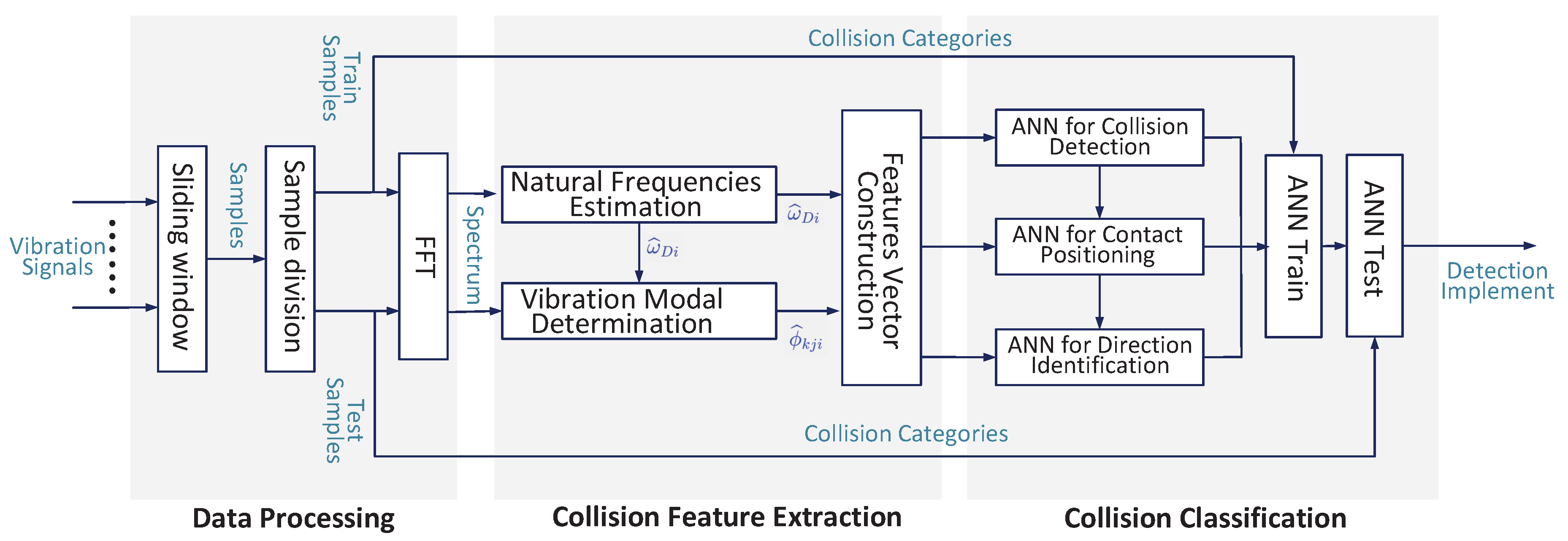
This section address the vibration presentation and its characteristics. First, the modeling method of vibration response is proposed with dynamic equations and transfer functions. Then, the typical features are analyzed based on the mathematical model, together with illustrative examples.
2.1. Vibration Response under Collision and Its Mathematical Modeling
In this paper, our research focuses on the vibration response of multiple test points along manipulator structure under several experiments. An effective method for dealing with vibration of kinematic chain mechanism is the elastodynamic modeling and analysis [
10,
11]. In this method, each critical mechanical structure and component is simplified with stiffness, viscous and mass parameter. As for a
dof manipulator, it is composed of a series of motors, gears, links and joints, some of which will generate deformation and vibration under collision. For this reason, the dominant vibration structures can be considered as elastic bodies with certain stiffness and viscous coefficients.
We consider a
dof manipulator with
m dominant vibration structures. Its axis displacement vector can be defined as:
where
is the vibration deviation, and
denotes the joint displacements. Furthermore, we assume the equilibrium points of
is
. The dynamic equation of manipulator can be written as:
the variable
,
and
denotes the joint torque generated by motor, friction and structure deformation respectively. We denote
, and
. The subscript
D denotes the dominant vibration structures, and
M denotes the drive motor of manipulator.
On the other hand, the torque generated by the deformation of vibration structures can be given by:
where
,
is the vibration dynamic coefficient matrix. Furthermore,
,
denotes the stiffness and vicious coefficient of
dominant vibration structure respectively.
We assume that the gravity and friction is compensated by feedback control loop, and the Coriolis and centrifugal effect generated by structure deformation is relatively small. In most cases, the displacement of
is much smaller than
, and the inertia matrix
is mainly determined by joint displacement. Furthermore, the torque vector generated by collision is assumed as
. Then we get the dynamic function of manipulator as follows
where
and
is the associated geometric contact Jacobian matrix to
m vibration structures and
n robot motors, respectively. However, the collision torque vector
and contact Jacobian
,
is typically unknown.
Denoting
,
, and
,
, an
n inputs and
outputs state-space equation is obtained
where
u is the active motor torque, and
is torque vector generated by collision, and the related parameter matrix is given by:
Then we get the modal analyzed transfer function from collision torque
to vibration deformation
as follows
We considered the structure of system matrix and , and we got that and . Let be eigenvalues of , and , be the eigenvalues of .
From the partial fraction expansion, the modal analyzed transfer function
becomes
By modal analysis, can be expressed as a linear sum of vibration modes, m modes of which are generated from the m dominant vibration structures. Furthermore, the other n poles which come from , correspond to the n-dof active dynamic of manipulator.
Then the natural frequency of vibration along manipulator can be obtained by and .
The matrix
corresponds to the rigid body vibration mode and is positive semidefinite, and it has the following structure
For any , the subscript denotes the serial number of vibration test position, denotes the serial number of collision torque in vector , and is the number of vibration modes.
We considered the structure of system matrix , it is mainly determined by inertia matrix , vibration dynamic coefficient matrix and , of which the latter two remain nearly unchanged. That means the natural frequencies will vary with joint displacement .
As the stiffness coefficients of manipulator structure are usually considerably large, there exist several eigenvalues of relatively larger than that of , which comes from the active dynamic of robot and reflects the normal working frequency of manipulator. For this reason, there exist several natural frequencies of vibration that are obviously bigger than the frequency band of active dynamic of robot, i.e., , and hold.
So we get an important conclusion: the dominant natural frequency of vibration under collisions is independent of the dynamic property of robot. When the inertia matrix is given, the natural frequency under collision should remain the same during different dynamic processes or static statuses.
Furthermore, the modal matrix depends on the value of geometric contact Jacobian matrix and . For this reason, the contact position information can be induced by the value of vibration mode matrix .
2.2. Vibration Features Analysis and Illustrative Example
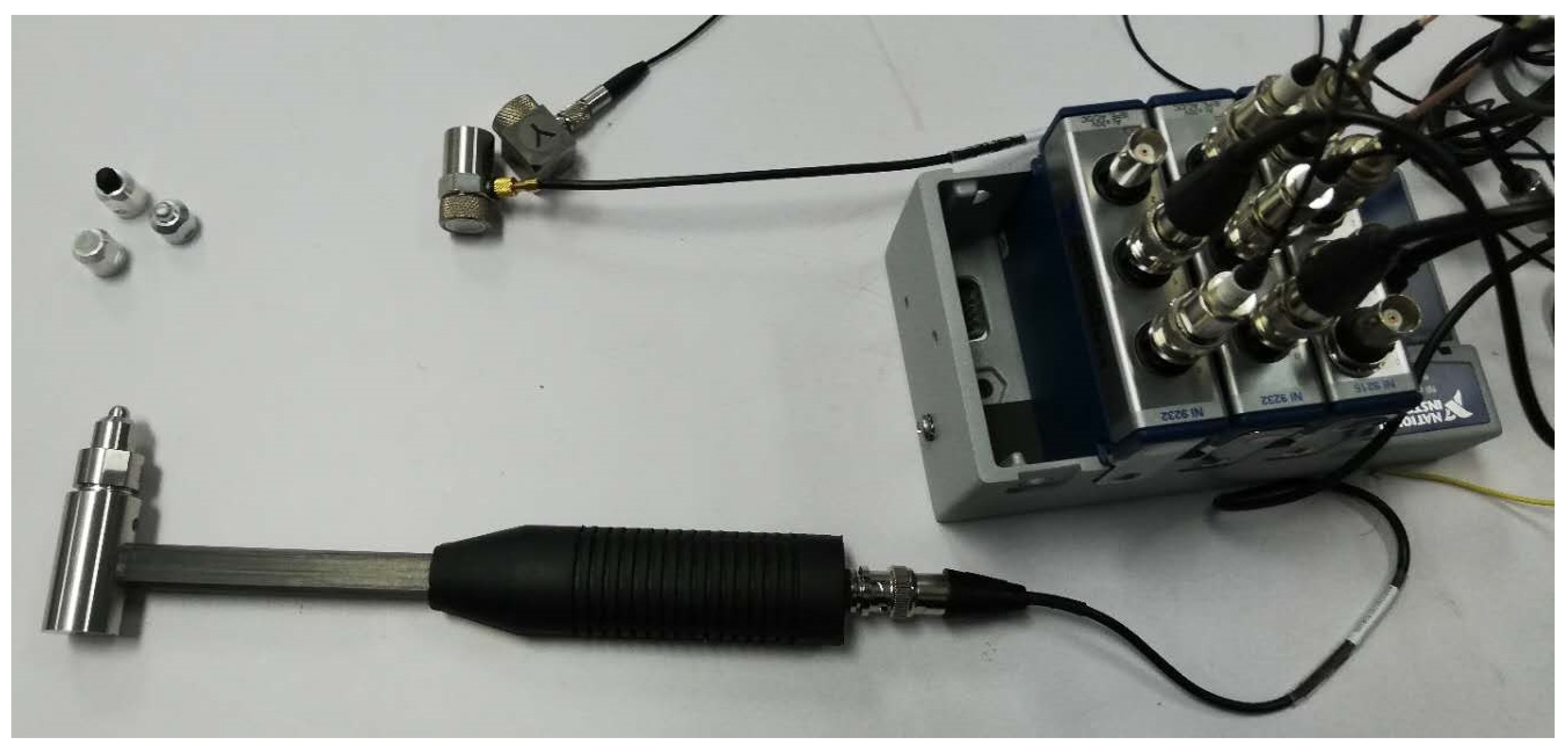
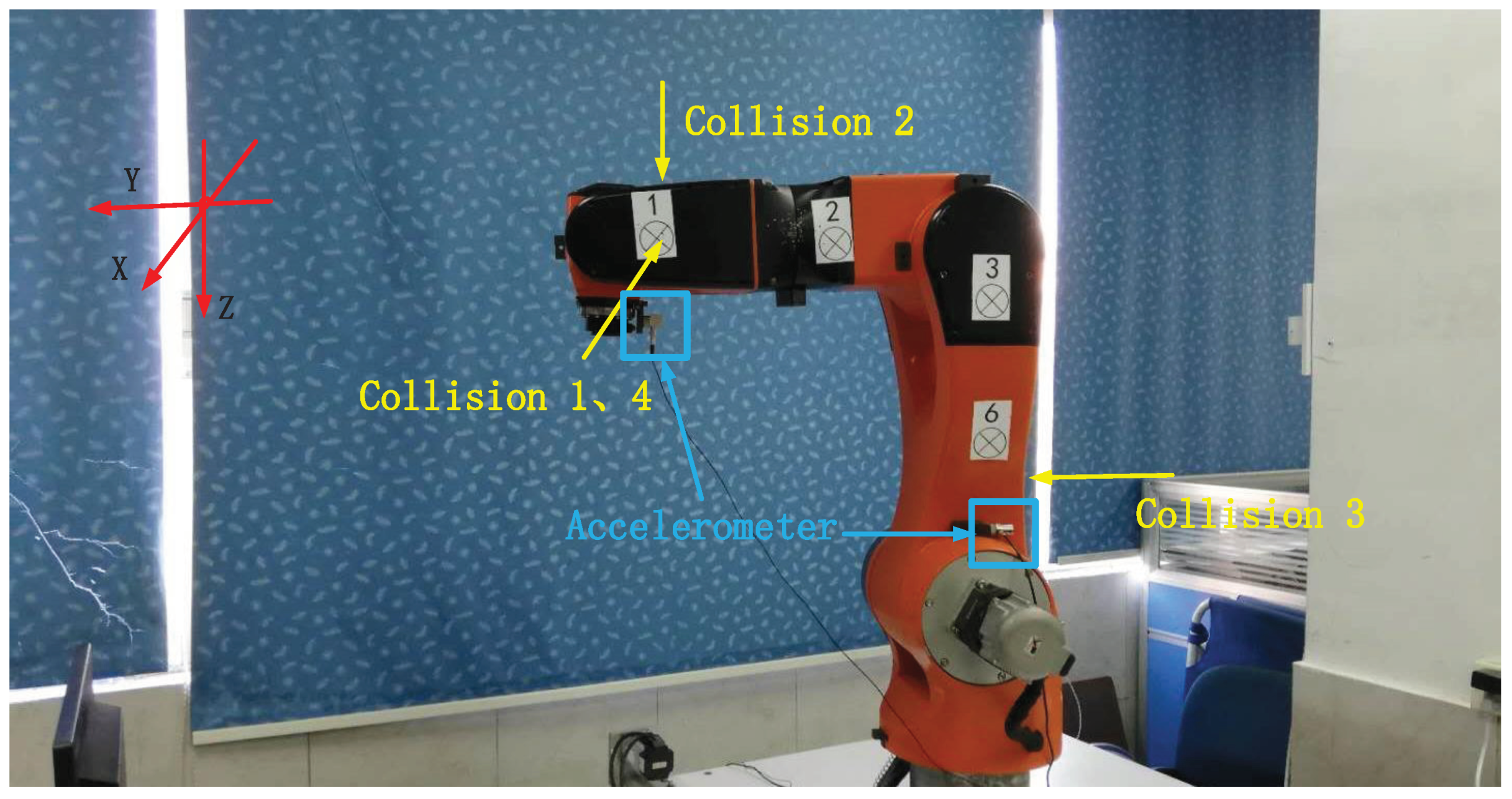
This section illustrates the characteristics of vibration modal shape of manipulator under collisions with example. The test data were collected on the STR6-05 robot arm (see
Figure 1), a 6-DOF heavy-load manipulator. Four consecutive collision experiments were conducted while the end-effector moved in line; the collision conditions are listed in
Table 1.
The joint displacement and motor current signals of joint 1, 2 and 3 are shown in
Figure 2. We label the contact time of corresponding collision events on the figure. We find that there are some shock changes in the motor currents but little change in joint displacements. However, it is hard to detect collision events from current signals directly because of dynamic change and the noise involved in signals, particular for heavy-load manipulator. As shown in the figure, we cannot find some obvious features for collision 1.
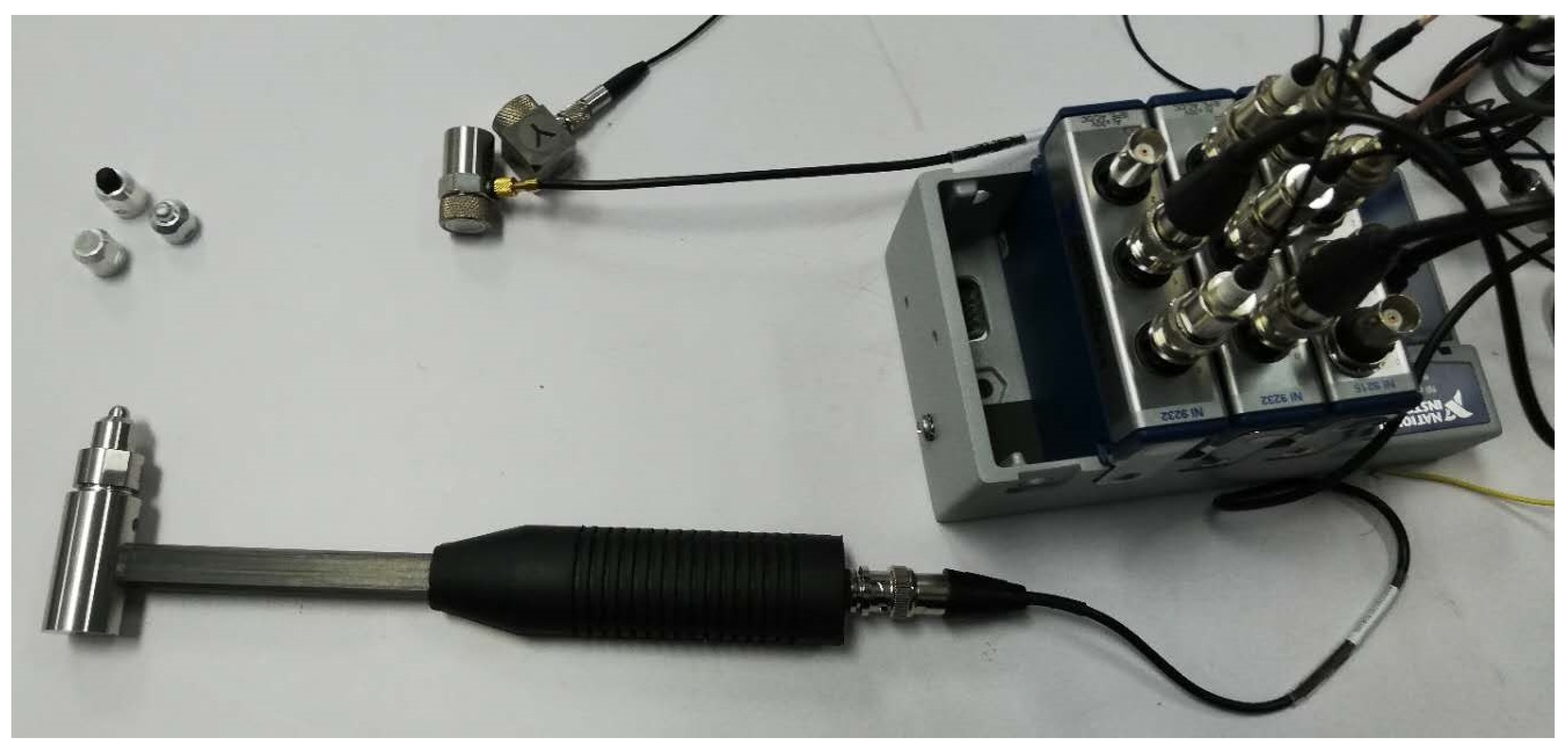
For vibration signal measuring, the 1A113E and 1A114A industrial accelerometer (made by Donghua Testing Technology) with NI-9232 data acquisition module is used. The 1A113E accelerometer (uniaxial) is mounted beside joint 2, perpendicular to the direction of joint 1 and joint 2. The 1A114A accelerometer (triaxial) is equipped beside the end-effector of manipulator.
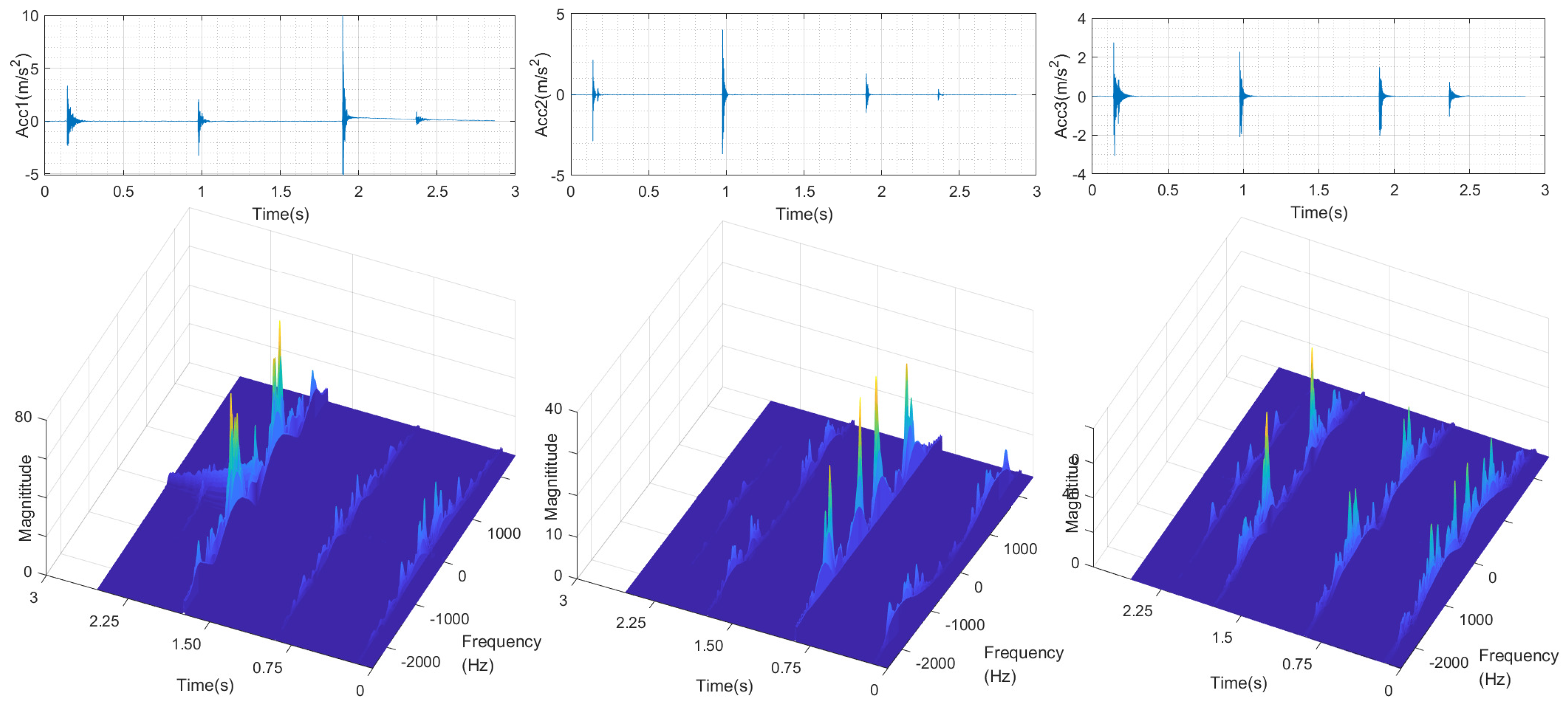
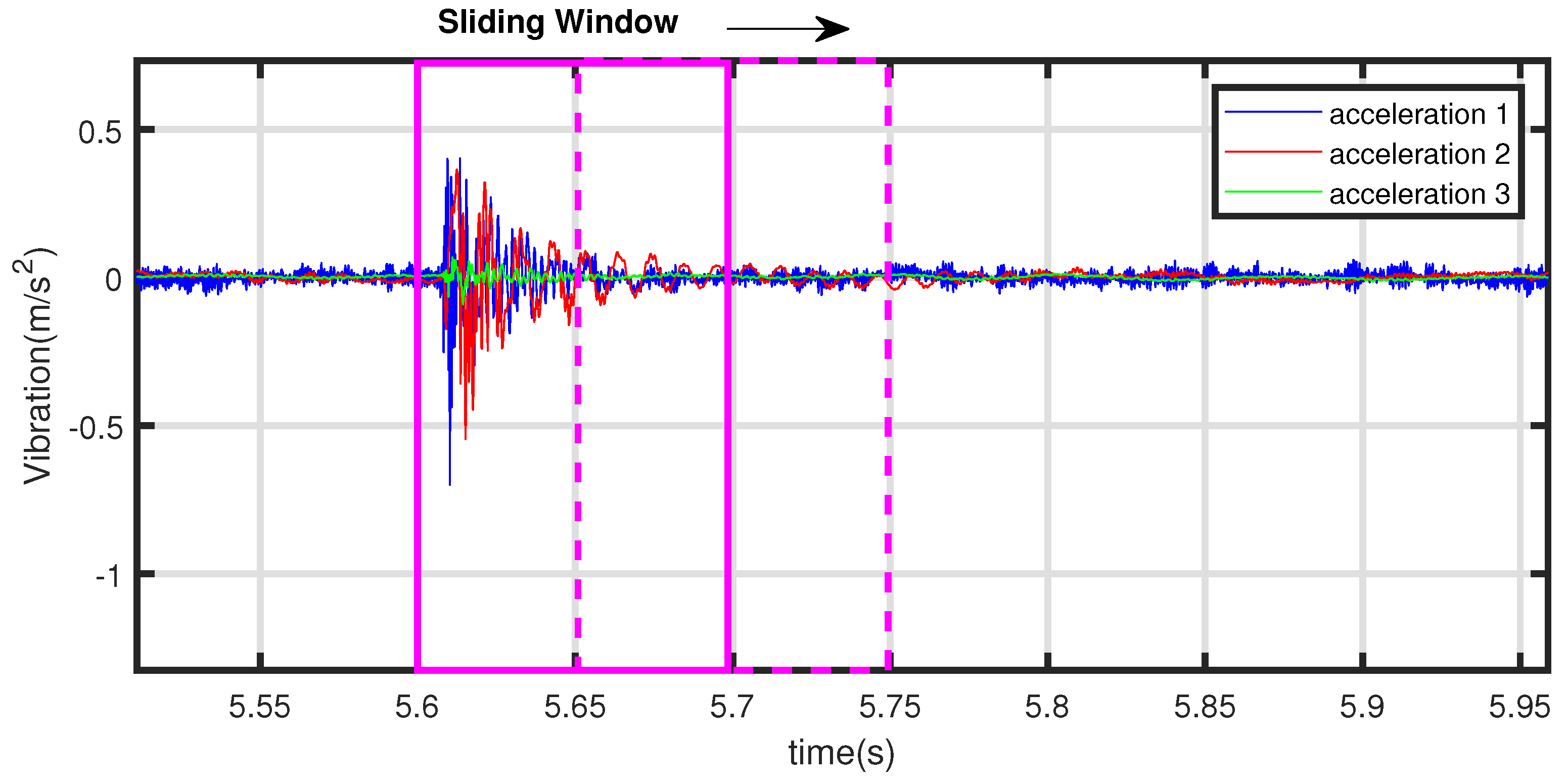
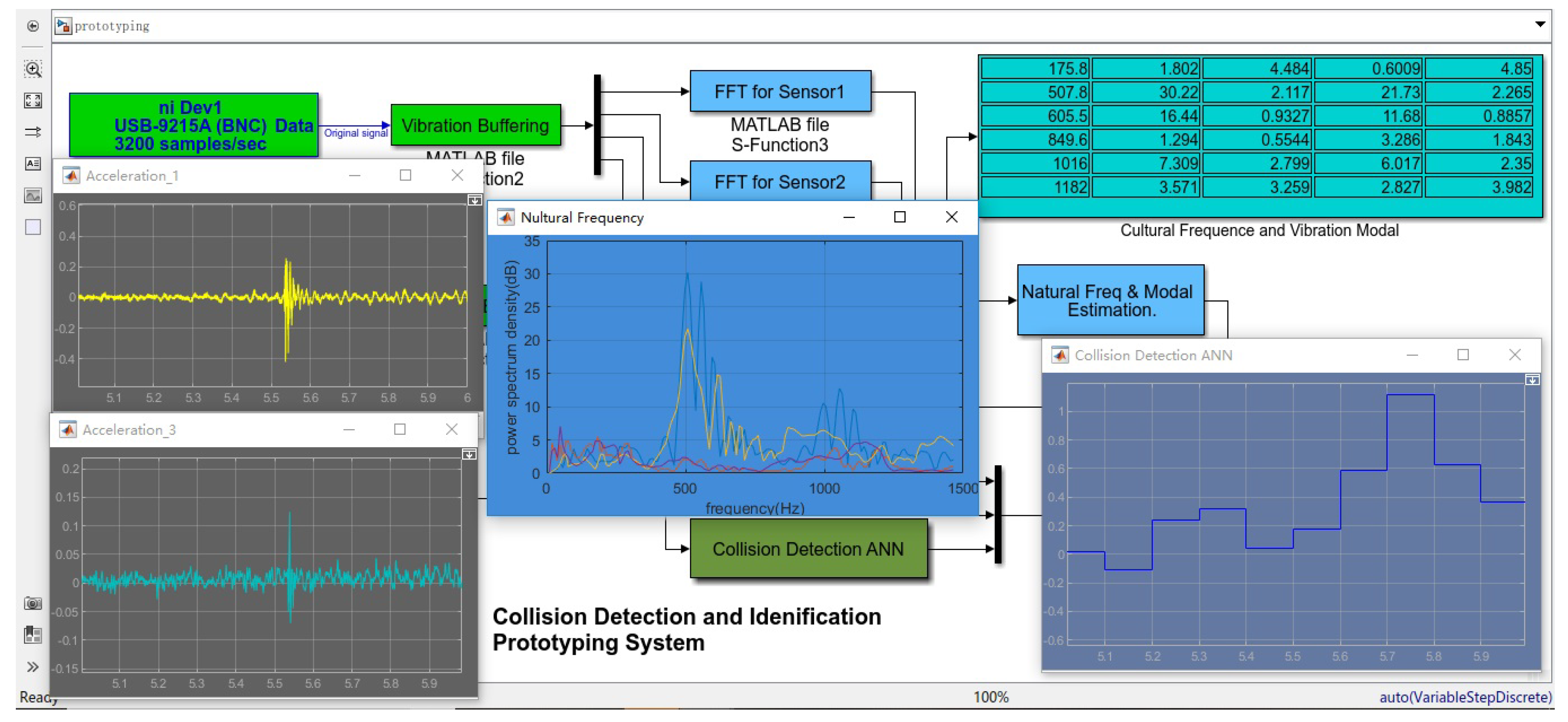
The vibration acceleration and vibration modal is shown in
Figure 3. The first signal comes from 1A113A located beside joint 2, and the latter comes from 1A114A beside end-effector, corresponding to two perpendicular directions.
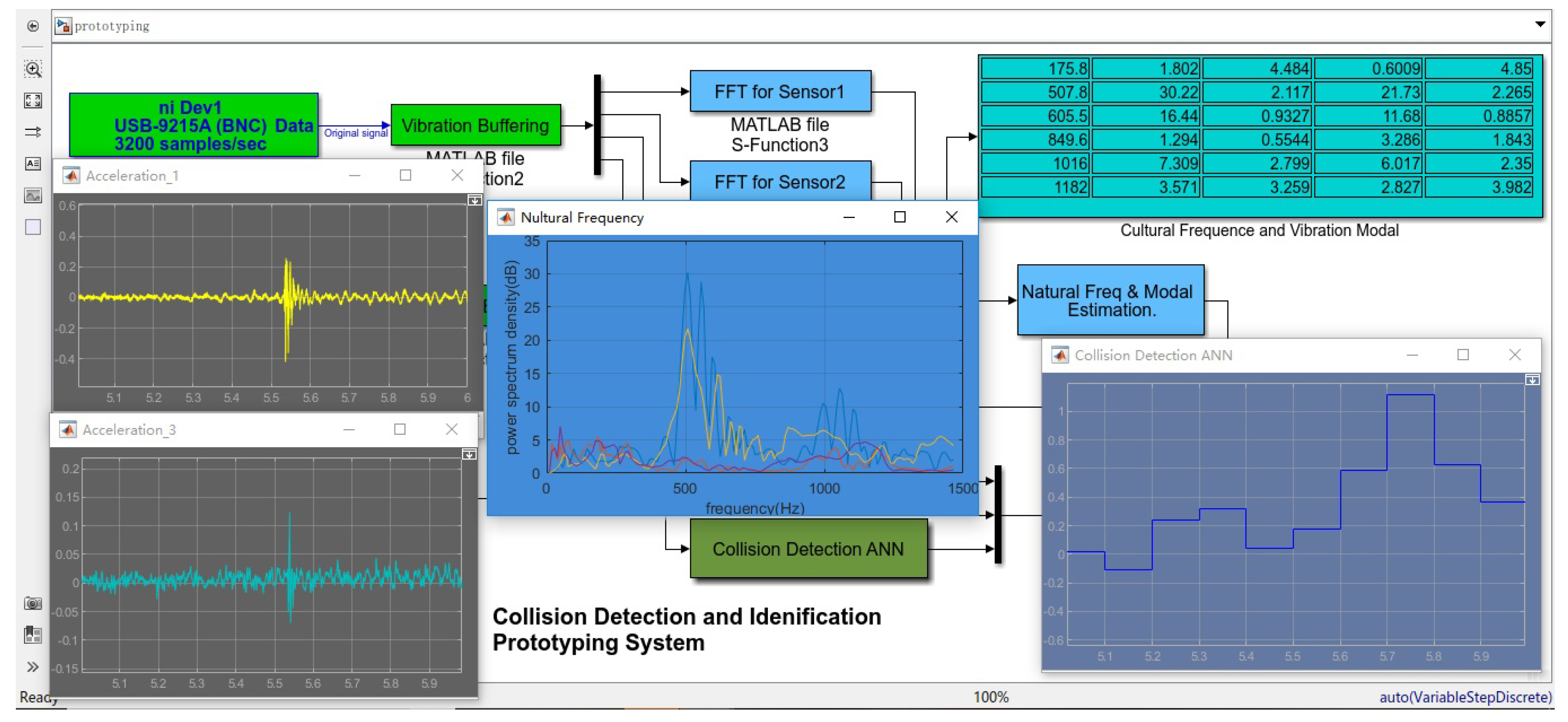
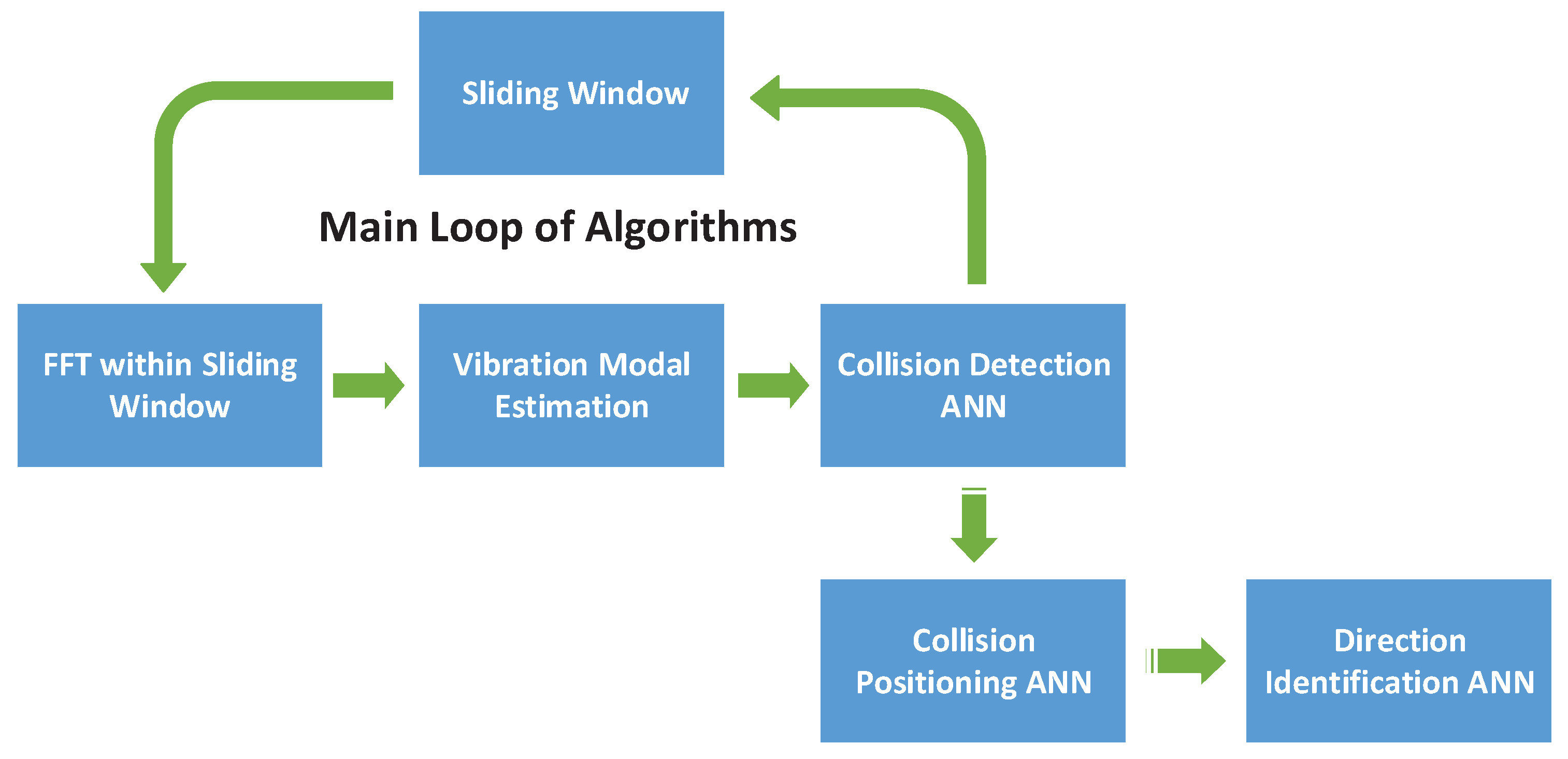
The frequency characteristic of each accelerometer within sliding windows is shown in
Figure 3. There are four obvious frequency charts corresponding to four collisions in each vibration signal. The peak frequencies, i.e., the natural frequencies of three accelerations corresponding to one collision are approximately the same, with different energy densities. The magnitudes of all the peak frequencies constitute the modal matrix
in Equation (
8).
Figure 3 shows that the vibration modes of different parts along robot structure have the following characteristics:
The contact position information can be analyzed with vibration modes of different sensors. The main vibration frequency of nearer sensors is usually higher than sensors far from contact position. That is because manipulator structure can be seen as a low-pass filter, the higher frequency vibration signal is reduced during the propagation process. For example, the magnitude of the 3rd collision in the 1st sensor is comparatively higher than that in the 2nd sensor signals. That is because the 3rd collision is conducted near the base, which is much nearer to the 1st signal.
Similarly, the contact direction can also be determined with vibration modes. The relative energy density value of different directions in the triaxial accelerometer can be used to detect the contact direction. Generally speaking, the vibration of collision direction may have the comparatively higher energy density. For example, the 1st and 2nd collision took place at the same part with different directions, the 2nd magnitude is higher than the 1st one in the 2nd signal while the 2nd magnitude is smaller than the 1st one in the 3rd signal, as is shown in the figure.
Furthermore, contact material information can also be reflected by vibration modal. The band width of the 4th collision is much lower than the other 3. That is because the frequency band of human hand contact force is comparatively narrow.
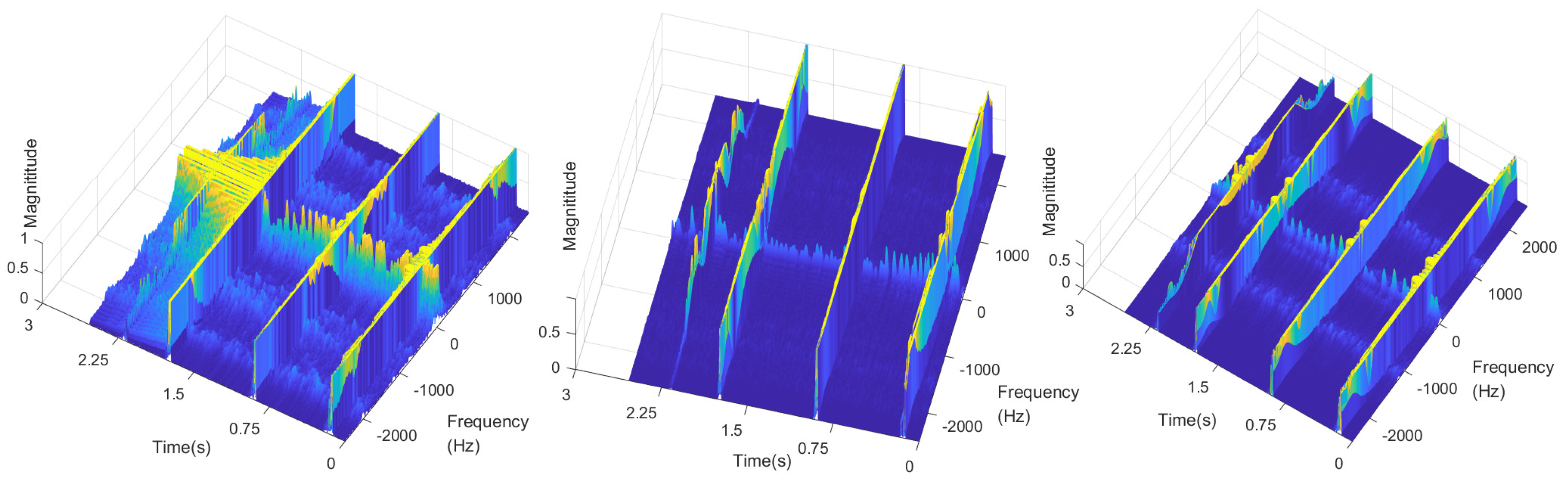
Limiting the range of magnitude below 1 dB, we got the frequency characteristic of normal dynamic comparative to collisions in
Figure 4. It shows that the natural frequency of active dynamic appears at low frequency segment (always below 50 Hz), while the vibration frequency by collision appears at intermediate segment. That means the eigenvalues of
is much smaller than that of
in Equation (
5), and the dynamics of normal operation do not affect the natural frequencies of collisions.
Obviously, the natural frequencies and modal is mainly dependent on the inertia matrix, and independent of the robot dynamic. This means that the detection algorithm can be designed without considering the dynamic property of the robot, and the training and test samples for the model independent method can be collected in some simple or static scenarios.
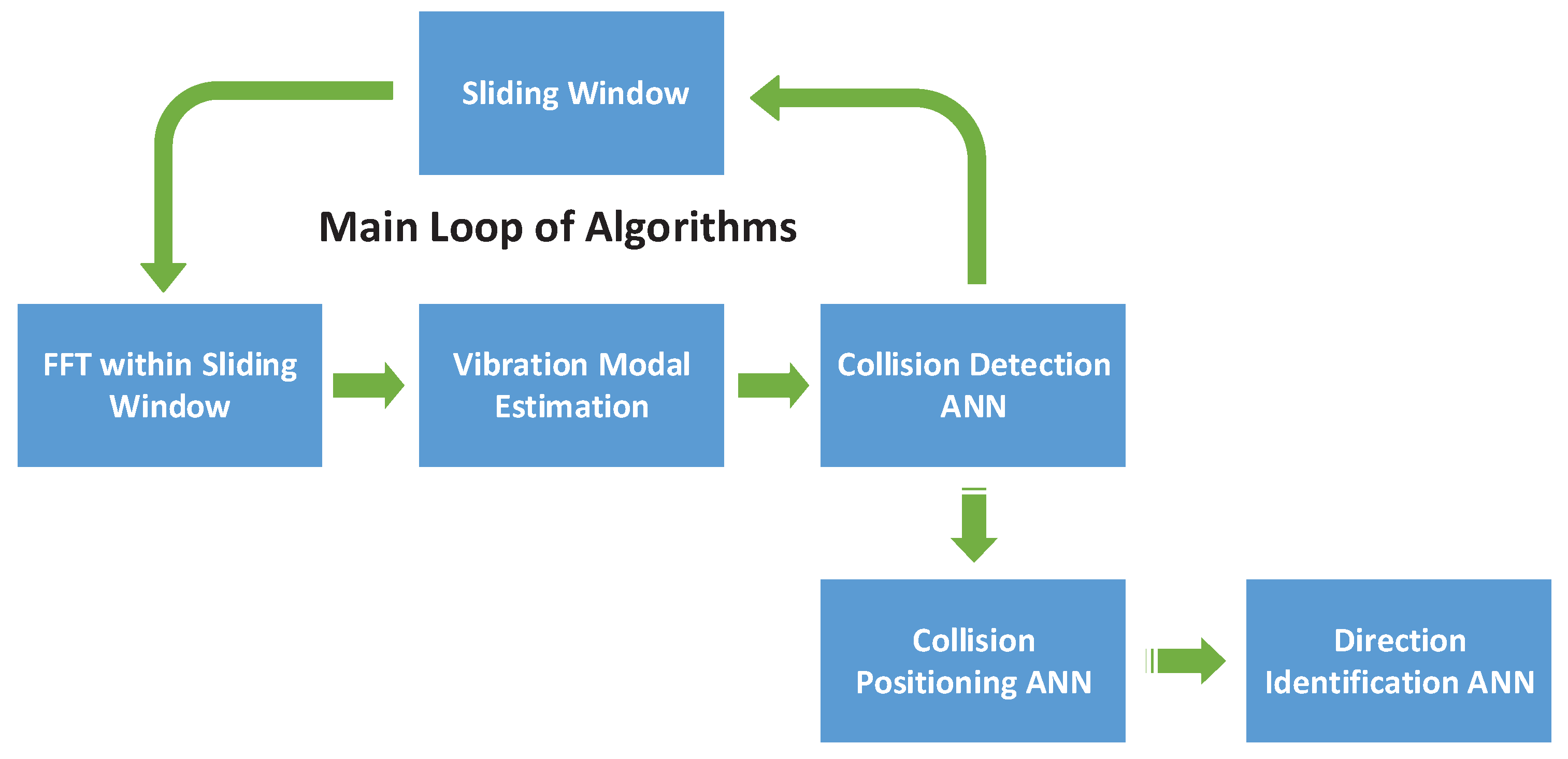
Since collision will generally cause shock vibration, and its natural frequencies are mainly contained in the high-frequency domain, several symptom parameters in the frequency domain can be selected to represent the collision event. Extracting collision information from frequency domain signal requires proper understanding of the process. For frequency features, such as natural frequencies, the vibration modal shown in the spectrum often has direct or indirect connection to certain dynamic events.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}