Constrained Unscented Particle Filter for SINS/GNSS/ADS Integrated Airship Navigation in the Presence of Wind Field Disturbance




Abstract
1. Introduction
2. Mathematical Model of SINS/GNSS/ADS Integrated Navigation
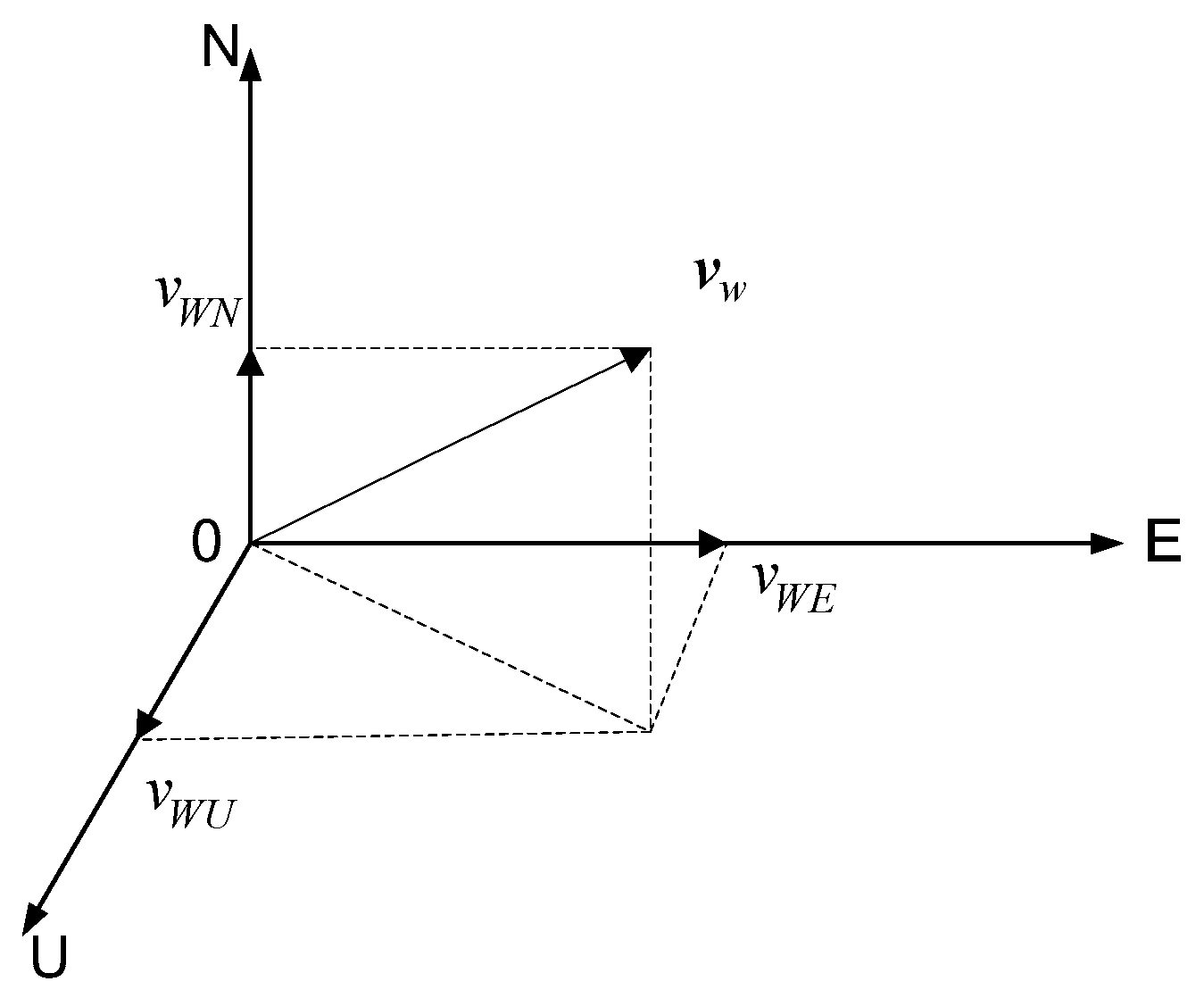
2.1. Wind Speed Model
2.2. System State Equation of SINS/GNSS/ADS Integrated Navigation
2.3. Measurement Equation of SINS/GNSS/ADS Integrated Navigation
2.4. Wind Field-Based Constraint Model
3. Constrained Unscented Particle Filter
3.1. Conventional Unscented Particle Filter
- (I)
- Importance samplingFor , update the particles with UKF:
- (a)
- Calculate the sigma points
- (b)
- Time update
- (c)
- Measurement updateThe particles are sampled by . Subsequently, set and , and normalize the importance weights.
- (II)
- ResamplingIgnore the samples with low importance weights. To obtain random samples approximately distributed according to , we duplicate the particles having high weights and set .
- (III)
- Output
3.2. Convergence of Constrained UPF
3.3. Convergence of Constrained UPF
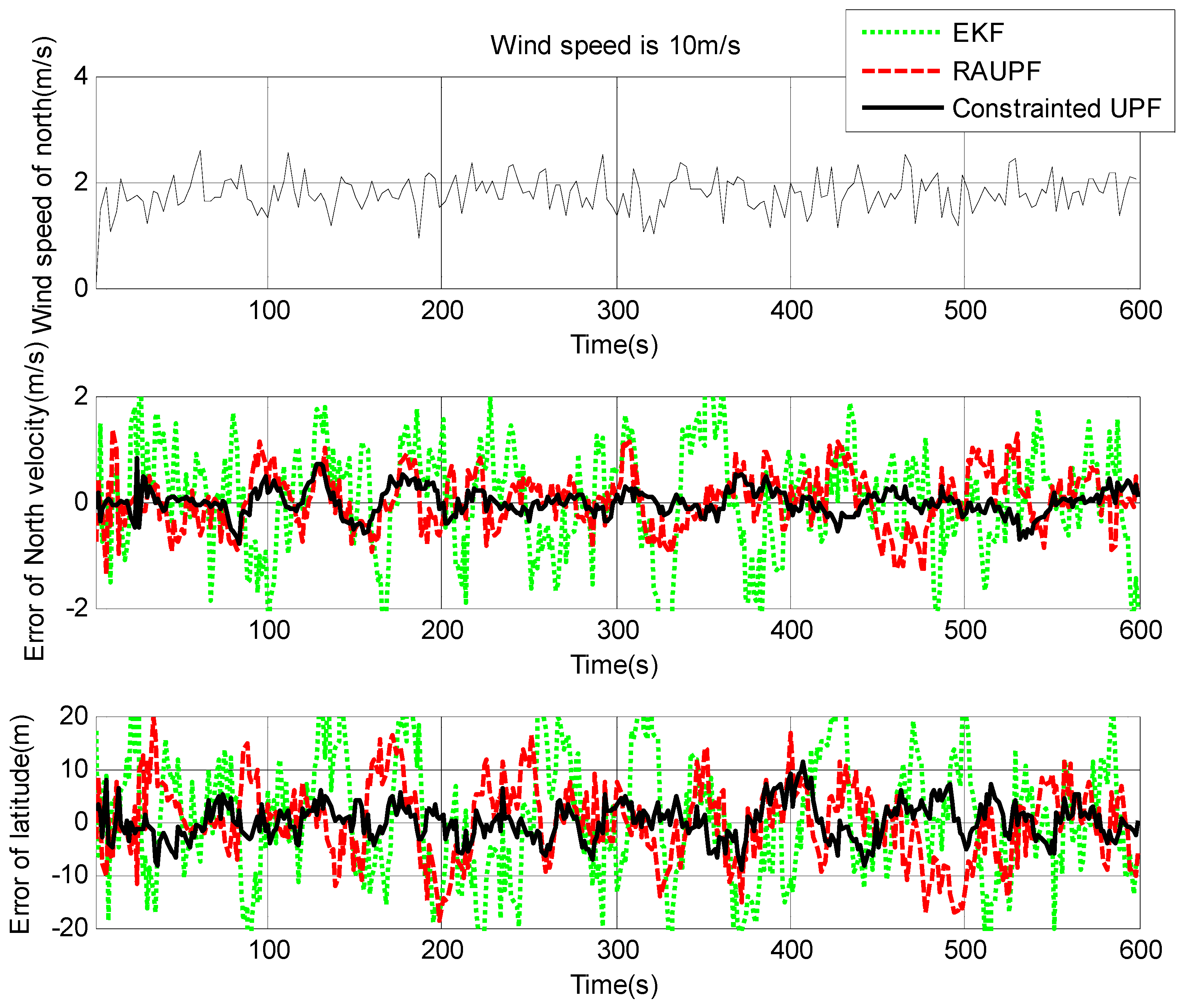
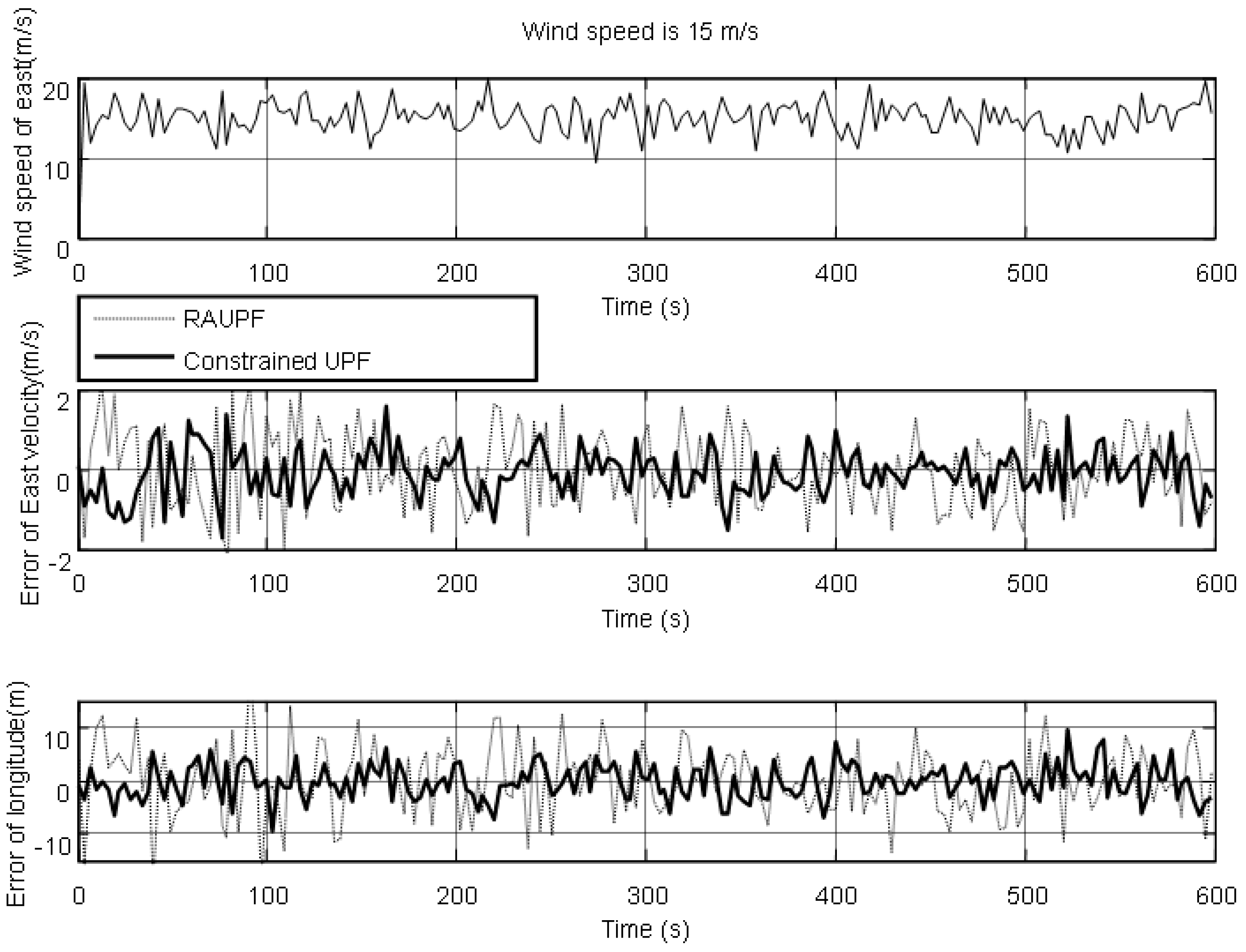
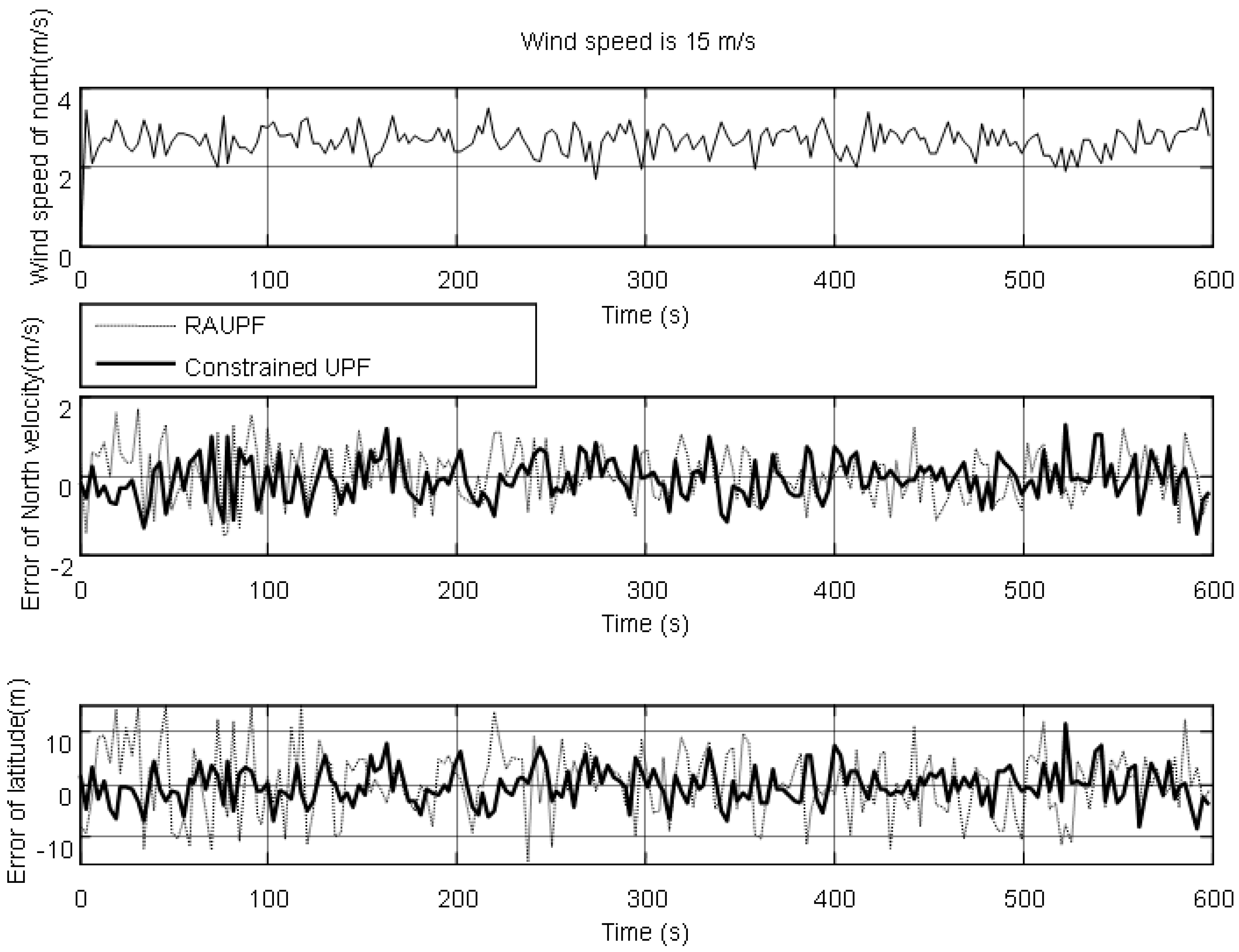
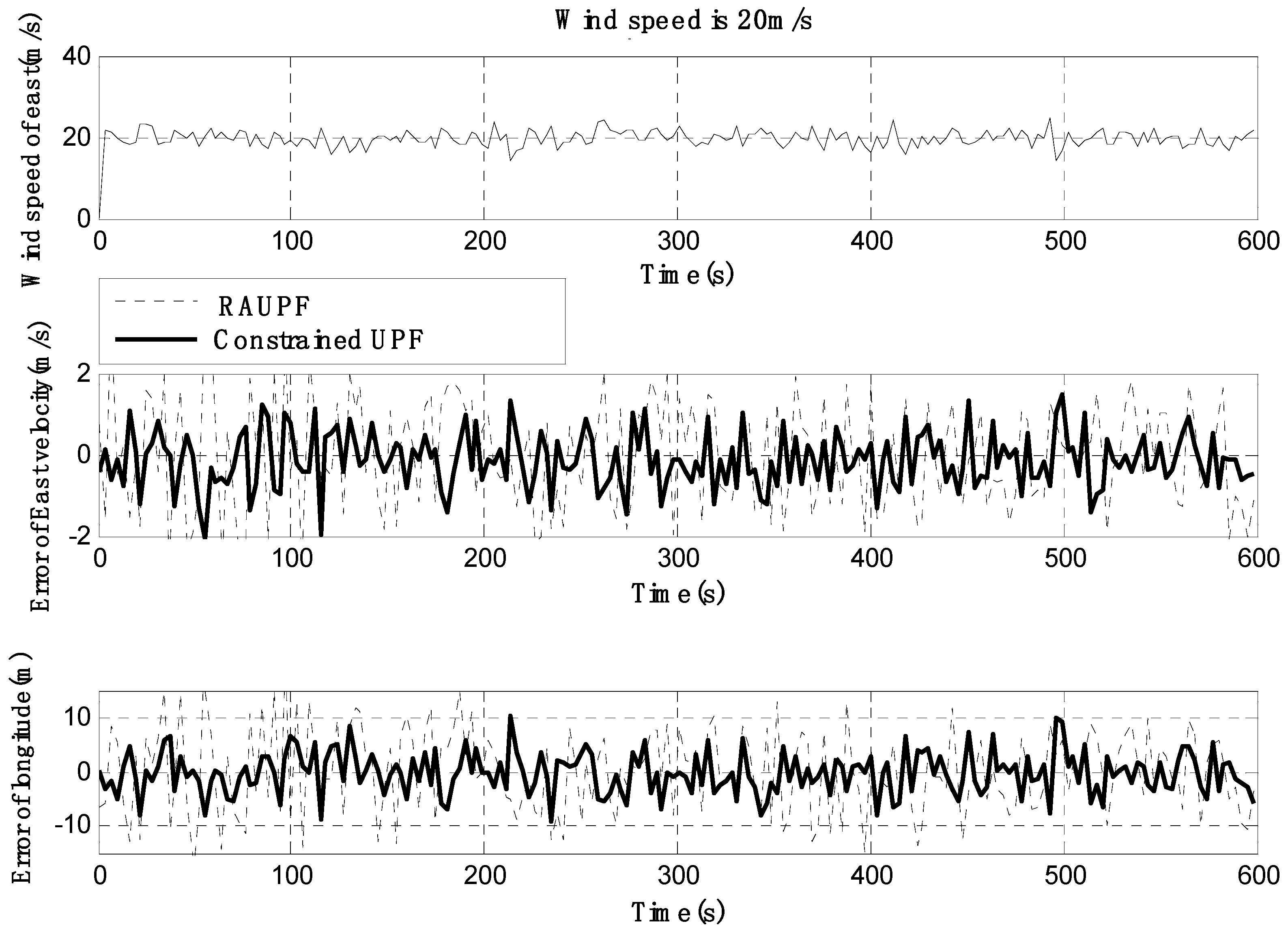
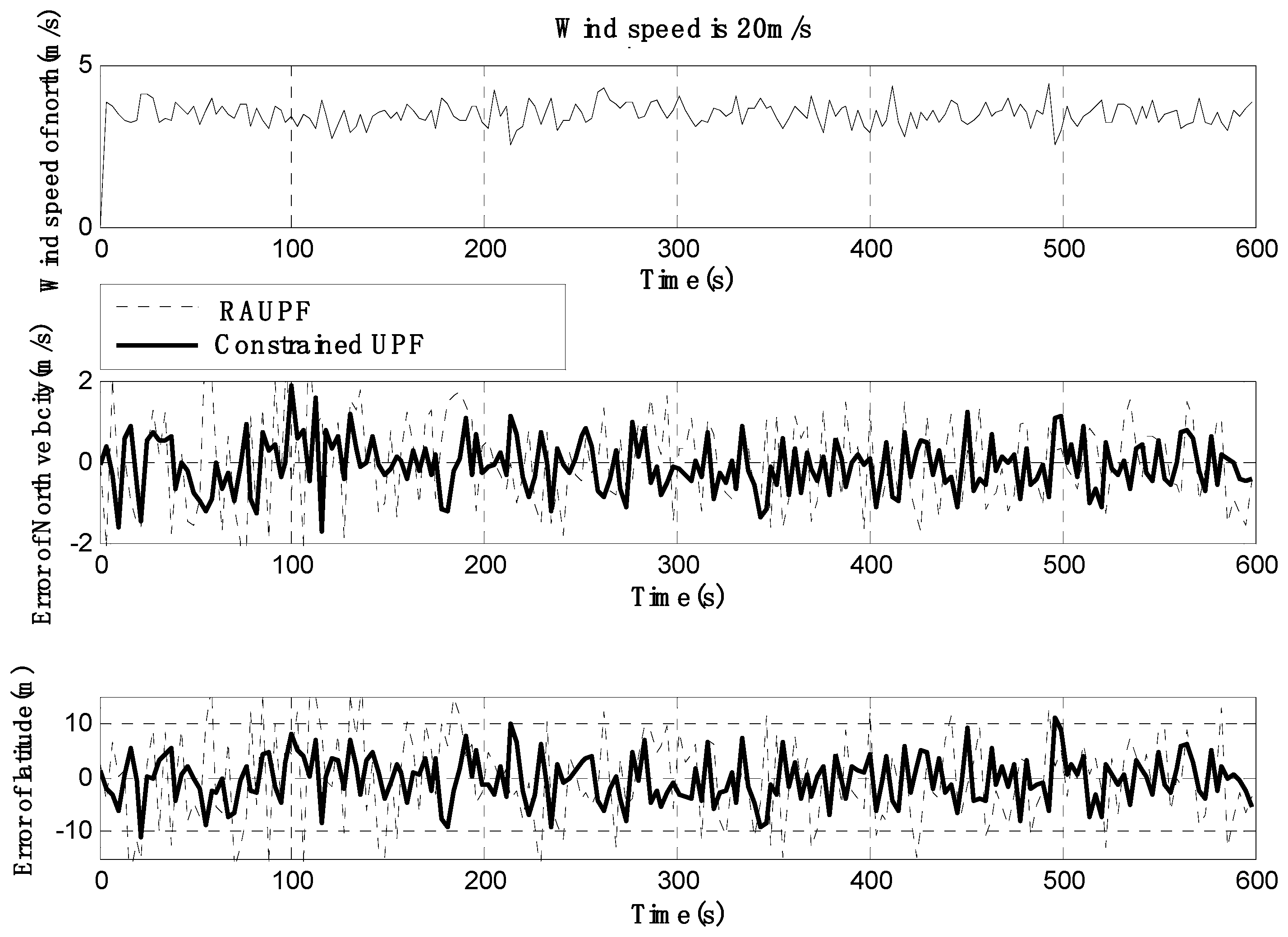
4. Simulations and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Proof of Lemma 1
Appendix B. Proof of Lemma 2
Appendix C. Proof of Lemma 3
Appendix D. Proof of Theorem 1
References
- Scaife, A.; Karpechko, A.Y.; Baldwin, M.P.; Brookshaw, A.; Butler, A.H.; Eade, R.; Gordon, M.; MacLachlan, C.; Martin, N.; Dunstone, N.; et al. Seasonal winter forecasts and the stratosphere. Atmos. Sci. Lett. 2016, 17, 51–56. [Google Scholar] [CrossRef]
- Green, J.; Gage, K. Observations of stable layers in the troposphere and stratosphere using VHF radar. Radio Sci. 2016, 15, 395–405. [Google Scholar] [CrossRef]
- Jakub, J.; Bronislav, K.; Jiří Pospíšil, C. Autonomous airship equipped by multi-sensor mapping platform. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 5, 119–124. [Google Scholar]
- Hu, G.G.; Wang, W.; Zhong, Y.M.; Gao, B.B.; Gu, C.F. A new direct filtering approach to INS/GNSS integration. Aerosp. Sci. Technol. 2018, 77, 755–764. [Google Scholar] [CrossRef]
- Gao, B.B.; Hu, G.G.; Gao, S.S.; Zhong, Y.; Gu, C.F. Multi-sensor optimal data fusion for INS/GNSS/CNS integration based on unscented kalman filter. Int. J. Control Autom. Syst. 2018, 16, 129–140. [Google Scholar] [CrossRef]
- Gao, S.S.; Zhong, Y.; Zhang, X.; Shirinzadeh, B. Multi-sensor optimal data fusion for INS/GPS/SAR integrated navigation system. Aerosp. Sci. Technol. 2009, 13, 232–237. [Google Scholar] [CrossRef]
- Hu, G.G.; Gao, S.S.; Zhong, Y.M. A derivative UKF for tightly coupled INS/GPS integrated navigation. ISA Trans. 2015, 56, 135–144. [Google Scholar] [CrossRef]
- Georgy, J.; Noureldin, A.; Korenberg, M.J.; Bayoumi, M.M. Modeling the stochastic drift of a MEMS-based gyroscope in gyro/odometer/GPS integrated navigation. IEEE Trans. Intell. Transp. Syst. 2010, 11, 856–872. [Google Scholar] [CrossRef]
- Almagbile, A.; Wang, J.; Ding, W. Evaluating the performances of adaptive Kalman filter methods in GPS/INS integration. J. Glob. Position. Syst. 2010, 9, 33–40. [Google Scholar] [CrossRef]
- Li, S.; Mei, J.; Qu, Q.; Sun, K. Research on SINS/GPS/CNS fault-tolerant integrated navigation system with air data system assistance. In Proceedings of the IEEE Guidance, Navigation and Control Conference, Nanjing, China, 12–14 August 2016; pp. 2366–2370. [Google Scholar]
- Soldatkin, V.; Nikitin, A. Construction and algorithms of a helicopter air data system with aerometric and ion-tagging measurement channels. Russ. Aeronaut. 2017, 60, 447–453. [Google Scholar] [CrossRef]
- Madhavanpillai, J.; Dhoaya, J.; Balakrishnan, V.S.; Narayanan, R.; Chacko, F.K.; Narayanan, S.M. Inverse flush air data system (FADS) for real time simulations. J. Inst. Eng. 2017, 98, 1–9. [Google Scholar] [CrossRef]
- Di, Y.; Wu, S.; Zhou, Y. Research on flight altitude information fusion method for ADS/INS/GPS integrated systems based on federated filter. Appl. Mech. Mater. 2014, 4, 599–601. [Google Scholar] [CrossRef]
- Gao, B.B.; Hu, G.G.; Gao, S.S.; Zhong, Y.; Gu, C.F. Multi-sensor optimal data fusion based on the adaptive fading unscented kalman filter. Sensors 2018, 18, 488. [Google Scholar] [CrossRef]
- Hu, H.; Huang, X. SINS/CNS/GPS integrated navigation algorithm based on UKF. J. Syst. Eng. Electron. 2010, 21, 102–109. [Google Scholar] [CrossRef]
- Soken, H.E.; Hajiyev, C. Pico satellite attitude estimation via robust unscented Kalman filter in the presence of measurement faults. ISA Trans. 2010, 49, 249–256. [Google Scholar] [CrossRef] [PubMed]
- Tao, L.; Yuan, G.; Wang, L. Particle filter with novel nonlinear error model for miniature gyroscope-based measurement while drilling navigation. Sensors 2016, 16, 371. [Google Scholar]
- Rigatos, G.G. Nonlinear kalman filters and particle filters for integrated navigation of unmanned aerial vehicles. Robotics Auton. Syst. 2012, 60, 978–995. [Google Scholar] [CrossRef]
- Doucet, A.; Freitas, N.D.; Gordon, N. Sequential Monte Carlo Methods in Practice; Springer: Berlin, Germany, 2001. [Google Scholar]
- Ming, Q.; Jo, K.H. A novel particle filter implementation for a multiple-vehicle detection and tracking system using tail light segmentation. Int. J. Control Autom. Syst. 2013, 11, 577–585. [Google Scholar]
- Nordlund, P.J. Sequential Monte Carlo Filters and Integrated Navigation. Licentiate Thesis, Linköping University, Linköping, Sweden, 2002. [Google Scholar]
- Gao, B.B.; Gao, S.S.; Hu, G.G.; Zhong, Y.; Gu, C.F. Maximum likelihood principle and moving horizon estimation based adaptive unscented kalman filter. Aerosp. Sci. Technol. 2018, 73, 184–196. [Google Scholar] [CrossRef]
- Gao, B.B.; Gao, S.S.; Zhong, Y.; Hu, G.G.; Gu, C.F. Interacting multiple model estimation-based adaptive robust unscented kalman filter. Int. J. Control Autom. Syst. 2017, 15, 2013–2025. [Google Scholar] [CrossRef]
- Li, Y.; Sun, S.; Hao, G. A weighted measurement fusion particle filter for nonlinear multisensory systems based on Gauss-Hermite approximation. Sensors 2017, 17, 2222. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Chen, R.; Guo, D. Delayed-pilot sampling for mixture Kalman filter with application in fading channels. IEEE Trans. Signal Process. 2002, 50, 241–254. [Google Scholar] [CrossRef]
- Zhang, N.; Yang, X. Gaussian mixture unscented particle filter with adaptive residual resample for nonlinear model. In Proceedings of the International Conference on Intelligent Computing and Cognitive Informatics, Singapore, 8–9 September 2015; pp. 5–10. [Google Scholar]
- Andrieu, C.; Godsill, S.J. A particle filter for model based audio source separation. In Proceedings of the International Workshop Independent Component Analysis and Blind Signal Separation, Helsinki, Finland, 19–22 June 2000; pp. 381–386. [Google Scholar]
- Julier, S.J.; LaViola, J.J. On Kalman filtering with nonlinear equality constraints. IEEE Trans. Signal Process. 2007, 55, 2774–2784. [Google Scholar] [CrossRef]
- Xue, L.; Gao, S.S.; Zhong, Y.M. Robust adaptive unscented particle filter. Int. J. Intell. Mechatron. Robot. 2013, 3, 55–56. [Google Scholar] [CrossRef]
- Gao, Z.H.; Mu, D.J.; Zhong, Y.M.; Gu, C.F. A strap-down inertial navigation/spectrum red-shift/star sensor (SINS/SRS/SS) autonomous integrated system for spacecraft navigation. Sensors 2018, 18, 2039. [Google Scholar] [CrossRef] [PubMed]
- Palanthandalam-Madapusi, H.J.; Girard, A.; Bernstein, D.S. Wind-field reconstruction using flight data. In Proceedings of the IEEE American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 1863–1868. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filtering Methods | East Velocity Error (m/s) | North Velocity Error (m/s) | Longitude Error (m) | Latitude Error (m) |
|---|---|---|---|---|
| EKF | 0.8532 | 0.7955 | 8.2235 | 8.3465 |
| RAUPF | 0.5679 | 0.3324 | 4.6657 | 4.7968 |
| Constrained UPF | 0.2123 | 0.2198 | 2.8123 | 2.9456 |
| Filtering Methods | East Velocity Error (m/s) | North Velocity Error (m/s) | Longitude Error (m) | Latitude Error (m) |
|---|---|---|---|---|
| RAUPF | 0.8136 | 0.6180 | 5.4120 | 5.5852 |
| Constrained UPF | 0.3058 | 0.4767 | 3.8606 | 3.8769 |
| Filtering Methods | East Velocity Error (m/s) | North Velocity Error (m/s) | Longitude Error (m) | Latitude Error (m) |
|---|---|---|---|---|
| RAUPF | 1.1127 | 1.0092 | 6.8033 | 6.4456 |
| Constrained UPF | 0.5269 | 0.4388 | 4.5319 | 4.1869 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Z.; Mu, D.; Zhong, Y.; Gu, C. Constrained Unscented Particle Filter for SINS/GNSS/ADS Integrated Airship Navigation in the Presence of Wind Field Disturbance. Sensors 2019, 19, 471. https://doi.org/10.3390/s19030471
Gao Z, Mu D, Zhong Y, Gu C. Constrained Unscented Particle Filter for SINS/GNSS/ADS Integrated Airship Navigation in the Presence of Wind Field Disturbance. Sensors. 2019; 19(3):471. https://doi.org/10.3390/s19030471
Chicago/Turabian StyleGao, Zhaohui, Dejun Mu, Yongmin Zhong, and Chengfan Gu. 2019. "Constrained Unscented Particle Filter for SINS/GNSS/ADS Integrated Airship Navigation in the Presence of Wind Field Disturbance" Sensors 19, no. 3: 471. https://doi.org/10.3390/s19030471
APA StyleGao, Z., Mu, D., Zhong, Y., & Gu, C. (2019). Constrained Unscented Particle Filter for SINS/GNSS/ADS Integrated Airship Navigation in the Presence of Wind Field Disturbance. Sensors, 19(3), 471. https://doi.org/10.3390/s19030471