1. Introduction
Different from optical sensors, synthetic aperture radar (SAR) is able to obtain images of different characteristics, and work at night and in all weather conditions. However, traditional satellite-bore and air-bore SAR systems are either inflexible for time-critical observing missions or operationally uneconomic. Unmanned aerial vehicle (UAV) borne SAR, being small-sized, easy to launch and remotely controllable, is thus a good choice for many applications, such as fire impact assessment, search and rescue operation, and civil infrastructure inspection missions.
It has long been a hot research topic for SAR system design to meet the size, weight and power requirements of small-sized platforms. To minimize hardware requirements, Frequency Modulated Continuous Wave (FMCW) waveform is usually used. Unfortunately FMCW operation violates the stop-and-go assumption commonly used for pulsed radar systems. It also introduces additional Doppler shifts to the spectrum and range profiles as well as range defocusing and high order phase errors. Similar to Range Cell Migration (RCM) and second order range defocusing problems, these effects tend to be more severe as squint angle increases. Most of the papers correct range profile shift only, leaving range defocusing and high order phase errors uncompensated [
1]. Others take all of them into consideration by exploiting analytical two-dimensional spectrum, but resulting in much too complicated signal formulae, making them not straight-forward for subsequent analysis [
2].
As is well known, steering radar beam from zero Doppler direction can provide squint angle- dependent scattering information, and also help to fill up shadow areas. It also offers flexibility for tactical purposes. On the other hand, it imposes requirements for higher radar pulse repetition frequency (PRF) and more efforts in signal processing. To deal with the intensified range-azimuth coupling in squint cases, and avoid computational efficiency degradation most time domain algorithms have experienced [
3,
4,
5,
6,
7,
8], several frequency domain algorithms have been devised and modified, such as
[
9], RD with Second-order Range Compression (SRC) [
10], Non-linear Chirp Scaling with range dependent SRC taken into consideration [
11], just to name a few. However, these algorithms all work with a skewed spectrum, which can easily lead to spectrum aliasing in high squint angle or wide beam cases. Another strategy is to exploit the squint minimization technique [
12], which deforms the skewed spectrum into a regular one and handles the side effects it brings about in later processing, so that PRF can be largely reduced and system complexity can be controlled. The side effects consist mainly of azimuth dependent RCM and Doppler rate, and scatterers of different slant ranges residing in the same range gate, thus requiring further correction processing.
Due to its light weight and aerodynamic mechanisms, rotor-UAV is very susceptible to atmosphere influences and platform disturbances, making Motion Compensation (MoCo) indispensable. Furthermore, small UAVs cannot carry high accuracy Inertial Navigation System (INS) due to their limited load capacity. Thus it is imperative to extract motion information from the raw data in order to obtain highly focused UAV SAR image. However, with the motion errors further complicated by the previously mentioned side effects, even the state-of-art phase gradient algorithm (PGA) [
13,
14,
15,
16] may fail to extract the motion information accurately if directly applied. What’s more, as SAR operating frequency gets higher and higher, it will be harder and harder for motion compensation to be done, since even moderate deviations will lead to phase error of over several radians.
In this paper, we propose to deal with range-azimuth coupling using the squint minimization technique, which provides a more interpretable and near full solution to the intra-pulse motion issue. The azimuth dependent RCM is then rectified with a two-stage block-wise scheme, and finally, azimuth compression is carried out via Azimuth Nonlinear Chirp Scaling (ANCS) [
12,
17,
18]. A Squinted Azimuth-dependent PGA (SAPGA) is being used to deal with the azimuth dependent Doppler parameter and inexact deramping problems in motion extraction. Autofocus is conducted with the proposed SAPGA and Minimum Entropy Algorithm (MEA) [
19,
20] based algorithms, after the severe platform instability had been partially stabilized with a Doppler tracker. The rest of the paper is organized as follows: squinted UAV-borne SAR geometry is described in
Section 2, followed by imaging algorithm and motion compensation method in
Section 3 and
Section 4 respectively. Simulation and real data experiment results are given in
Section 5, and finally conclusions are drawn in
Section 6.
2. UAV-Borne SAR Geometry
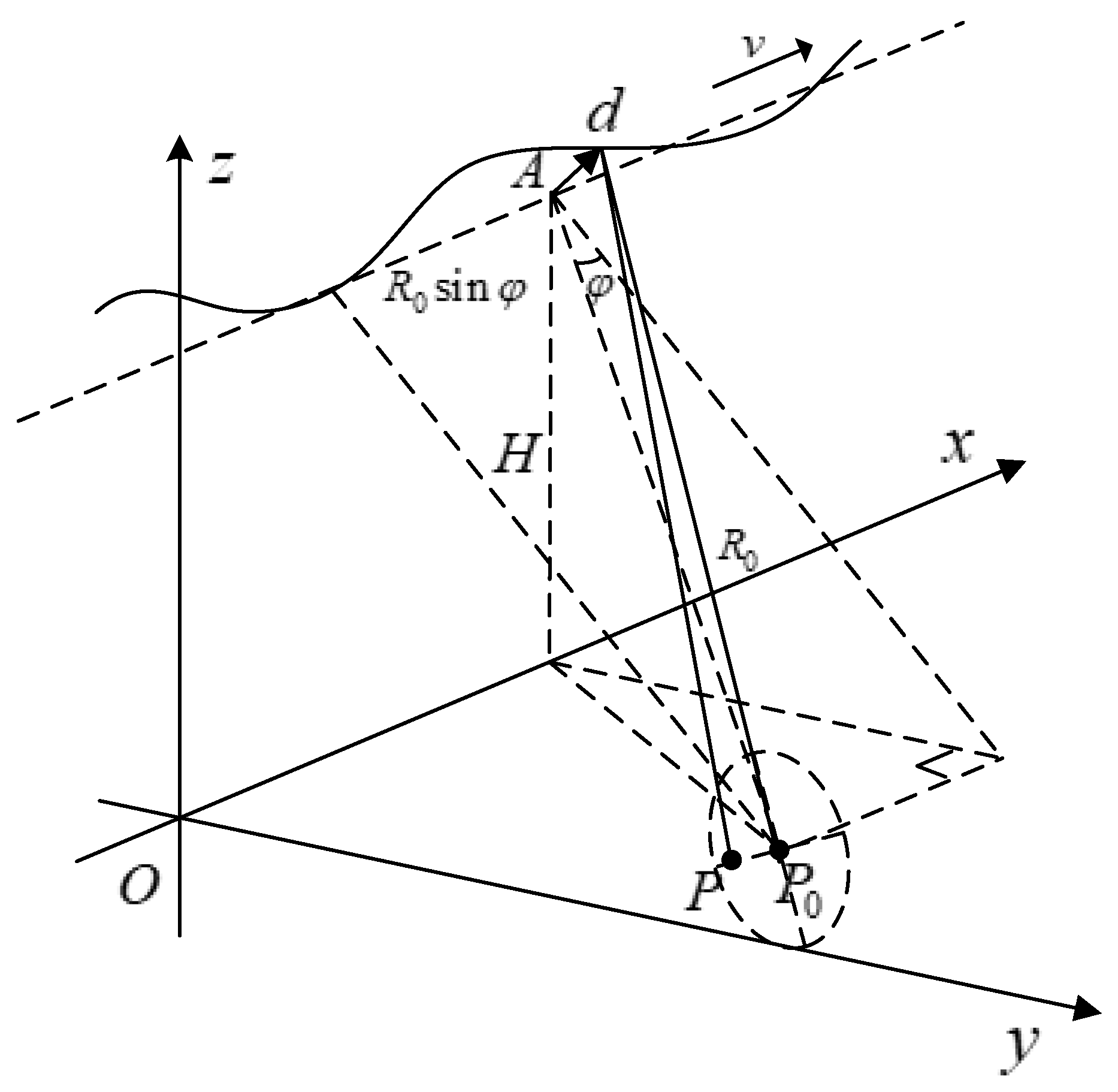
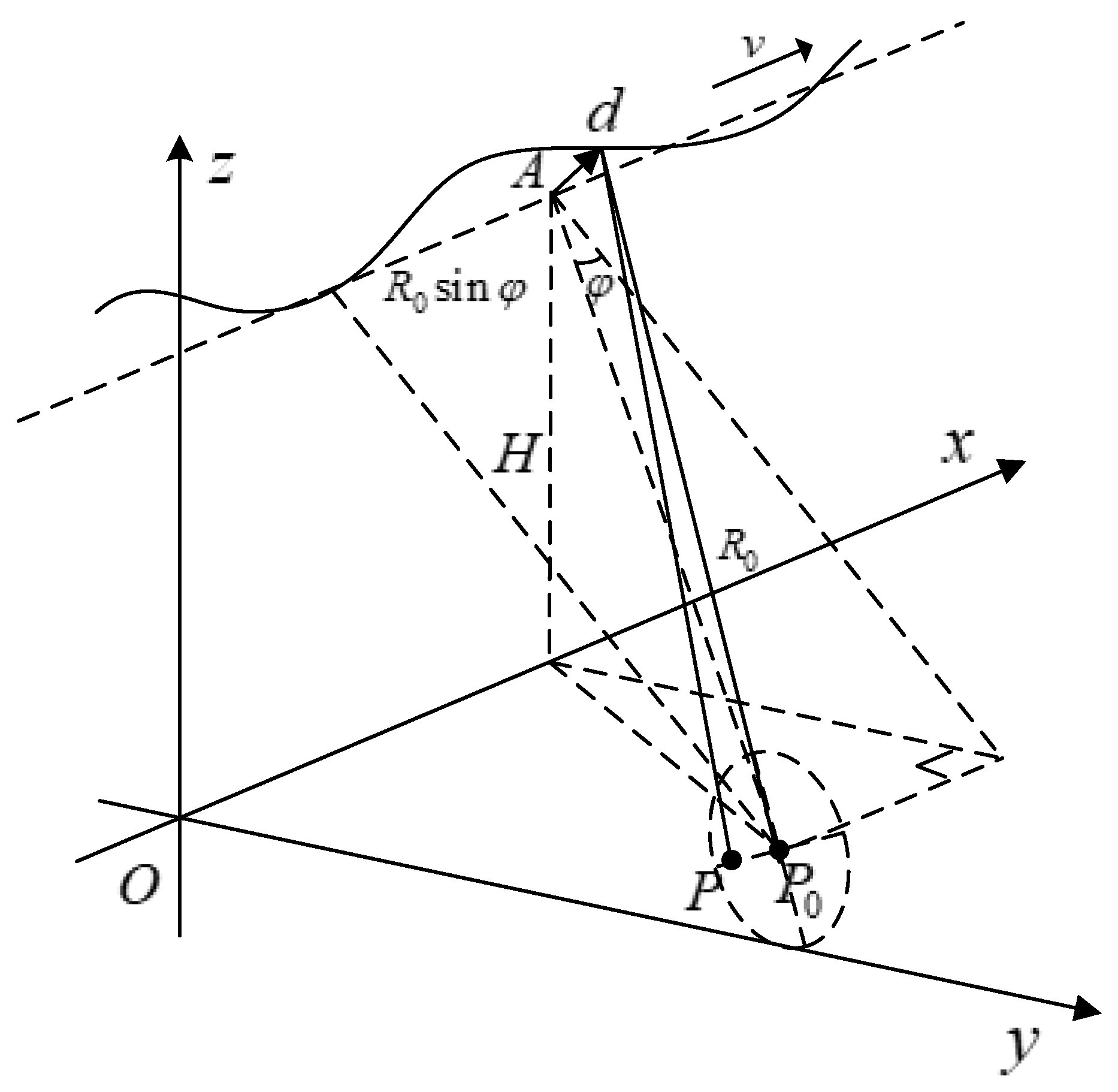
In stripmap SAR imaging, the radar platform is assumed to be travelling in a uniform straight line, but due to platform perturbations and atmosphere turbulences, the platform may deviate from the ideal trajectory by a significant amount. A typical geometric diagram of the SAR system is depicted in
Figure 1, where the dotted line is the ideal trajectory, and the solid sinusoid is the actual trajectory. Mathematically, for any scatterer
in the imaging scene, instantaneous slant range to the radar platform in its ideal trajectory
can be expressed as [
9]:
where
is the squint angle, and
is the slant range at the aperture center.
The above radar distance model is derived under stop-and-go assumption valid for conventional pulsed radar, which assumes that the radar platform is stationary during the time it transmits a pulse and the time it receives its echo. For FMCW radar, effects of intra-pulse motion will be significant and affect image focusing, causing additional range shift, defocusing and phase artifacts. Thus the distance model has to be reconsidered [
2]. Let FMCW signal be transmitted at instance
and received at
, then
satisfies:
further accounting for trajectory deviations with an initial displacement
, velocity error
, and acceleration error
, then:
where
is the scene center. The above approximation is made under far field and center beam approximations [
21].
3. Imaging Algorithm
Suppose linear frequency modulated signal of chirp rate
is transmitted, then received signal after dechirp-on-receive processing with 0 derchirp delay can be written as:
where the second order term of
is the Residual Video Phase (RVP) term, which can be easily removed [
22].
Multiply with the squint minimization term
, where
,
, replace
with
, and take Fourier transform with respect to
using principle of stationary phase, we have:
in which
. For symbol simplification,
is the azimuth spatial bandwidth,
accounts for trajectory errors, and
is the the point of stationary phase.
We note that, while is associated with a factor in (5), (5) can be handled by replacing the squint minimizaiton term with , where . When followed by a slant range spectrum scaling, the square-root term is then identical to that of a pulsed SAR system. The impact on range resolution after slant range spectrum scaling shall be negligible since is usually small, especially in UAV SAR.
Then
can be rewritten as:
and
Expanding the first exponential term of
into Taylor series up to the second order term with respect to
, we have:
and:
is the phase modulation term, is the RCM term in which the last term is introduced by intra-pulse motion, and is the SRC term accounting for additional chirp modulation with the last term which is introduced by intra-pulse motion after squint minimization. From the above formulas, we can see that RCM and range chirp modulation are largely reduced; however, both phase modulation term and RCM term are related to x-coordinate of the scatterers. So, handling them with the usual RCM correction (RCMC) and azimuth compression terms will only fully focus the scatterer at scene center, and result in residual RCM and phase error for scatterers away from scene center.
Therefore, in this paper, we first correct RCM with respect to scene center, then divide the coarsely RCM-corrected and focused data into azimuth sub-images and correct the residual RCMs with respect to their own scene centers with
where
, which can be determined from zeroth order Taylor expansion of
. Block length should be properly selected, so that residual RCM of scatterers within one sub-image can be ignored. The advantages of this scheme are, firstly, maximum residual RCM is the same for all the sub-images no matter how far they are from the scene center; and secondly, no approximation is assumed to model the azimuth dependency of the Doppler parameters, so that even if there is residual RCM, it can be exactly known and easily controlled for the entire scene.
Residual phase differences can be handled with ANCS to avoid image discontinuities, and equalizes Doppler parameters of scatterers in the same range gate with a perturbation function in the azimuthal space domain.
4. Motion Compensation
Small-sized UAV platforms can easily deviate from its planned trajectory due to wind turbulences and/or unbalanced motor power delivery, which usually leads to large variance of the Doppler centroid:
where
is the wavelength. This can be resolved with a Doppler tracker indicated by ① in the flowchart, which determines Doppler centroid by identifying peak locations of their frequency spectrum. While the performance of Doppler tracker is subject to many factors and thus unable to obtain highly accurate estimations, it is still accurate enough to reduce image defocus by a large extent. After which, a more sophisticated algorithm can be used to obtain more refined focusing.
4.1. Squinted Azimuth-Dependent PGA
After squint minimization and the above two-stage RCMC,
can be expressed as:
for a general scatterer
in the
n’th subaperture having residual NsRCM not exceeding one range cell, where
is the point of stationary phase, and
denote azimuthal coordinate of the subaperture center.
After deramping with
we have,
where
From which we can see that, the second order term can hardly be canceled when squint angle is not zero. Exact deramping can only be achieved for the center scatterer, and azimuth dependent shift and defocusing still exist for scatterers other than the center one. This inconsistency can be attributed to, firstly, the aforementioned azimuth dependency of the Doppler parameters, and secondly, the nonlinearity of the difference systems formed by the phase of the deramping function, which is . The inexact deramping will affect motion error estimation, making it hard to combine motion error estimate from more than one scatterer. So that, in order for more accurate estimate, inexact deramping induced defocusing should be eliminated prior to motion error combination.
We thus resort to using the azimuthal locations in the pseudo-image after azimuth FFT. Suppose that the selected prominent scatterer is centering at the frequency bin
, so that we have
and
where
As soon as we have the azimuthal coordinate of the scatterer, exact deramping function can be constructed as
and then defocusing can be eliminated. This procedure can be iterated to improve the estimation accuracy of the azimuthal coordinate of the scatterers.
In the above Squinted Azimuth-dependent PGA (SAPGA) based MoCo scheme, SAPGA is applied to sub-apertures to obtain phase error estimation, refined by MEA, and then filtered and concatenated to full-aperture length. The whole procedure is indicated by ② in the flowchart. The reasons to refine SAPGA estimate with MEA is that, SAPGA still relies on the scene content for prominent scatterers to focus on, while MEA performs well even in natural scenes. Furthermore, the latter converges quickly when fed with the relatively accurate initial value provided by SAPGA. Once phase error is available, first order MoCo can be conducted by delay adjustment and phase correction, exploiting the analytical relationship between phase error and NsRCM. Furthermore, as imaging swath is relatively small in low attitude UAV SAR, the number of prominent scatterers in each sub-aperture is not large enough, so that accurate range dependent estimation can be hardly realized. Therefore, we divide the sub-apertures into slightly overlapping range blocks, and apply the aforementioned MoCo method to each range block to account for range dependencies, which is indicated by ③ in the flowchart.
4.2. NsRCM
The analytical relationship between phase error and residual NsRCM can be deduced by inspecting Equations (6) and (7), where
comprises phase error term and residual RCM term, which can be obtained through first order Taylor expansion with respect to
and expressed as (see
Appendix A):
where
. The above approximation holds when azimuth bandwidth is relatively small and squint angle is not too large, in agreement with our sub-aperture-based SAPGA motion estimation scheme. As
is a one to one mapping to
X with no
term involved, this relationship is maintained even after transforming into azimuth spatial domain. It is obvious that, residual RCM is slightly magnified following the processing procedure. However, the amount of magnification is far smaller than that of direct squinted wave number domain processing [
23]. Furthermore, the inconsistency between phase error and NsRCM can be circumvented if range compression is done before transforming to the azimuthal space spectrum domain; however, a more time consuming interpolating scheme is needed to handle the SRC. For MoCo, this inconsistency should be taken into account when delay adjustment is done after range compression.
The flowchart of the overall MoCo scheme is shown below in
Figure 2, where MoCo steps are in the red dotted boxes and
N is the maximum number of iteration. The majority of the imaging and motion compensation steps are quite fast. The only potential bottleneck is the MEA step whose computational complexity analysis can be found in [
24]. In the MEA step, most of the time is spent in gradient vector and Hessian matrix computation as well as Fast Fourier Fransform (FFT) operations transforming the data between image and phase history domains. As the size of gradient vector, Hessian matrix, and FFT operation is directly proportional to the length of the processing aperture, the choice of the small-aperture-based autofocus strategy will also help to improve the computational efficiency. Moreover, the maximum number of iteration is set to 2, which is observed to be sufficient for obtaining satisfactory focusing results while saving computational time.
6. Conclusions
To process small-squinted UAV-borne SAR data, we have proposed a signal processing approach which effectively focuses the data and achieved high resolution SAR imaging. The proposed signal processing approach accomplishes squint mode imaging and motion compensation for FMCW SAR by decreasing its impact on the processing procedure, which largely simplifies the focusing workflow and opens the potential for larger squinted imaging. A PGA variation called SAPGA is also proposed, which successfully handles azimuth dependent Doppler parameter and inexact deramping problems and realizes accurate data-driven motion compensation. The proposed imaging and motion compensation algorithm eases mission design considerations for small UAV-bore SAR platforms and saves cost on highly accurate INS instruments and high-end hardware, making UAV-bore SAR good choices as test-bed for many modern SAR applications.
As imaging is achievable in monostatic UAV-bore SAR, our future work will be towards repeated path interferometric SAR to obtain altitude information about the imaging scene, thus realize 3D imaging on small platforms. Furthermore, once stationary clutters are eliminated, moving target indication (MTI) can be performed, which is also important for modern UAV-bore SAR applications. The availability of altitude information, on the other hand, will improve the accuracy of MTI, thus towards a highly accurate and cost efficient 3D imaging and MTI system.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}