A Sparse Autoencoder and Softmax Regression Based Diagnosis Method for the Attachment on the Blades of Marine Current Turbine




Abstract
1. Introduction
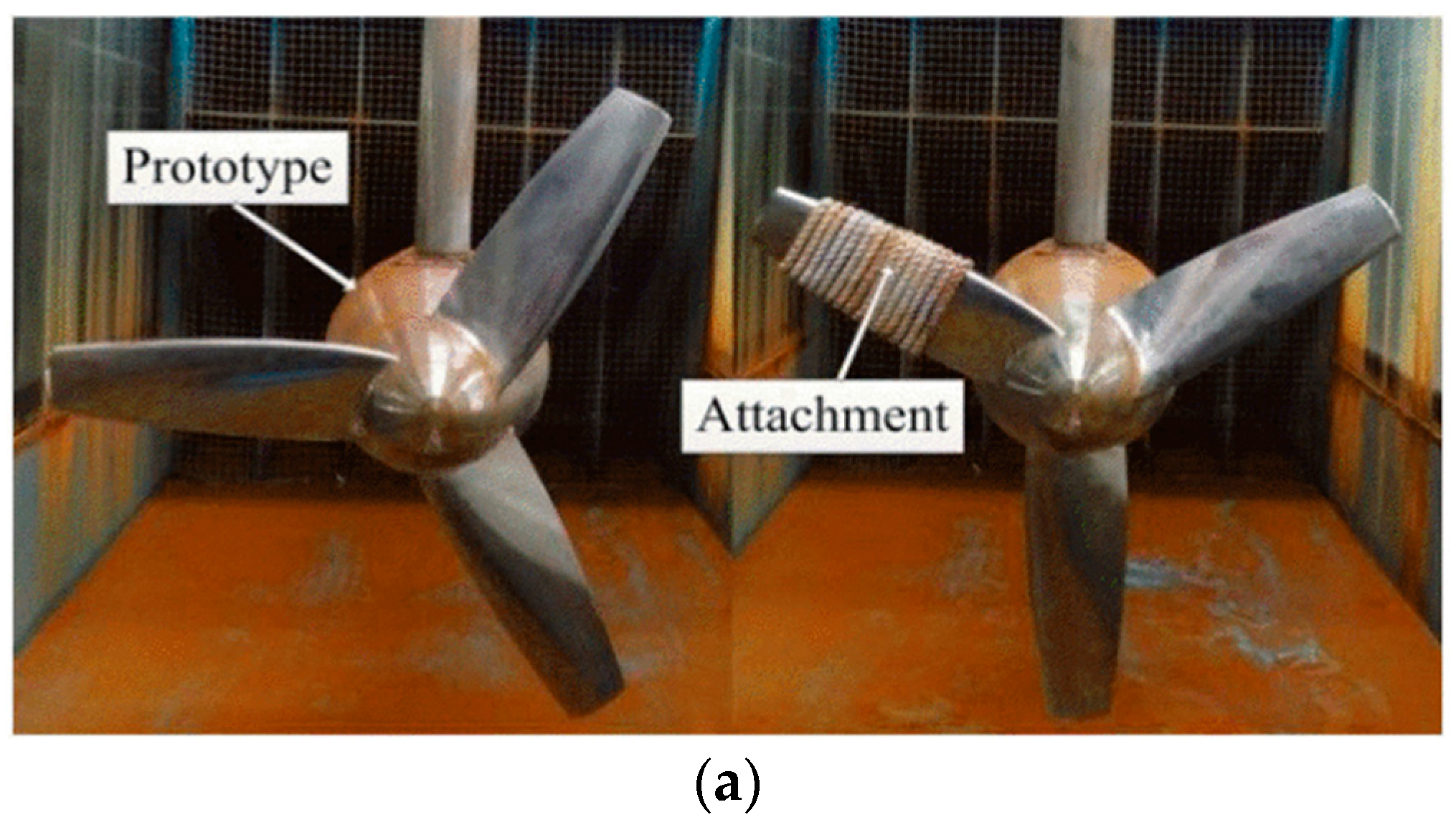
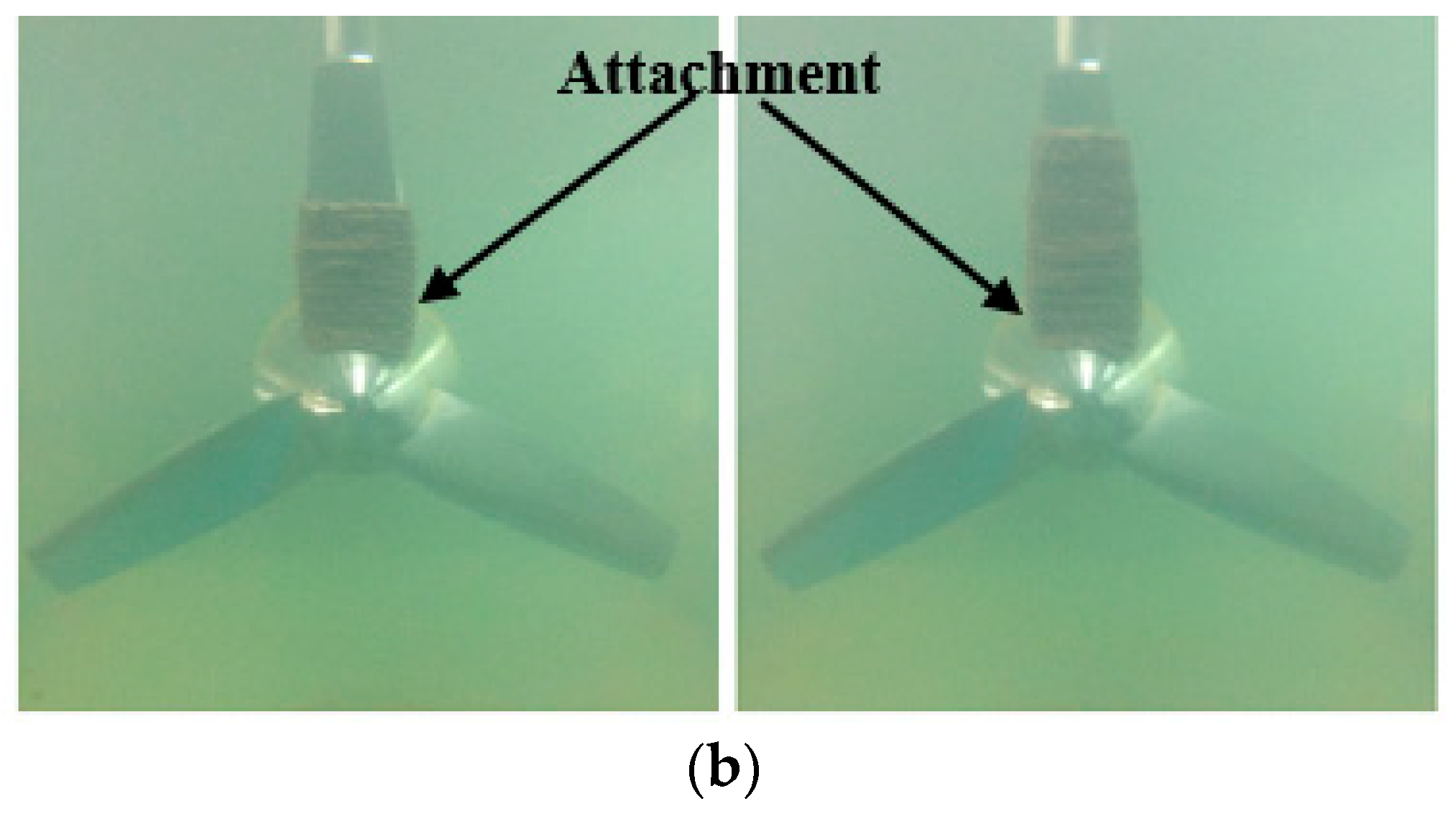
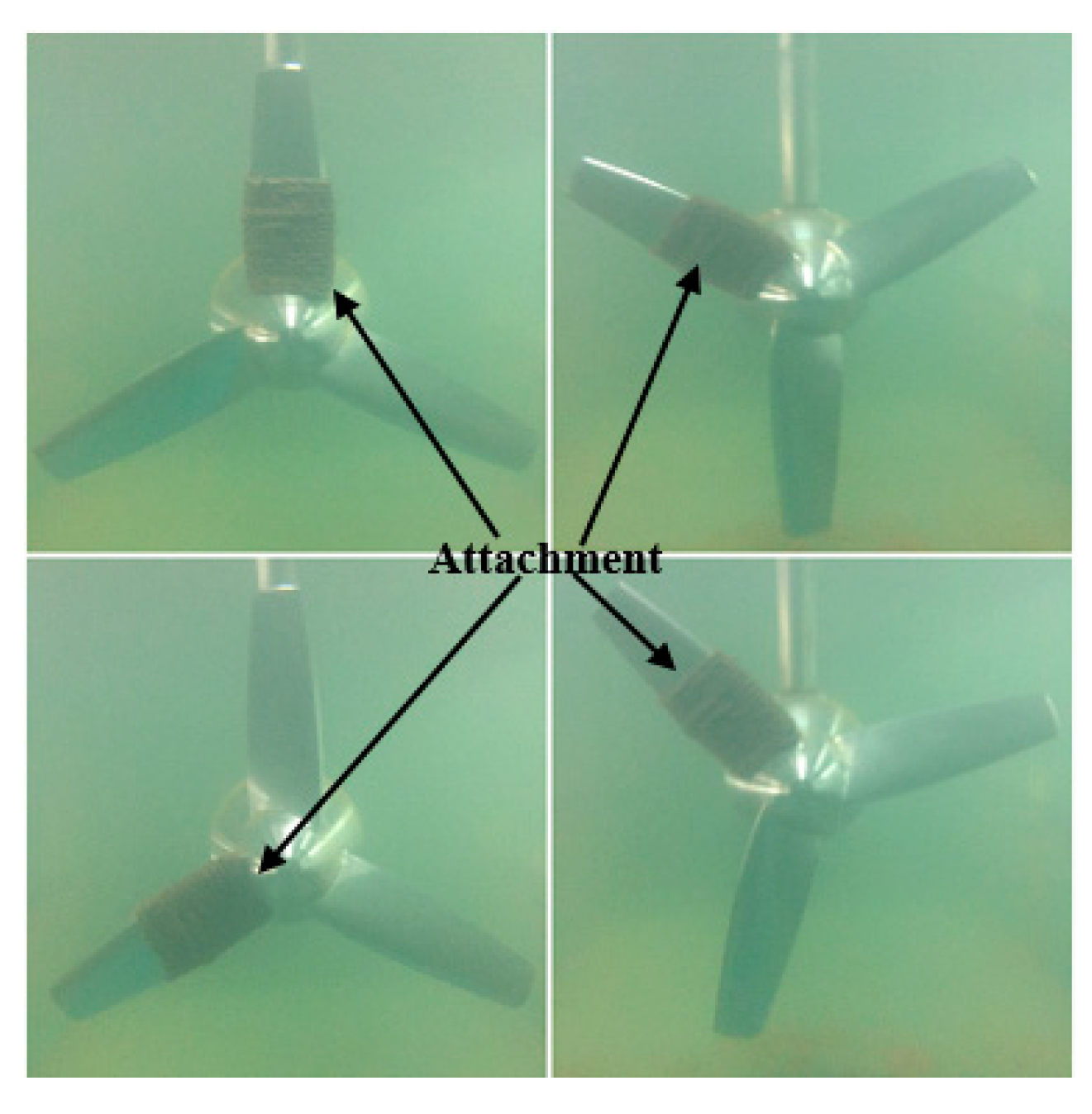
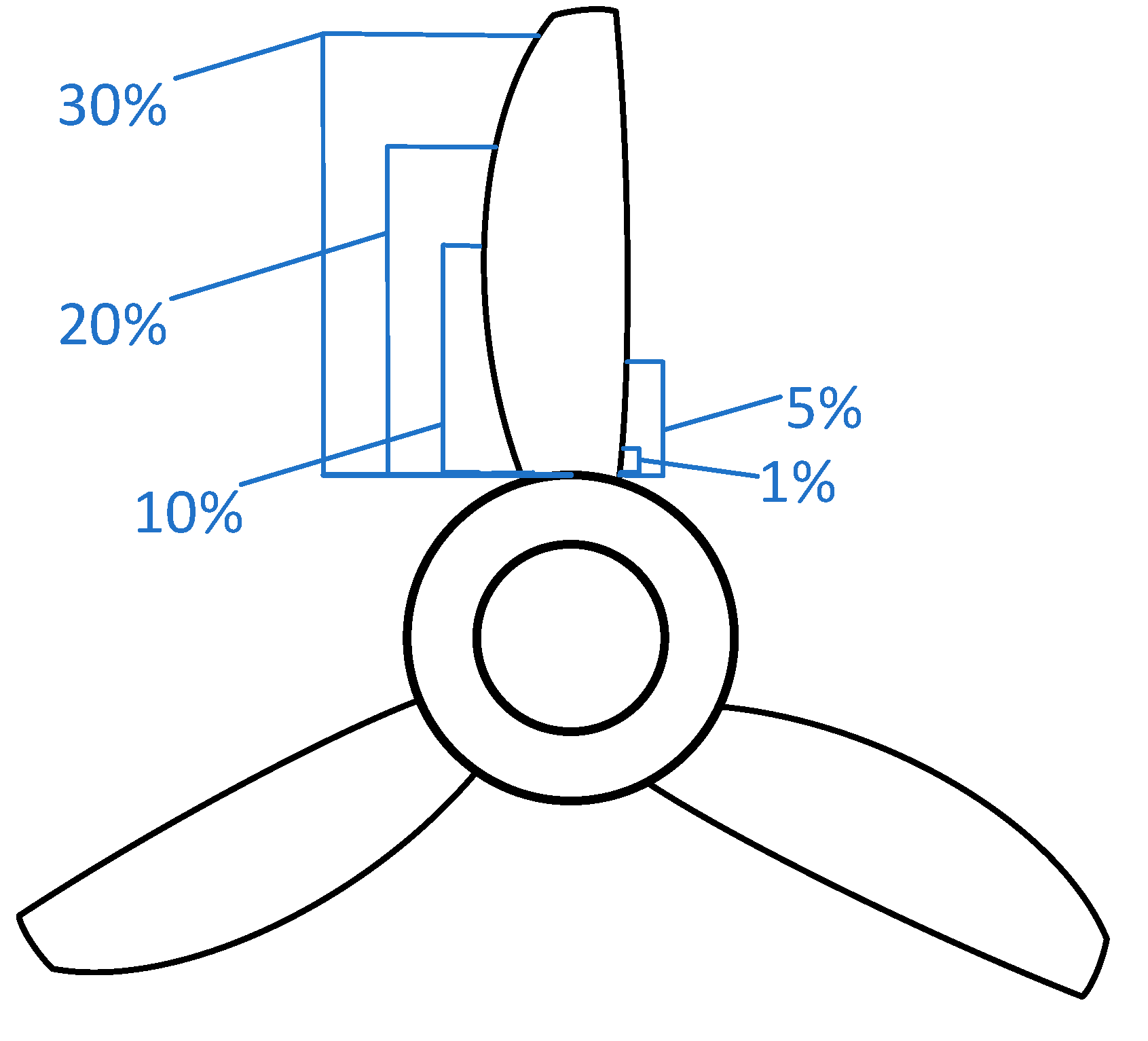
2. Problem Description on Blade Attachment of MCT
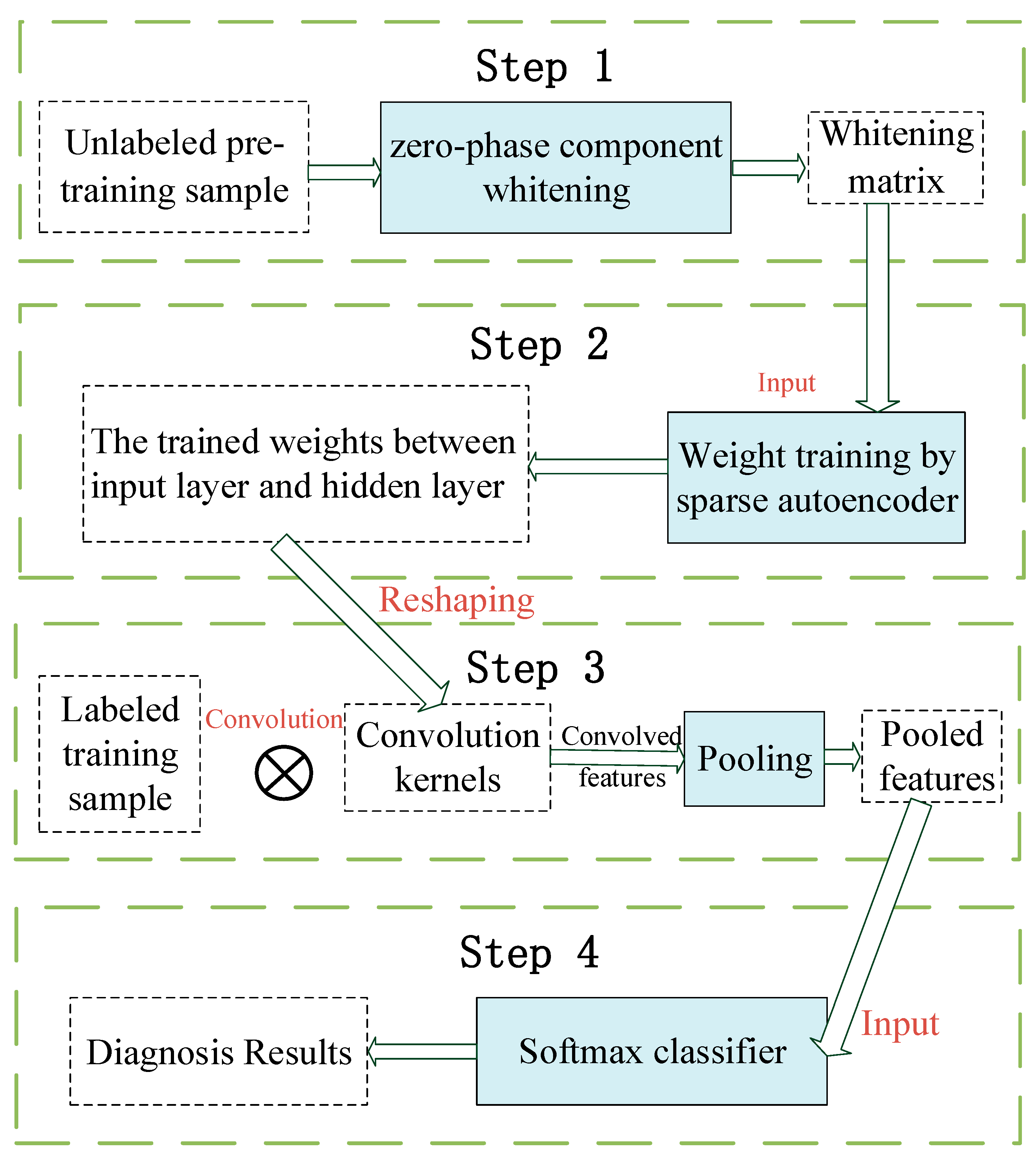
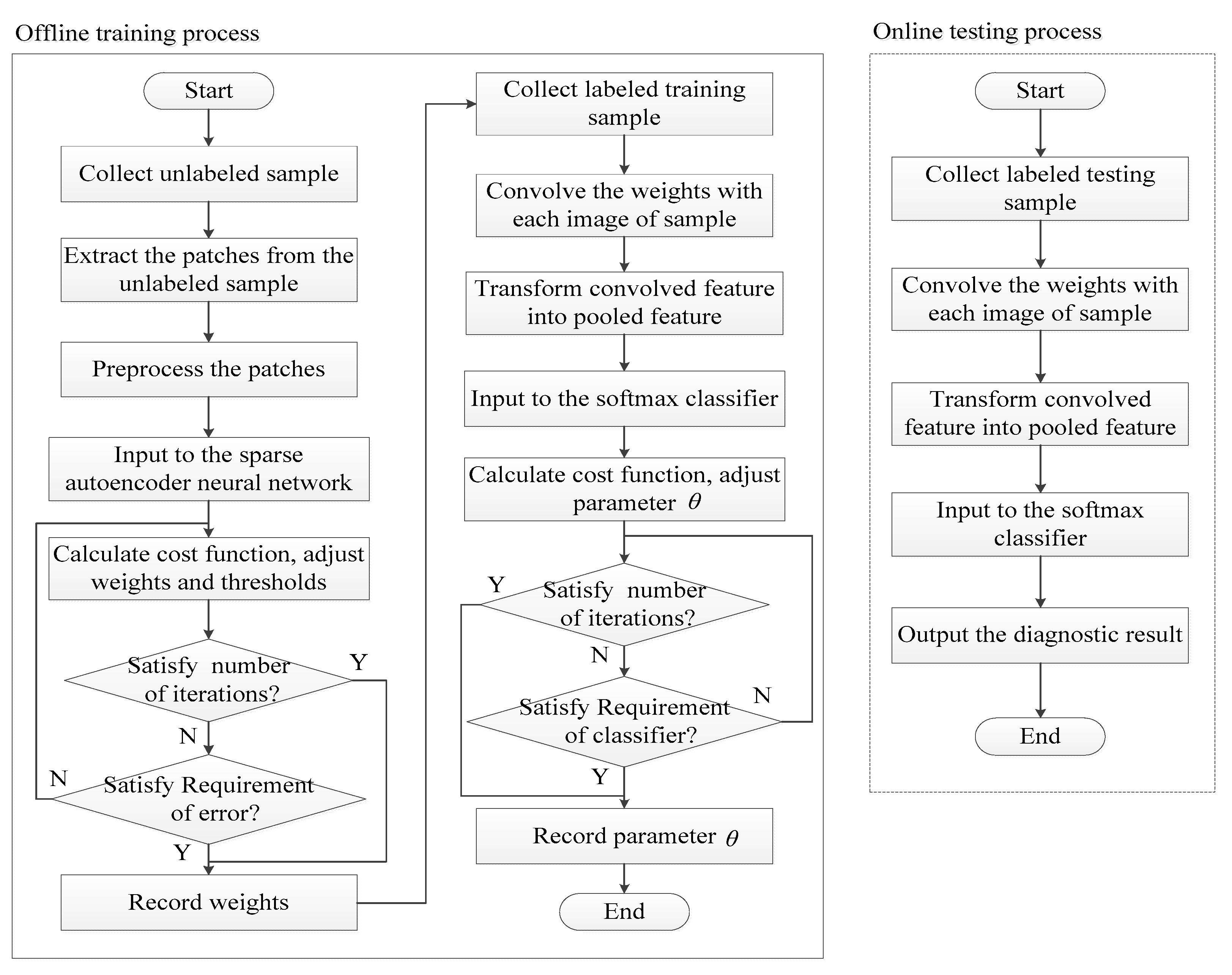
3. The Sparse Autoencoder and Softmax Regression Based Diagnosis Method
3.1. Image Data Preprocessing
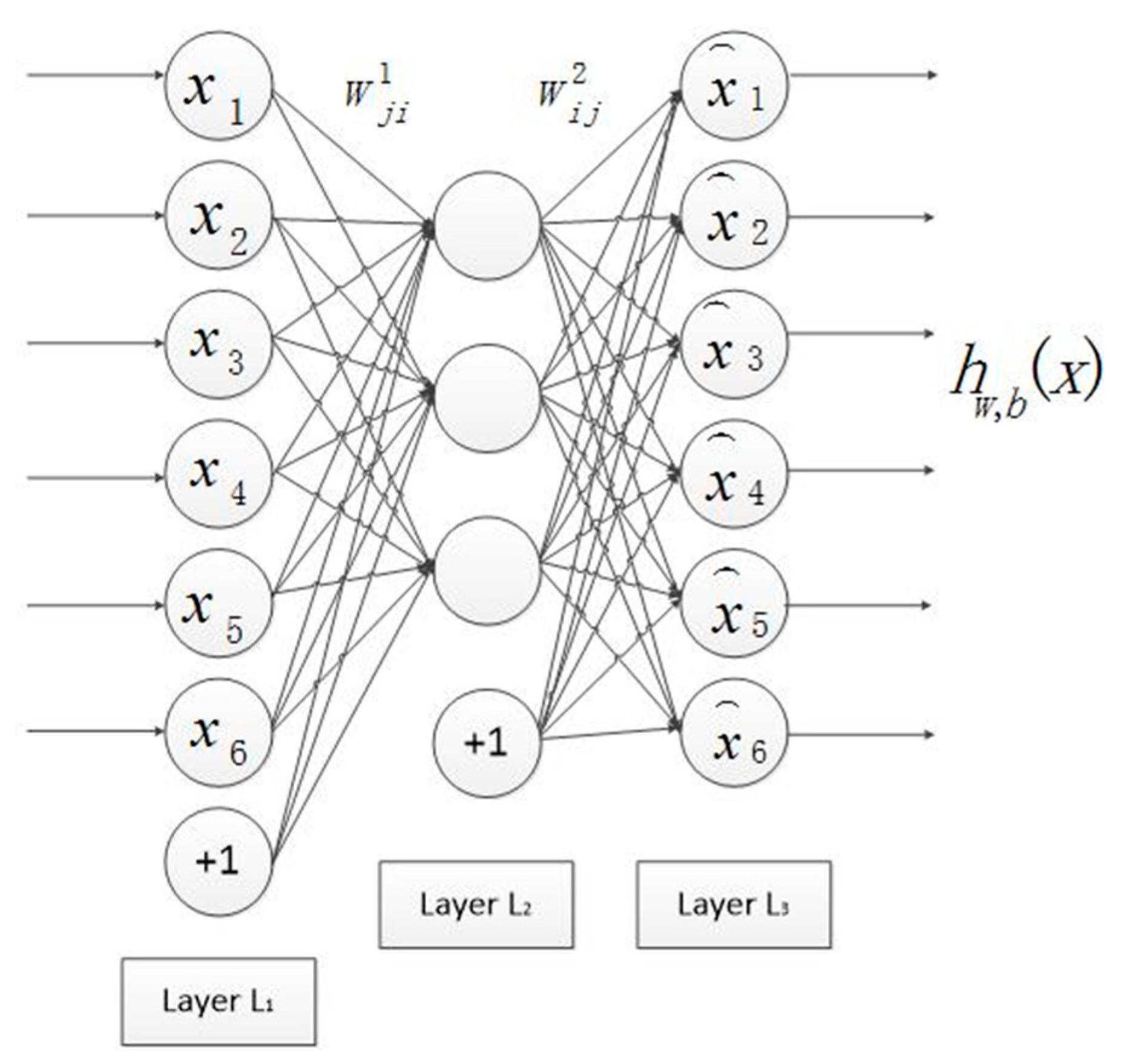
3.2. Pre-Training Convolutional Kernels Based on Sparse Autoencoder
3.3. Features Extraction Based on Convolution and Pooling
3.4. Faults Classification Based on Softmax Classifier
4. Experimental Analysis
4.1. Experimental Platform
4.2. Experimental Results and Comparison
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Muller, N.; Kouro, S.; Malinowski, M.; Rojas, C.A.; Jasinski, M.; Estay, G. Medium-voltage power converter interface for multi-generator marine energy conversion systems. IEEE Trans. Ind. Electron. 2016, 64, 1061–1070. [Google Scholar] [CrossRef]
- Ferreira, R.M.; Estefen, S.F.; Romeiser, R. Under what conditions sar along-track interferometry is suitable for assessment of tidal energy resource. IEEE J. Sel. Top. App. Earth Observation Remote Sens. 2017, 9, 5011–5022. [Google Scholar] [CrossRef]
- Lawrence, J.; Sedgwick, J.; Jeffrey, H.; Bryden, I. An overview of the U.K. marine energy sector. Proc. IEEE 2013, 101, 876–890. [Google Scholar] [CrossRef]
- Zhou, Z.; Benbouzid, M.; Charpentier, J.F.; Scuiller, F.; Tang, T. A review of energy storage technologies for marine current energy systems. Renew. Sustain. Energy Rev. 2013, 18, 390–400. [Google Scholar] [CrossRef]
- Anwar, M.B.; Moursi, M.S.E.; Xiao, W. Dispatching and frequency control strategies for marine current turbines based on doubly fed induction generator. IEEE Trans. Sustain. Energy 2016, 7, 262–270. [Google Scholar] [CrossRef]
- Goundar, J.N.; Ahmed, M.R. Marine current energy resource assessment and design of a marine current turbine for Fiji. Renew. Energy 2014, 65, 14–22. [Google Scholar] [CrossRef]
- Chen, H.; At-Ahmed, N.; Machmoum, M.; Zam, E.H. Modeling and vector control of marine current energy conversion system based on doubly salient permanent magnet generator. IEEE Trans. Sustain. Energy 2015, 7, 409–418. [Google Scholar] [CrossRef]
- Chen, H.; Tang, T.; Ait-Ahmed, N.; Benbouzid, M.E.H.; Machmoum, M.; Zaim, E.H. Attraction, challenge and current status of marine current energy. IEEE Access 2018, 6, 12665–12685. [Google Scholar] [CrossRef]
- Cao, S.; Wang, J.D.; Chen, H.S.; Chen, D.R. Progress of marine biofouling and antifouling technologies. Chin. Sci. Bull. 2011, 56, 598–612. [Google Scholar] [CrossRef]
- Hsu, H.H.; Selvaganapathy, P.R. Development of a low cost Hemin based dissolved oxygen sensor with anti-biofouling coating for water monitoring. IEEE Sens. J. 2014, 14, 3400–4307. [Google Scholar] [CrossRef]
- Kavousi-Fard, A.; Su, W. A combined prognostic model based on machine learning for tidal current prediction. IEEE Trans. Geosci. Remote Sen. 2017, 55, 3108–3114. [Google Scholar] [CrossRef]
- Ren, Z.; Wang, K.; Li, W.; Jin, L.; Dai, Y. Probabilistic power flow analysis of power systems incorporating tidal current generation. IEEE Trans. Sustain. Energy 2017, 8, 1195–1203. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Zhou, Z.; Scuiller, F.; Charpentier, J.F.; Benbouzid, M.E.H.; Tang, T. Power smoothing control in a grid-connected marine current turbine system for compensating swell effect. IEEE Trans. Sustain. Energy 2013, 4, 816–826. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, T.; Tang, T. An imbalance fault detection method based on data normalization and EMD for marine current turbines. ISA Trans. 2017, 68, 302–312. [Google Scholar] [CrossRef] [PubMed]
- Zhou, F.; Park, J.H.; Liu, Y.; Wen, C. Differential feature based hierarchical PCA fault detection method for dynamic fault. Neurocomputing 2016, 202, 27–35. [Google Scholar] [CrossRef]
- Zhang, M.; Tang, T.; Wang, T. Multi-domain reference method for fault detection of marine current turbine. In Proceedings of the 3rd Annual Conference of the IEEE Industrial Electronics Society (IECON 2017), Beijing, China, 29 October–1 November 2017; pp. 8087–8092. [Google Scholar]
- Wang, T.; Liu, L.; Zhang, J.; Emmanuel, S.; Wang, Y. A M-EKF fault detection strategy of insulation system for marine current turbine. Mech. Syst. Signal Process. 2019, 15, 269–280. [Google Scholar] [CrossRef]
- Alvarez, A.; Caiti, A.; Onken, R. Evolutionary path planning for autonomous underwater vehicles in a variable ocean. IEEE J. Oceanic Eng. 2004, 29, 418–429. [Google Scholar] [CrossRef]
- Mcgee, J.; Catipovic, J.; Schoenecker, S.; Swaszek, P. Interference suppression in congested undersea environments. In Proceedings of the OCEANS 2015-Genova, Genova, Italy, 18–21 May 2015; pp. 1–8. [Google Scholar]
- Krishna, C.R.; Yadav, P.S. A hybrid localization scheme for Underwater Wireless Sensor Networks. In Proceedings of the International Conference on Issues and Challenges in Intelligent Computing Techniques, Ghaziabad, India, 7–8 February 2017; pp. 579–582. [Google Scholar]
- Huang, L.; Zhao, X.; Huang, X.; Liu, Y. Underwater camera model and its use in calibration. In Proceedings of the IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 1519–1523. [Google Scholar]
- Cho, H.; Jeo, H.; Yu, S.C.; Lee, J.K.; Jeon, M. Development of all-in-one-type deep-sea camera for monitoring Red Snow-crab habitats. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, Canada, 19–23 September 2016; pp. 1–5. [Google Scholar]
- Xie, J.; Zhou, J. Classification of urban building type from high spatial resolution remote sensing imagery using extended MRS and soft BP network. IEEE J. Sel. Top. App. Earth Observ. Remote Sens. 2017, 10, 3515–3528. [Google Scholar] [CrossRef]
- Wang, T.; Qi, J.; Xu, H. Fault diagnosis method based on FFT-RPCA-SVM for Cascaded-Multilevel Inverter. ISA Trans. 2015, 60, 156–163. [Google Scholar] [CrossRef]
- Réjichi, S.; Chaabane, F. Feature extraction using PCA for VHR satellite image time series spatio-temporal classification. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 485–488. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Freeman, I.; Roese-Koerner, L.; Kummert, A. Effnet: An efficient structure for convolutional neural networks. In Proceedings of the 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; pp. 6–10. [Google Scholar]
- LÉcun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Xin, B.; Wang, T.; Tang, T. A deep learning and softmax regression fault diagnosis method for multi-level converter. In Proceedings of the IEEE 11th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Tinos, Greece, 29 August–1 September 2017. [Google Scholar]
- Hou, G.; Pan, Z.; Huang, B.; Wang, G.; Luan, X. Hue preserving-based approach for underwater colour image enhancement. IET Image Process. 2018, 12, 292–298. [Google Scholar] [CrossRef]
- Walker, J.M.; Flack, K.A.; Lust, E.E.; Schultz, M.P.; Luznik, L. Experimental and numerical studies of blade roughness and fouling on marine current turbine performance. Renew. Energy 2014, 66, 257–267. [Google Scholar] [CrossRef]
- Endre, S.; Michał, Z.; Eyras, E. Detection of recurrent alternative splicing switches in tumor samples reveals novel signatures of cancer. Nucl. Acid. Res. 2015, 43, 1345–1356. [Google Scholar]
- Krsman, V.D.; Sarić, A.T. Bad area detection and whitening transformation-based identification in three-phase distribution state estimation. IET Gen. Transm. Distrib. 2017, 11, 2351–2361. [Google Scholar] [CrossRef]
- Ge, F.; Ju, Y.; Qi, Z.; Lin, Y. Parameter estimation of a gaussian mixture model for wind power forecast error by Riemann l-bfgs optimization. IEEE Access 2018, 6, 38892–38899. [Google Scholar] [CrossRef]
- Norouzi, M.; Ranjbar, M.; Mori, G. Stacks of convolutional Restricted Boltzmann Machines for shift-invariant feature learning. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 2735–2742. [Google Scholar]
- Ge, Z. Process data analytics via probabilistic latent variable models: A tutorial review. Ind. Eng. Chem. Res. 2018, 57, 12646–12661. [Google Scholar] [CrossRef]
- Wang, T.; Xu, H.; Han, J.; Bouchikhi, E.H.E.; Benbouzid, M. Cascaded h-bridge multilevel inverter system fault diagnosis using a PCA and multi-class relevance vector machine approach. IEEE Trans. Power Electron. 2015, 30, 7006–7018. [Google Scholar] [CrossRef]
- Rad, S.J.M.; Tab, F.A.; Mollazade, K. Classification of Rice Varieties Using Optimal Color and Texture Features and BP Neural Networks. In Proceedings of the 7th Iranian Conference on Machine Vision and Image Processing, Tehran, Germany, 16–17 November 2011; pp. 1–5. [Google Scholar]
- Wen, C.; Wang, Z.; Hu, J.; Liu, Q.; Alsaadi, F.E. Recursive filtering for state-saturated systems with randomly occurring nonlinearities and missing measurements. Int. J. Robust Nonlinear Control. 2018, 28, 1715–1727. [Google Scholar] [CrossRef]
- Wang, Y.; Ding, F. A filtering based multi-innovation gradient estimation algorithm and performance analysis for nonlinear dynamical systems. IMA. App. Math. 2017, 82, 1171–1191. [Google Scholar] [CrossRef]
- Xu, X.; Li, S.; Song, X.; Wen, C.; Xu, D. The optimal design of industrial alarm systems based on evidence theory. Control Eng. Practice 2016, 46, 142–156. [Google Scholar] [CrossRef]
- Liu, S.; Ding, F.; Xu, L.; Hayat, T. Hierarchical principle-based iterative parameter estimation algorithm for dual-frequency signals. Circ. Syst. Signal Process. 2019, 1–18. [Google Scholar] [CrossRef]
- Wen, C.; Wang, Z.; Liu, Q.; Alsaadi, F.E. Recursive distributed filtering for a class of state-saturated systems with fading measurements and quantization effects. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 930–941. [Google Scholar] [CrossRef]
- Wan, L.; Ding, F. Decomposition-and gradient-based iterative identification algorithms for multivariable systems using the multi-innovation theory. Circ. Syst. Signal Process. 2019, 5. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Percentage of Area Occupied by Attachment (%) | (0,1] | (1,5] | (5,10] | (10,20] | (20,30] | 60 (two blades, with each 30 attachment) | 90 (three blades, with each 30 attachment) |
| Classifier Labels | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Dataset’s Name | Number |
|---|---|
| Unlabeled pre-training sample | 160 |
| Labeled training sample | 420 |
| Testing sample | 280 |
| PMSG | SAP 71 |
|---|---|
| Rated power | 230 W |
| Rated voltage | 37 V |
| Rated current | 21 A |
| Pole-pair number | 8 |
| Airfoil | Naca0018 |
| Chord length | 0.19 m–0.32 m |
| Blade diameter | 0.6 m |
| Mentioned Methods | Parameters’ Name | Parameters |
|---|---|---|
| PCA | Cumulative percent variance | 95% or 99% |
| BP (classifier) | Number of layers | 2 |
| Loss function | Mean-square error | |
| CNN | Number of convolutional layers | 1 |
| Number of pooling layers | 1 | |
| Loss function | Cross entropy loss |
| Parameters | Significance | Value |
|---|---|---|
| Whitening parameter | 0.1 | |
| m | Number of training samples | 80,000 |
| Weight attenuation parameter for SA | 0.003 | |
| Weight of the sparsity penalty term | 3 | |
| Sparsity parameter | 0.1 | |
| Weight attenuation parameter for softmax | 0.0001 | |
| Hidden size | Number of neurons in the hidden layer | 400 |
| t | Proportionality coefficient | 1 |
| Diagnosis Method | Average | |
|---|---|---|
| PCA + BP | CPV = 95% | 89.286% |
| CPV = 99% | 83.214% | |
| PCA + softmax | CPV = 95% | 93.929% |
| CPV = 99% | 96.429% | |
| SA+BP | 97.345% | |
| SA+softmax | 98.214% | |
| CNN | 97.500% | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Wang, T.; Xin, B.; Xie, T.; Wang, Y. A Sparse Autoencoder and Softmax Regression Based Diagnosis Method for the Attachment on the Blades of Marine Current Turbine. Sensors 2019, 19, 826. https://doi.org/10.3390/s19040826
Zheng Y, Wang T, Xin B, Xie T, Wang Y. A Sparse Autoencoder and Softmax Regression Based Diagnosis Method for the Attachment on the Blades of Marine Current Turbine. Sensors. 2019; 19(4):826. https://doi.org/10.3390/s19040826
Chicago/Turabian StyleZheng, Yilai, Tianzhen Wang, Bin Xin, Tao Xie, and Yide Wang. 2019. "A Sparse Autoencoder and Softmax Regression Based Diagnosis Method for the Attachment on the Blades of Marine Current Turbine" Sensors 19, no. 4: 826. https://doi.org/10.3390/s19040826
APA StyleZheng, Y., Wang, T., Xin, B., Xie, T., & Wang, Y. (2019). A Sparse Autoencoder and Softmax Regression Based Diagnosis Method for the Attachment on the Blades of Marine Current Turbine. Sensors, 19(4), 826. https://doi.org/10.3390/s19040826