Change Detection in SAR Images Based on the ROF Model Semi-Implicit Denoising Method




Abstract
1. Introduction
2. The Proposed Algorithm
- use the ROF model semi-implicit denoising method to denoise SAR images T1 and T2;
- following denoising, obtain the difference images by the logarithmic ratio and mean ratio methods;
- using the PCA method, fuse the log ratio and mean ratio difference images to obtain the final difference image; and
- cluster the final difference image by fuzzy local information C-means clustering (FLICM) in order to obtain the change regions.
3. Algorithm Introduction
3.1. ROF Model Semi-Implicit Denoising
- establishment of the ROF model; and
- numerical discretization of the ROF model.
3.1.1. Establishment of the ROF Model
3.1.2. Numerical Discretization of the ROF Model
3.2. Generation of the Difference Images
3.3. Principal Component Analysis Fusion (PCA Fusion)
- For images to be fused, treat each image as a one-dimensional vector . Construct a data matrix from the images to be fused:
- Solve for the covariance matrix of :where is the variance , and is the average of the ith vector, that is, the average gray value of the ith image.
- Solve for the eigenvalues of the covariance matrix and the corresponding eigenvectors . Here, and the newly obtained feature vectors satisfy , where , and . At this time, are the principal components, and has the largest variance, which contains a large amount of important information about the difference graph.
- Determine the weight coefficient :
- Find the final fusion image :
3.4. Fuzzy Local Information C-Means Clustering (FLICM)
4. Experimental Study
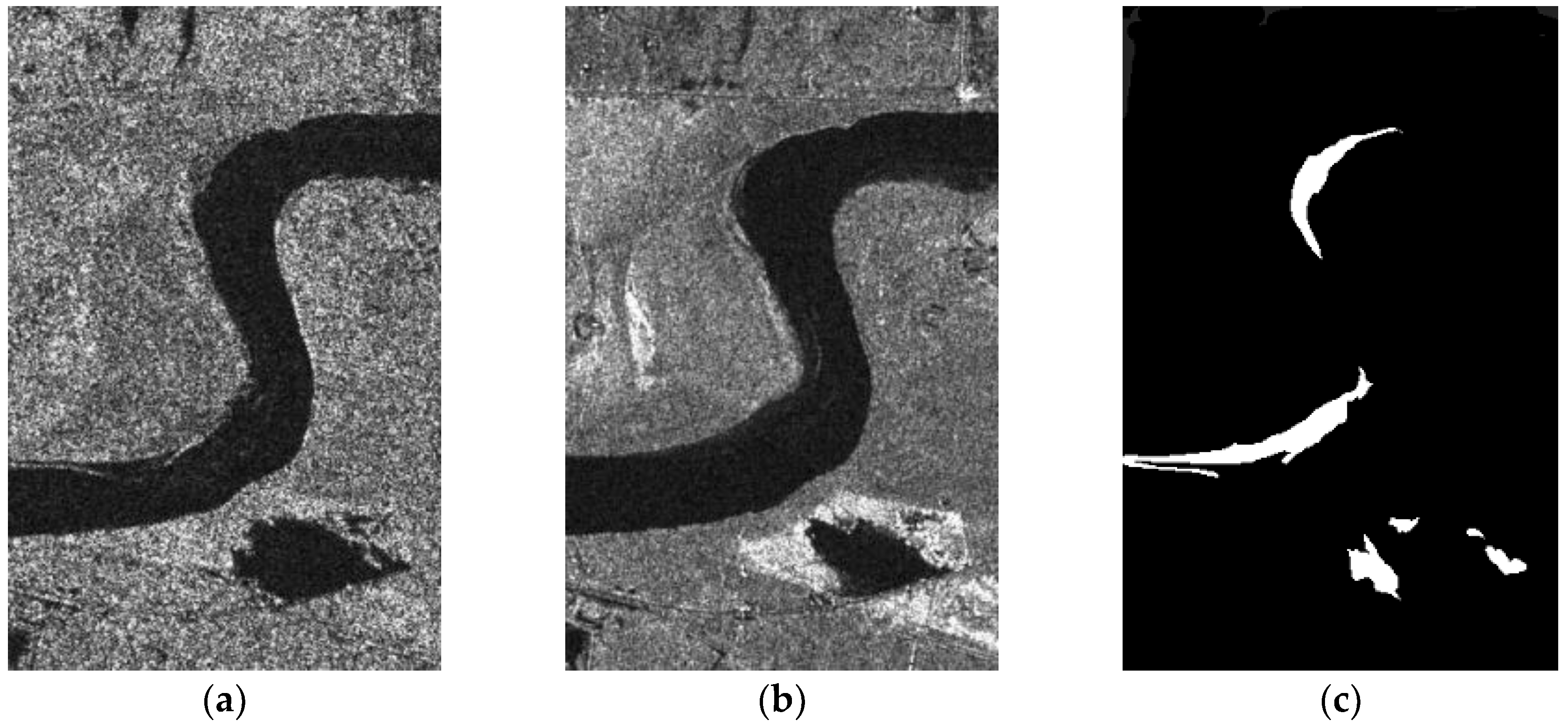
4.1. Description of the Experimental Data
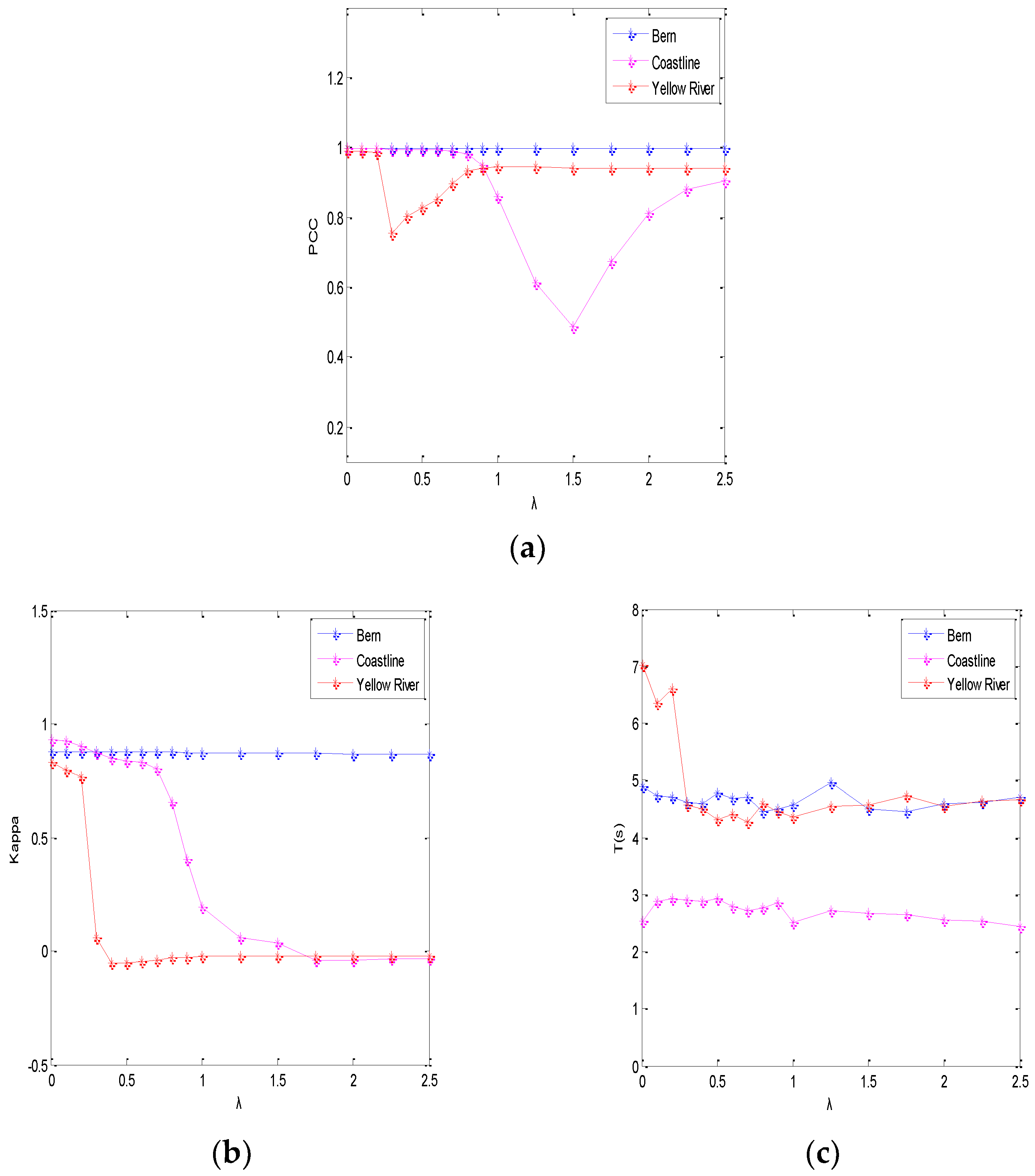
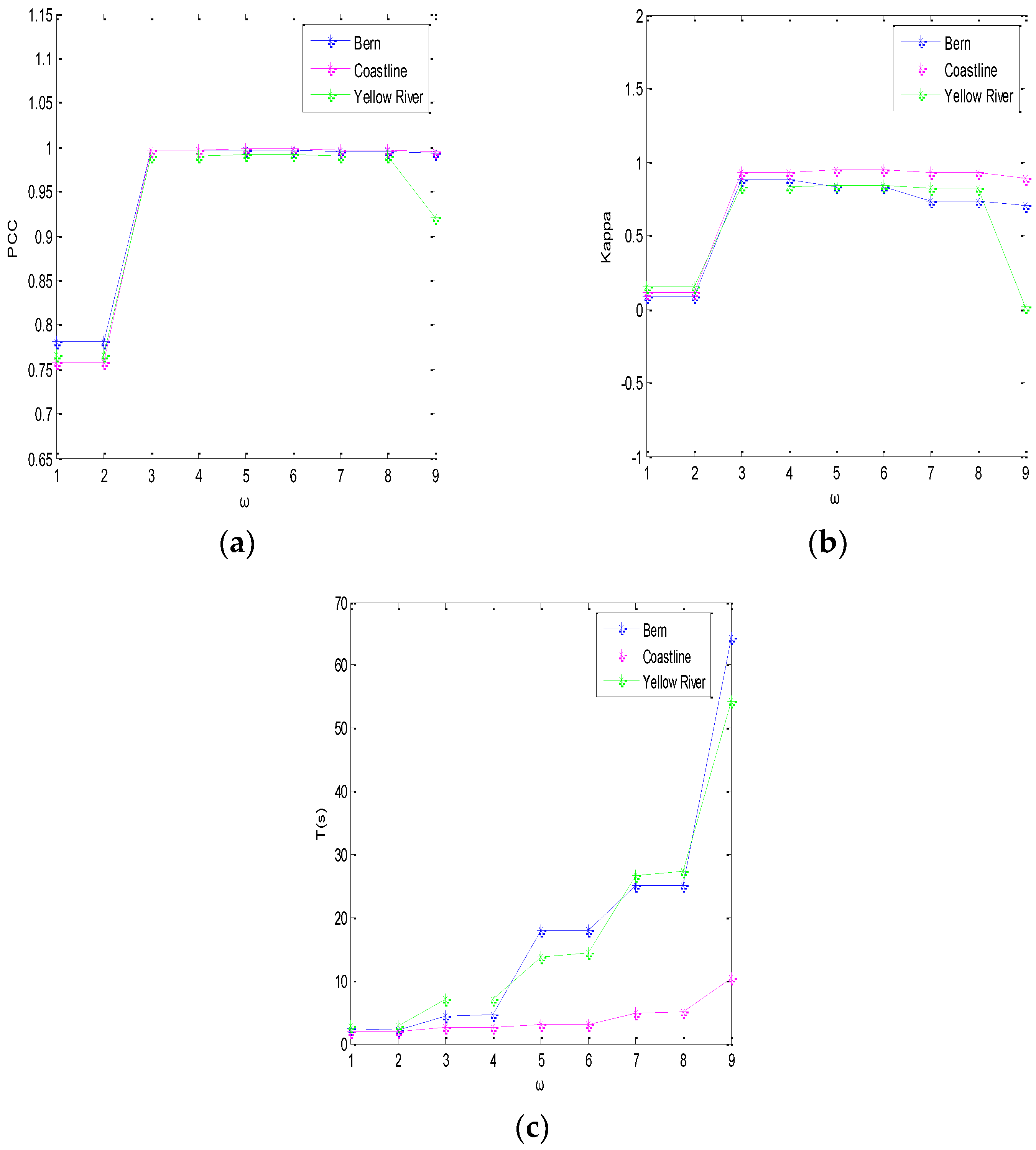
4.2. Experimental Parameters
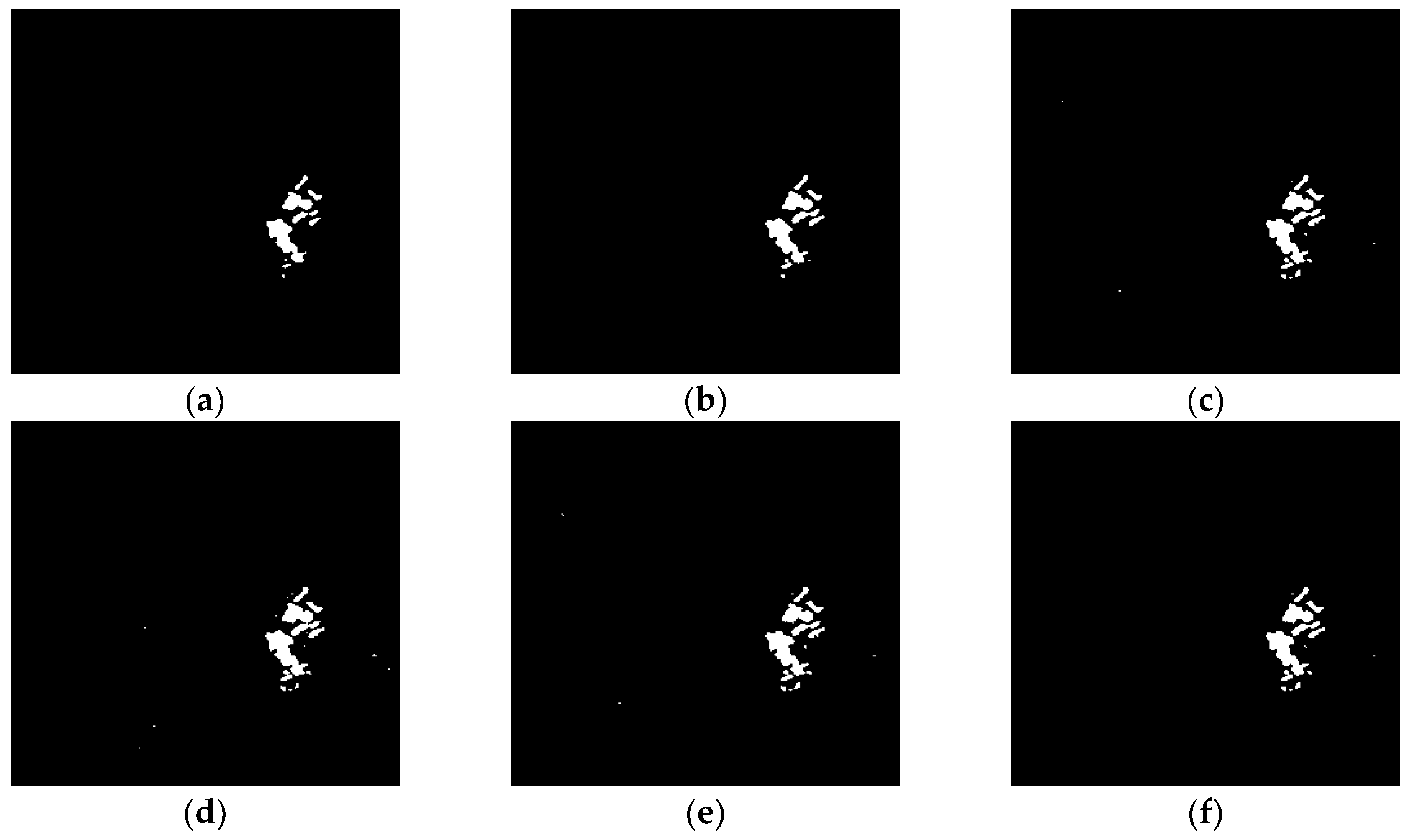
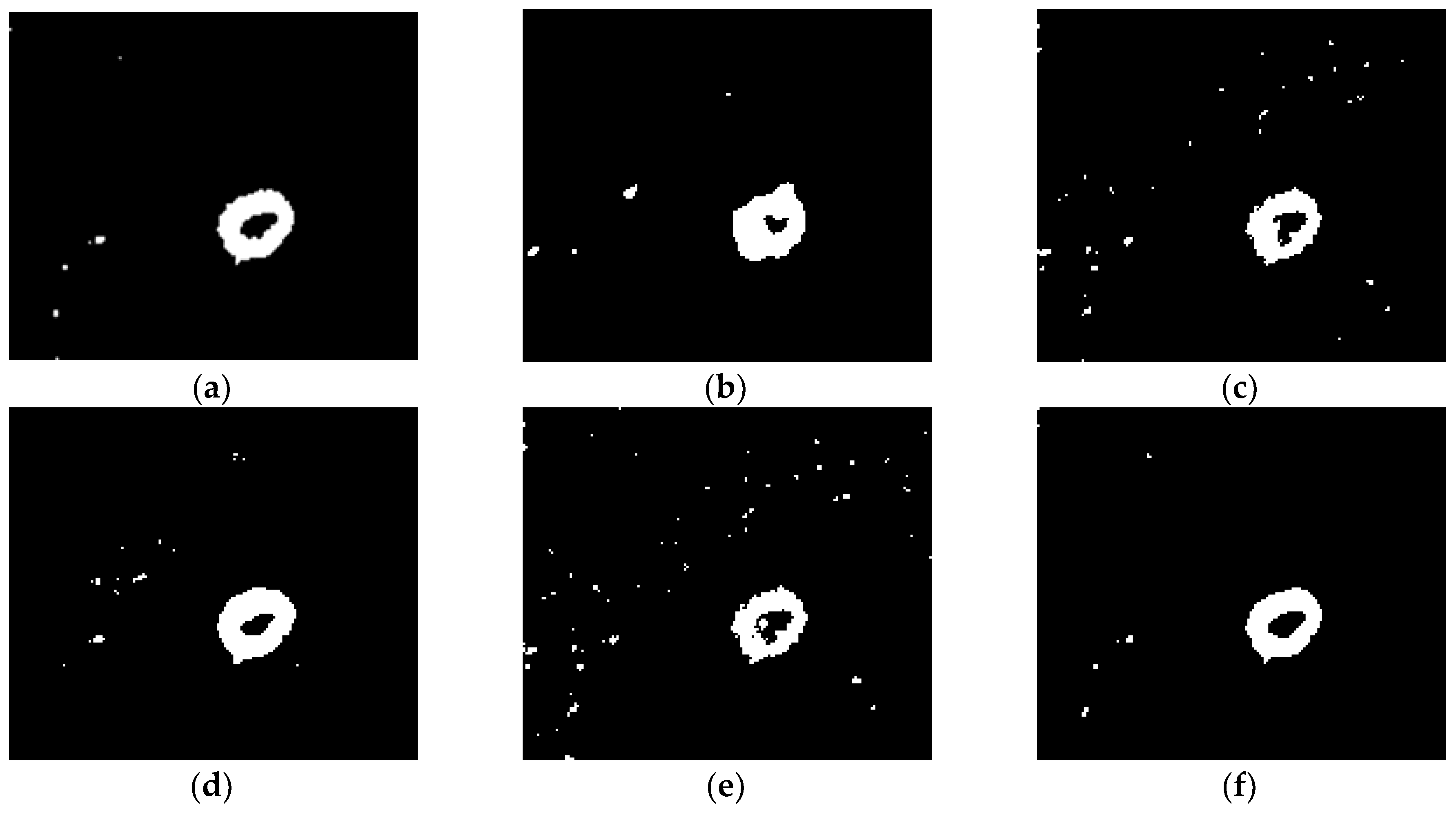
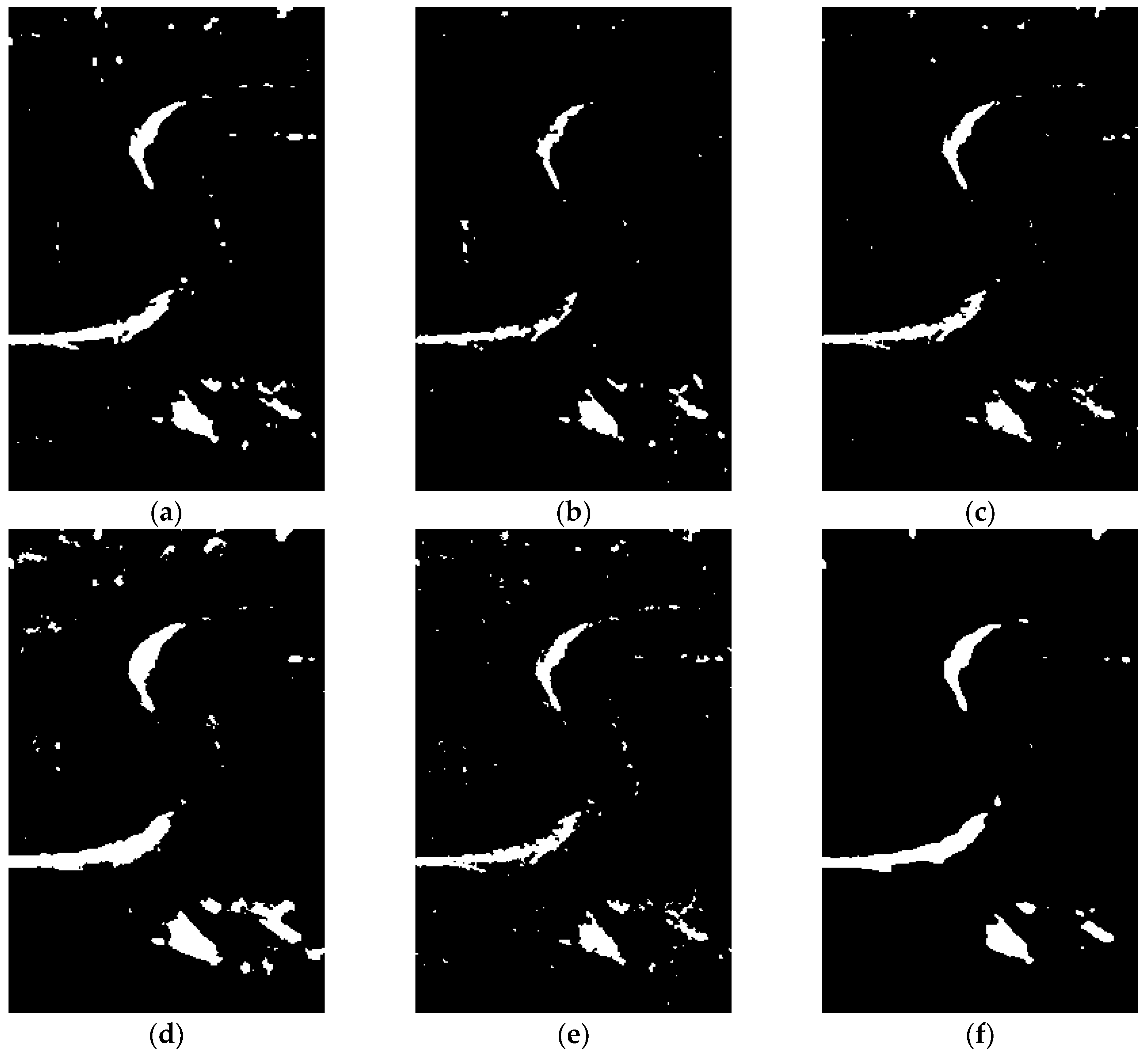
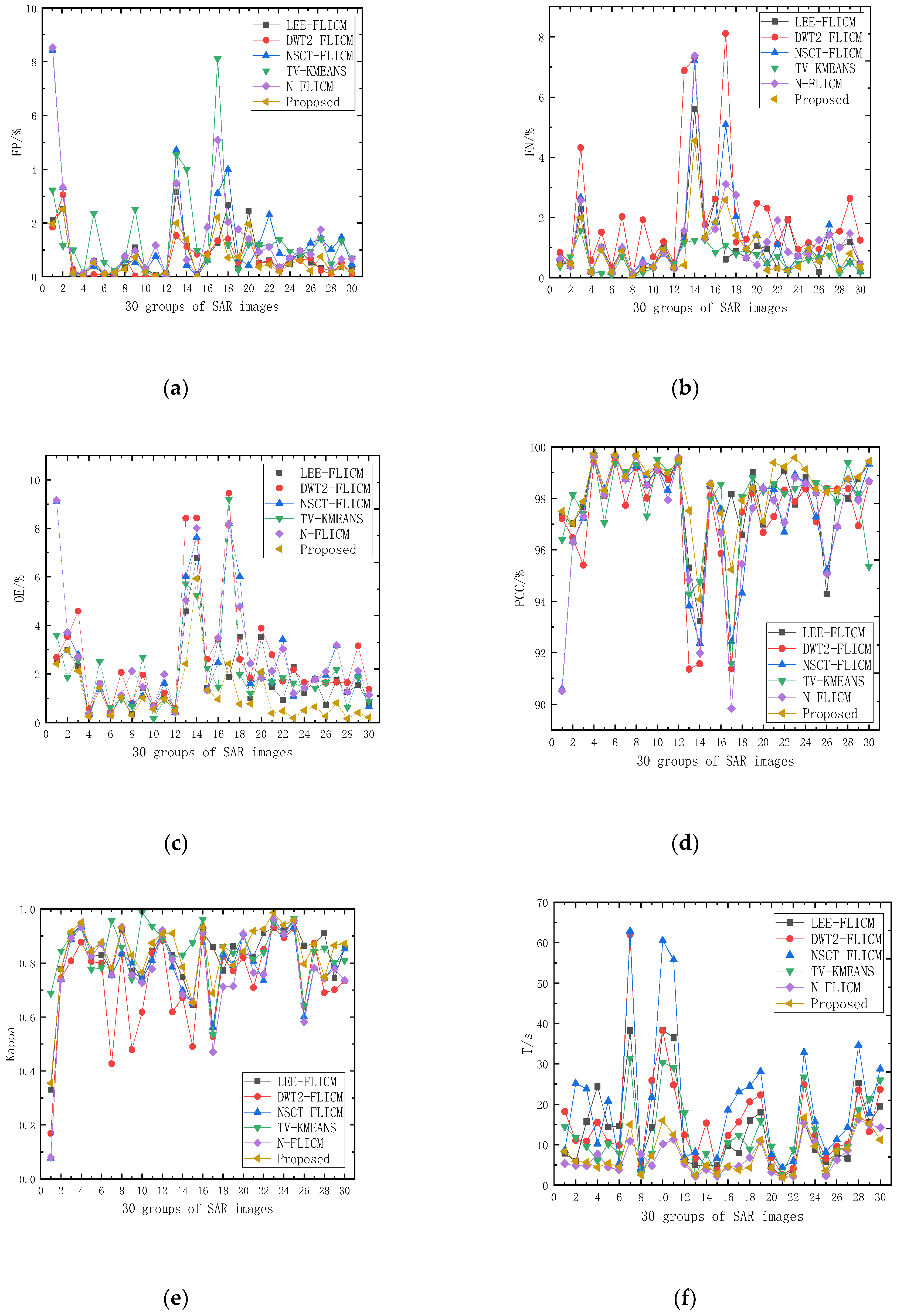
4.3. Experimental Results and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shang, R.; Qi, L.; Jiao, L.; Stolkin, R.; Li, Y. Change detection in SAR images by artificial immune multi-objective clustering. Eng. Appl. Artif. Intell. 2014, 31, 53–67. [Google Scholar] [CrossRef]
- Valenzuela, G.R. An asymptotic formulation for SAR images of the dynamical ocean surface. Radio Sci. 2016, 15, 105–114. [Google Scholar] [CrossRef]
- Bindschadler, R.A.; Jezek, K.C.; Crawford, J. Glaciological Investigations Using the Synthetic Aperture Radar Imaging System. Ann. Glaciol. 1987, 9, 11–19. [Google Scholar] [CrossRef]
- Yang, J.; Sun, W. Automatic analysis of the slight change image for unsupervised change detection. J. Appl. Remote Sens. 2015, 9, 095995. [Google Scholar] [CrossRef]
- Simard, M.; Degrandi, G.; Thomson, K.P.B.; Benie, G.B. Analysis of speckle noise contribution on wavelet decomposition of SAR images. IEEE Trans. Geosci. Remote Sens. 2002, 36, 1953–1962. [Google Scholar] [CrossRef]
- Yee, H.C.; Sjögreen, B. Non-Linear Filtering and Limiting in High Order Methods for Ideal and Non-Ideal MHD. J. Sci. Comput. 2006, 27, 507–521. [Google Scholar] [CrossRef]
- Chen, J.; Kang, X.; Liu, Y.; Wang, Z.J. Median Filtering Forensics Based on Convolutional Neural Networks. IEEE Signal Process. Lett. 2015, 22, 1849–1853. [Google Scholar] [CrossRef]
- Marks, L.D. Wiener-filter enhancement of noisy HREM images. Ultramicroscopy 2016, 62, 43–52. [Google Scholar] [CrossRef]
- Zhu, J.; Wen, J.; Zhang, Y. A new algorithm for SAR image despeckling using an enhanced Lee filter and median filter. In Proceedings of the International Congress on Image and Signal Processing, Hangzhou, China, 16–18 December 2013; pp. 224–228. [Google Scholar]
- Köstli, K.P.; Beard, P.C. Two-dimensional photoacoustic imaging by use of Fourier-transform image reconstruction and a detector with an anisotropic response. Appl. Opt. 2003, 42, 1899–1908. [Google Scholar] [CrossRef] [PubMed]
- Antonini, M.; Barlaud, M.; Mathieu, P.; Daubechies, I. Image coding using wavelet transform. IEEE Trans. Image Process. 1992, 1, 205–220. [Google Scholar] [CrossRef] [PubMed]
- Ikuta, C.; Zhang, S.; Uwate, Y.; Yang, G.; Nishio, Y. A novel fusion algorithm for visible and infrared image using non-subsampled contourlet transform and pulse-coupled neural network. In Proceedings of the International Conference on Computer Vision Theory and Applications, Lisbon, Portugal, 5–8 January 2015; pp. 160–164. [Google Scholar]
- Gong, M.; Yu, C.; Wu, Q. A Neighborhood-Based Ratio Approach for Change Detection in SAR Images. IEEE Geosci. Remote Sens. Lett. 2012, 9, 307–311. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Jia, Z.H.; Qin, X.Z.; Jie, Y.; Kasabov, N. Unsupervised detection of different SAR images based on improved NSCT domain image fusion algorithm. J. Optoelectron. Laser 2015, 26, 2023–2030. [Google Scholar]
- Rudin, L.I.; Osher, S.; Fatemi, E. Nonlinear total variation based noise removal algorithms. Phys. D Nonlinear Phenom. 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Lai, M.J.; Lucier, B.; Wang, J. The Convergence of a Central-Difference Discretization of Rudin-Osher-Fatemi Model for Image Denoising. In Proceedings of the International Conference on Scale Space and Variational Methods in Computer Vision, Voss, Norway, 1–5 June 2009; pp. 514–526. [Google Scholar]
- Cao, K.; Wang, F.; Shang, Q.-W. A Novel Image Denoising Algorithm Based on Crank-Nicholson Semi-implicit Difference Scheme. Procedia Eng. 2011, 23, 647–652. [Google Scholar]
- Wang, L.N.; He, W.Z.; Li, C.-L.; Liang, J. Image denoising algorithm based on wavelet transform and ROF model. Available online: http://en.cnki.com.cn/Article_en/CJFDTotal-TJJB201502011.htm (accessed on 7 March 2019).
- Wu, C.; Tai, X.C. Augmented Lagrangian Method, Dual Methods, and Split Bregman Iteration for ROF, Vectorial TV, and High Order Models. SIAM J. Imaging Sci. 2012, 3, 300–339. [Google Scholar] [CrossRef]
- Wang, X.; Jia, Z.; Yang, J.; Kasabov, N. Change detection in SAR images based on the logarithmic transformation and total variation denoising method. Remote Sens. Lett. 2017, 8, 214–223. [Google Scholar] [CrossRef]
- Shi, Y.-Y.; Liu, J.-J. A Semi-implicit Image Denoising Algorithm in Matrix Form. Available online: http://en.cnki.com.cn/Article_en/CJFDTOTAL-OXZG201204012.htm (accessed on 7 March 2019).
- Osher, S.; Solé, A.; Vese, L. Image decomposition and restoration using total variation minimization and the $Hsp {-1} $ norm. Available online: http://xueshu.baidu.com/usercenter/paper/show?paperid=0f0def36eb122397b8fd7c554e51a56f&site=xueshu_se&hitarticle=1&sc_from=xju (accessed on 7 March 2019).
- Weickert, J.; Romeny, B.M.t.H.; Viergever, M.A. Efficient and Reliable Schemes for Nonlinear Diffusion Filtering. IEEE Trans. Image Process. 1998, 7, 398–410. [Google Scholar] [CrossRef] [PubMed]
- Cross, G.W. Three types of matrix stability. Linear Algebra Appl. 1978, 20, 253–263. [Google Scholar] [CrossRef]
- Hou, B.; Wei, Q.; Zheng, Y.; Wang, S. Unsupervised Change Detection in SAR Image Based on Gauss-Log Ratio Image Fusion and Compressed Projection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3297–3317. [Google Scholar] [CrossRef]
- Chen, P.; Zhang, Y.; Jia, Z.; Yang, J.; Kasabov, N. Remote Sensing Image Change Detection Based on NSCT-HMT Model and Its Application. Sensors 2017, 17, 1295. [Google Scholar] [CrossRef] [PubMed]
- Prasath, V.B.S.; Vorotnikov, D. Weighted and well-balanced anisotropic diffusion scheme for image denoising and restoration. Nonlinear Anal. Real World Appl. 2014, 17, 33–46. [Google Scholar] [CrossRef]
- Wang, W.; Guyet, T.; Quiniou, R.; Cordier, M.O.; Masseglia, F.; Zhang, X. Autonomic intrusion detection: Adaptively detecting anomalies over unlabeled audit data streams in computer networks. Knowl.-Based Syst. 2014, 70, 103–117. [Google Scholar] [CrossRef]
- Krinidis, S.; Chatzis, V. A Robust Fuzzy Local Information C-Means Clustering Algorithm. IEEE Trans. Image Process. 2010, 19, 1328–1337. [Google Scholar] [CrossRef] [PubMed]
- Zarinbal, M.; Zarandi, M.H.F.; Turksen, I.B. Interval Type-2 Relative Entropy Fuzzy C-Means clustering. Inf. Sci. 2014, 272, 49–72. [Google Scholar] [CrossRef]
- Chambolle, A.; Lions, P.L. Image recovery via total variation minimization and related problems. Numer. Math. 1997, 76, 167–188. [Google Scholar] [CrossRef]
- Drapaca, C.S. A Nonlinear Total Variation-Based Denoising Method with Two Regularization Parameters. IEEE Trans. Bio-Med. Eng. 2009, 56, 582–586. [Google Scholar] [CrossRef] [PubMed]
- Rosin, P.L.; Ioannidis, E. Evaluation of global image thresholding for change detection. Pattern Recognit. Lett. 2003, 24, 2345–2356. [Google Scholar] [CrossRef]
- Ma, J.; Gong, M.; Zhou, Z. Wavelet Fusion on Ratio Images for Change Detection in SAR Images. IEEE Geosci. Remote Sens. Lett. 2012, 9, 1122–1126. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Method | FP | FN | OE | PCC/% | Kappa | T/s |
|---|---|---|---|---|---|---|---|
| Bern | LEE-FLICM | 34 | 307 | 341 | 99.62 | 0.8307 | 14.63 |
| DWT2-FLICM | 107 | 194 | 301 | 99.67 | 0.8620 | 9.66 | |
| NSCT-FLICM | 106 | 173 | 279 | 99.69 | 0.8740 | 5.49 | |
| TV-KMEANS | 130 | 149 | 279 | 99.69 | 0.8767 | 2.99 | |
| N-FLICM | 120 | 168 | 288 | 99.68 | 0.8710 | 3.74 | |
| Proposed | 100 | 172 | 272 | 99.70 | 0.8769 | 4.42 | |
| Coastline | LEE-FLICM | 88 | 2 | 90 | 99.65 | 0.9222 | 5.92 |
| DWT2-FLICM | 189 | 18 | 207 | 99.19 | 0.8328 | 4.19 | |
| NSCT-FLICM | 159 | 38 | 197 | 99.23 | 0.8345 | 4.17 | |
| TV-KMEANS | 169 | 5 | 174 | 99.32 | 0.8582 | 2.43 | |
| N-FLICM | 201 | 42 | 243 | 99.05 | 0.8019 | 2.12 | |
| Proposed | 74 | 5 | 79 | 99.69 | 0.9307 | 2.54 | |
| Yellow River | LEE-FLICM | 905 | 284 | 1189 | 98.54 | 0.7703 | 14.27 |
| DWT2-FLICM | 173 | 826 | 999 | 98.78 | 0.7489 | 7.87 | |
| NSCT-FLICM | 439 | 473 | 912 | 98.88 | 0.8001 | 8.53 | |
| TV-KMEANS | 2087 | 2232 | 4319 | 95.88 | 0.7399 | 8.23 | |
| N-FLICM | 805 | 409 | 1214 | 98.51 | 0.7555 | 4.81 | |
| Proposed | 608 | 237 | 845 | 98.97 | 0.8290 | 7.01 |
| Method | ||||||
|---|---|---|---|---|---|---|
| LEE-FLICM | 0.80 | 1.08 | 1.84 | 98.02 | 0.7860 | 15.78 |
| DWT2-FLICM | 0.65 | 2.04 | 2.70 | 97.29 | 0.6707 | 17.96 |
| NSCT-FLICM | 1.33 | 1.22 | 2.56 | 97.36 | 0.7567 | 21.67 |
| TV-KMEANS | 1.45 | 0.69 | 3.07 | 96.63 | 0.8547 | 12.78 |
| N-FLICM | 1.36 | 1.27 | 2.67 | 97.36 | 0.7575 | 5.92 |
| Proposed | 0.68 | 0.88 | 1.56 | 98.38 | 0.8385 | 6.89 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lou, X.; Jia, Z.; Yang, J.; Kasabov, N. Change Detection in SAR Images Based on the ROF Model Semi-Implicit Denoising Method. Sensors 2019, 19, 1179. https://doi.org/10.3390/s19051179
Lou X, Jia Z, Yang J, Kasabov N. Change Detection in SAR Images Based on the ROF Model Semi-Implicit Denoising Method. Sensors. 2019; 19(5):1179. https://doi.org/10.3390/s19051179
Chicago/Turabian StyleLou, Xuemei, Zhenhong Jia, Jie Yang, and Nikola Kasabov. 2019. "Change Detection in SAR Images Based on the ROF Model Semi-Implicit Denoising Method" Sensors 19, no. 5: 1179. https://doi.org/10.3390/s19051179
APA StyleLou, X., Jia, Z., Yang, J., & Kasabov, N. (2019). Change Detection in SAR Images Based on the ROF Model Semi-Implicit Denoising Method. Sensors, 19(5), 1179. https://doi.org/10.3390/s19051179