Vehicle Speed and Length Estimation Errors Using the Intelligent Transportation System with a Set of Anisotropic Magneto-Resistive (AMR) Sensors


 ,
,  ,
, 
Abstract
1. Introduction
2. The Design of a Traffic Monitoring System and Sources of Speed Estimation Error
2.1. Error Due to Discretization in Time
2.2. Error Related to Vehicle Deceleration or Acceleration
2.3. Trajectory Error
2.4. Error of Time Delay Estimation
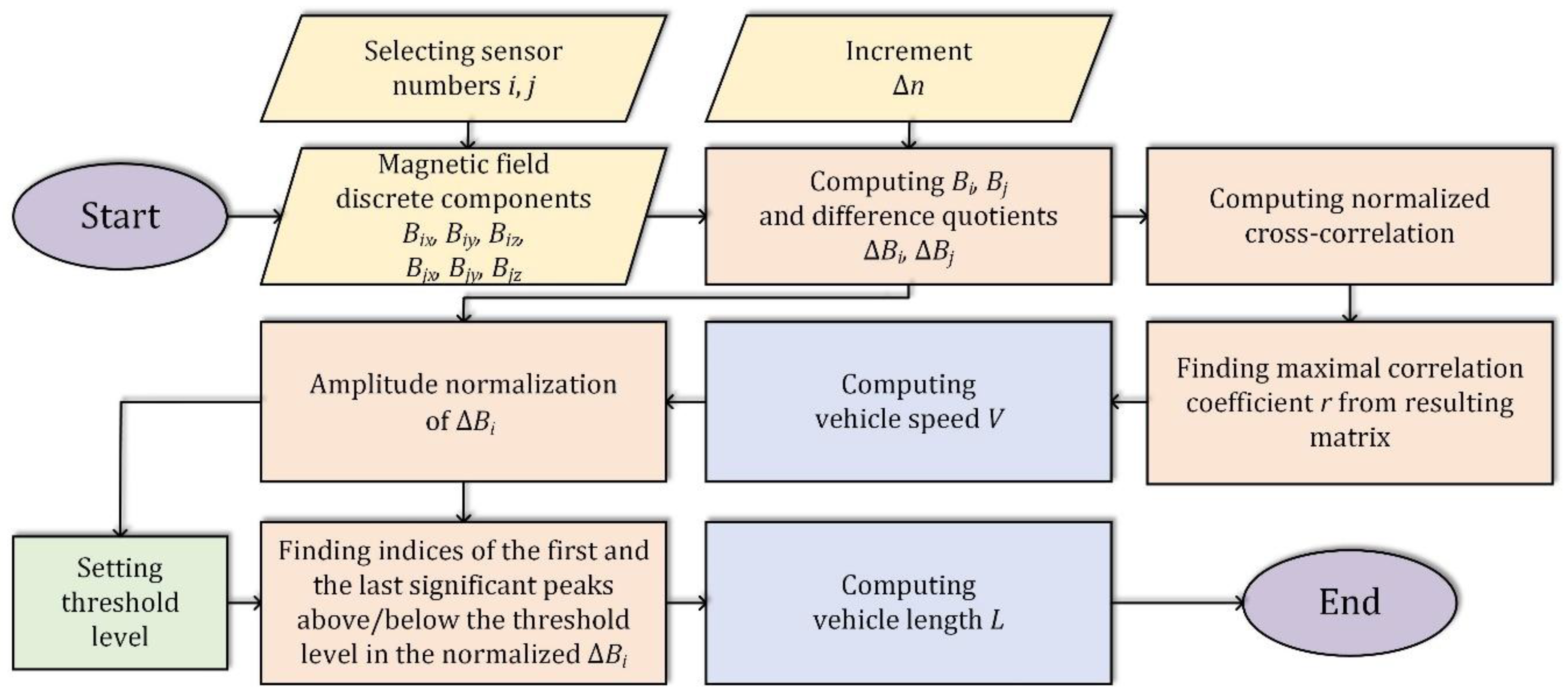
3. Methods to Estimate Vehicle Speed and Length
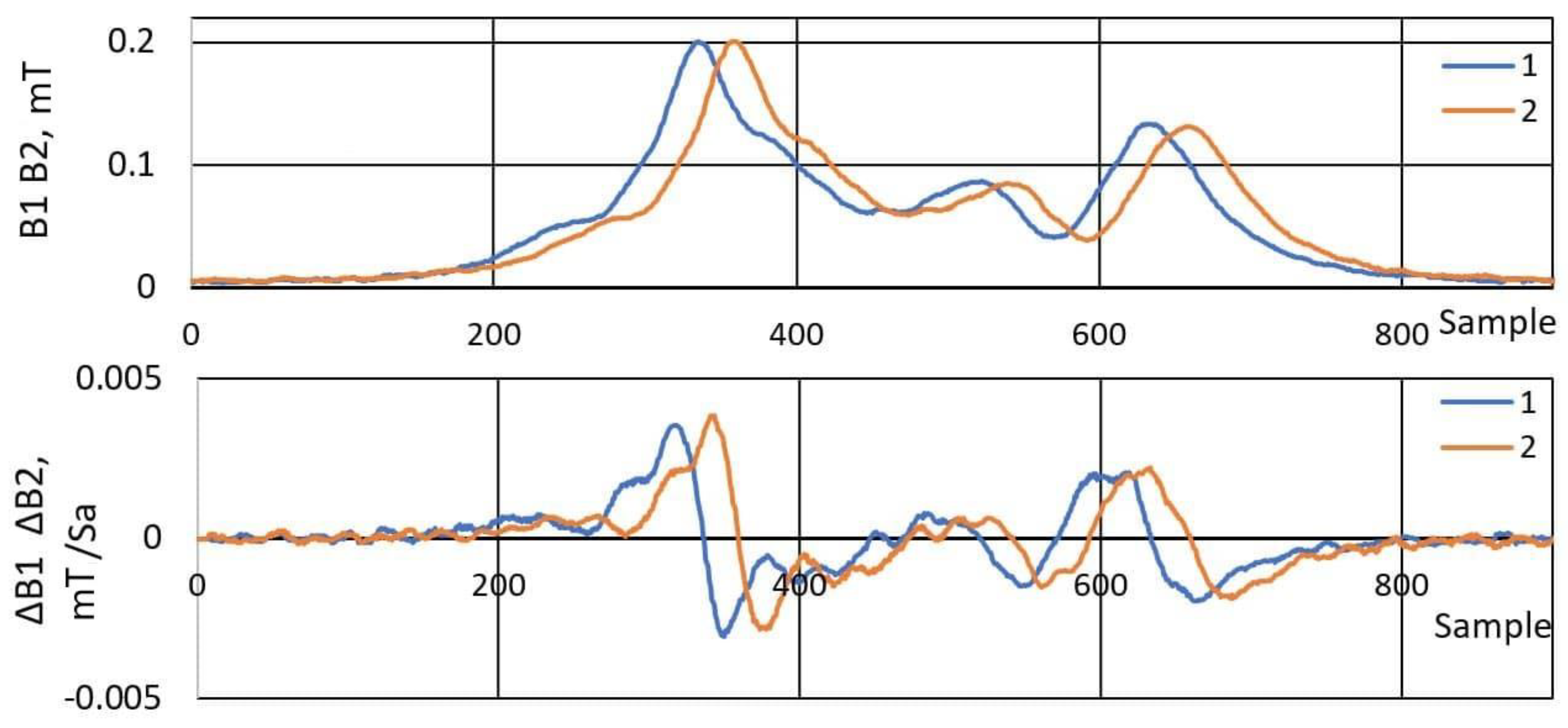
3.1. Speed Estimation Method
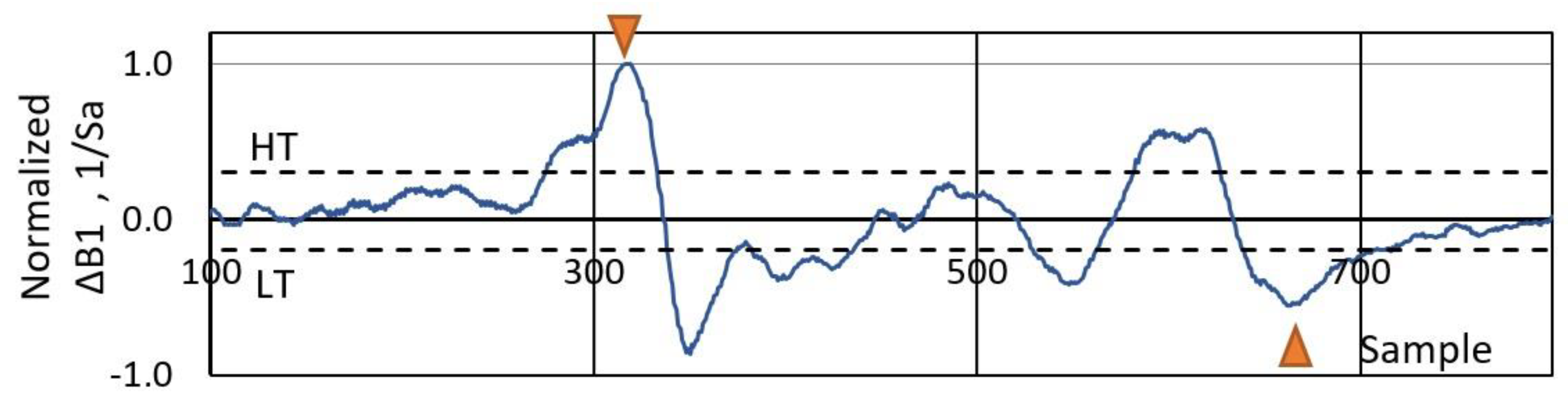
3.2. Length Estimation Method
4. Results
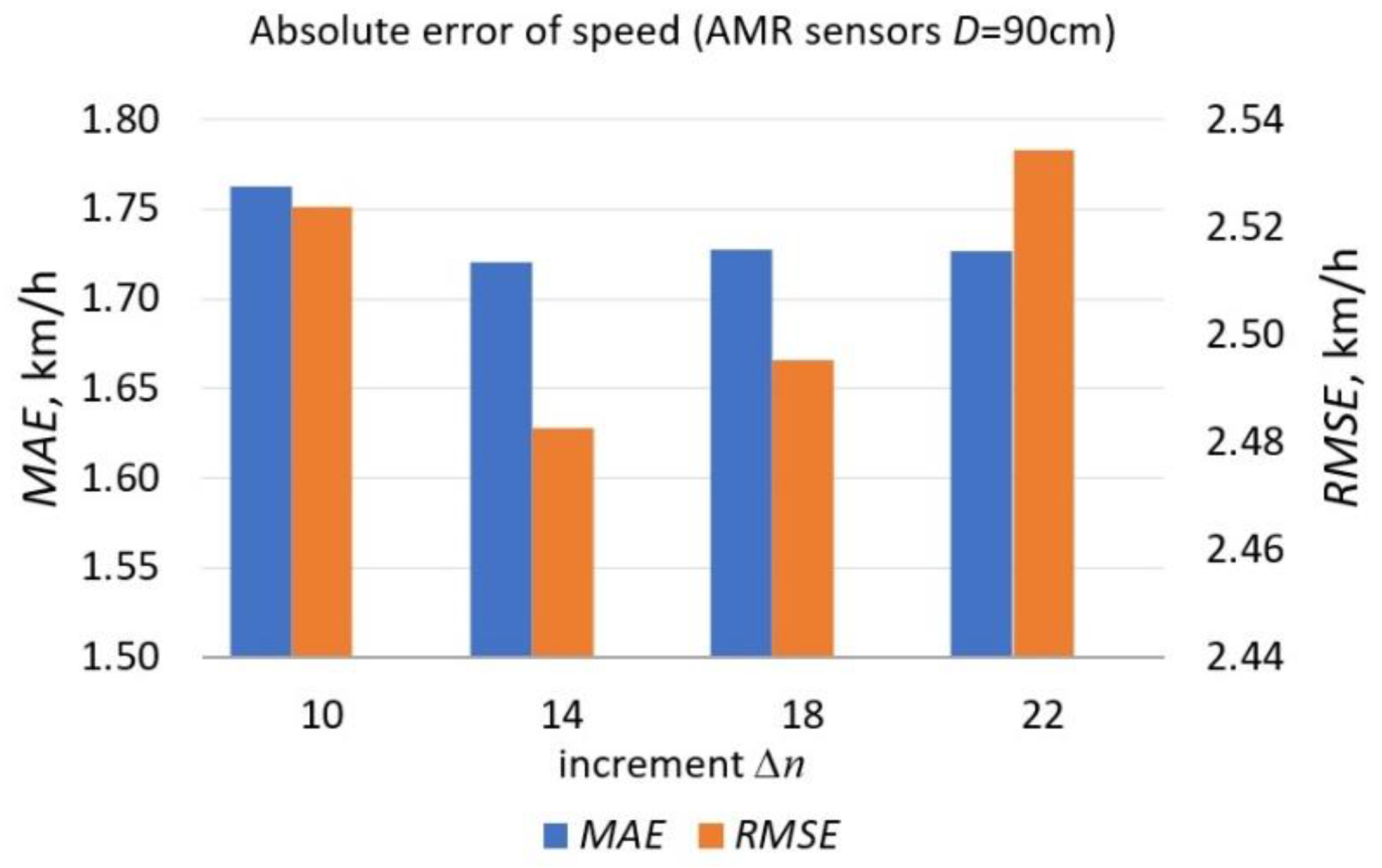
4.1. Speed Estimation Error
4.2. Length Estimation Error
4.3. Correction Factor of Estimated Length
4.4. Summary
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Guerrero-Ibanez, J.; Zeadally, S.; Contreras-Castillo, J. Sensor Technologies for Intelligent Transportation Systems. Sensors 2018, 18, 1212. [Google Scholar] [CrossRef] [PubMed]
- Hott, M.; Hoeher, P.A.; Reinecke, S.F. Magnetic Communication Using High-Sensitivity Magnetic Field Detectors. Sensors 2019, 19, 3415. [Google Scholar] [CrossRef] [PubMed]
- Nishibe, Y.; Ohta, N. Thin Film Magnetic Field Sensor Utilizing Magneto Impedance Effect. R D Rev. Toyota CRDL 2000, 35, 1–7. [Google Scholar] [CrossRef]
- Nishibe, Y.; Ohta, N.; Tsukada, K.; Yamadera, H.; Nonomura, Y.; Mohri, K.; Uchiyama, T. Sensing of Passing Vehicles Using a Lane Marker on a Road With Built-In Thin-Film MI Sensor and Power Source. IEEE Trans. Veh. Technol. 2004, 53, 1827–1834. [Google Scholar] [CrossRef]
- Belenguer, F.M.; Salcedo, A.M.; Ibanez, A.G.; Sánchez, V.M. Advantages offered by the double magnetic loops versus the conventional single ones. PLoS ONE 2019, 14, e0211626. [Google Scholar] [CrossRef]
- Hu, Y.; Kang, W.; Fang, Y.; Xie, L.; Qiu, L.; Jin, T. Piezoelectric Poly(vinylidene fluoride) (PVDF) Polymer-Based Sensor for Wrist Motion Signal Detection. Appl. Sci. 2018, 8, 836. [Google Scholar] [CrossRef]
- Burnos, P.; Rys, D. The Effect of Flexible Pavement Mechanics on the Accuracy of Axle Load Sensors in Vehicle Weigh-in-Motion Systems. Sensors 2017, 17, 2053. [Google Scholar] [CrossRef]
- Gajda, J.; Burnos, P.; Sroka, R. Accuracy Assessment of Weigh-in-Motion Systems for Vehicle’s Direct Enforcement. IEEE Intell. Transp. Syst. Mag. 2018, 10, 88–94. [Google Scholar] [CrossRef]
- Markevicius, V.; Navikas, D.; Idzkowski, A.; Valinevicius, A.; Zilys, M.; Andriukaitis, D. Vehicle Speed and Length Estimation Using Data from Two Anisotropic Magneto-Resistive (AMR) Sensors. Sensors 2017, 17, 1778. [Google Scholar] [CrossRef]
- Markevicius, V.; Navikas, D.; Idzkowski, A.; Andriukaitis, D.; Valinevicius, A.; Zilys, M. Practical Methods for Vehicle Speed Estimation Using a Microprocessor-Embedded System with AMR Sensors. Sensors 2018, 7, 2225. [Google Scholar] [CrossRef]
- Markevicius, V.; Navikas, D.; Idzkowski, A.; Valinevicius, A.; Zilys, M.; Janeliauskas, A.; Walendziuk, W.; Andriukaitis, D. An Effective Method of Vehicle Speed Evaluation in Systems Using Anisotropic Magneto-Resistive Sensors. IEEE Intell. Transp. Syst. Mag. 2019. [Google Scholar] [CrossRef]
- Klein, L.A.; Mills, M.K.; Gibson, D.R.P. Traffic Detector Handbook: Third Edition-Volume I; Federal Highway Administration: McLean, VA, USA, 2006.
- Bozuyla, M.; Tola, A.T.; Murat, Y.S. A Novel Safe Merging Algorithm for Connected Vehicles Using NetLogo. Elektron. Elektrotechnika 2018, 24, 3–7. [Google Scholar] [CrossRef]
- Bokare, P.S.; Maurya, A.K. Acceleration-Deceleration Behaviour of Various Vehicle Types. Transp. Res. Procedia 2017, 25, 4733–4749. [Google Scholar] [CrossRef]
- Misra, R.; Bora, A.; Dewangan, G. Estimation of error on the cross-correlation, phase and time lag between evenly sampled light curves. Astron. Comput. 2018, 23, 83–91. [Google Scholar] [CrossRef]
- Tamim, N.S.M.; Ghani, F. Techniques for Optimization in Time Delay Estimation from Cross Correlation Function. Int. J. Eng. Technol. IJET-IJENS 2010, 10, 69–75. [Google Scholar]
- Hoeschen, B.; Erker, M.; Janson, B.; Medland, R. Best Practices Guidebook: Collecting Short Duration Manual Vehicle Classifications Counts on High Volume Urban Facilities; Federal Highway Administration: Denver, CO, USA, 2005.
- Schulz, L.; Heinisch, P.; Richter, I. Calibration of Off-the-Shelf Anisotropic Magnetoresistance Magnetometers. Sensors 2019, 8, 1850. [Google Scholar] [CrossRef]
- Honkura, Y.; Yamamoto, M.; Hamada, N.; Shimode, A. Magneto-Sensitive Wire, Magneto-Impedance Element and Magneto-Impedance Sensor. Eur. Pat. Appl. EP2276082A1, 2009. [Google Scholar]
- Thakur, A.; Malekian, R. Fog Computing for Detecting Vehicular Congestion, an Internet of Vehicles Based Approach: A Review. IEEE Intell. Transp. Syst. Mag. 2019, 11, 8–16. [Google Scholar] [CrossRef]
- Bugdol, M.; Segiet, Z.; Krecichwost, M.; Kasperek, P. Vehicle detection system using magnetic sensors. Transp. Probl. 2014, 9, 49–60. [Google Scholar]
- Grzechca, D.; Rybka, P.; Paszek, K. Evaluation of the Accuracy of ADAS Module Readings Based on an Analysis of the Transient Supply Current and Neural Network Application. Elektron. Elektrotechnika 2018, 24, 46–52. [Google Scholar] [CrossRef]
- Sarcevic, P.; Pletl, S. False Detection Filtering Method for Magnetic Sensor-Based Vehicle Detection Systems. In Proceedings of the 6th IEEE International Symposium on Intelligent Systems and Informatics, SISY 2018, Subotica, Serbia, 13–15 September 2018; pp. 277–281. [Google Scholar] [CrossRef]
- Xu, C.; Wang, Y.; Bao, X.; Li, F. Vehicle classification using an imbalanced dataset based on a single magnetic sensor. Sensors 2018, 18, 1690. [Google Scholar] [CrossRef] [PubMed]
- Dong, H.; Wang, X.; Zhang, C.; He, R.; Jia, L.; Qin, Y. Improved Robust Vehicle Detection and Identification Based on Single Magnetic Sensor. IEEE Access 2018, 6, 5247–5255. [Google Scholar] [CrossRef]
- Chen, X.; Kong, X.; Xu, M.; Sandrasegaran, K.; Zheng, J. Road Vehicle Detection and Classification Using Magnetic Field Measurement. IEEE Access 2019, 7, 52622–52633. [Google Scholar] [CrossRef]
- Balid, W.; Tafish, H.; Refai, H.H. Intelligent Vehicle Counting and Classification Sensor for Real-Time Traffic Surveillance. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1784–1794. [Google Scholar] [CrossRef]
- Kwon, Y.J.; Kim, D.H.; Choi, K.H. A single node vehicle detection system using an adaptive signal adjustment technique. In Proceedings of the 20th International Symposium on Wireless Personal Multimedia Communications (WPMC), Bali, Indonesia, 17–20 December 2017; pp. 349–353. [Google Scholar]
- Mielczarek, M.; Gajda, J. Individual vehicle speed estimation on the base of magnetic profile analysis —Estymacja indywidualnej prędkości pojazdu na podstawie analizy profilu magnetycznego. Prz. Elektrotechniczny 2015, 3, 186–189. [Google Scholar] [CrossRef]
- Velisavljevic, V.; Cano, E.; Dyo, V.; Allen, B. Wireless Magnetic Sensor Network for Road Traffic Monitoring and Vehicle Classification. Transp. Telecommun. 2016, 17, 274–288. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Number | Reference Speed Vr, km/h | p = 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|---|
| dV_P#1 D = 30 cm, km/h | dV_P#2 D = 30 cm, km/h | dV_S2-S3 D = 30 cm, km/h | dV_S1-S3 D = 60 cm, km/h | dV_S1-S4 D = 90 cm, km/h | ||
| 1 | 87.0 | 0.5 | 0.5 | 0.5 | 0.5 | 0.6 |
| 2 | 94.3 | 3.9 | 3.9 | 3.9 | 0.4 | 1.0 |
| 3 | 90.7 | 3.2 | 0.7 | 3.2 | 1.2 | 0.7 |
| 4 | 63.7 | 1.7 | 3.8 | 1.7 | 1.7 | 1.7 |
| 5 | 61.8 | 0.1 | 0.1 | 1.8 | 0.8 | 0.5 |
| 6 | 103.4 | 0.5 | 4.7 | 4.7 | 2.0 | 1.2 |
| 7 | 82.7 | 3.7 | 0.4 | 3.7 | 2.0 | 1.5 |
| 8 | 88.2 | 1.8 | 1.8 | 1.8 | 1.8 | 0.5 |
| 9 | 85.7 | 4.3 | 2.6 | 4.3 | 4.3 | 0.7 |
| 10 | 88.0 | 2.1 | 1.6 | 2.1 | 2.1 | 0.8 |
| … | … | … | … | … | … | … |
| 290 | 97.2 | 1.0 | 1.0 | 10.8 | 3.3 | 1.0 |
| mean Vr, km/h | MAE1, km/h | MAE2, km/h | MAE3, km/h | MAE4, km/h | MAE5, km/h | |
| 83.2 | 2.5 | 2.2 | 4.6 | 2.4 | 1.7 |
| Speed Range | 45–74.99 km/h | 75–89.99 km/h | 90–130 km/h |
|---|---|---|---|
| MAE1, km/h | 2.0 | 2.7 | 2.6 |
| MAE2, km/h | 1.9 | 2.3 | 2.4 |
| MAE3, km/h | 3.2 | 4.0 | 6.3 |
| MAE4, km/h | 1.8 | 2.2 | 3.1 |
| MAE5, km/h | 1.3 | 1.6 | 2.0 |
| T1 Samples | T2 Samples | T3 Samples | T4 Samples | V5 km/h | L1 m | L3 m | Vr km/h | Lr m | W m | W/Lr - | G m |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 585 | 506 | 566 | 599 | 88.77 | 7.13 | 6.89 | 87.70 | 4.32 | 2.690 | 0.62 | 0.130 |
| 440 | 489 | 442 | 470 | 98.18 | 5.76 | 5.79 | 94.29 | 3.86 | 2.500 | 0.65 | 0.150 |
| 368 | 534 | 491 | 370 | 93.91 | 4.76 | 6.34 | 93.04 | 4.59 | 2.625 | 0.57 | 0.119 |
| 356 | 391 | 364 | 434 | 93.91 | 4.57 | 4.67 | 92.37 | 4.40 | 2.678 | 0.61 | 0.201 |
| 546 | 572 | 564 | 468 | 90.00 | 6.68 | 6.90 | 88.10 | 4.93 | 2.843 | 0.58 | 0.165 |
| 577 | 606 | 556 | 659 | 84.16 | 6.53 | 6.29 | 81.49 | 4.32 | 2.694 | 0.62 | 0.150 |
| 399 | 406 | 449 | 430 | 81.00 | 4.67 | 5.25 | 84.22 | 4.81 | 2.857 | 0.59 | 0.218 |
| 487 | 608 | 576 | 589 | 85.26 | 5.68 | 6.72 | 83.99 | 4.64 | 2.835 | 0.61 | 0.150 |
| 479 | 462 | 477 | 541 | 96.72 | 6.46 | 6.43 | 97.03 | 4.82 | 2.854 | 0.59 | 0.155 |
| 417 | 390 | 419 | 458 | 102.86 | 5.49 | 5.51 | 94.73 | 4.22 | 2.578 | 0.61 | 0.178 |
| class | A | B | C | D | E |
|---|---|---|---|---|---|
| Lr ≥ 3.5 and Lr < 4.5 m | Lr ≥ 4.5 and Lr < 4.7 m | Lr ≥ 4.7 and Lr < 5.2 m | Lr ≥ 5.2 and Lr < 8.0 m | Lr ≥ 8.0 m | |
| max W/Lr | 0.66 | 0.61 | 0.61 | 0.69 | 0.89 |
| min W/Lr | 0.57 | 0.56 | 0.56 | 0.54 | 0.53 |
| mean W/Lr | 0.61 | 0.59 | 0.58 | 0.62 | 0.71 |
| class A—city cars, small passenger cars, compact SUVs | |||||
| Error (m) | all W/Lr all G | all W/Lr G ≤ 0.13 m | all W/Lr G ≥ 0.18 m | W/Lr < 0.61 all G | W/Lr < 0.61 G ≤ 0.13 m |
| MAEL1 | 1.14 | 1.16 | 1.37 | 1.31 | 1.22 |
| MAEL3 | 1.49 | 1.66 | 1.39 | 1.62 | 1.83 |
| class B—family cars, mid-size SUVs | |||||
| Error (m) | all W/Lr all G | all W/Lr G ≤ 0.13 m | all W/Lr G ≥ 0.18 m | W/Lr ≥ 0.59 all G | W/Lr ≥ 0.59 G ≥ 0.18 m |
| MAEL1 | 1.30 | 1.20 | 1.74 | 1.65 | 1.87 |
| MAEL3 | 1.58 | 1.15 | 2.10 | 1.52 | 2.23 |
| class C—executive cars, luxury cars, large SUVs | |||||
| Error (m) | all W/Lr all G | all W/Lr G ≤ 0.13 m | all W/Lr G ≥ 0.18 m | W/Lr ≥ 0.58 G ≤ 0.13 m | W/Lr ≥ 0.58 G ≥ 0.18 m |
| MAEL1 | 0.96 | 0.51 | 1.95 | 0.44 | 1.92 |
| MAEL3 | 1.05 | 0.66 | 2.06 | 0.49 | 2.06 |
| class D | class E | all classes of vehicles (A, B, C, D, E) | |||
| Error (m) | all W/Lr all G | all W/Lr all G | all W/Lr all G | W/L < 0.61 all G | W/Lr ≥ 0.61 all G |
| MAEL1 | 1.95 | 2.89 | 1.48 | 1.21 | 2.06 |
| MAEL3 | 2.16 | 2.93 | 1.68 | 1.40 | 2.27 |
| all classes of vehicles (A, B, C, D, E) | |||
| Error (m) | all W/Lr all G | W/L < 0.61 all G | W/Lr ≥ 0.61 all G |
| fixed threshold-based method (signals not differentiated, HT = 0.03 mT) | |||
| MAEL1 | 1.76 | 1.54 | 2.17 |
| MAEL3 | 1.75 | 1.55 | 2.13 |
| fixed threshold-based method (signals not differentiated, HT = 0.06 mT) | |||
| MAEL1 | 1.43 | 1.00 | 2.44 |
| MAEL3 | 1.42 | 0.95 | 2.57 |
| adaptive two-extreme-peak detection method (signals differentiated, Δn = 14, HT = 0.1 hdsp) | |||
| MAEL1 | 1.48 | 1.21 | 2.06 |
| MAEL3 | 1.68 | 1.40 | 2.27 |
| all classes of vehicles (A, B, C, D, E) | |||
| Error (m) | all W/Lr all G | W/L < 0.61 all G | W/Lr ≥ 0.61 all G |
| adaptive two-extreme-peak detection method (signals differentiated, Δn = 14, HT = 0.1 hdsp) | |||
| MAEL1 | 0.70 | 0.64 | 0.80 |
| MAEL3 | 0.75 | 0.67 | 0.92 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Markevicius, V.; Navikas, D.; Idzkowski, A.; Miklusis, D.; Andriukaitis, D.; Valinevicius, A.; Zilys, M.; Cepenas, M.; Walendziuk, W. Vehicle Speed and Length Estimation Errors Using the Intelligent Transportation System with a Set of Anisotropic Magneto-Resistive (AMR) Sensors. Sensors 2019, 19, 5234. https://doi.org/10.3390/s19235234
Markevicius V, Navikas D, Idzkowski A, Miklusis D, Andriukaitis D, Valinevicius A, Zilys M, Cepenas M, Walendziuk W. Vehicle Speed and Length Estimation Errors Using the Intelligent Transportation System with a Set of Anisotropic Magneto-Resistive (AMR) Sensors. Sensors. 2019; 19(23):5234. https://doi.org/10.3390/s19235234
Chicago/Turabian StyleMarkevicius, Vytautas, Dangirutis Navikas, Adam Idzkowski, Donatas Miklusis, Darius Andriukaitis, Algimantas Valinevicius, Mindaugas Zilys, Mindaugas Cepenas, and Wojciech Walendziuk. 2019. "Vehicle Speed and Length Estimation Errors Using the Intelligent Transportation System with a Set of Anisotropic Magneto-Resistive (AMR) Sensors" Sensors 19, no. 23: 5234. https://doi.org/10.3390/s19235234
APA StyleMarkevicius, V., Navikas, D., Idzkowski, A., Miklusis, D., Andriukaitis, D., Valinevicius, A., Zilys, M., Cepenas, M., & Walendziuk, W. (2019). Vehicle Speed and Length Estimation Errors Using the Intelligent Transportation System with a Set of Anisotropic Magneto-Resistive (AMR) Sensors. Sensors, 19(23), 5234. https://doi.org/10.3390/s19235234