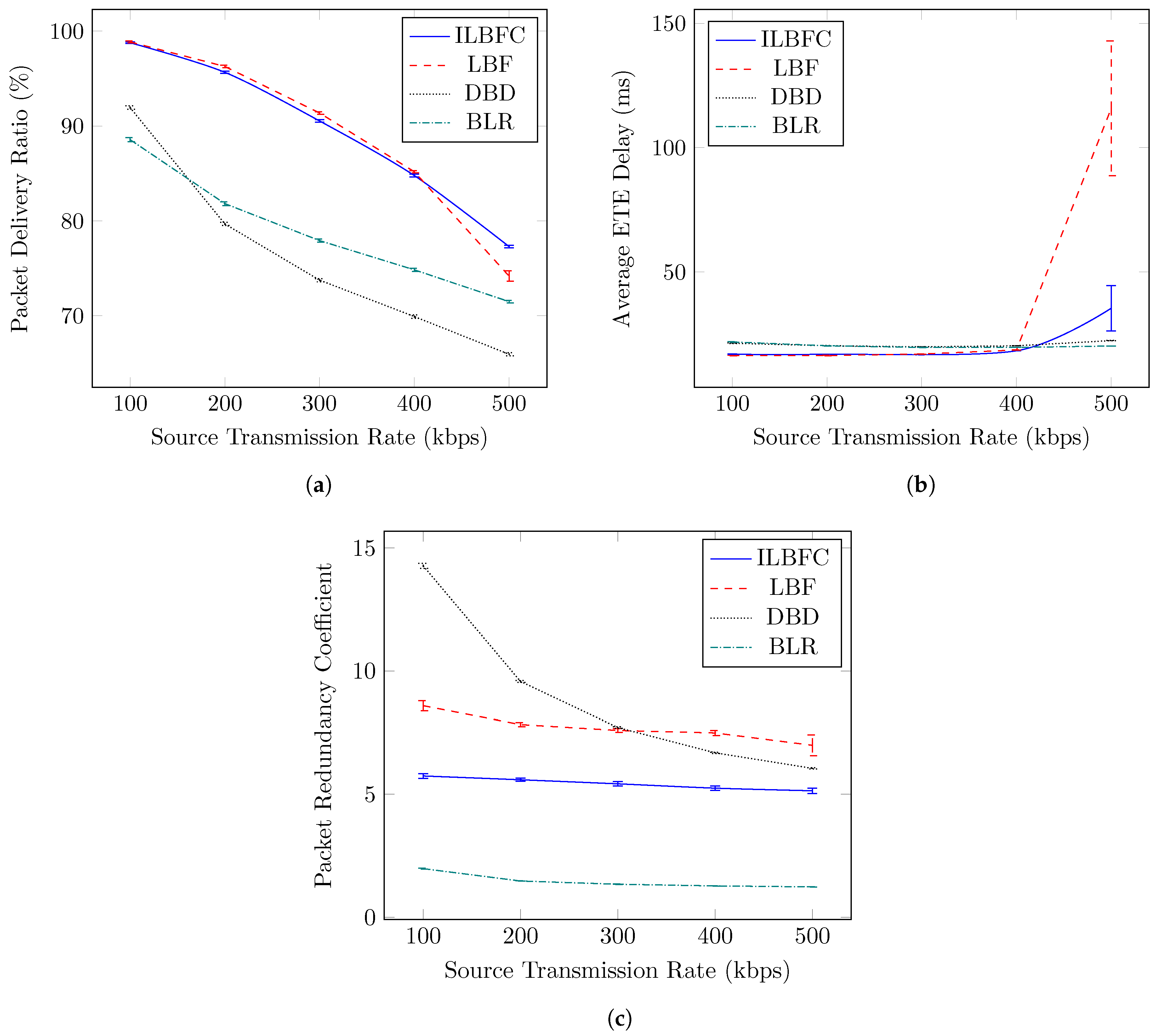
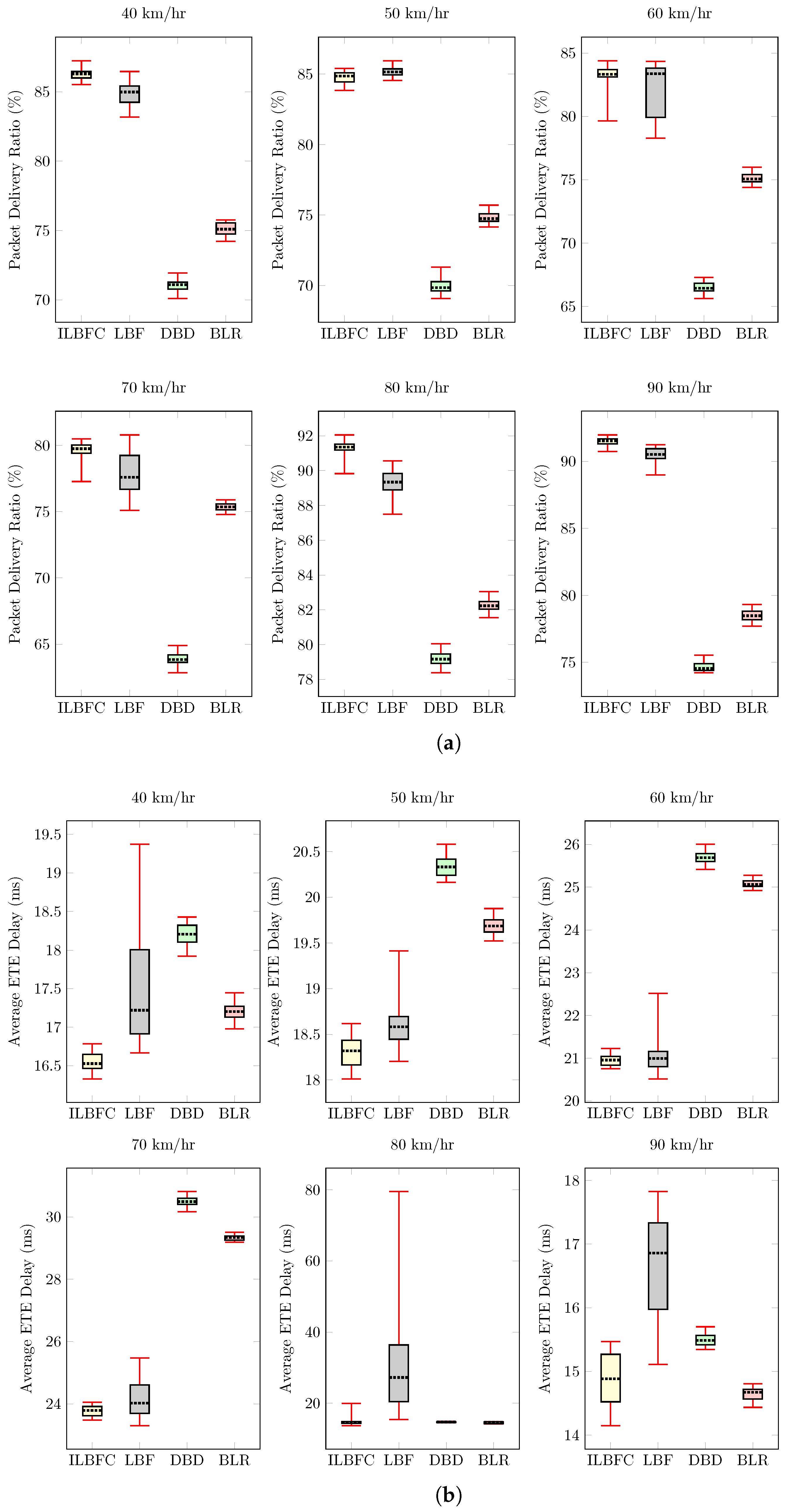
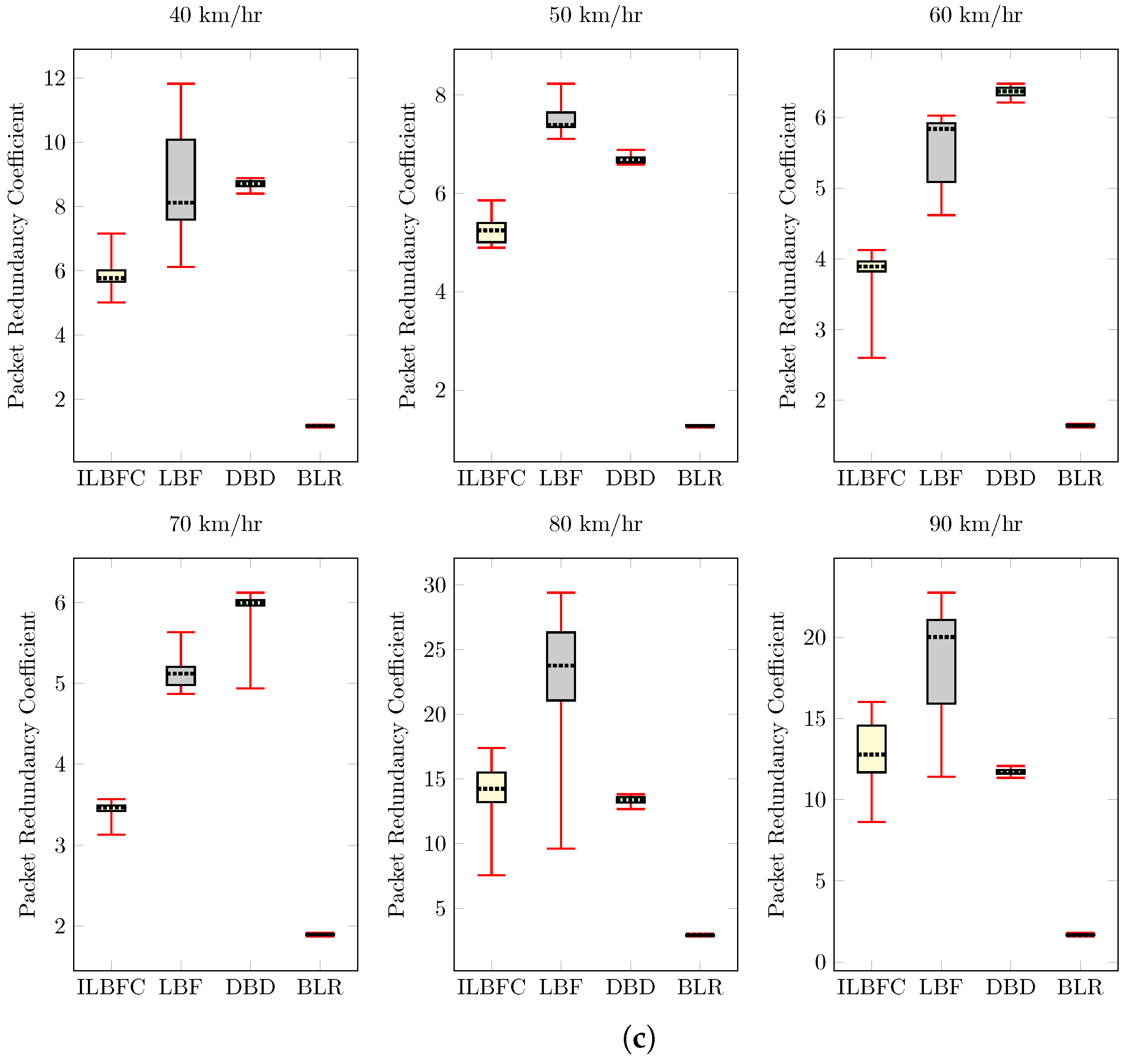
- The proposed ILBFC is then simulated in realistic traffic conditions and its performance is compared with other existing state-of-the-art routing protocols. The comparison is done in terms of three performance metrics: packet delivery ratio (PDR), average ETE delay, and a new metric called packet redundancy coefficient (PRC), where PRC gives a measure of routing protocol’s ability to disseminate the data packet in unicast fashion.
2. Background
2.1. Remote Monitoring Applications in VANETs
2.1.1. Emergency Telemedicine
2.1.2. Commercial Driver Safety
2.1.3. Mobile Surveillance
2.2. Specific Characteristics of Remote Monitoring in Urban VANETs
2.2.1. Urban Environment Constraints
2.2.2. Data Rate Requirement
2.3. Routing in VANETs
2.3.1. Classification
2.3.2. Challenges
2.4. Receiver-Based Data Forwarding
2.4.1. Basic Idea
2.4.2. Related Work
3. Intersection-Based Link-Adaptive Beaconless Forwarding for City Scenarios
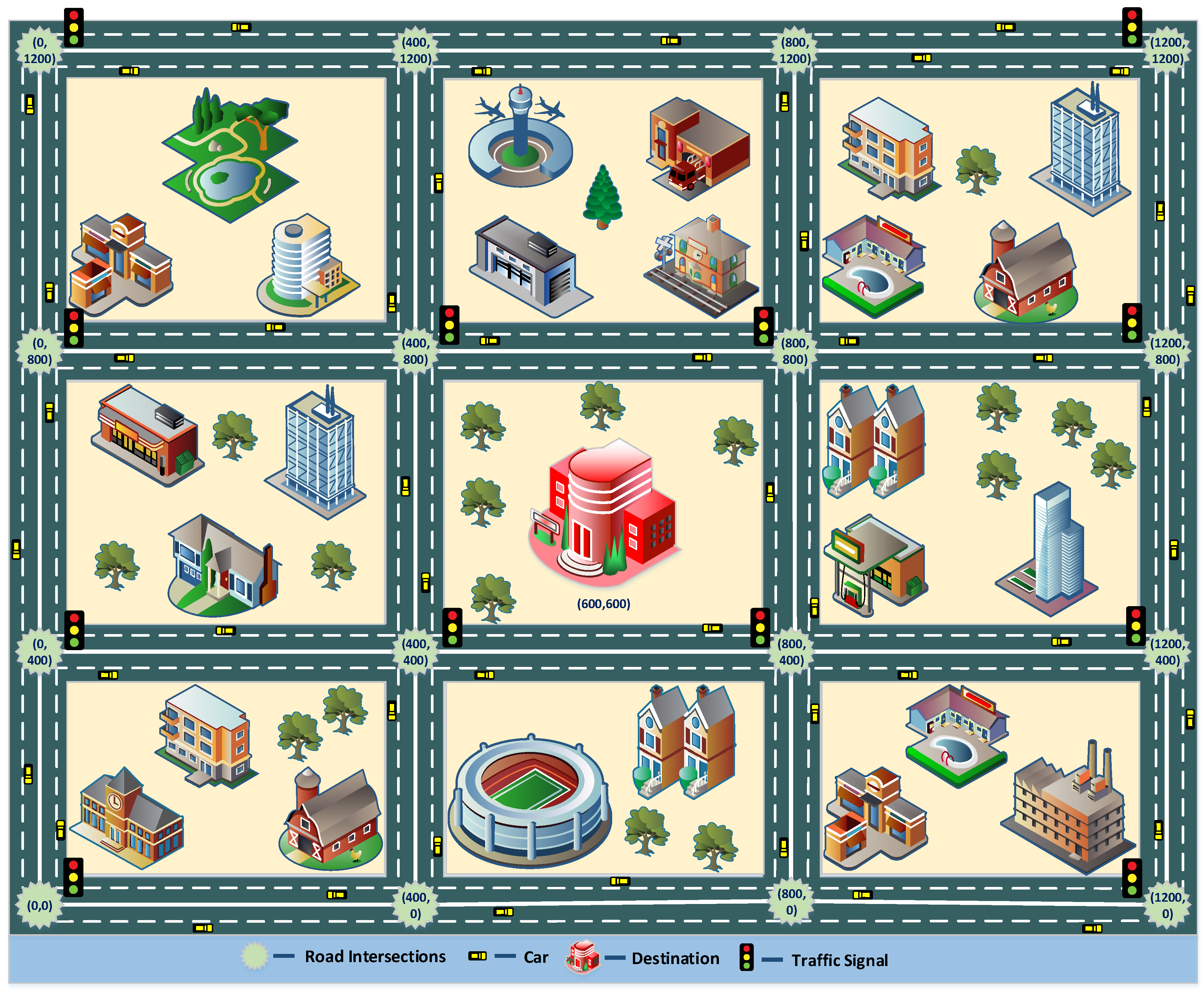
3.1. VANET Model
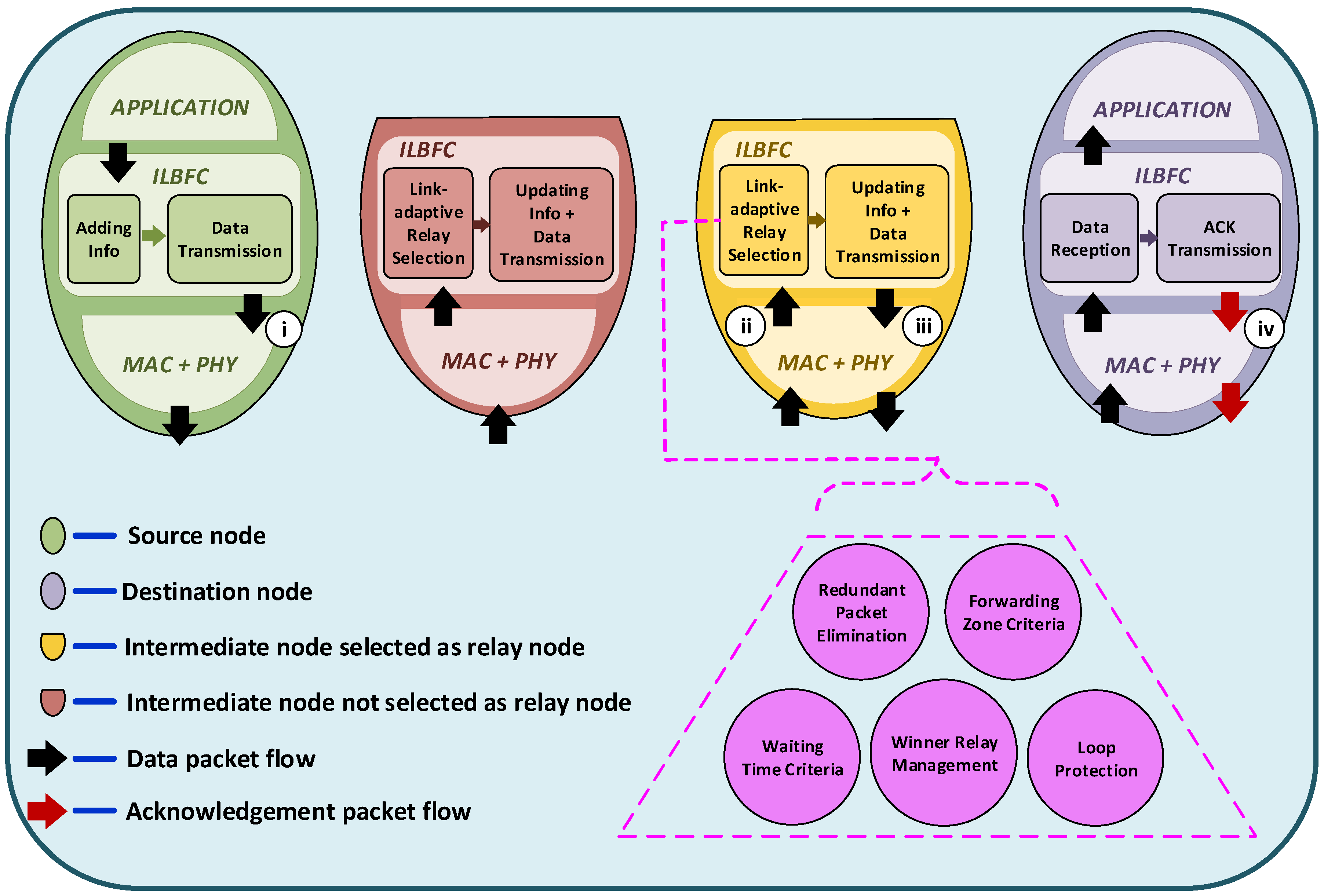
3.2. Routing Protocol Design
3.2.1. Redundant Packet Elimination
3.2.2. Forwarding Zone
3.2.3. Waiting Time Criteria
3.2.4. Winner Relay Management
3.2.5. Loop Protection
4. Performance Analysis
4.1. Scenario Setup and Performance Metrics
4.2. Protocol Specification
4.2.1. Link-Adaptive Beaconless Forwarding
4.2.2. Distributed Beaconless Dissemination
4.2.3. Beacon-Less Routing
4.3. Simulation Results
4.3.1. Source Transmission Rate Variation
4.3.2. Node Density Variation
4.3.3. Maximum Node Velocity Variation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Eze, E.C.; Zhang, S.; Liu, E. Vehicular ad hoc networks (VANETs): Current state, challenges, potentials and way forward. In Proceedings of the 20th International Conference on Automation and Computing, Bedfordshire, UK, 12–13 September 2014; pp. 176–181. [Google Scholar]
- Liang, W.; Li, Z.; Zhang, H.; Wang, S.; Bie, R. Vehicular Ad Hoc Networks: Architectures, Research Issues, Methodologies, Challenges, and Trends. Int. J. Distrib. Sens. Netw. 2015, 11, 1–11. [Google Scholar] [CrossRef]
- Uzcategui, R.A.; Sucre, A.J.D.; Acosta-Marum, G. Wave: A tutorial. IEEE Commun. Mag. 2009, 47, 126–133. [Google Scholar] [CrossRef]
- IEEE Standard for Information Technology—Telecommunications and Information Exchange Between Systems—Local and Metropolitan Area Networks—Specific Requirement—Part II: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. IEEE Std 802.11-2007 (Revision of IEEE Std 802.11-1999). 2007, pp. 1–1076. Available online: https://ieeexplore.ieee.org/document/7786995 (accessed on 31 January 2019).
- Awang, A.; Husain, K.; Kamel, N.; Aissa, S. Routing in Vehicular Ad-hoc Networks: A Survey on Single- and Cross-Layer Design Techniques, and Perspectives. IEEE Access 2017, 5, 9497–9517. [Google Scholar] [CrossRef]
- Schoch, E.; Kargl, F.; Weber, M. Communication patterns in VANETs. IEEE Commun. Mag. 2008, 46, 119–125. [Google Scholar] [CrossRef]
- Nuri, M.D.; Nuri, H.H. Strategy for efficient routing in VANET. In Proceedings of the 2010 International Symposium on Information Technology, Kuala Lumpur, Malaysia, 15–17 June 2010; pp. 903–908. [Google Scholar]
- Härri, J.; Filali, F.; Bonnet, C. On Meaningful Parameters for Routing in VANETs Urban Environments under Realistic Mobility Patterns. In Proceedings of the IEEE Workshop Automotive Network Application (AutoNet), San Francisco, CA, USA, 1 December 2006. [Google Scholar]
- Kwatirayo, S.; Almhana, J.; Liu, Z. Adaptive Traffic Light Control using VANET: A case study. In Proceedings of the 9th International Wireless Communications and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013; pp. 752–757. [Google Scholar]
- Rezende, C.; Ramos, H.S.; Pazzi, R.W.; Boukerche, A.; Frery, A.C.; Loureiro, A.A.F. VIRTUS: A resilient location-aware video unicast scheme for vehicular networks. In Proceedings of the 2012 IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; pp. 698–702. [Google Scholar]
- Felice, M.D.; Cerqueira, E.; Melo, A.; Gerla, M.; Cuomo, F.; Baiocchi, A. A distributed beaconless routing protocol for real-time video dissemination in multimedia VANETs. Comput. Commun. 2015, 58, 40–52. [Google Scholar] [CrossRef]
- Abo-Zahhad, M.; Ahmed, S.M.; Elnahas, O. A Wireless Emergency Telemedicine System for Patients Monitoring and Diagnosis. Int. J. Telemed. Appl. 2014. [Google Scholar] [CrossRef] [PubMed]
- Pavlopoulos, S.; Kyriacou, E.; Berler, A.; Dembeyiotis, S.; Koutsouris, D. A novel emergency telemedicine system based on wireless communication technology-AMBULANCE. IEEE Trans. Inf. Technol. Biomed. 1998, 2, 261–267. [Google Scholar] [CrossRef]
- Antoniades, C.; Kouppis, A.; Pavlopoulos, S.; Kyriakou, E.; Kyprianou, A.; Andreou, A.; Pattichis, C.; Schizas, C. A novel telemedicine system for the handling of emergency cases. In Proceedings of the 5th World Conference on Injury Prevention and Control, New Delhi, India, 5–8 March 2000. [Google Scholar]
- Kyriacou, E.; Pavlopoulos, S.; Bourka, A.; Berler, A.; Koutsouris, D. Telemedicine in emergency care. In Proceedings of the 6th International Conference on Medical Physics, Patras, Greece, 1–4 September 1999; Volume 99, pp. 293–298. [Google Scholar]
- Liman, T.G.; Winter, B.; Waldschmidt, C.; Zerbe, N.; Hufnagl, P.; Audebert, H.J.; Endres, M. Telestroke Ambulances in Prehospital Stroke Management. Stroke 2012, 43, 2086–2090. [Google Scholar] [CrossRef]
- Gonzalez, E.; Peña, R.; Avila, A.; Vargas-Rosales, C.; Munoz-Rodriguez, D. A Systematic Review on Recent Advances in mHealth Systems: Deployment Architecture for Emergency Response. J. Healthc. Eng. 2017. [Google Scholar] [CrossRef]
- Kyriacou, E.; Panayides, A.; Constantinides, P. Chapter: mHealth eEmergency Systems. In Telehealth and Mobile Health; CRC Press: Boca Raton, FL, USA, 2016; pp. 203–230. [Google Scholar]
- Newnam, S.A.; Watson, B.C.; Murray, W. A comparison of the factors influencing the safety of work-related drivers in work and personal vehicles. In Proceedings of the 2002 Road Safety Research, Policing and Education Conference, Adelaide, Australia, 3–5 November 2002; pp. 488–495. [Google Scholar]
- SOCSO. Annual Report. 2014. Available online: https://www.perkeso.gov.my/index.php/en/report/annual-report (accessed on 31 January 2019).
- Parker, D.; Malone, C. Influencing driver attitudes and behaviour. In Proceedings of the SPE International Conference on Health, Safety, and Environment in Oil and Gas Exploration and Production, Calgary, AB, Canada, 29–31 March 2004. [Google Scholar]
- Rothe, J.P. Oil workers and seat-belt wearing behaviour: The northern Alberta context. Int. J. Circumpolar Health 2008, 67, 226–234. [Google Scholar] [CrossRef]
- Collingwood, V. Promoting the safe driving policy in NSW fleets of twenty or more vehicles. In Staysafe 36: Drivers as Workers, Vehicles as Workplaces: Issues in Fleet Management; Report No. 9/51, Ninth Report of the Joint Standing Committee on Road Safety of the 51st Parliament; Joint Standing Committee: Sydney, Australia, 1997. [Google Scholar]
- Masters, A. Occupational road safety: The perspective of the driver trainer industry. In Staysafe 36: Drivers as Workers, Vehicles as Workplaces: Issues in Fleet Management; Report No. 9/51, Ninth Report of the Joint Standing Committee on Road Safety of the 51st Parliament; Joint Standing Committee: Sydney, Australia, 1997. [Google Scholar]
- Skewes, D. Its just a company car: developing safer driving in the workplace. In Staysafe 36: Drivers as Workers, Vehicles as Workplaces: Issues in Fleet Management; Report No. 9/51, Ninth Report of the Joint Standing Committee on Road Safety of the 51st Parliament; Joint Standing Committee: Sydney, Australia, 1997. [Google Scholar]
- National Highway Traffic Safety Administration. Traffic Safety Facts-2006 Data; Department of Transportation, National Highway Traffic Safety Administration: Washington, DC, USA, 2007.
- Carter, N.; Ulfberg, J.; Nyström, B.; Edling, C. Sleep debt, sleepiness and accidents among males in the general population and male professional drivers. Accid. Anal. Prev. 2003, 35, 613–617. [Google Scholar] [CrossRef]
- Mohamed, N.; Mohd-Yusoff, M.F.; Othman, I.; Zulkipli, Z.H.; Osman, M.R.; Voon, W.S. Fatigue-related crashes involving express buses in Malaysia: Will the proposed policy of banning the early-hour operation reduce fatigue-related crashes and benefit overall road safety? Accid. Anal. Prev. 2012, 45, 45–49. [Google Scholar] [CrossRef] [PubMed]
- Omidyeganeh, M.; Shirmohammadi, S.; Abtahi, S.; Khurshid, A.; Farhan, M.; Scharcanski, J.; Hariri, B.; Laroche, D.; Martel, L. Yawning Detection Using Embedded Smart Cameras. IEEE Trans. Instrum. Meas. 2016, 65, 570–582. [Google Scholar] [CrossRef]
- Smith, P.; Shah, M.; da Vitoria Lobo, N. Determining driver visual attention with one camera. IEEE Trans. Intell. Transp. Syst. 2003, 4, 205–218. [Google Scholar] [CrossRef]
- Kondyli, A.; Sisiopiku, V.P.; Zhao, L.; Barmpoutis, A. Computer Assisted Analysis of Drivers’ Body Activity Using a Range Camera. IEEE Intell. Transp. Syst. Mag. 2015, 7, 18–28. [Google Scholar] [CrossRef]
- Aliyu, A.; Abdullah, A.H.; Kaiwartya, O.; Cao, Y.; Lloret, J.; Aslam, N.; Joda, U.M. Towards video streaming in IoT Environments: Vehicular communication perspective. Comput. Commun. 2018, 118, 93–119. [Google Scholar] [CrossRef]
- Jian, W.; Qimei, C.; De, Z.; Houjie, B. Embedded Wireless Video Surveillance System for Vehicle. In Proceedings of the 6th International Conference on ITS Telecommunications, Chengdu, China, 21–23 June 2006; pp. 1141–1144. [Google Scholar]
- Bellalta, B.; Belyaev, E.; Jonsson, M.; Vinel, A. Performance Evaluation of IEEE 802.11p-Enabled Vehicular Video Surveillance System. IEEE Commun. Lett. 2014, 18, 708–711. [Google Scholar] [CrossRef]
- Chandy, D.; Soto, A.; Huerta, M.; Bermeo, J.P.; Clotet, R.; Sagbay, G.; Avila, R. Evaluation of QoS in data mobile network for vital signs transmission. In Proceedings of the 2016 IEEE Healthcare Innovation Point-Of-Care Technologies Conference (HI-POCT), Cancun, Mexico, 9–11 November 2016; pp. 146–149. [Google Scholar]
- Reyes-Muñoz, A.; Domingo, M.C.; López-Trinidad, M.A.; Delgado, J.L. Integration of Body Sensor Networks and Vehicular Ad-hoc Networks for Traffic Safety. Sensors 2016, 16, 107. [Google Scholar] [CrossRef] [PubMed]
- Zvikhachevskaya, A.; Markarian, G.; Mihailova, L. Quality of Service Consideration for the Wireless Telemedicine and E-Health Services. In Proceedings of the 2009 IEEE Wireless Communications and Networking Conference, Budapest, Hungary, 5–8 April 2009; pp. 1–6. [Google Scholar]
- Liu, H.; El Zarki, M. Transmission of video telephony images over wireless channels. Wirel. Netw. 1996, 2, 219–228. [Google Scholar] [CrossRef]
- Xie, F.; Hua, K.A.; Wang, W.; Ho, Y.H. Performance Study of Live Video Streaming Over Highway Vehicular Ad Hoc Networks. In Proceedings of the IEEE 66th Vehicular Technology Conference, Baltimore, MD, USA, 30 September–3 October 2007; pp. 2121–2125. [Google Scholar]
- Torres, A.; Calafate, C.T.; Cano, J.C.; Manzoni, P.; Ji, Y. Evaluation of flooding schemes for real-time video transmission in VANETs. Ad Hoc Netw. 2015, 24, 3–20. [Google Scholar] [CrossRef]
- Rene, S.; Ganan, C.; Caubet, J.; Alins, J.; Mata, J.; Munoz, J.L. Analysis of video streaming performance in vehicular networks. In Proceedings of the INFOCOMP 2011: The First International Conference on Advanced Communications and Computation, Barcelona, Spain, 23–29 October 2011; pp. 92–97. [Google Scholar]
- Li, F.; Wang, Y. Routing in vehicular ad hoc networks: A survey. IEEE Veh. Technol. Mag. 2007, 2, 12–22. [Google Scholar] [CrossRef]
- Sharef, B.T.; Alsaqour, R.A.; Ismail, M. Vehicular communication ad hoc routing protocols: A survey. J. Netw. Comput. Appl. 2014, 40, 363–396. [Google Scholar] [CrossRef]
- Ros, F.J.; Cabrera, V.; Sanchez, J.A.; Martinez, J.A.; Ruiz, P.M. Routing in Vehicular Networks. In Vehicular Networks: Techniques, Standards, and Applications; Auerbach Publications: Boston, MA, USA, 2009; pp. 109–141. [Google Scholar]
- Wang, R.; Rezende, C.; Ramos, H.S.; Pazzi, R.W.; Boukerche, A.; Loureiro, A.A.F. LIAITHON: A location-aware multipath video streaming scheme for urban vehicular networks. In Proceedings of the 2012 IEEE Symposium on Computers and Communications (ISCC), Cappadocia, Turkey, 1–4 July 2012; pp. 436–441. [Google Scholar]
- Husain, K.; Awang, A. A Receiver-Based Forwarding Scheme to Minimize Multipath Formation in VANET. In Vehicular Ad-Hoc Networks for Smart Cities; Laouiti, A., Qayyum, A., Mohamad Saad, M.N., Eds.; Springer: Singapore, 2017; pp. 15–26. [Google Scholar]
- Heissenbüttel, M.; Braun, T.; Bernoulli, T.; Wälchli, M. BLR: beacon-less routing algorithm for mobile ad hoc networks. Comput. Commun. 2004, 27, 1076–1086. [Google Scholar] [CrossRef]
- Wang, R.; Almulla, M.; Rezende, C.; Boukerche, A. Video streaming over vehicular networks by a multiple path solution with error correction. In Proceedings of the 2014 IEEE International Conference on Communications (ICC), Sydney, NSW, Australia, 10–14 June 2014; pp. 580–585. [Google Scholar]
- Lim, H.; Kim, C. Flooding in wireless ad hoc networks. Comput. Commun. 2001, 24, 353–363. [Google Scholar] [CrossRef]
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent Development and Applications of SUMO—Simulation of Urban MObility. Int. J. Adv. Syst. Meas. 2012, 5, 128–138. [Google Scholar]
- Simulator, Q.N. Scalable Network Technologies. Available online: web.scalable-networks.com/qualnet-network-simulator-software (accessed on 31 January 2019).
- Lan, K.C. MOVE: A practical simulator for mobility model in VANET. In Telematics Communication Technologies and Vehicular Networks; IGI Global: Hershey, PA, USA, 2009; pp. 355–368. [Google Scholar]
- Rappaport, T. Wireless Communications: Principles and Practice, 2nd ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Sommer, C.; Joerer, S.; Dressler, F. On the applicability of Two-Ray path loss models for vehicular network simulation. In Proceedings of the 2012 IEEE Vehicular Networking Conference (VNC), Seoul, Korea, 14–16 November 2012; pp. 64–69. [Google Scholar]
- Nazabal, J.A.; Falcone, F.; Fernández-Valdivielso, C.; Matías, I.R. Development of a Low Mobility IEEE 802.15.4 Compliant VANET System for Urban Environments. Sensors 2013, 13, 7065–7078. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Signal | Data Rate |
|---|---|---|
| Physiological [35,36] | ECG | 24–288 kbps |
| EEG | 43.2 kbps | |
| EMG | 320 kbps | |
| EOG | 1.2 kbps | |
| EDA | 1.2 kbps | |
| Heart Rate | 2–5 kbps | |
| Blood Pressure | 2–5 kbps | |
| Respiration | 800 bps | |
| Audio [35] | Voice | 4–25 kbps |
| Sound Diagnostic | 32–256 kbps | |
| Camera | Images [37] | 200 kbps |
| Video Telephony [38] | 32 kbps | |
| Video Streaming [39,40,41] | 100–500 kbps |
| Parameter | Value |
|---|---|
| Area | 1200 m × 1200 m |
| Simulation time | 300 s |
| Number of simulation runs | 30 |
| Transmission range | 450 m |
| Transmission power | 29.3 dBm |
| Channel frequency | 5.9 GHz |
| MAC, PHY parameters | IEEE 802.11p |
| Data traffic | CBR |
| Data packet size | 512 B |
| Buffer size | 51.2 kB |
| Nominal bandwidth | 27 Mbps |
| Antenna type | Omnidirectional |
| Antenna height | 1.895 m |
| 0.9691 dB | |
| 0.3 dB | |
| 0.2 dB | |
| Pathloss model | Two ray interference |
| Shadowing effect, | 4 dB |
| Receiver sensitivity | −71.65 dBm |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 50 ms | 3 | ||
| 50 ms | 6 | ||
| 0.5 | 10 ms |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Husain, K.; Awang, A.; Kamel, N.; Aïssa, S. Intersection-Based Link-Adaptive Beaconless Forwarding in Urban Vehicular Ad-Hoc Networks. Sensors 2019, 19, 1242. https://doi.org/10.3390/s19051242
Husain K, Awang A, Kamel N, Aïssa S. Intersection-Based Link-Adaptive Beaconless Forwarding in Urban Vehicular Ad-Hoc Networks. Sensors. 2019; 19(5):1242. https://doi.org/10.3390/s19051242
Chicago/Turabian StyleHusain, Khaleel, Azlan Awang, Nidal Kamel, and Sonia Aïssa. 2019. "Intersection-Based Link-Adaptive Beaconless Forwarding in Urban Vehicular Ad-Hoc Networks" Sensors 19, no. 5: 1242. https://doi.org/10.3390/s19051242
APA StyleHusain, K., Awang, A., Kamel, N., & Aïssa, S. (2019). Intersection-Based Link-Adaptive Beaconless Forwarding in Urban Vehicular Ad-Hoc Networks. Sensors, 19(5), 1242. https://doi.org/10.3390/s19051242