The Global Navigation Satellite Systems Reflectometry (GNSS-R) Microwave Interferometric Reflectometer: Hardware, Calibration, and Validation Experiments

 , , , and
, , , and
Abstract
1. Introduction
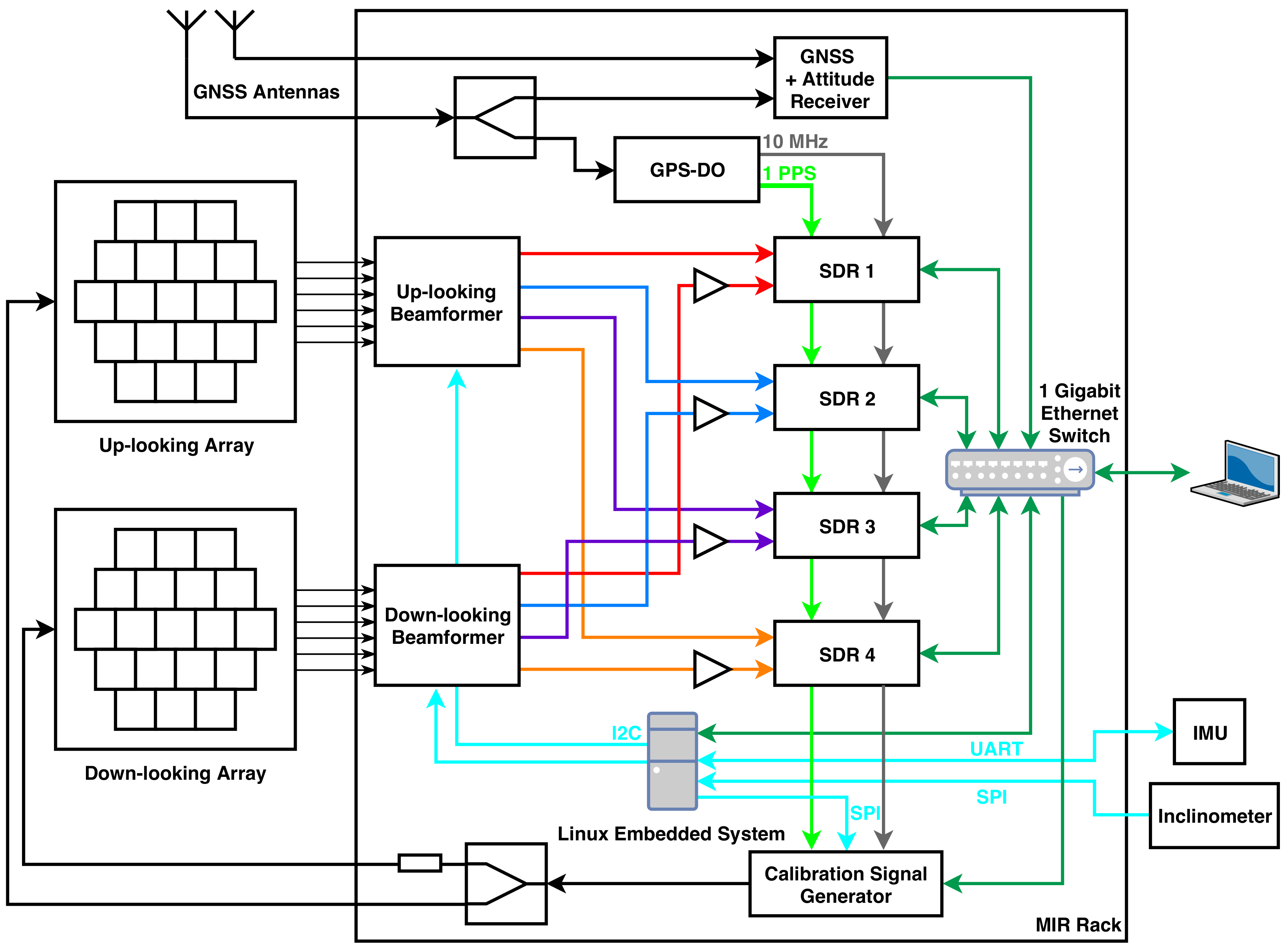
2. Instrument Overview
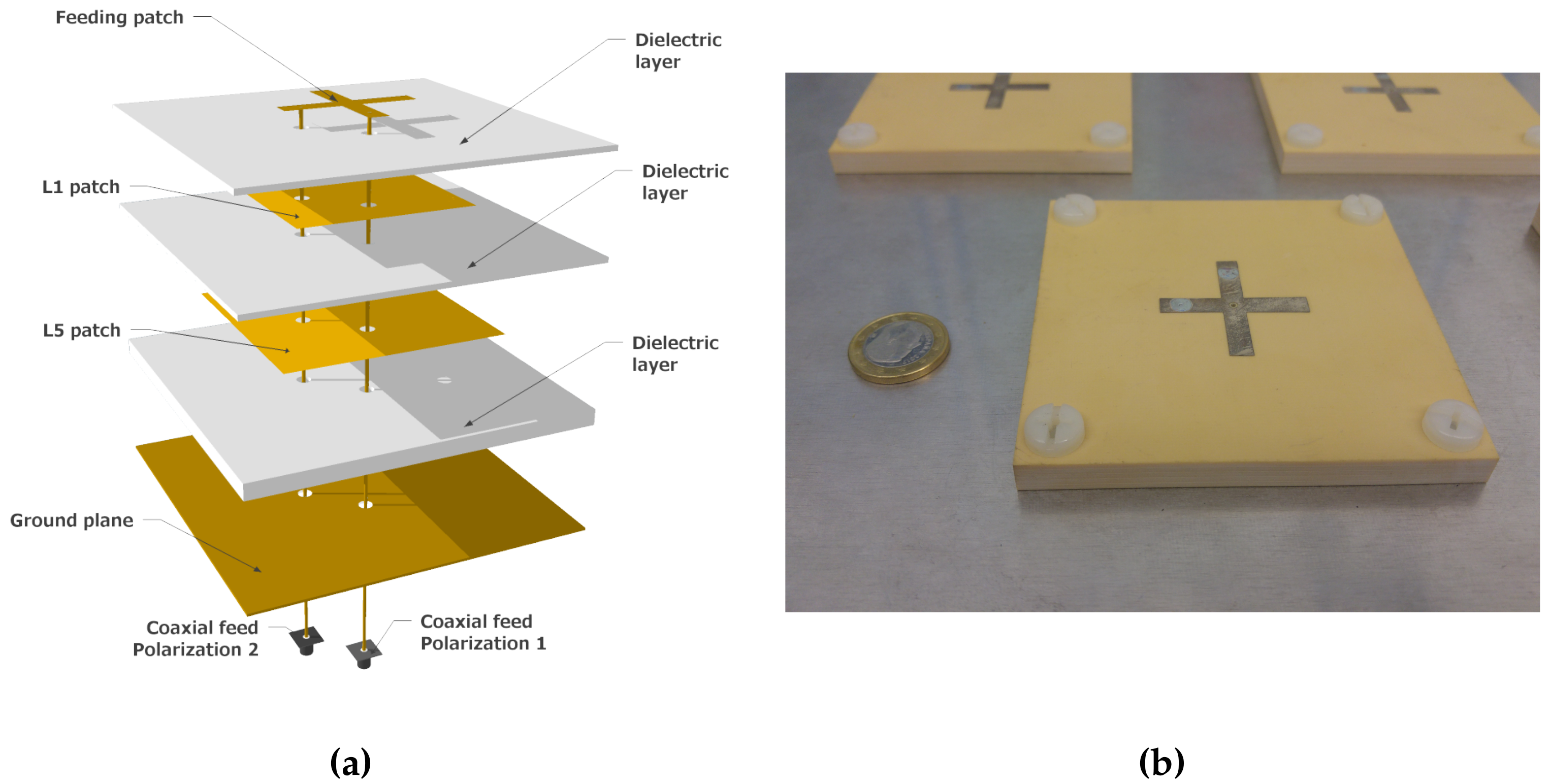
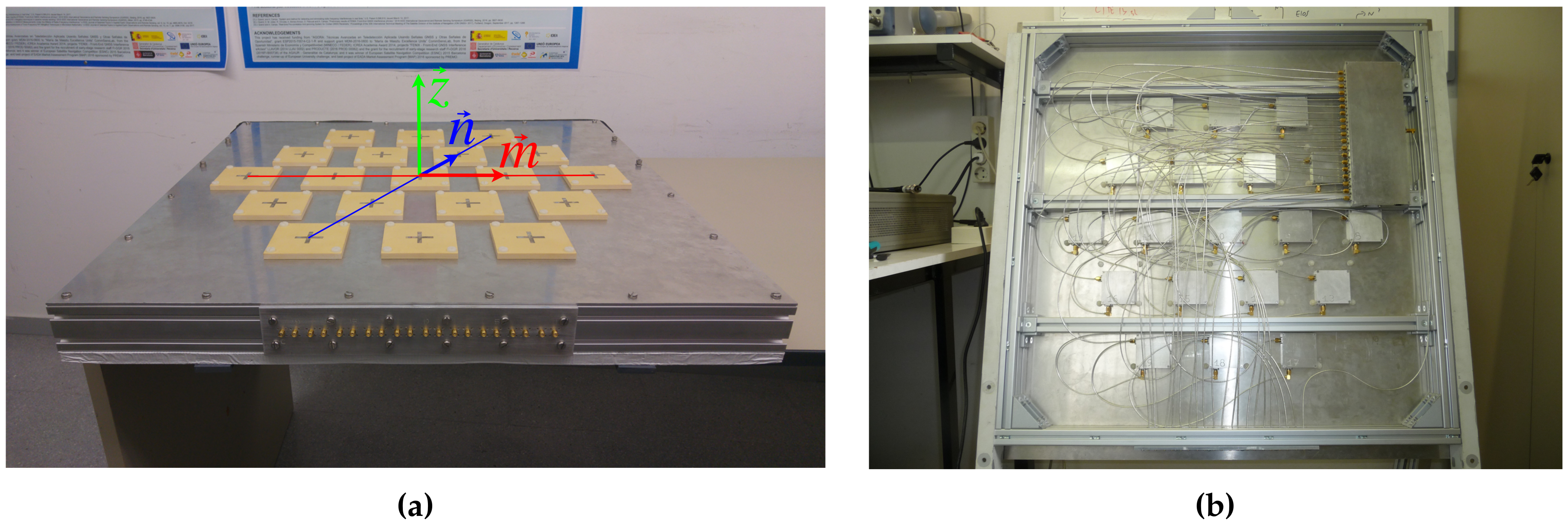
2.1. Antenna Array and RF Front-Ends
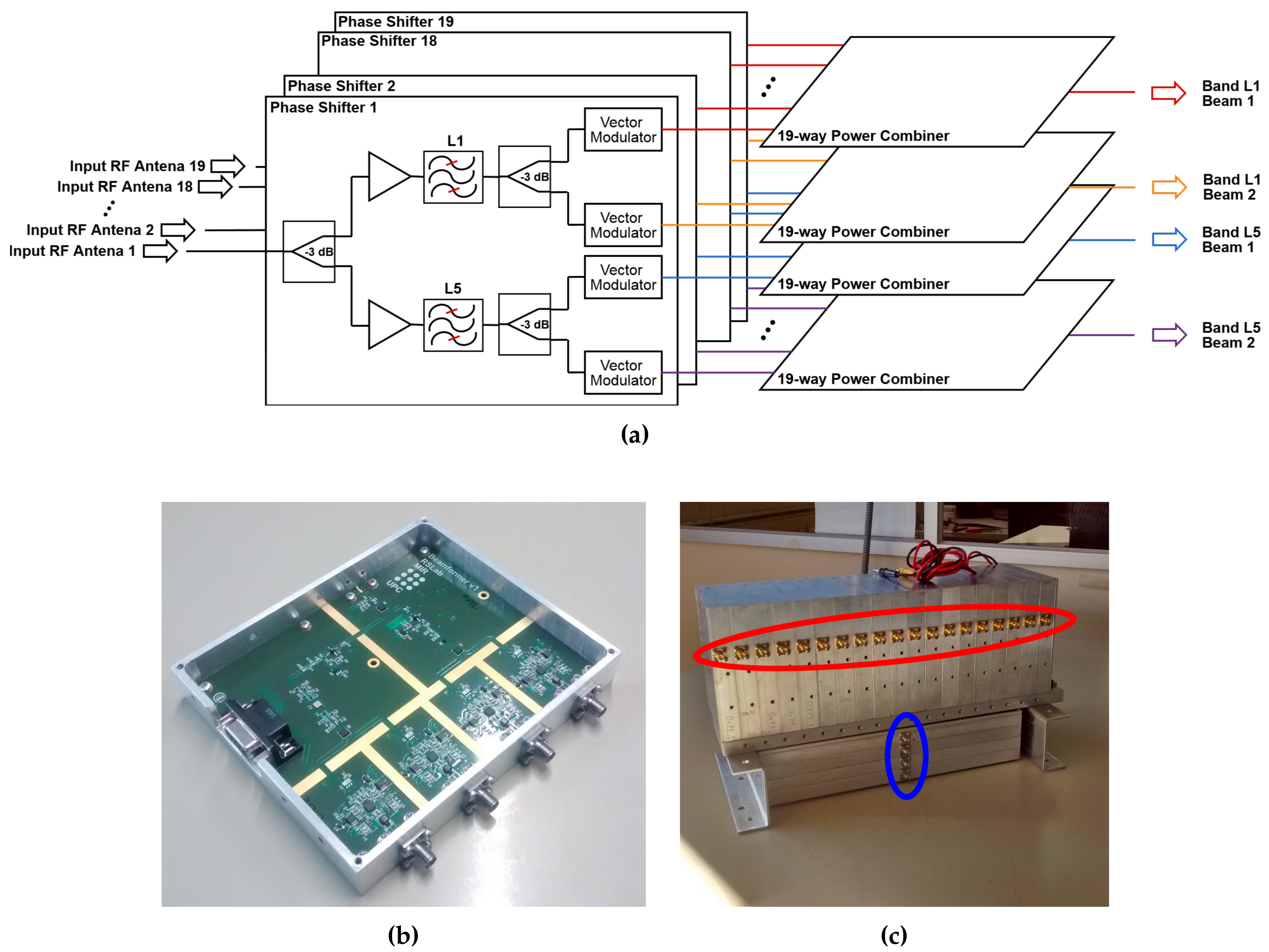
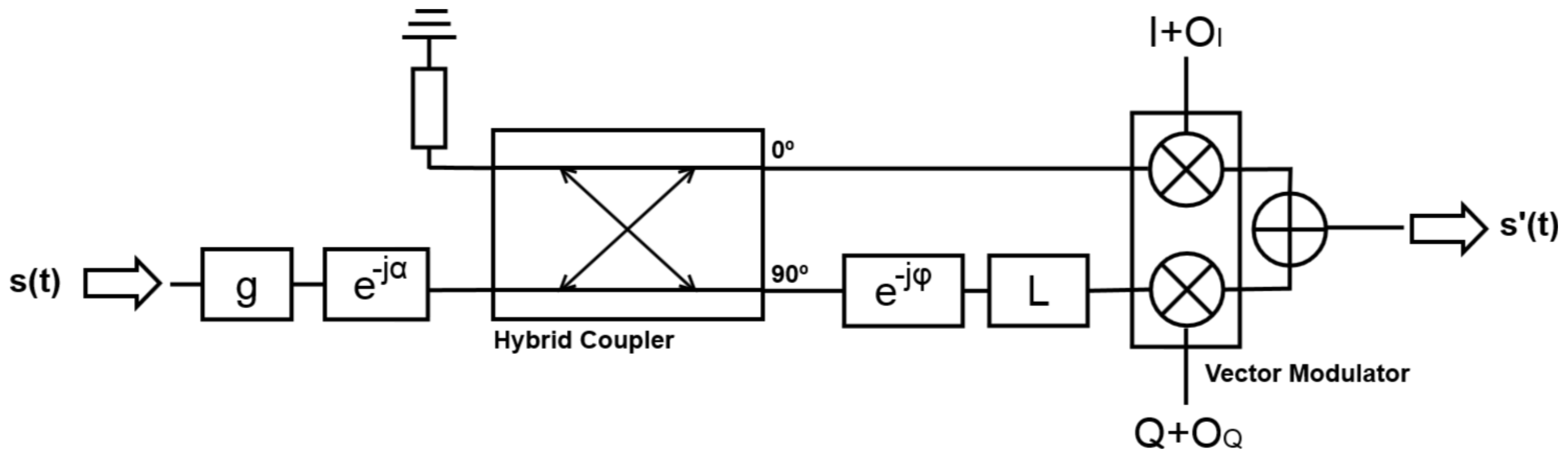
2.2. Beamformer
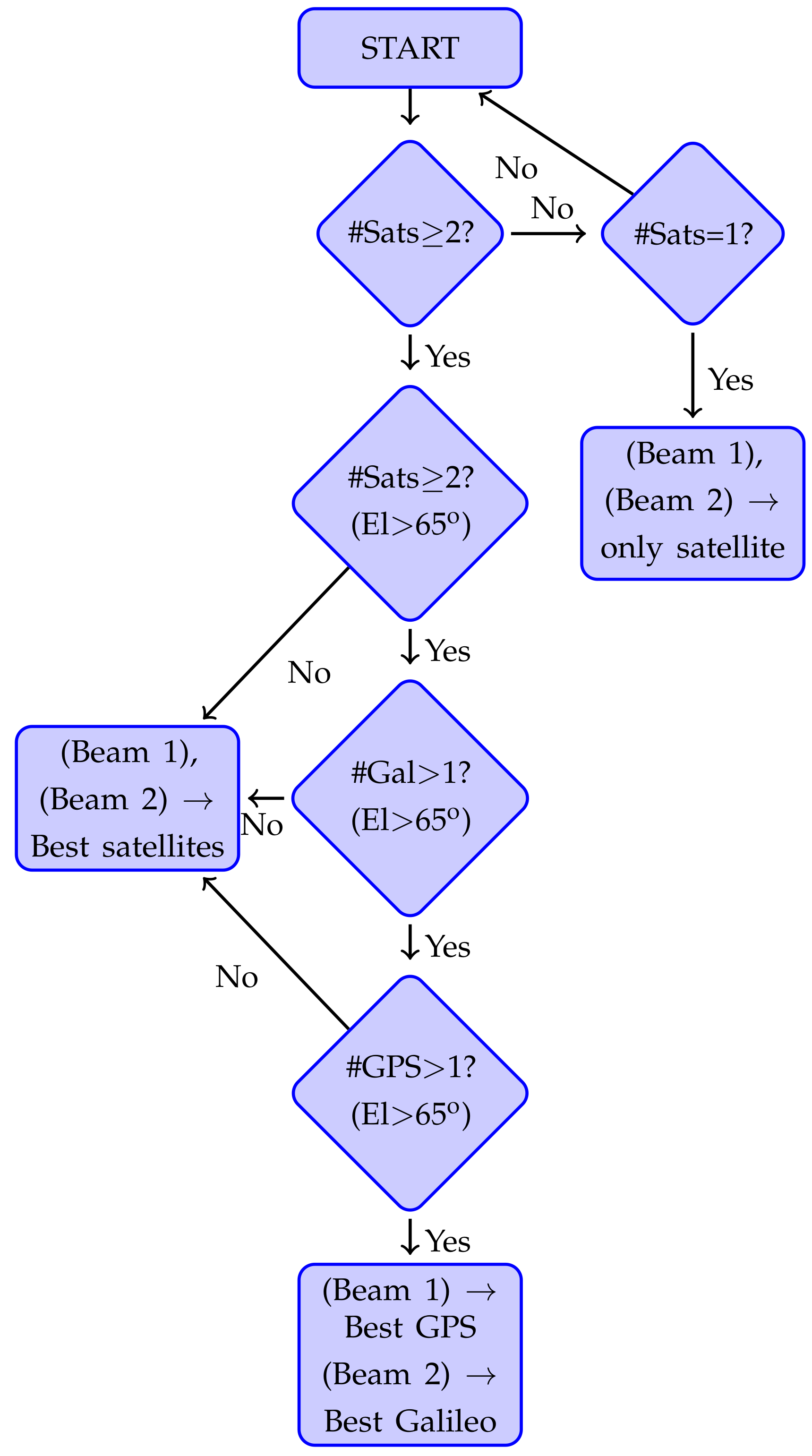
2.3. Beam-Steering Control
2.4. Data Sampling and Processing
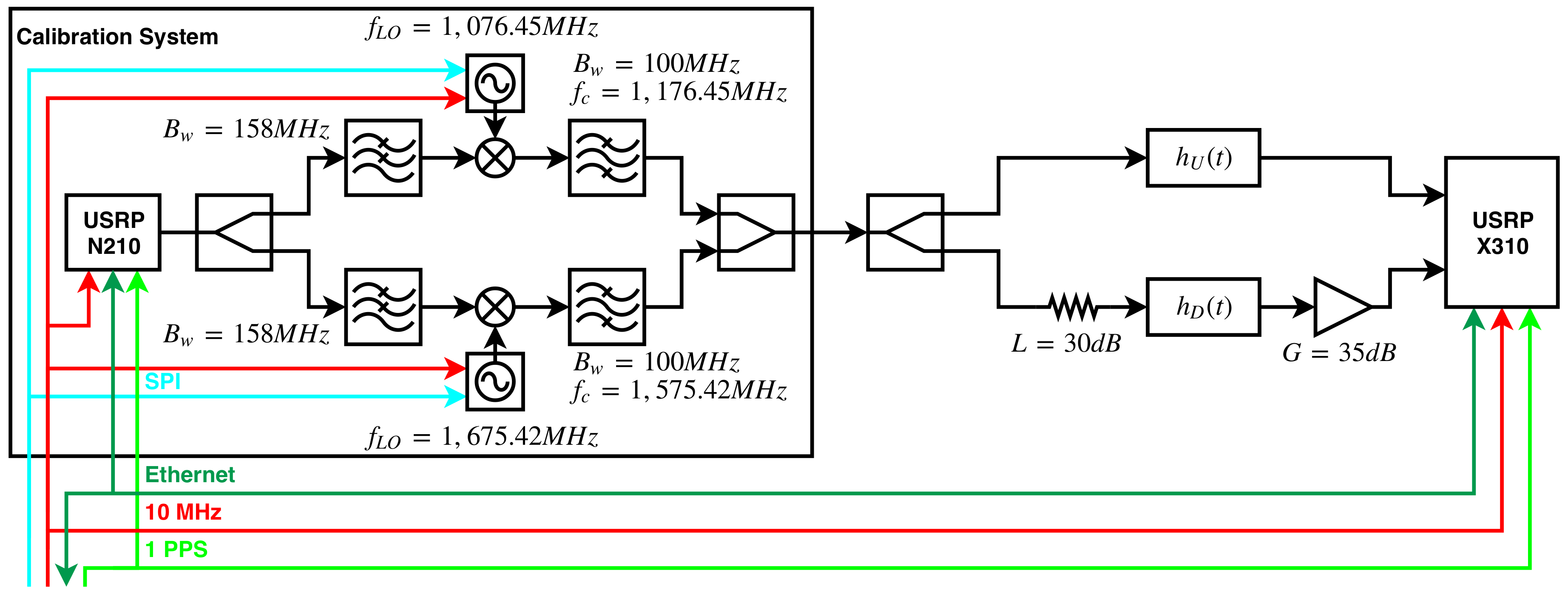
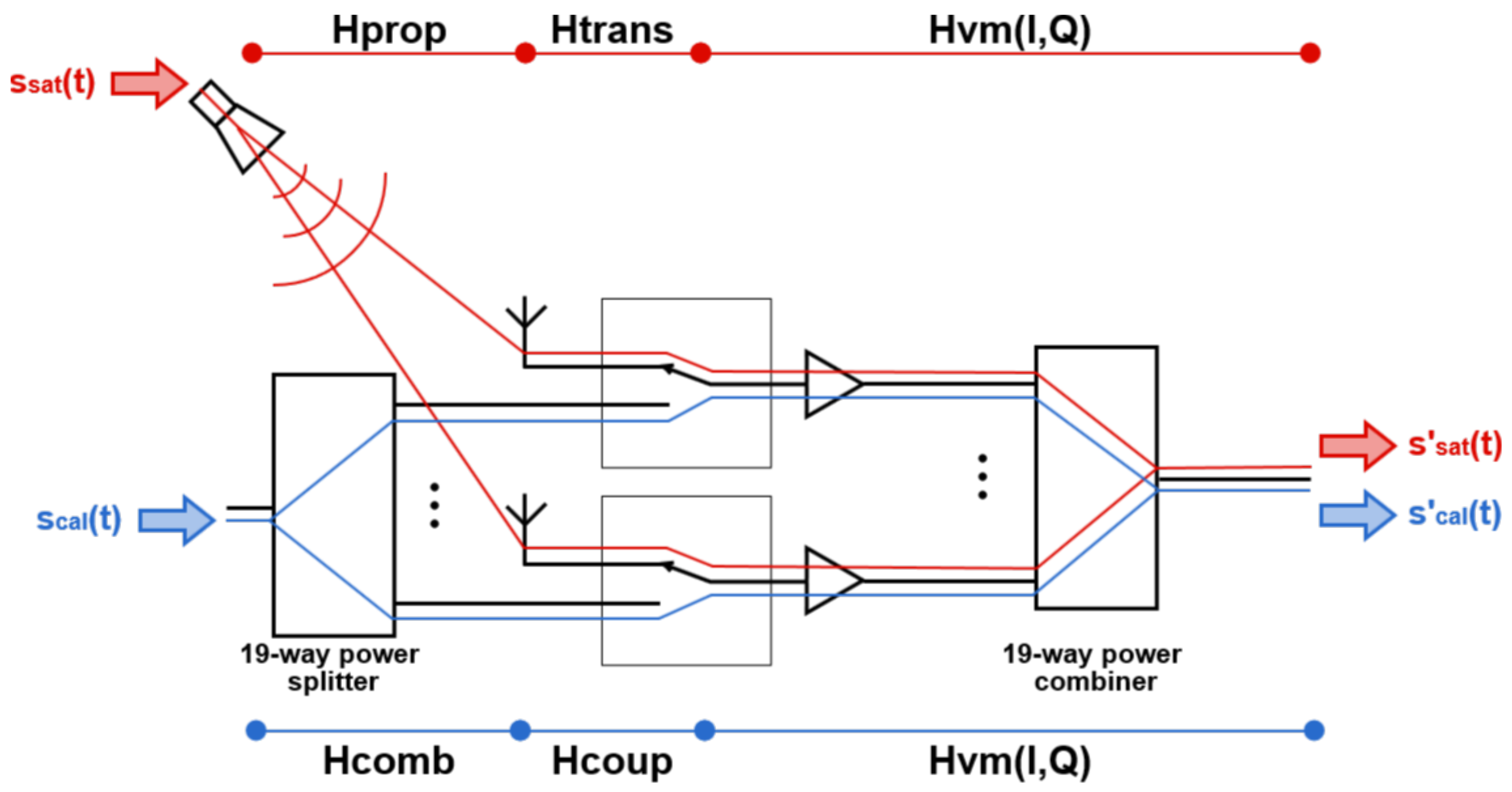
2.5. Calibration System
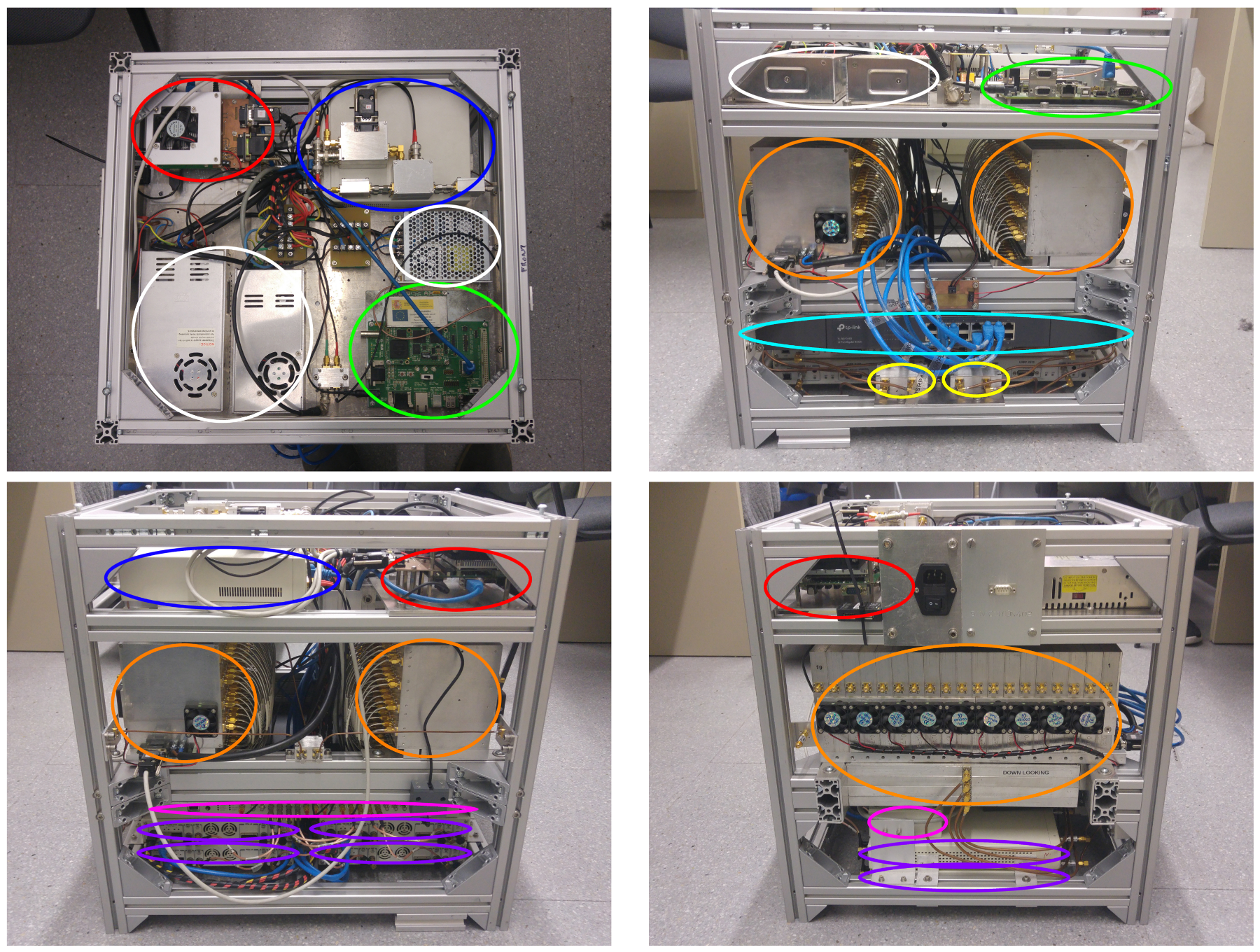
2.6. Instrument Integration
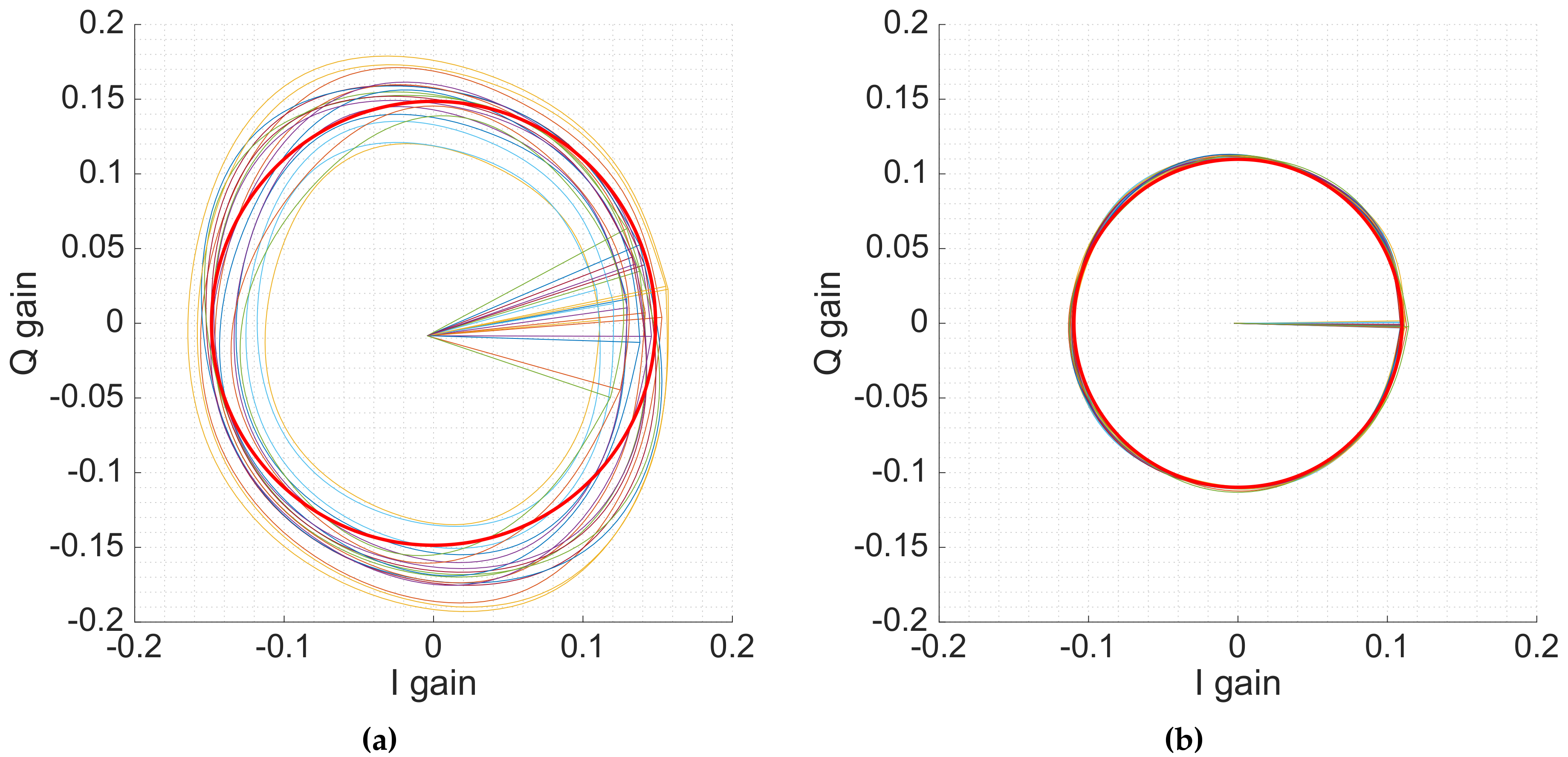
3. Instrument Calibration
3.1. Pre-Calibration
3.1.1. Step 1: Calibration through the Antenna
3.1.2. Step 2: Calibration through the Calibration Port
3.1.3. Step 3: Obtaining the Compensation Parameters
3.1.4. Step 4: Re-Calibrating the Instrument
3.2. In-Flight Calibration
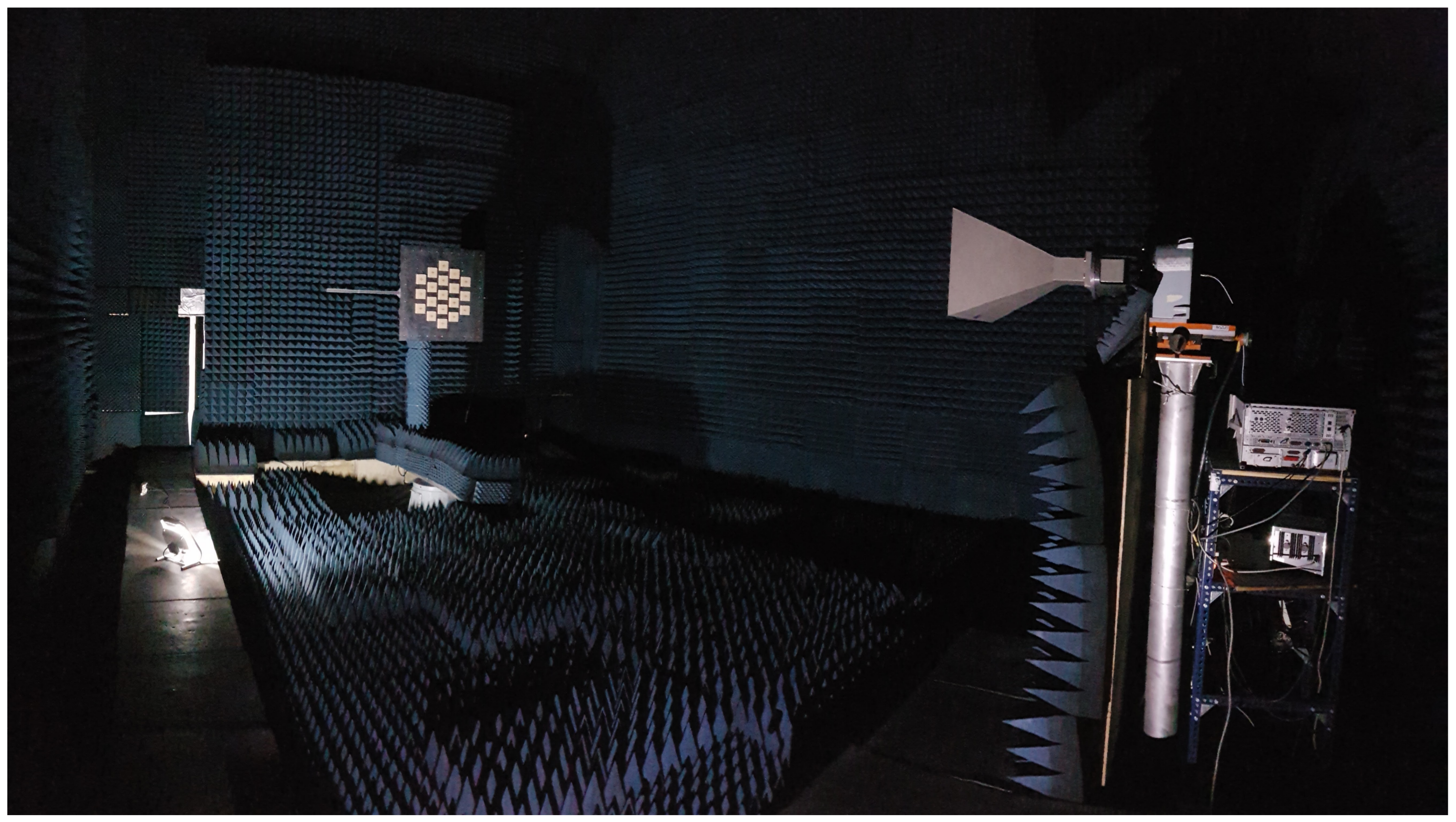
4. Validation Results
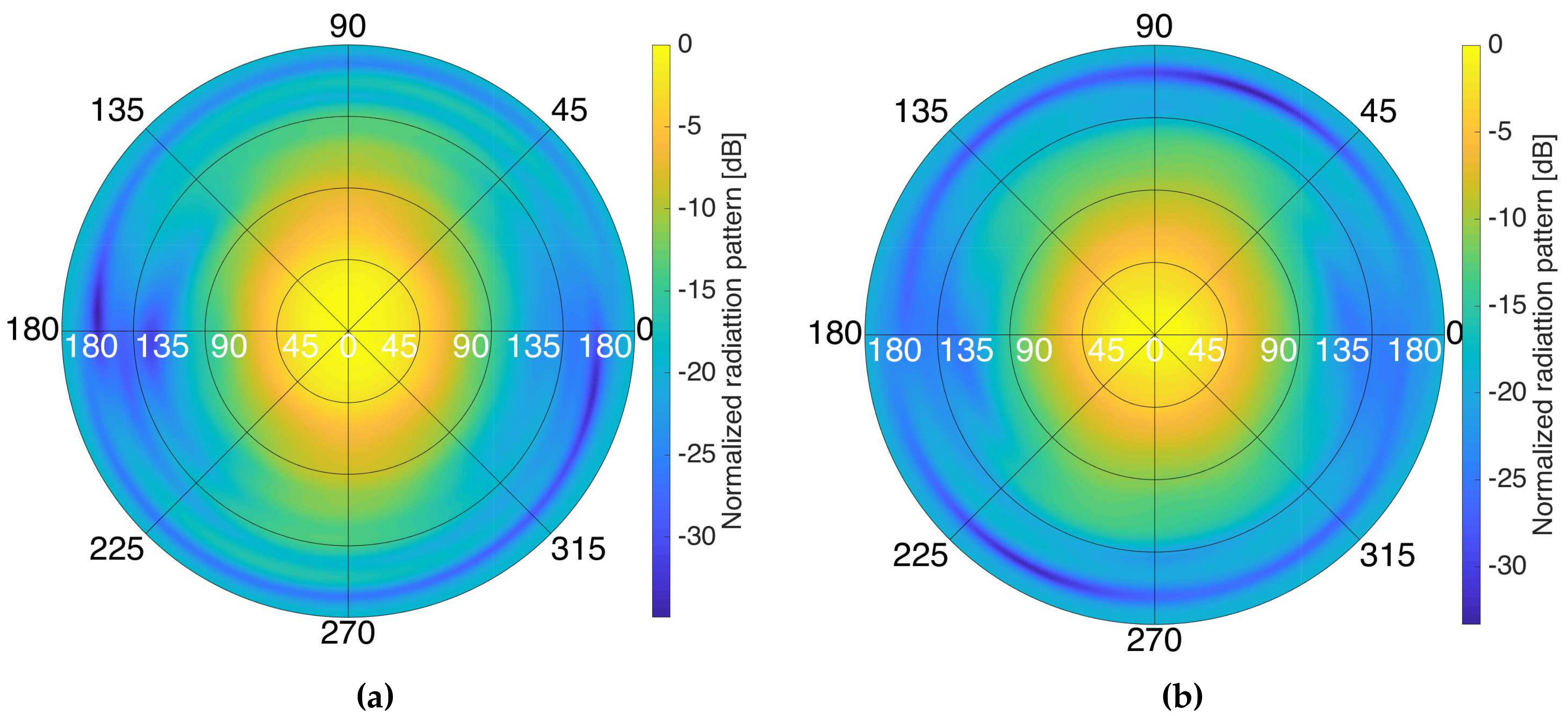
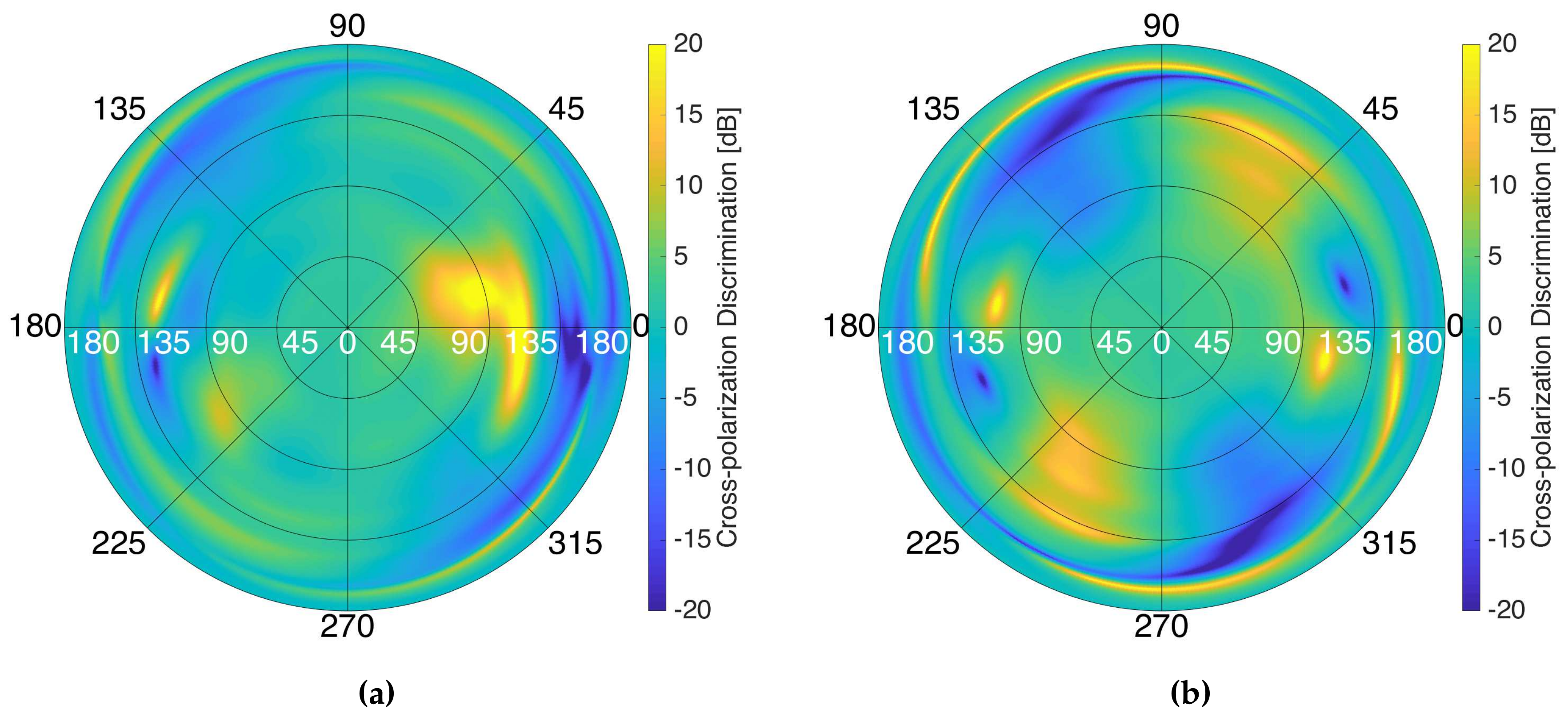
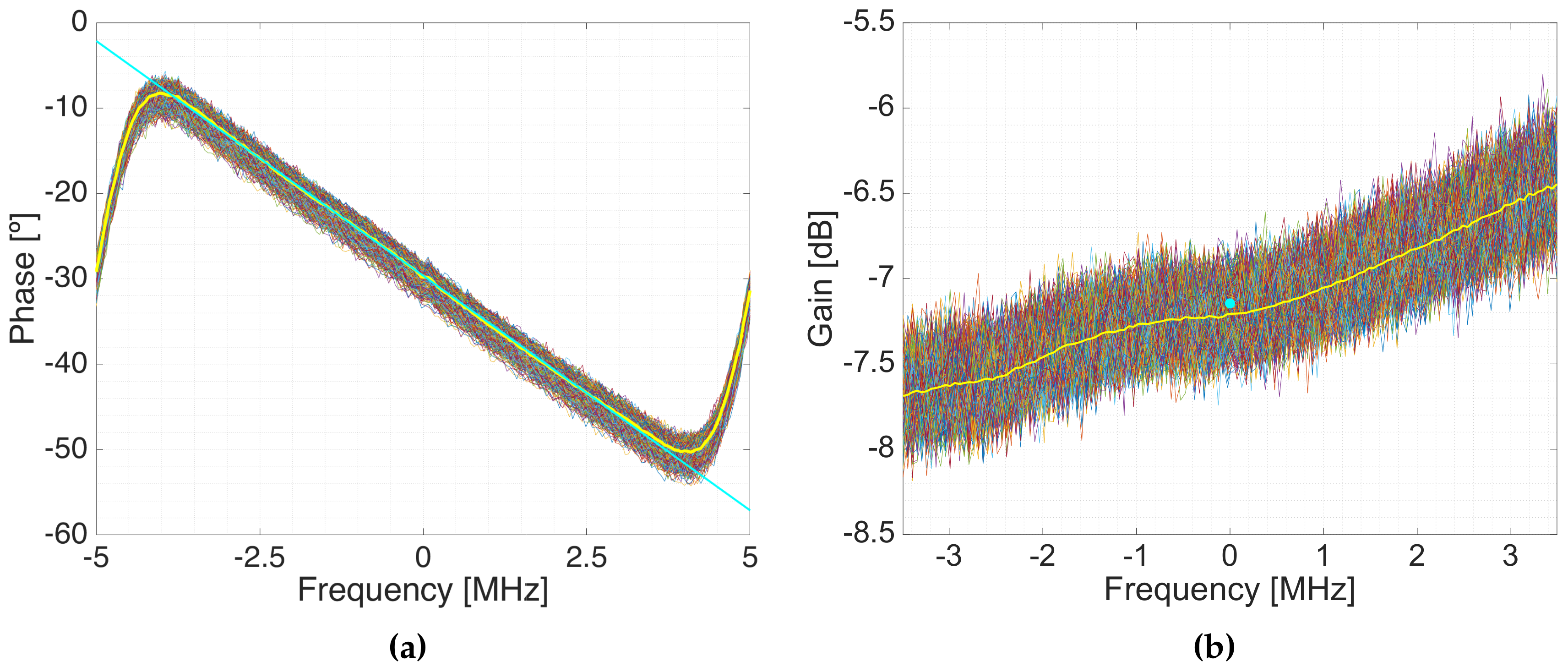
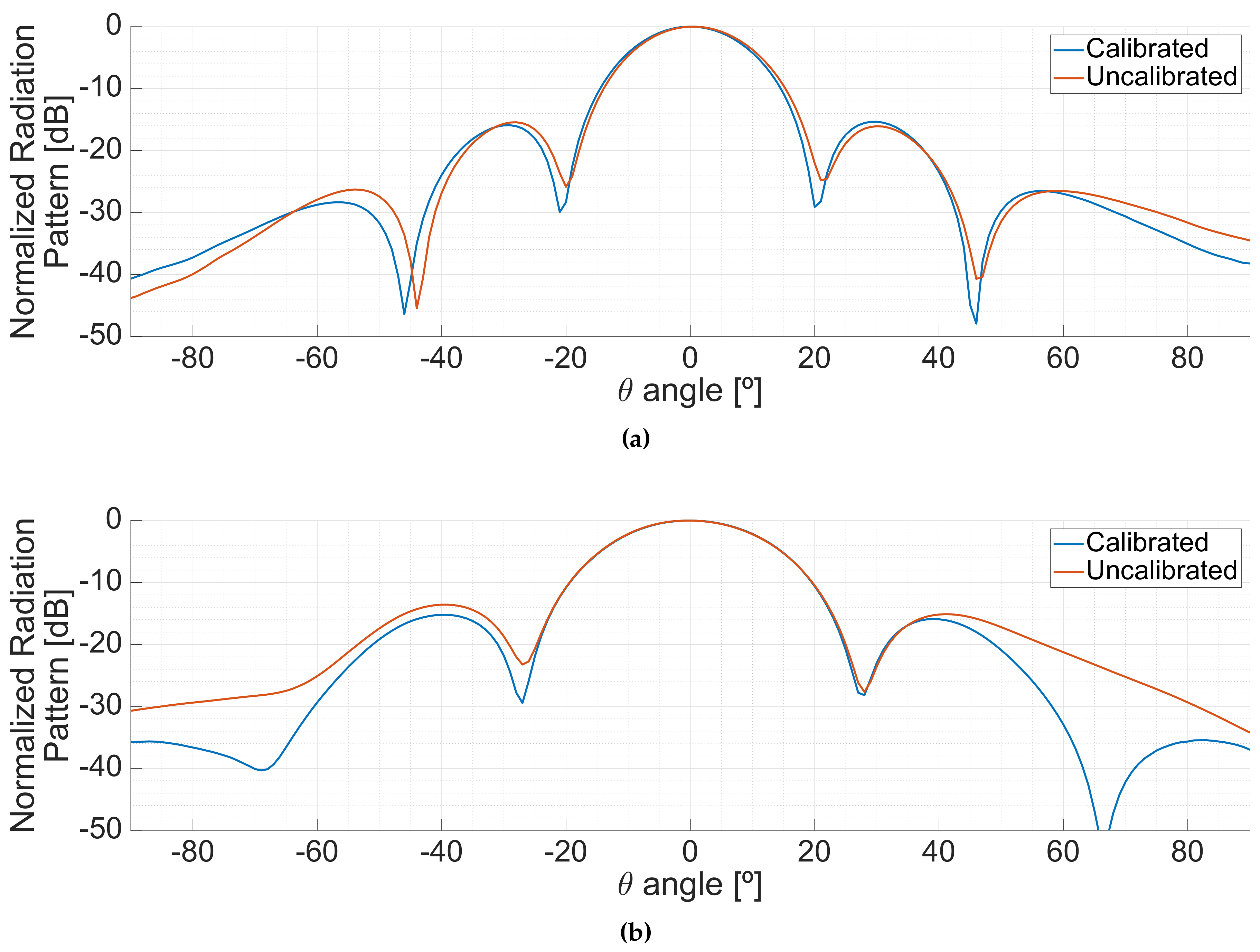
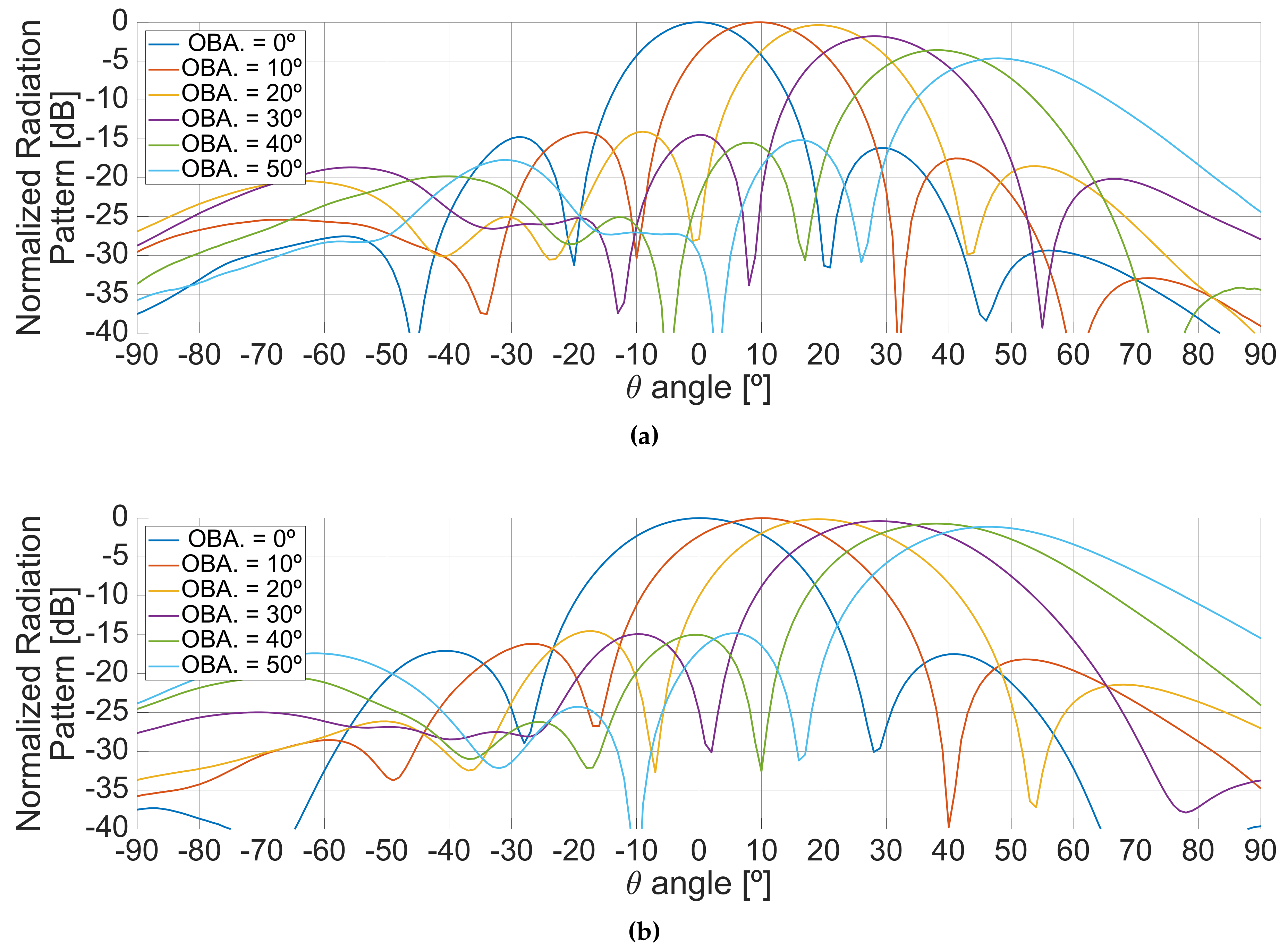
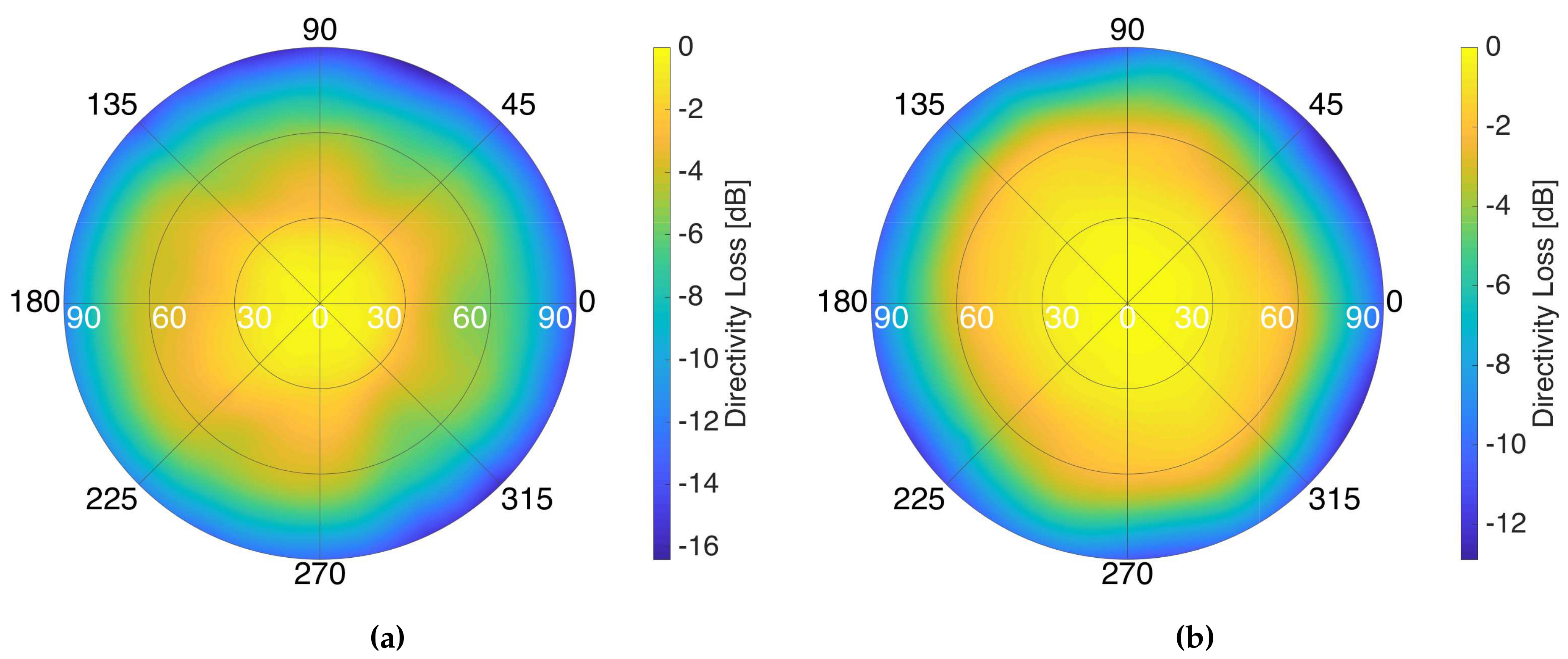
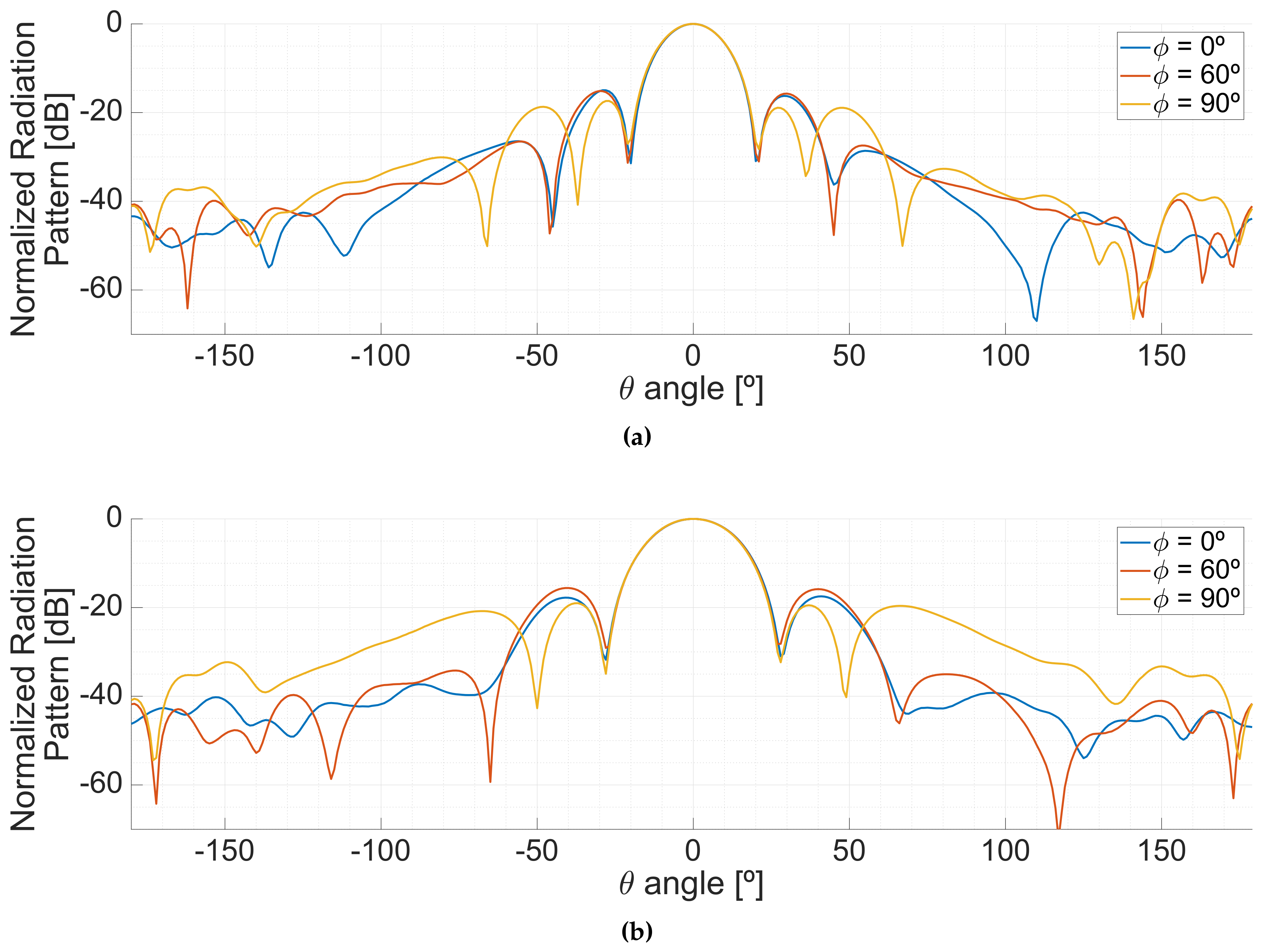
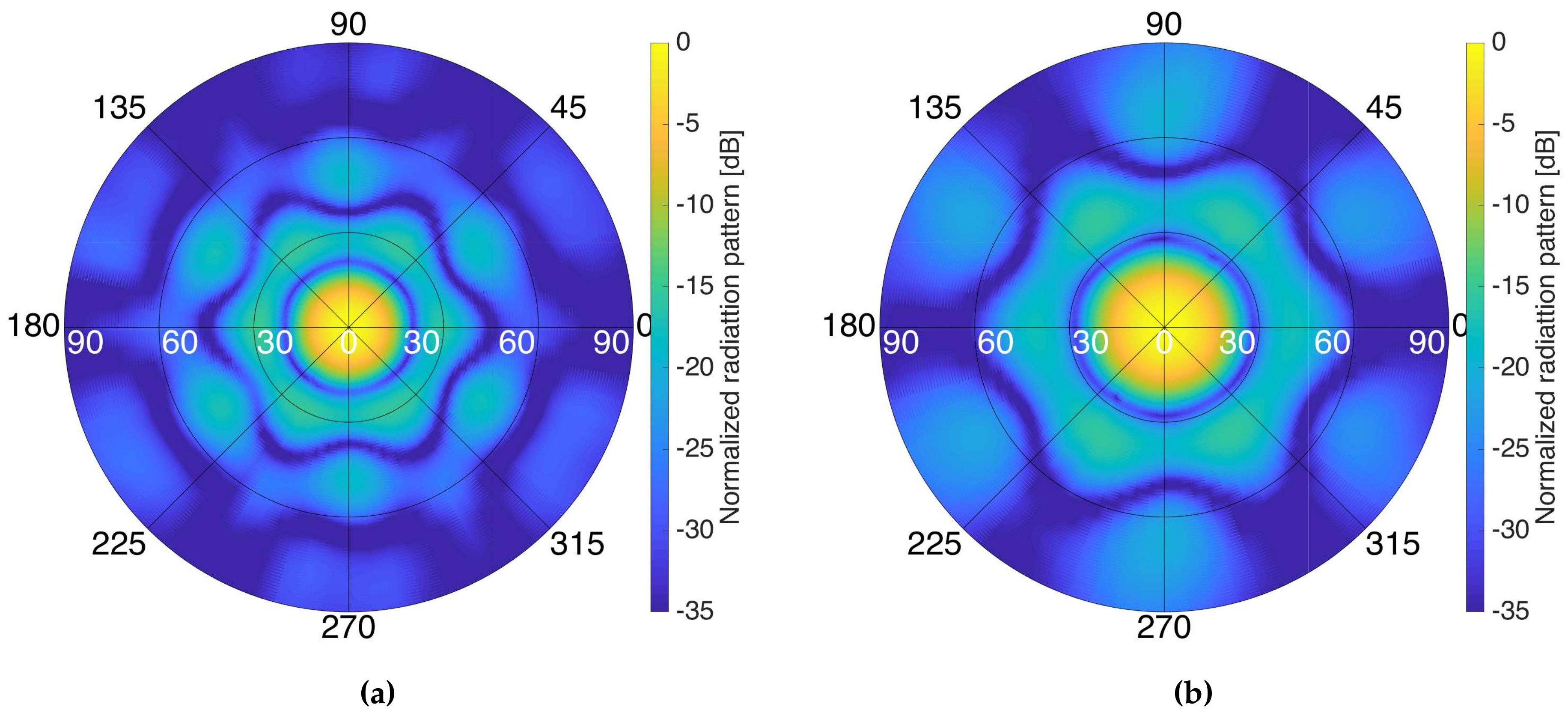
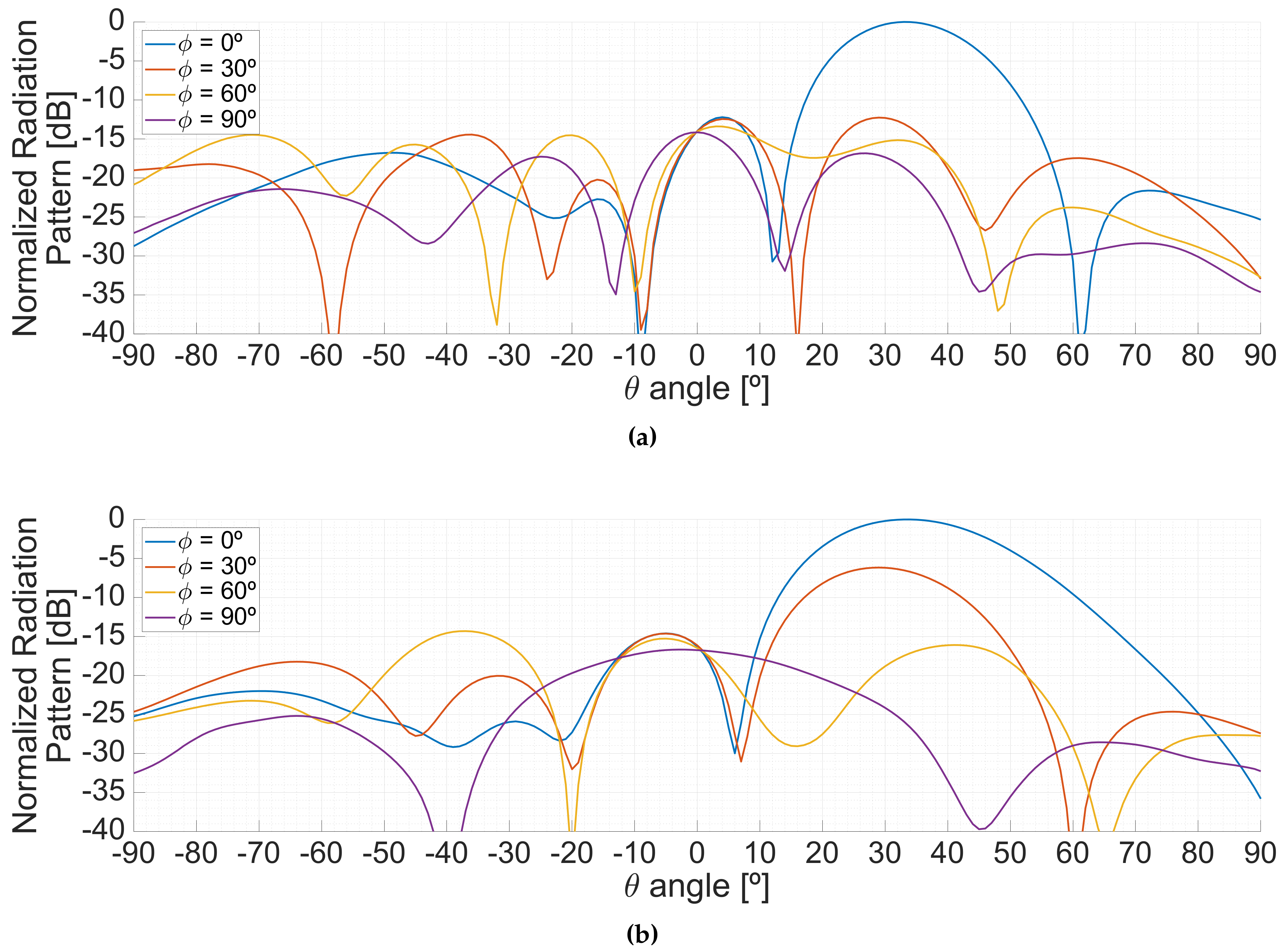
4.1. Calibration Impact and Measured Radiation Patterns
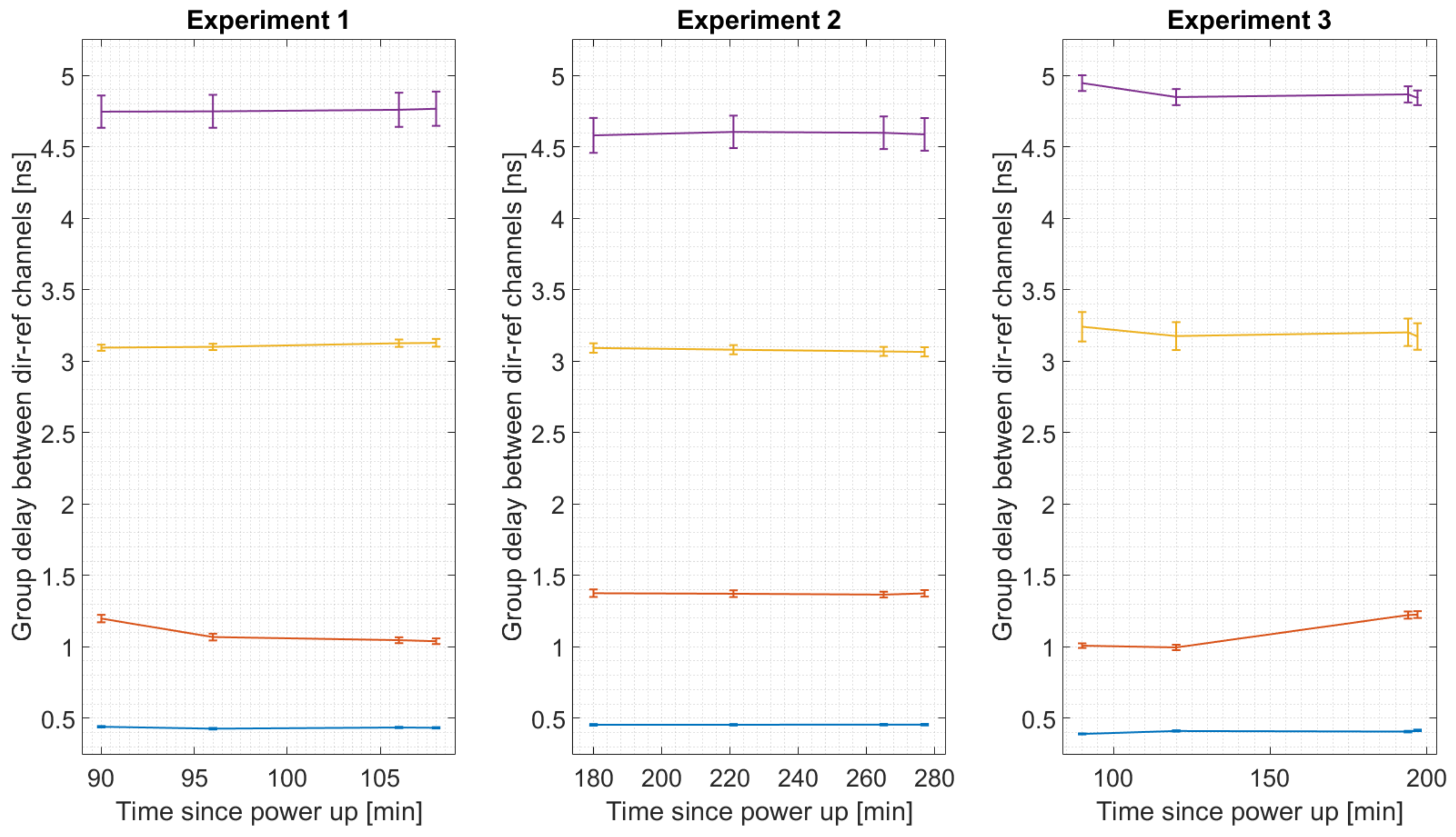
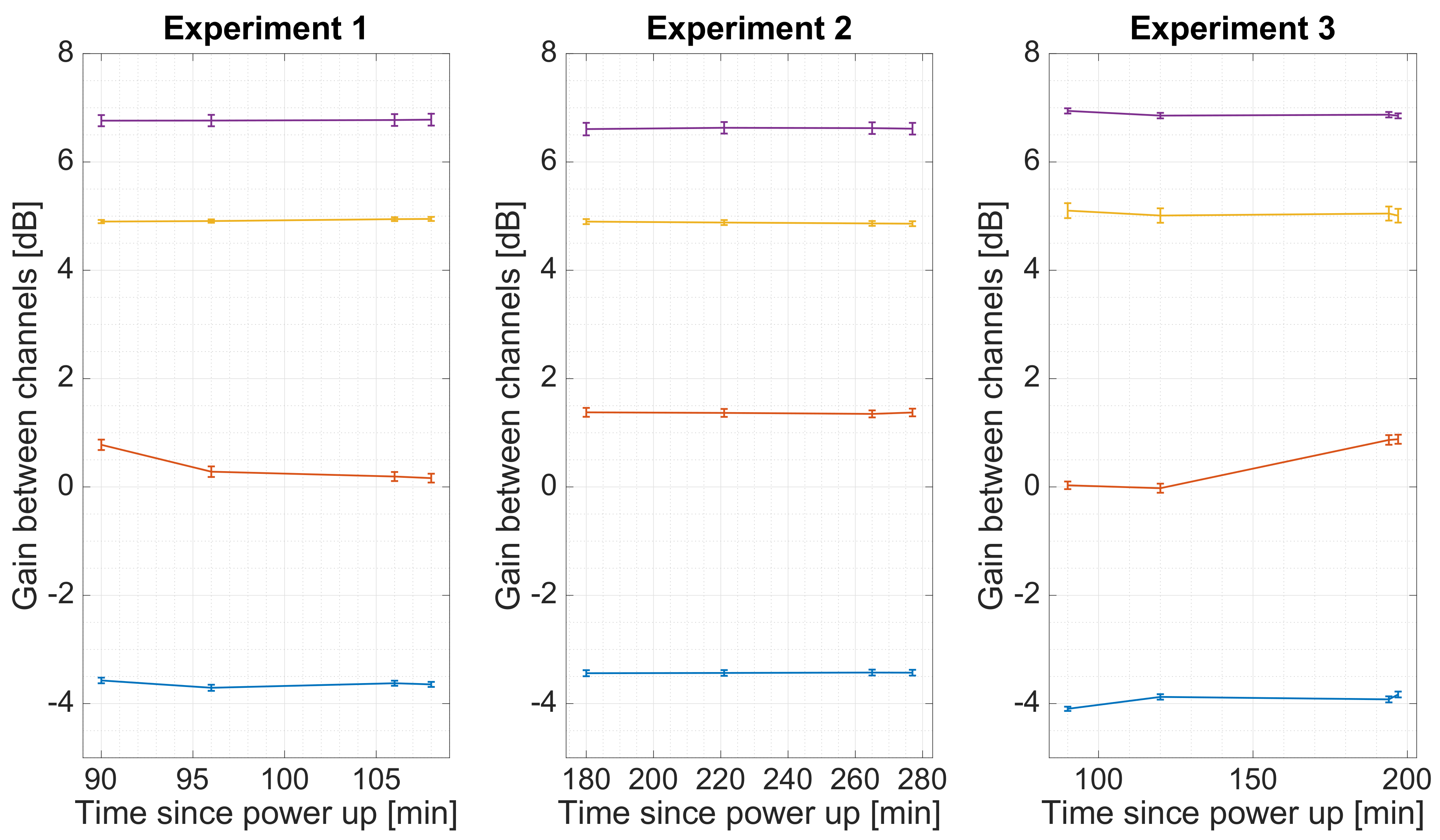
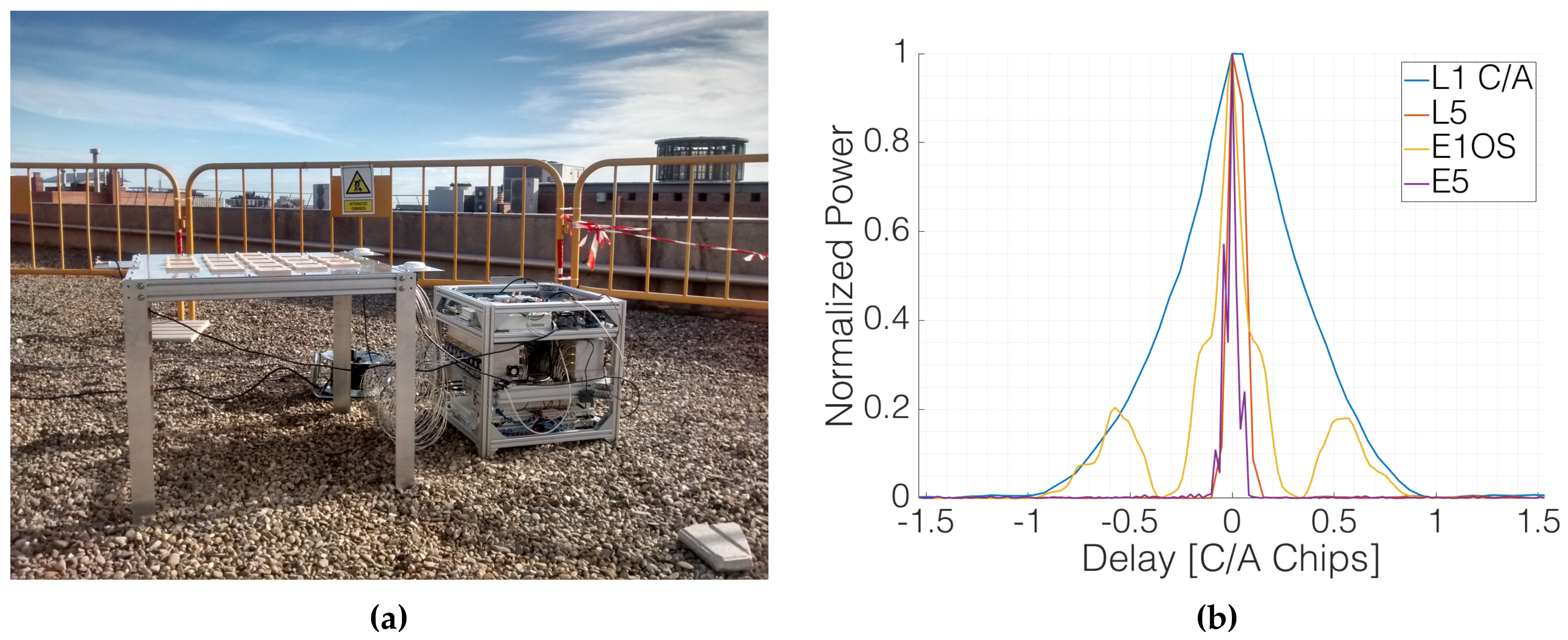
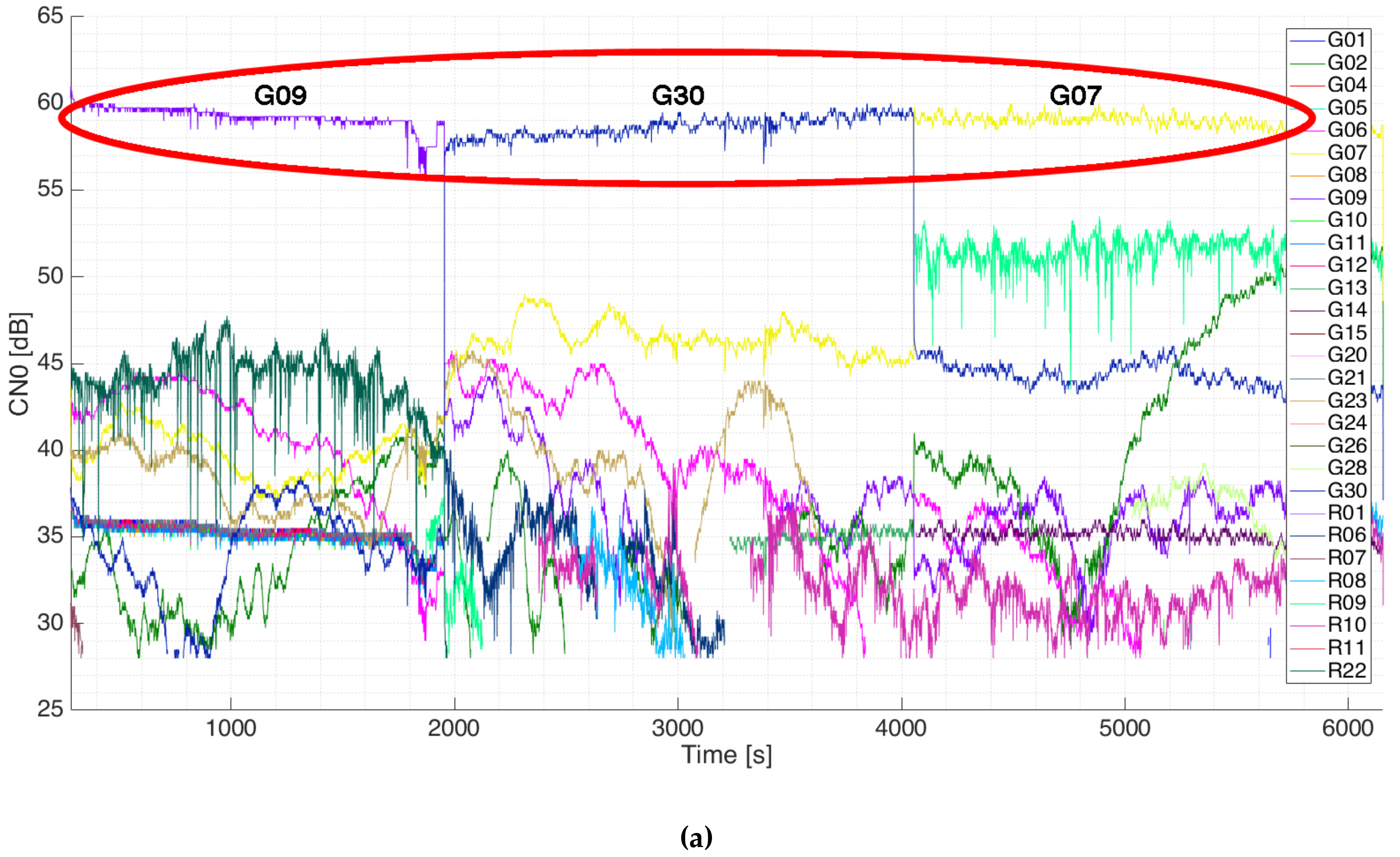
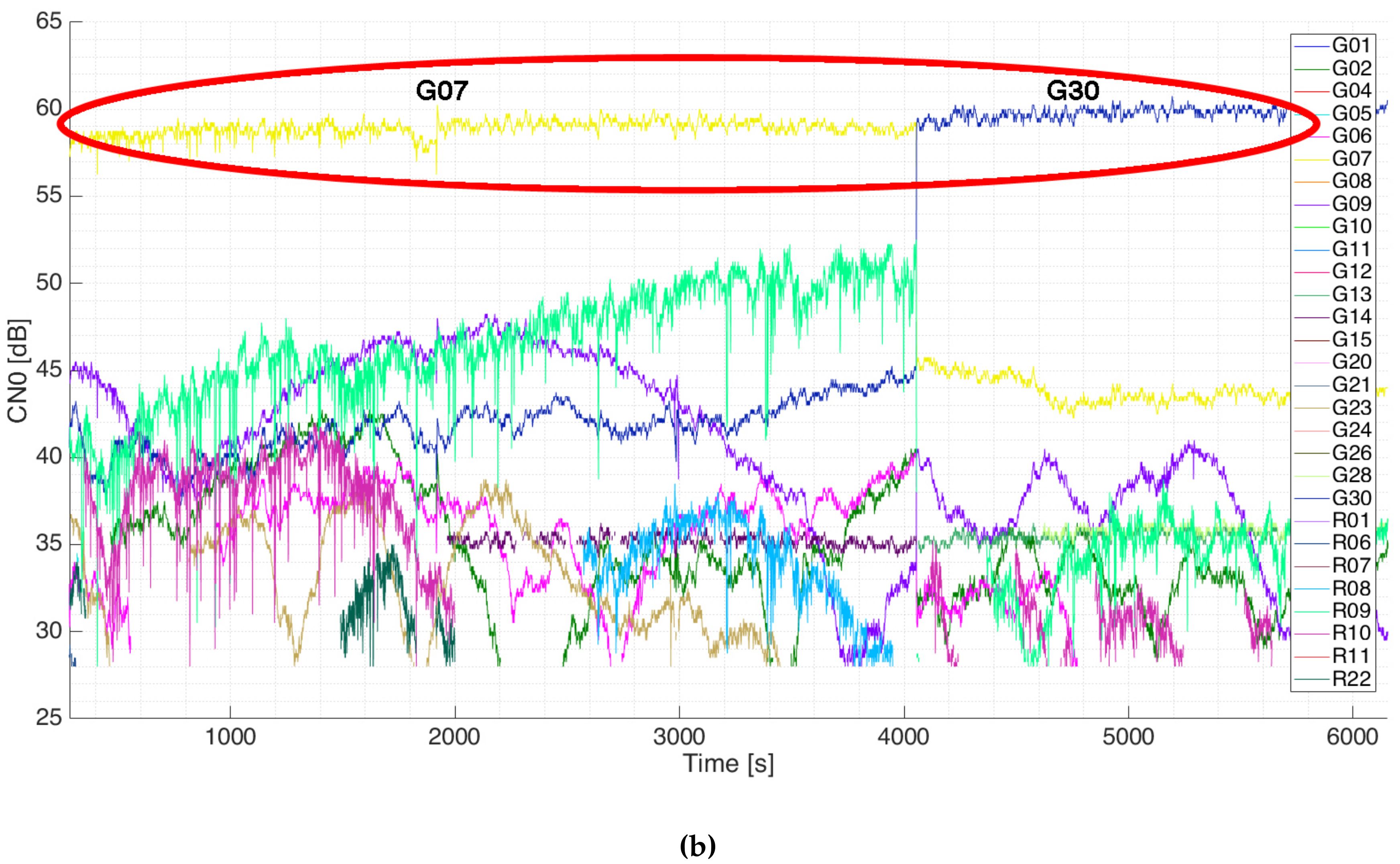
4.2. Outdoor Experiments
5. Summary
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ADC | Analog-to-Digital Converter |
| BPSK | Binary Phase Shifting Keying |
| −3 dB Bandwidth | |
| cGNSS-R | conventional Global Navigation Satellite Systems—Reflectometry |
| COTS | Commercial Off-The-Shelf |
| DAC | Digital-to-Analog Converter |
| DCM | Direction Cosine Matrix |
| DUT | Device Under Test |
| ECEF | Earth Centered Earth Fixed |
| Cut-off frequency at −3 dB | |
| LO frequency | |
| FM | Frequency Modulation |
| G | Gain |
| GEROSS-ISS | GNSS rEflectometry, Radio Occultation and Scatterometry onboard the International Space Station |
| GLONASS | GLObalnaya NAvigatsionnaya Sputnikovaya Sistema |
| GNSS | Global Navigation Satellite Systems |
| GNSS-R | Global Navigation Satellite Systems—Reflectometry |
| GPS | Global Positioning System |
| GPS-DO | GPS Disciplined Oscillator |
| GSM | Global System for Mobile communications |
| G-TERN | GNSS Transpolar Earth Reflectometry exploriNg system |
| I | In-phase component |
| IF | Intermediate Frequency |
| iGNSS-R | interferometric Global Navigation Satellite Systems—Reflectometry |
| IMU | Inertial Measurement Unit |
| L | Losses, attenuation |
| LHCP | Left Hand Circular Polarized |
| LNA | Low Noise Amplifier |
| LO | Local Oscillator |
| MIR | Microwave Interferometric Reflectometer |
| Msps | Mega Samples Per Second |
| NED | North East Down |
| NF | Noise Figure |
| PARIS-IoD | PAssive Reflectometry and Interferometry System In-orbit Demonstration |
| PPS | Pulse Per Second |
| PRN | PseudoRandom Noise |
| Q | Quadrature phase component |
| RF | Radio Frequency |
| RFI | Radio Frequency Interference |
| RMS | Root Mean Square |
| RHCP | Right Hand Circular Polarized |
| SAW | Surface Acoustic Wave |
| SBAS | Satellite-Based Augmentation Systems |
| SDR | Software Defined Radio |
| SNR | Signal-to-Noise Ratio |
| Chip time of a PRN code | |
| Coherent integration time | |
| PRN time length | |
| USRP | Universal Software Radio Peripheral |
| VNA | Vector Network Analyzer |
| Wavelength of GPS at L1 central frequency (19.04 cm) | |
| Wavelength of GPS at L5 central frequency (25.5 cm) |
Appendix A. Formulas Used in the Derivation of the Cross-Correlation Function for the Calibration Process
References
- Hall, C.; Cordey, R. Multistatic Scatterometry. In Proceedings of the International Geoscience and Remote Sensing Symposium: Remote Sensing: Moving Toward the 21st Century, Edinburg, UK, 12–16 September 1988; Volume 1, pp. 561–562. [Google Scholar]
- Martin-Neira, M. A Passive Reflectometry and Interferometry System (PARIS): Application to Ocean Altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Onrubia, R.; Querol, J.; Pascual, D.; Alonso-Arroyo, A.; Park, H.; Camps, A. DME/TACAN Impact Analysis on GNSS Reflectometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4611–4620. [Google Scholar] [CrossRef]
- Pascual, D.; Park, H.; Onrubia, R.; Arroyo, A.A.; Querol, J.; Camps, A. Crosstalk Statistics and Impact in Interferometric GNSS-R. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4621–4630. [Google Scholar] [CrossRef]
- Katzberg, S.; Garrison, J. Utilizing GPS To Determine Ionospheric Delay over the Ocean; NASA Technical Memorandum 4750; NASA: Greenbelt, MD, USA, 1996. [Google Scholar]
- European Union. European GNSS (Galileo) Open Service Signal-In-Space Interface Control Document (OS SIS ICD); Technical Report; European Union: Brussels, Belgium, 2014. [Google Scholar]
- Pascual, D.; Camps, A.; Martin, F.; Park, H.; Arroyo, A.A.A.; Onrubia, R. Precision Bounds in GNSS-R Ocean Altimetry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1416–1423. [Google Scholar] [CrossRef]
- Onrubia, R.; Camps, A. Antena Multibanda Tipo Parche con Sistema de Alimentación Cruzada. Spain Patent ES2540161B2, 8 October 2015. [Google Scholar]
- Alonso-Arroyo, A.; Camps, A.; Monerris, A.; Rudiger, C.; Walker, J.P.; Onrubia, R.; Querol, J.; Park, H.; Pascual, D. On the Correlation Between GNSS-R Reflectivity and L-Band Microwave Radiometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5862–5879. [Google Scholar] [CrossRef]
- Analog Devices ADL5390 Rev. A. Available online: http://www.analog.com/media/en/technical-documentation/data-sheets/ADL5390.pdf (accessed on 6 September 2018).
- Wandboard Quad (I.MX6). Available online: https://www.wandboard.org/products/wandboard/WB-IMX6Q-BW/ (accessed on 25 October 2018).
- Trimble BD982. Available online: https://www.trimble.com/gnss-inertial/bd982.aspx (accessed on 8 January 2018).
- Onrubia, R.; Garrucho, L.; Pascual, D.; Park, H.; Querol, J.; Alonso-Arroyo, A.; Camps, A. Advances in the MIR instrument: Integration, control subsystem and analysis of the flight dynamics for beamsteering purposes. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; Volume 2015, pp. 4765–4768. [Google Scholar]
- GPS. NAVSTAR GPS Control Segment to User Support Community Interfaces; ICD-GPS-870; Interface Control Working Group, Navstar GPS Joint Program Office: El Segundo, CA, USA, 2013. [Google Scholar]
- Seika NG-4. Available online: http://www.seika.de/english/htmle/NGe.htm (accessed on 7 November 2018).
- 9 Degrees of Freedom—Razor IMU. Available online: https://www.sparkfun.com/products/retired/10736 (accessed on 25 October 2018).
- Ettus Research USRP X310. Available online: https://www.ettus.com/content/files/X300_X310_Spec_Sheet.pdf (accessed on 6 September 2018).
- Ettus Research Octoclock. Available online: https://www.ettus.com/content/files/Octoclock_Spec_Sheet.pdf (accessed on 6 September 2018).
- Proakis, J.G.; Manolakis, D.G. Digital Signal Processing Principles, Algorithms and Applications; Pearson: San Antonio, TX, USA, 1996. [Google Scholar]
- Zavorotny, V.U.; Gleason, S.; Cardellach, E.; Camps, A. Tutorial on remote sensing using GNSS bistatic radar of opportunity. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–45. [Google Scholar] [CrossRef]
- Querol, J. Radio Frequency Interference Detection and Mitigation Techniques for Navigation and Earth Observation. Ph.D. Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2018; pp. 196–200. [Google Scholar]
- Camps, A.; Park, H.; Valencia i Domenech, E.; Pascual, D.; Martin, F.; Rius, A.; Ribo, S.; Benito, J.; Andres-Beivide, A.; Saameno, P.; et al. Optimization and Performance Analysis of Interferometric GNSS-R Altimeters: Application to the PARIS IoD Mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1436–1451. [Google Scholar] [CrossRef]
- Onrubia, R.; Pascual, D.; Querol, J.; Park, H.; Camps, A.; Rudiger, C.; Walker, J. Preliminary End-to-End Results of the MIR Instrument: the Microwave Interferometric Reflectometer. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 2027–2030. [Google Scholar]
- Onrubia, R.; Pascual, D.; Querol, J.; Park, H.; Camps, A. Beamformer characterization of the MIR instrument: The microwave interferometric reflectometer. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; Volume 2017, pp. 5026–5029. [Google Scholar]
- Martin-Neira, M.; D’Addio, S.; Buck, C.; Floury, N.; Prieto-Cerdeira, R. The PARIS Ocean Altimeter In-Orbit Demonstrator. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2209–2237. [Google Scholar] [CrossRef]
- Wickert, J.; Andersen, O.; Beyerle, G.; Chapron, B.; Cardellach, E.; D’Addio, S.; Foerste, C.; Gommenginger, C.; Gruber, T.; Helm, A.; et al. GEROS-ISS: Innovative GNSS Reflectometry/Occultation Payload Onboard the International Space Station for the Global Geodetic Observing System; American Geophysical Union: Washington, DC, USA, 2013. [Google Scholar]
- Cardellach, E.; Wickert, J.; Baggen, R.; Benito, J.; Camps, A.; Catarino, N.; Chapron, B.; Dielacher, A.; Fabra, F.; Flato, G.; et al. GNSS Transpolar Earth Reflectometry exploriNg System (G-TERN): Mission Concept. IEEE Access 2018, 6, 13980–14018. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency Band | Directivity | Efficiency |
|---|---|---|
| L5/E5a | 7.8 dB | 80% |
| E5 | 8 dB | 70% |
| L1/E1 | 7 dB | 65% |
| Frequency Band | Up-Looking Array | Down-Looking Array |
|---|---|---|
| L1/E1 | 20.3 dB | 20.4 dB |
| L5/E5b | 18.2 dB | 18.1 dB |
| Uncalibrated | Calibrated | |||||||
|---|---|---|---|---|---|---|---|---|
| Beamformer Error | Array Directivity Loss | Beamformer Error | Array Directivity Loss | |||||
| L1/E1 | L5/E5 | L1/E1 | L5/E5 | L1/E1 | L5/E5 | L1/E1 | L5/E5 | |
| Amplitude | 0.55 dB | 0.11 dB | 0.061 dB | 0.0027 dB | 0.02 dB | 0.03 dB | <0.001 dB | <0.001 dB |
| Phase | 13 | 16 | 0.22 dB | 0.34 dB | 4.9 | 4.2 | 0.03 dB | 0.02 dB |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Onrubia, R.; Pascual, D.; Querol, J.; Park, H.; Camps, A. The Global Navigation Satellite Systems Reflectometry (GNSS-R) Microwave Interferometric Reflectometer: Hardware, Calibration, and Validation Experiments. Sensors 2019, 19, 1019. https://doi.org/10.3390/s19051019
Onrubia R, Pascual D, Querol J, Park H, Camps A. The Global Navigation Satellite Systems Reflectometry (GNSS-R) Microwave Interferometric Reflectometer: Hardware, Calibration, and Validation Experiments. Sensors. 2019; 19(5):1019. https://doi.org/10.3390/s19051019
Chicago/Turabian StyleOnrubia, Raul, Daniel Pascual, Jorge Querol, Hyuk Park, and Adriano Camps. 2019. "The Global Navigation Satellite Systems Reflectometry (GNSS-R) Microwave Interferometric Reflectometer: Hardware, Calibration, and Validation Experiments" Sensors 19, no. 5: 1019. https://doi.org/10.3390/s19051019
APA StyleOnrubia, R., Pascual, D., Querol, J., Park, H., & Camps, A. (2019). The Global Navigation Satellite Systems Reflectometry (GNSS-R) Microwave Interferometric Reflectometer: Hardware, Calibration, and Validation Experiments. Sensors, 19(5), 1019. https://doi.org/10.3390/s19051019