4.1. Methodology
To evaluate the behavior of our proposed solution, we have used the simulation of urban mobility (SUMO) [
29] for scenario construction, Omnet++ [
30] along with Veins framework [
31] for vehicles communication and python scripts for statistical computing. Hence, it was possible to define all vehicle mobility and all vehicular network parameters according to the IEEE 802.11p standard. The parameters used in the simulations are described in
Table 2.
Concerning the network topology, we took into account that all vehicles are inside their communication range. Thereby, each vehicle is capable of communicating with each other. Thus, vehicles can exchange both their location information given by GPS and the sensor distance information. When one vehicle receives this information, it can start the computation process by constructing the needed matrices and computing the proposed method CoVaLID.
Moreover, to compare the approaches fairly, we had to make some adjustments to the VLOCI algorithm since in the original approach, the network is static, i.e., vehicles were set to be stationary. Thus, in our simulations, all vehicles were set up with constant velocity in an intersection scenario, and the number of iterations was the same as used in [
24]. Hence, we considered that all the vehicles had an acceleration equal to zero. Also, the target vehicle is the one in the front, and its neighbors are lined up, and lastly, their trajectories were defined in the north/south direction.
We evaluate the accuracy of our proposed solution related to the impact of three different aspects. First, concerning the number of vehicles, to verify the behavior of the presented solution, we used multiple increasing values. Second, to evaluate the impact of the trajectory on the accuracy over the tested approaches, it was divided into two parts, straight-line and curve. Finally, to verify how the noise in distance measurements can affect the proposed solution, we evaluated the impact of distance information error.
4.2. Analysis of the Error
To evaluate our proposed solution, we conducted an analysis using the root-mean-square-error (RMSE) method, described in (Equation (
21)). This metric is commonly used to measure the error of the localization approaches.
where
and
are respectively the perfect and estimated vehicles’ positions, while the latter varies between GPS, VLOCI, and CoVaLID.
Furthermore, we used the mean absolute error (MAE) as a metric to evaluate our method since some works in literature [
24,
32,
33,
34] also use it to assess their results.
where
and
are respectively the perfect and estimated vehicles’ coordinates, while the latter varies between GPS, VLOCI, and CoVaLID. In Equation (
22), we compute the MAE for one axis to simplify the explanation. However, it is suitable for as many axes as necessary.
4.3. Simulation Scenario
In this section, we used a simple intersection scenario to evaluate the performance of our proposed localization solution. In this scenario, vehicles can move in a straight-line road. Furthermore, we used RMSE and MAE to assess the accuracy of the VLOCI, CoVaLID, and GPS regarding the impact of GPS error, the increasing of the number of vehicles, and distance among vehicles. Then, both the results and discussion about them are presented.
4.3.1. Accuracy Evaluation
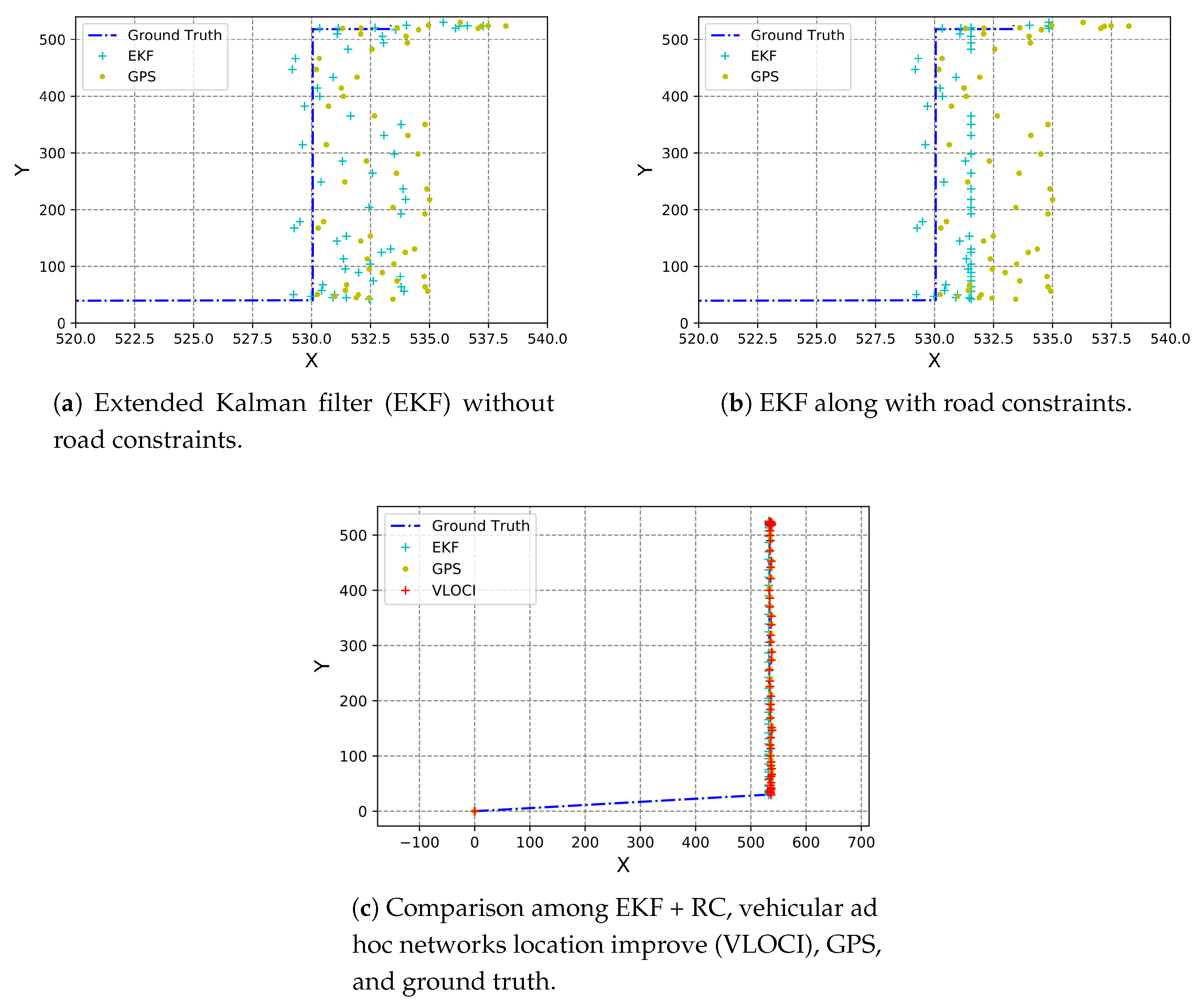
In this section, we compare the results of our proposed solution to the initial GPS inaccurate coordinates, to the VLOCI algorithm, and also to the perfect position of vehicles. For this, we plotted graphs with vehicles’ positions as a result of each cited approach. In these graphs, the yellow circle represents GPS position, whereas the cyan cross, the red cross, and the blue line denote, respectively, CoVaLID, VLOCI, and the ground truth position.
As shown in
Figure 4a, our proposed solution was able to improve the GPS positions. However, sometimes, those estimations still put the vehicle outside the road. So, we apply the road constraints, as described in
Section 3.5, in our data fusion solution, resulting in a more accurate estimation, as seen in
Figure 4b. Also, it is noticeable that the trajectory of the vehicle using CoVaLID + RC is similar to the ground truth. According to
Table 3, the CoVaLID + RC, called just CoVaLID from now on, is capable of reducing
x-axis and
y-axis GPS positioning error on average in 62% and 22%, respectively. Another interesting point in
Table 3 is that the VLOCI algorithm had better performance when compared to CoVaLID without road constraints (RC). It can be explained due to the fact that we made some adjustments in the VLOCI original approach, and one of them was to use road constraints. So, VLOCI was already using RC, while CoVaLID not.
We noticed, for this scenario, that the VLOCI algorithm improved its accuracy when compared to the results presented by Farhan [
24] due to the adjusts that we made. It is important to mention that the VLOCI approach assumes that vehicles are traveling in one lane and in the same direction. Hence, the values in both, RMSE and MAE are the same in the
x-axis for VLOCI and GPS techniques. So, when comparing our CoVaLID solution to the VLOCI, in terms of accuracy in the
y-axis, our approach outperforms VLOCI by at least 11%, reducing the error from 1.85 m to 1.64 m. We can also observe differences between values when the axis changes. It can be explained due to the fact that we assume the error in both axes is proportional, which may not true in real-world scenarios.
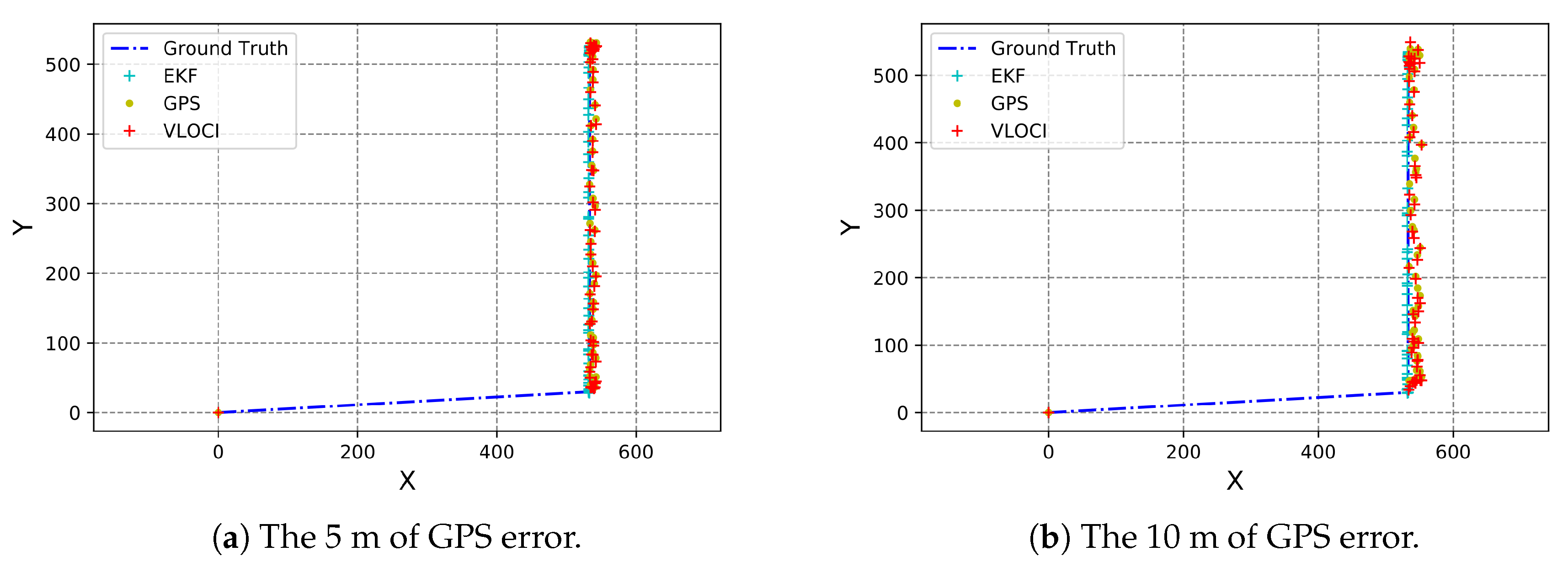
4.3.2. The Impact of GPS Error
To study the impact of GPS error regarding the accuracy of the tested solutions, we varied the GPS error parameter by 1, 5, and 10 m, respectively.
We can see that in the one-meter GPS error scenario, the CoVaLID, VLOCI, and GPS trajectories are almost the same as the ground truth, as shown in
Figure 5a. However, our proposed solution is slightly better when compared to the other techniques. When the GPS error increased to 5 and 10 m, respectively, both CoVaLID and VLOCI could still reduce and improve the GPS localization. Besides, our proposed solution, CoVaLID reached its best performance in 10 m of GPS error scenario, minimizing it on average of both axes in 58% when compared to GPS, and 51% when compared to VLOCI. It is worth mentioning that when the GPS error increases, the trajectory of VLOCI algorithm is quite different than the ground truth, as seen in
Figure 5b, while the CoVaLID maintained its trajectory similar to the ground truth.
In
Table 4,
Table 5 and
Table 6, we can notice that our proposed solution obtained the least RMSE values in all cases when compared to both GPS and VLOCI.
We can also notice that albeit VLOCI had improved its performance when the GPS error increased from 1 to 10 m, the algorithm depends on the GPS accuracy, in other words, the more accurate the GPS device is, the more efficient VLOCI can be. Our proposed solution demonstrated similar behavior since it is also a GPS assisted approach. However, CoVaLID shows to be efficient in all evaluated scenarios.
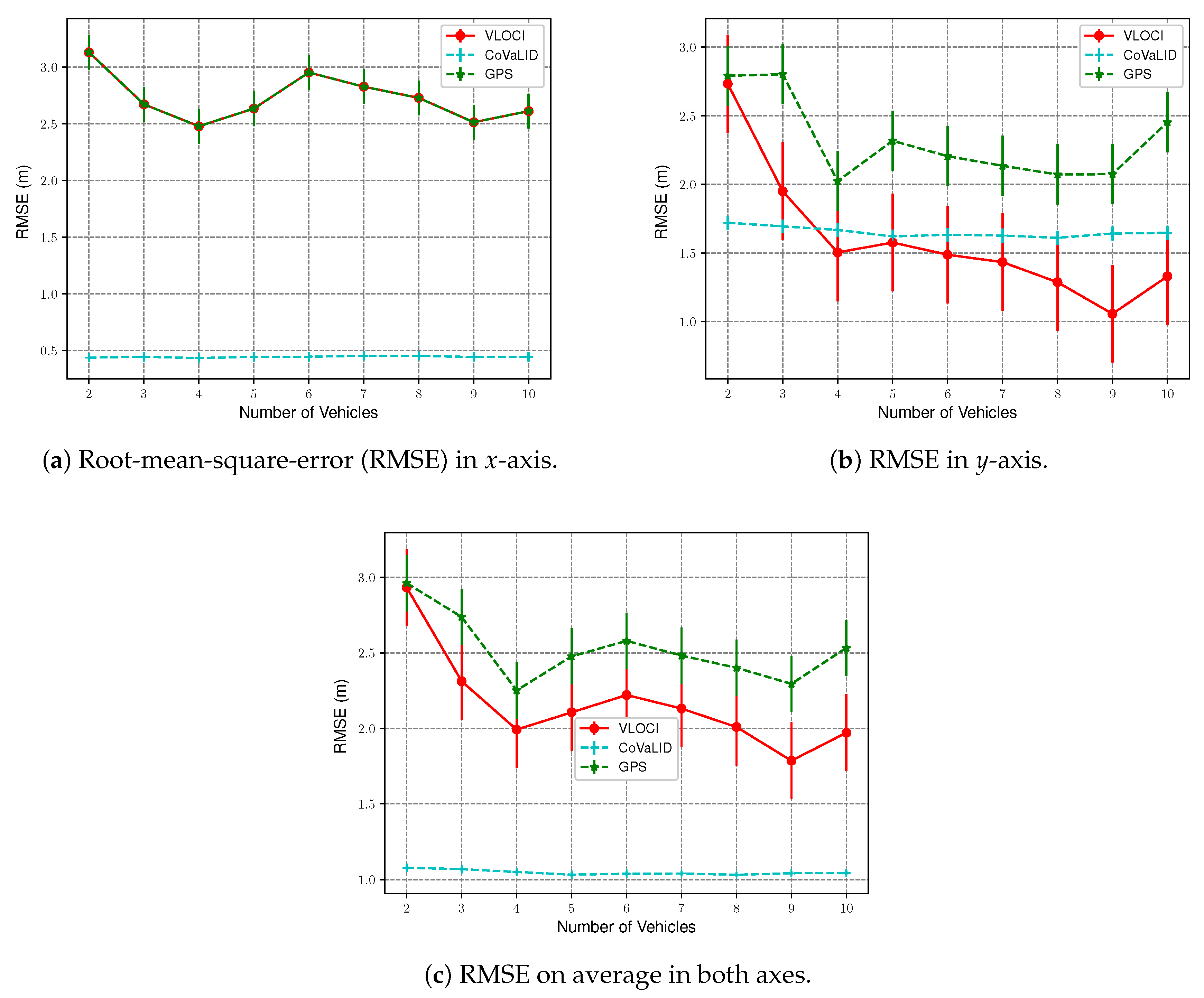
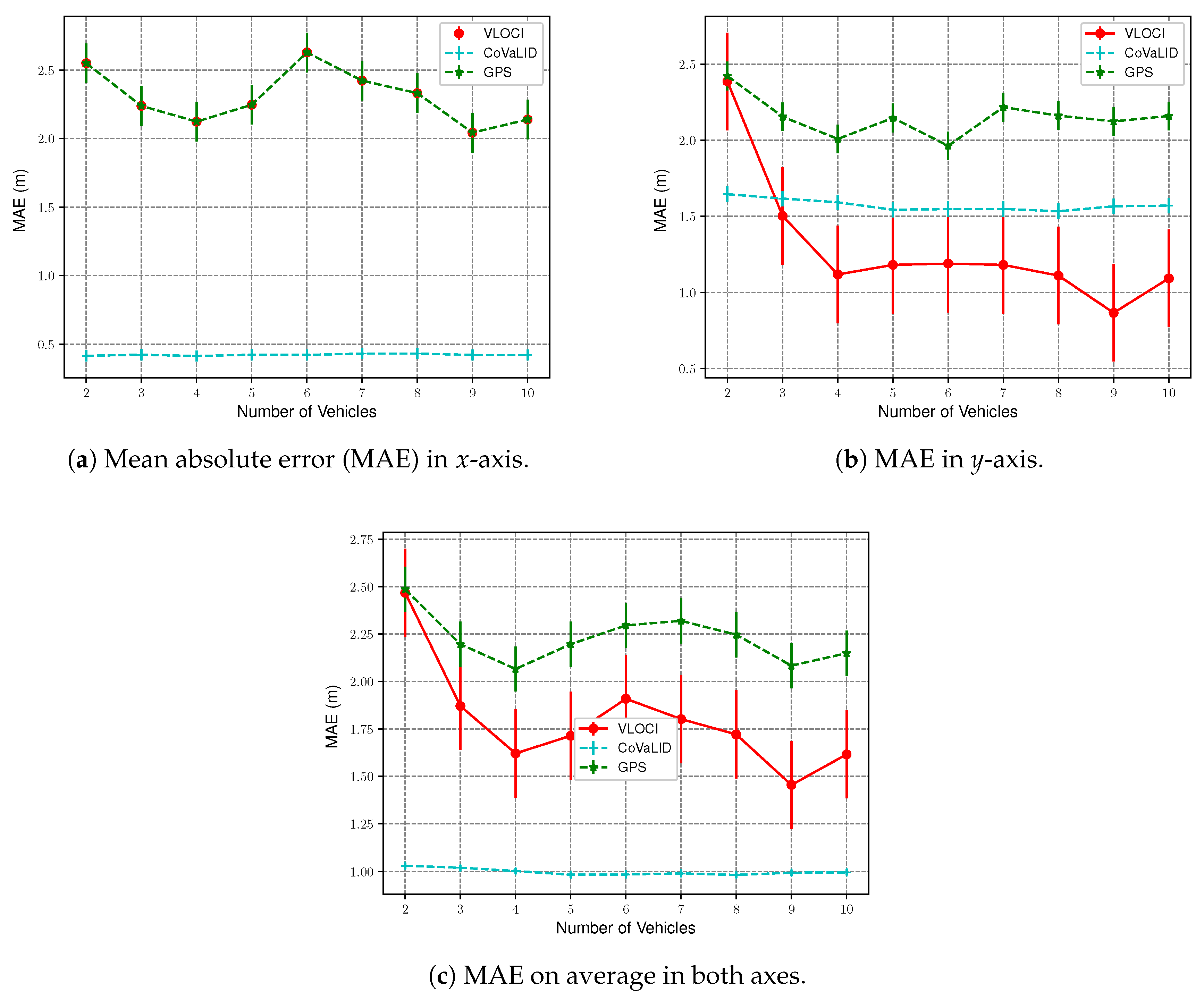
4.3.3. The Impact of Number of Vehicles
To assess the impact of the number of vehicles in all tested approaches, we kept the GPS error constant at 2 m, while the number of vehicles was increased from 2 to 10. Furthermore, we maintained the distance constant among all neighbors regarding the target vehicle in 30 m. To evaluate the performance of each technique, we took into account both the RMSE and MAE values regarding the x-axis and y-axis, separately, as well as the average between both axes. All graphs presented in this section were plotted with 95% confidence interval.
The RMSE and MAE values show that our proposed method had better performance in all evaluated scenarios when compared to both VLOCI and GPS regarding the
x-axis. This result is expected since in
x-axis both have the same values, as presented in
Figure 6a and
Figure 7a.
Another interesting point is that when the number of vehicles increases to 3, MAE values demonstrated that the VLOCI algorithm could overcome CoVaLID regarding the
y-axis, as shown in
Figure 7b. However, according to RMSE values, the VLOCI algorithm overcomes our proposed method only when the number of vehicles is increased to 4, and maintained its better performance for the remainder of the tested scenarios, as seen in
Figure 6b. It suggests that when the number of vehicles increases, better accuracy is achieved in the
y-axis by VLOCI. Also, it is worth pointing out that although our solution was overcome by VLOCI when the number of vehicles increased, our method maintained RMSE and MAE values almost constant.
Figure 6c and
Figure 7c show the average error of both axes. We can notice that our proposed method had better results in all tested scenarios when compared to both VLOCI and GPS. It can be explained by the fact that CoVaLID uses distance information to minimize the GPS error in both axes, while the VLOCI algorithm only improves the error in one axis.
Overall, the results support that our method can be used to circumvent the real-time position estimation problem in VANets using fewer vehicles than the VLOCI algorithm.
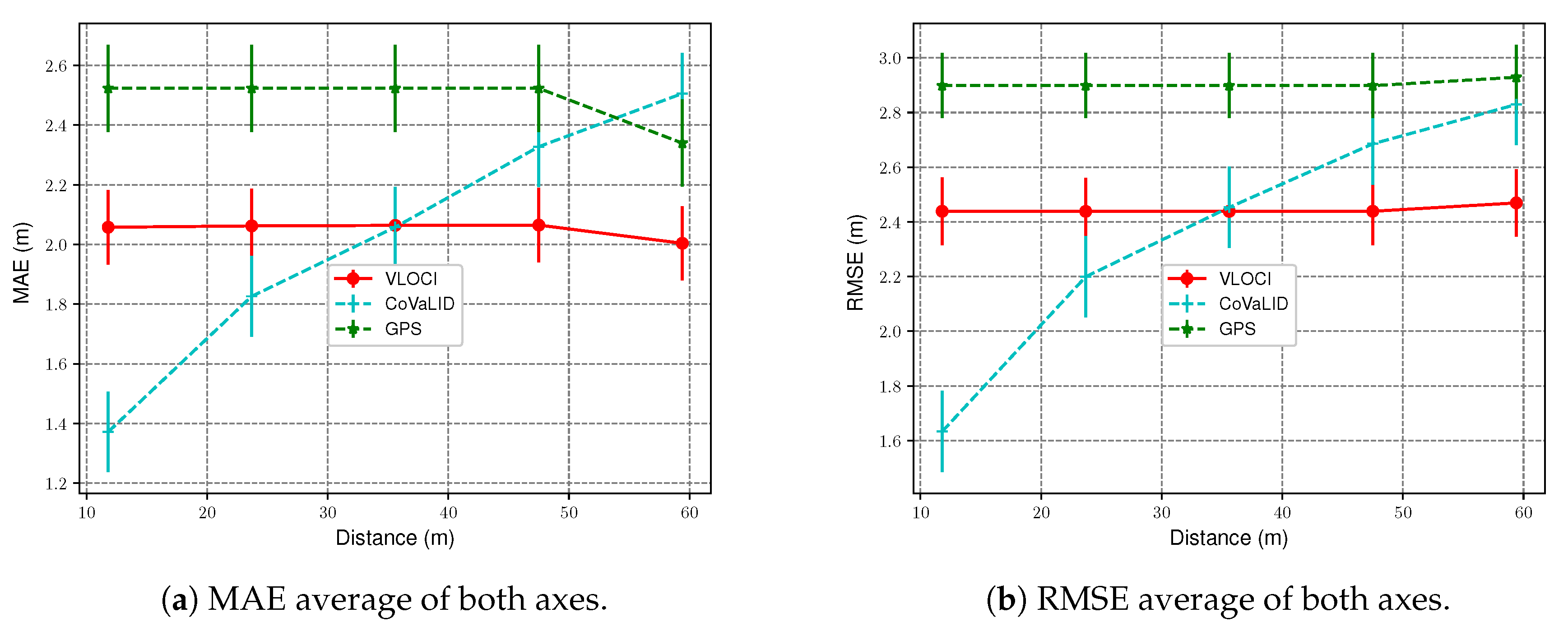
4.3.4. The Impact of Distance Values
To evaluate the impact of the distance between two vehicles in the RMSE and MAE values, we kept the GPS error at 2 m and increased the distance between them. The distance values used in this scenario were: 11.8, 23.7, 35.6, 47.5, and 59.4 m. All graphs presented in this section were plotted with a 95% confidence interval.
Figure 8a,b show the RMSE and MAE values of the average of both axes. We can notice that CoVaLID is directly affected when the distance between neighbors increases. However, our proposed approach had better performance when compared to the VLOCI for vehicles near the target. Although, for long distances between the vehicles, more specifically when the range is greater than 35 m, the VLOCI overcomes our proposed solution.
An interesting point that we can observe is that when increased distance values, the VLOCI algorithm is not affected. This fact can be explained because this algorithm uses the weighted average technique. VLOCI puts more weight in small distance values while putting less weight for higher distances, which means that VLOCI is capable of keeping its performance constant even with different distances between the target vehicle and its neighbors.
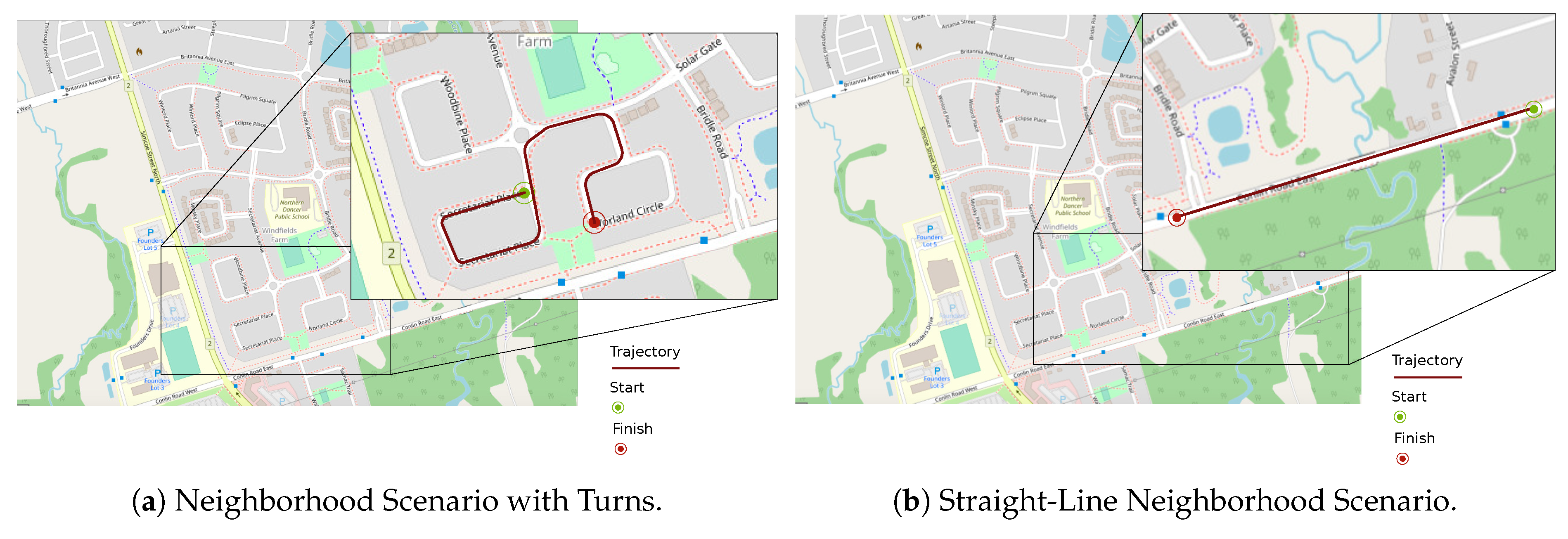
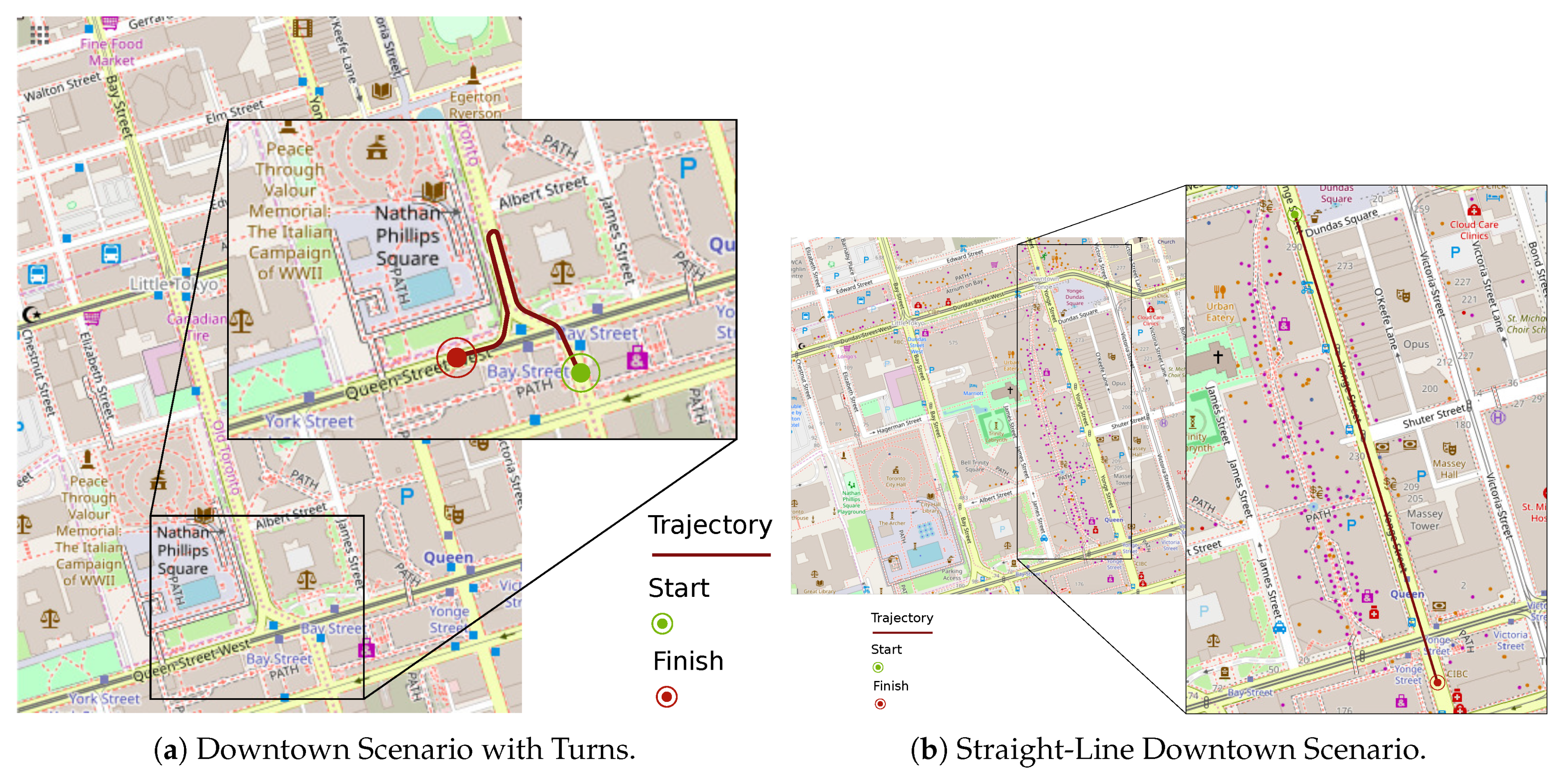
4.4. Real World Scenarios
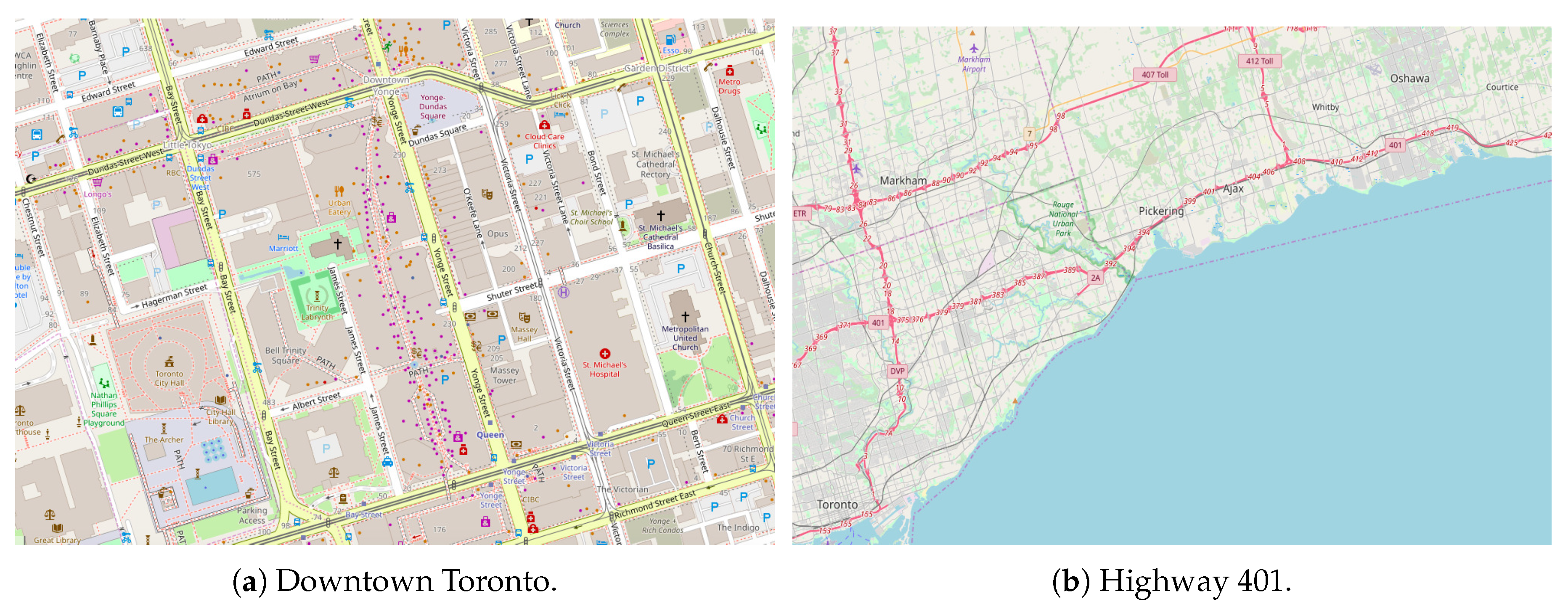
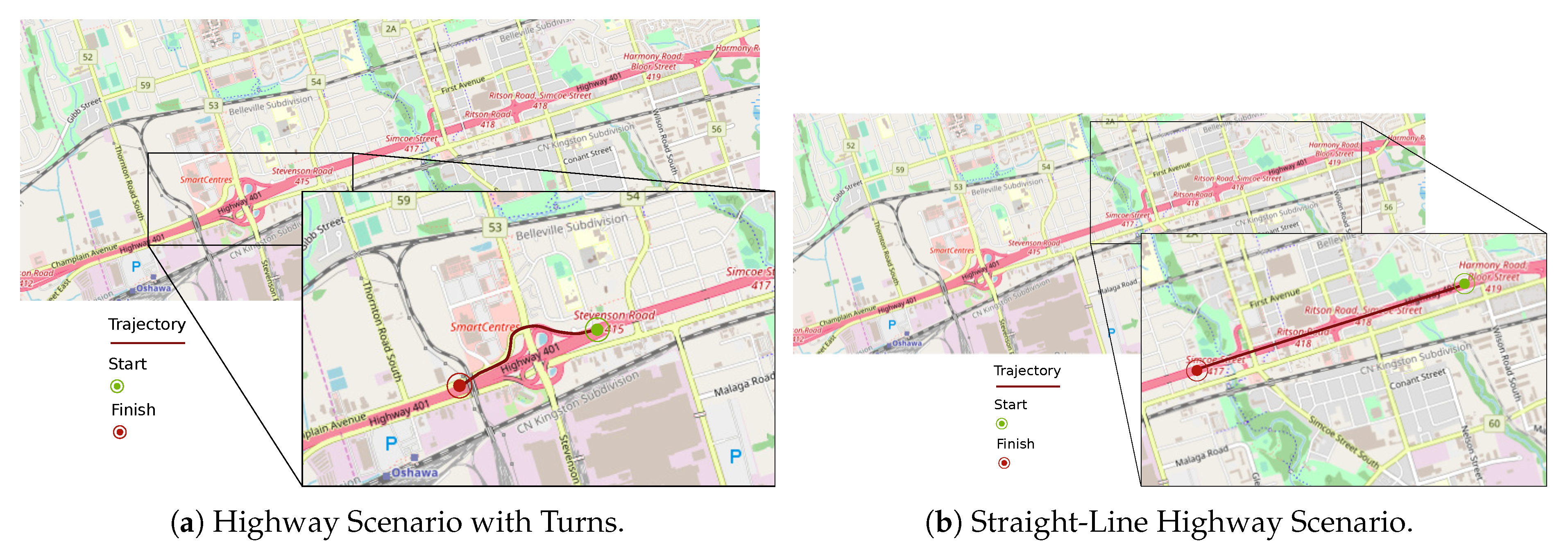
This section aims at evaluating the CoVaLID, VLOCI, and GPS methods in real-world scenarios. Thus, we used three different scenarios: downtown, highway, and neighborhood. The
Figure 9a shows Downtown Toronto, which we took as scenario the most famous streets with a considerable amount of traffic, such as Dundas St., Yonge St., Church St., Queen St. and Bay St. In order to use a highway scenario, we chose Highway 401 (seen in
Figure 9b) which has heavy traffic once it does not charge tolls. Finally, as the neighborhood scenario, we took into account the one named Windfields Farm that is close to the UOIT north campus, as we can notice in
Figure 9c.
Furthermore, since the RMSE and MAE values demonstrated similar behavior, we will only use the RMSE values to assess the accuracy of the VLOCI, CoVaLID, and GPS regarding the impact of increasing the number of vehicles, the distance information error, and the distance among vehicles in simulation scenarios. From now on, we are using our proposed solution CoVaLID along with the weighted average from
Section 3.3. Also, as before, all graphs presented were plotted with a 95% confidence interval.
4.4.1. The Impact of Number of Vehicles
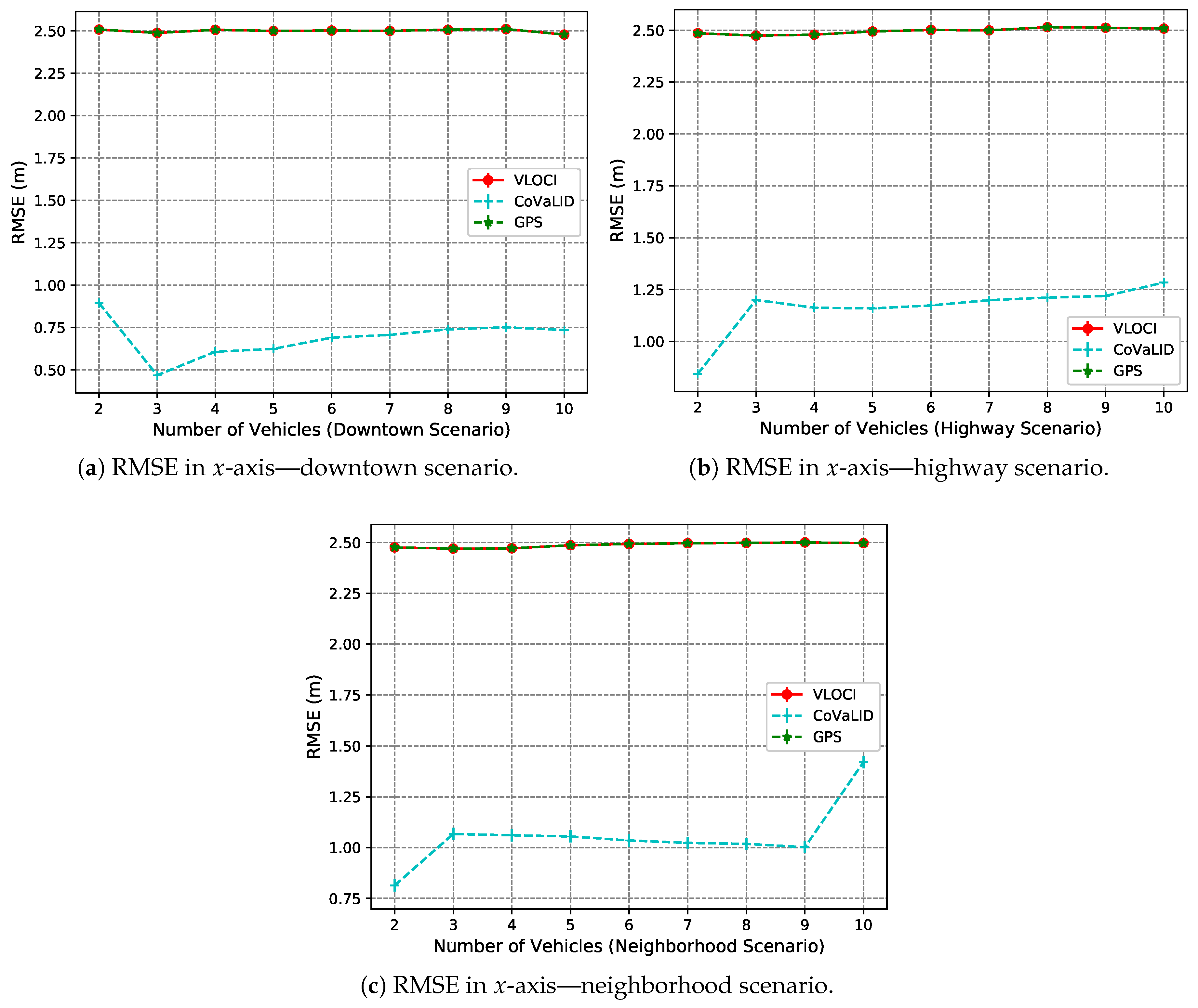
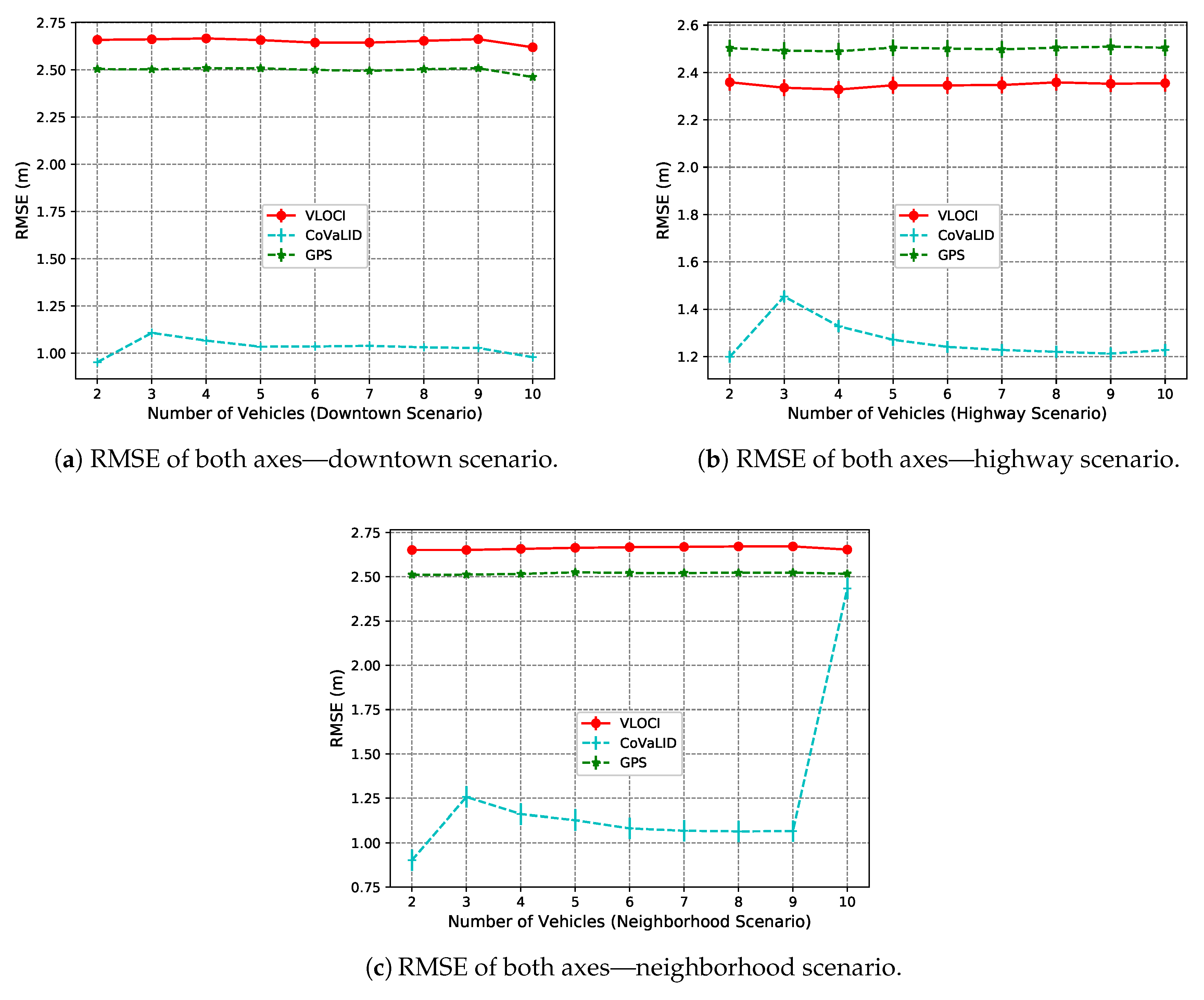
In this section, we kept the GPS error constant at 2 m, while the number of vehicles was increased from 2 to 10. Furthermore, both the distance among vehicles and vehicles’ velocities were set randomly. To evaluate the performance of each technique, we took into account both the RMSE values regarding the x-axis, the y-axis, as well the average between both axes.
As we can see in
Figure 10a–c the VLOCI and GPS had the same value as explained in
Section 4.3.1. Furthermore, we can notice that the CoVaLID had its best performance regarding the
x-axis in the downtown scenario, while in the highway, it performed with accuracy almost constant, as well in neighborhood scenario, except when increased the number of vehicles for 10. The best accuracy in the downtown scenario can be explained because, in a highway scenario, the vehicle velocity is higher. Hence, the higher the velocity, the more affected is our proposed approach in the
x-axis.
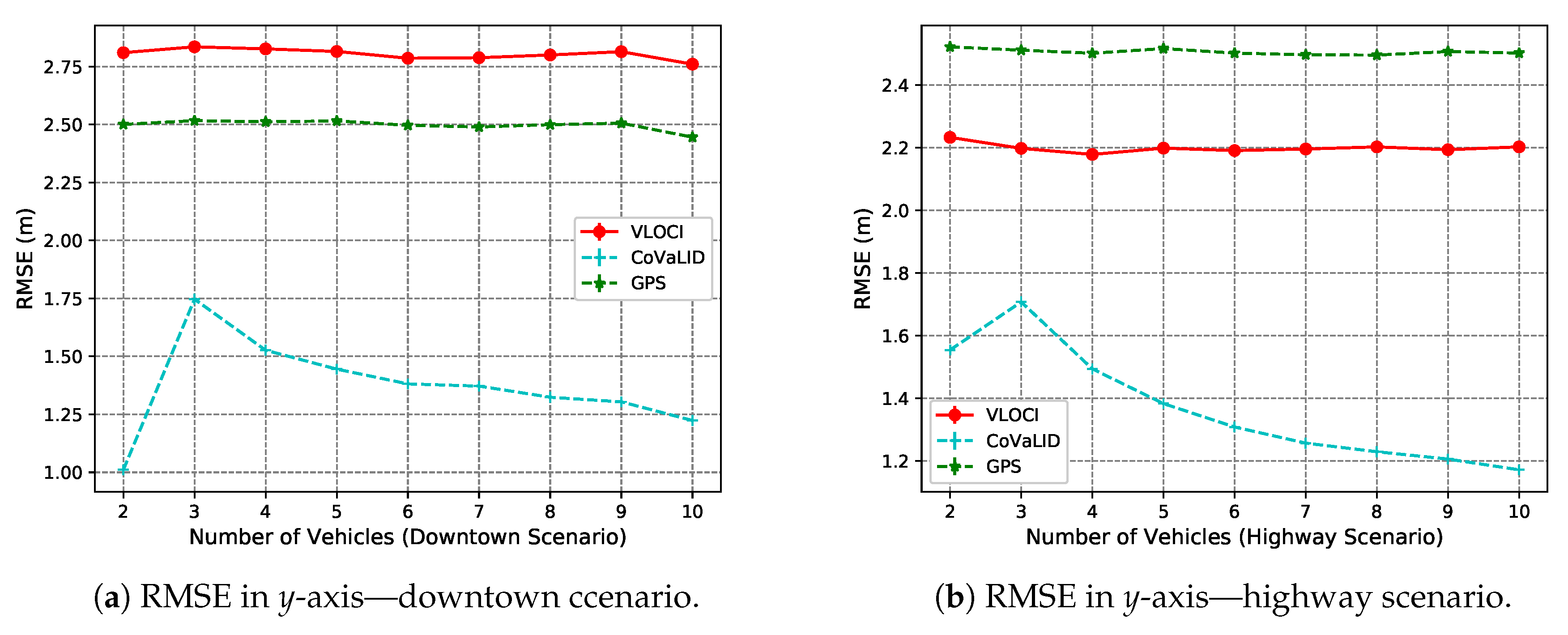
In the
y-axis, according to RMSE values described in
Figure 11a–c, our proposed method had better performance when compared to both VLOCI and GPS in downtown, highway, and until 9 vehicles in neighborhood scenario. However, when the number of vehicles increased to 10, it can be noticed that CoVaLID had its performance significantly affected. It is explained because, in scenarios with turns, it is more challenging to apply the similarity of triangles concept, since the communication can be affected by obstacles, such as buildings, and houses. Another interesting point is that contrarily to the
x-axis, we can notice is that the higher the velocity, the less affected is our proposed approach in the
y-axis. Also, in both downtown and neighborhood scenarios, we can notice that VLOCI had the worst performance, it can be explained because VLOCI was developed and tested in straight-line scenarios that is one of the characteristics of highway scenario, where VLOCI can overcome GPS accuracy.
We can notice that when the number of vehicles increases to 3, according to RMSE values, the CoVaLID algorithm had a slight decreased in its accuracy, which can be explained due to the use of random distance among vehicles, as well some obstacles and turns during the trajectory. These factors can affect our proposed solution since it assumes that the distance information is perfect. In other words, it does not take into account noise in distance information, which is not true in real-world scenarios. Furthermore, the accuracy of the distance information depends on which sensor is used.
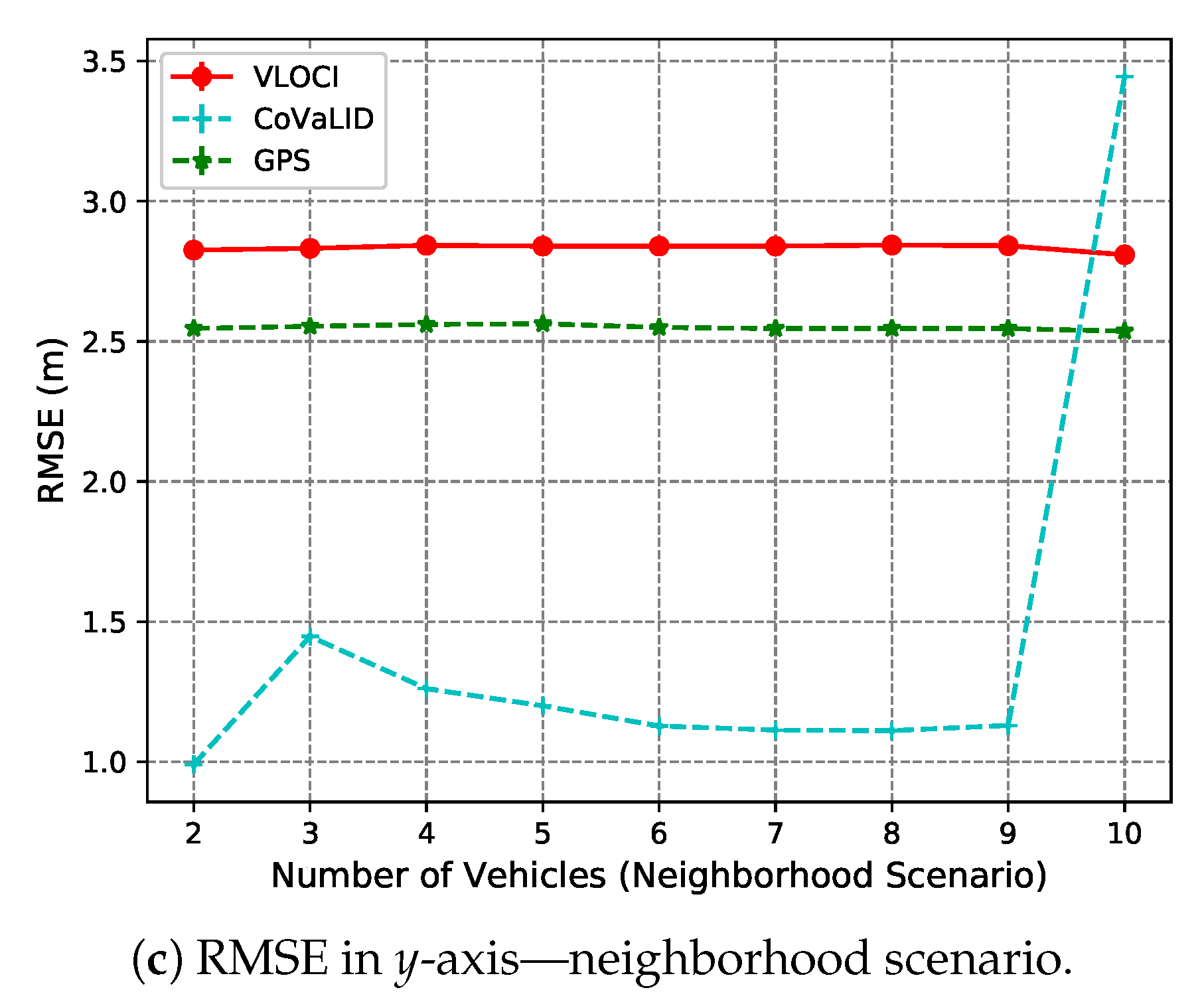
Another interesting point is that when increasing the number of vehicles, the CoVaLID performance improves due to the use of the weighted average method of nearby vehicles’ positions. Also, the results suggest that CoVaLID can be used as a solution for localization problem aided by GPS in all tested scenarios, except when the number of vehicles is increased to 10 in neighborhood scenario. In this particular case, the RMSE values, as seen in
Figure 10c,
Figure 11c and
Figure 12c, show that CoVaLID had the worst performance due to the 10th vehicle being farther to the target and as a consequence, its distance information become noisy, since in neighborhood scenarios there are only one-lane streets and sometimes the 10th vehicle is not even in the same street as the target vehicle. However, on average of both axes, as seen in
Figure 12a–c, results suggest that our proposed solution is suitable for all tested scenarios. However, in the neighborhood scenario, CoVaLID presented limitations on its performance, when used with 10 vehicles.
4.4.2. The Impact of the Vehicle Trajectory
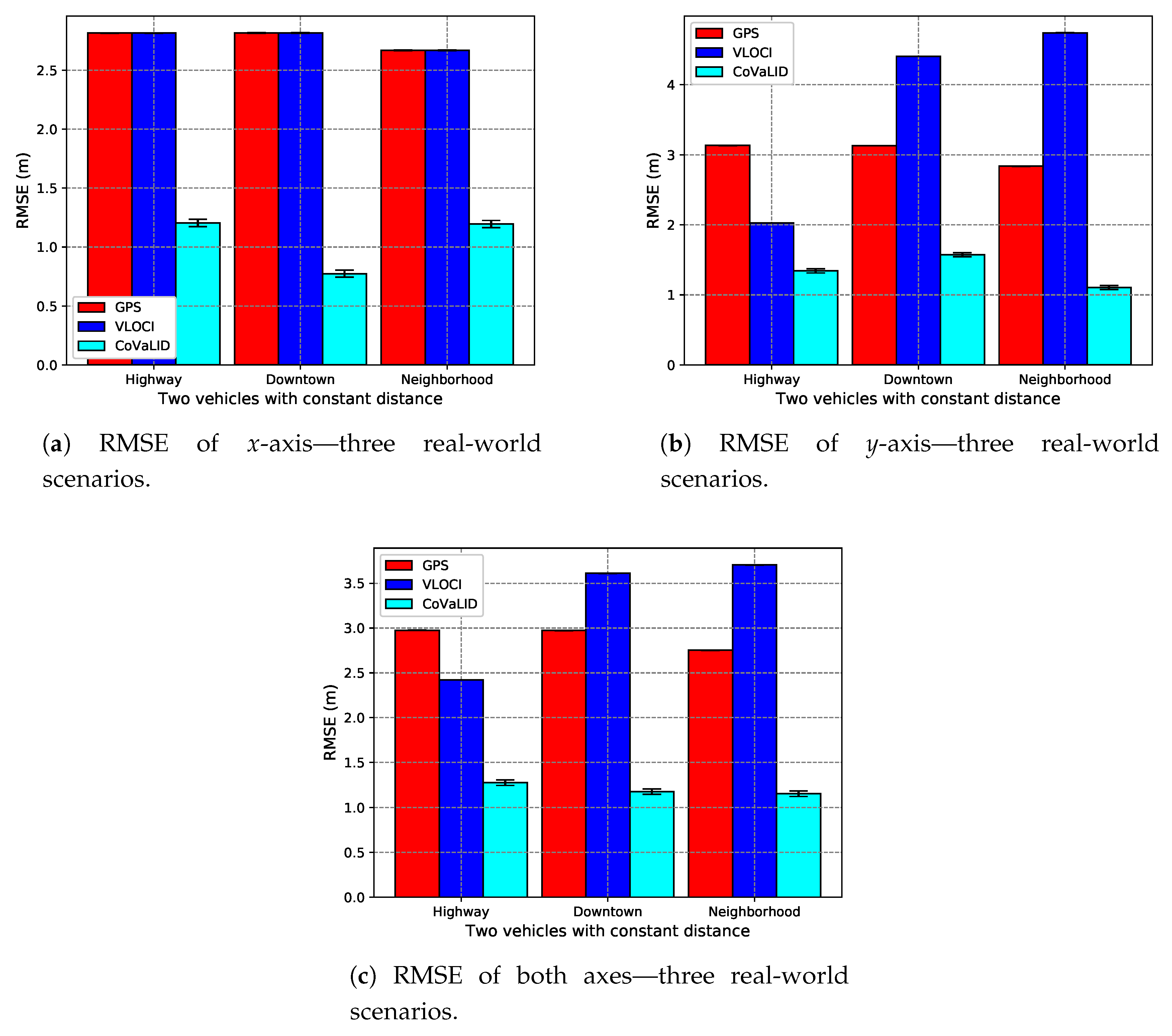
In this section, we divided the target vehicle trajectory into two parts: when vehicles are in a straight line or when they are in a turning scenario. In addition, we kept the GPS error constant at 2 m. We also used two vehicles, and the distance between them was set at 5 m apart. Thus, we can evaluate the impact of the vehicle trajectory regarding the accuracy of tested approaches in real-world scenarios.
Furthermore, each one of the three real-world scenarios was divided into a straight-line and turning scenarios, as described in
Appendix A.
When compared straight-line against turning trajectory in the downtown scenario, in the
x-axis, as depicted in
Figure 13a and
Figure 14a, we can notice that CoVaLID had better accuracy in the straight-line trajectory. The same occurred in the highway scenario, but with a just slightly better result when compared to the turning trajectory. On the other hand, in the neighborhood scenario, the turning trajectory had almost the same performance as in a straight-line scenario.
In the
y-axis, we can notice that the behavior of CoVaLID in a straight-line trajectory was the opposite presented in the
x-axis. As shown in
Figure 13b, the RMSE values show that in the downtown scenario, the CoVaLID performance decreased, whereas, in both highway and neighborhood scenarios, the accuracy was improved. Regarding the VLOCI algorithm, only in highway scenarios, it can overcome the GPS accuracy. Surprisingly, in
y-axis simulations and using trajectory with turns, the accuracy of CoVaLID was improved, as shown in
Figure 14b. It can be explained because usually, the vehicle position given by GPS does not lie in the same line as the distance information provided by sensors which implies in an automatic triangle rotation when triangle similarity concepts are performed.
Overall, we can notice that all tested approaches presented similar behaviors for both trajectories simulated. As we can see in
Figure 13c and
Figure 14c, on average in both axes, CoVaLID had the best performance when compared to VLOCI, and GPS. On the other hand, VLOCI was able to overcome GPS only in highways scenarios. However, it is worth mentioning that the CoVaLID approach is dependable on the high quality of sensors information about distance among vehicles.
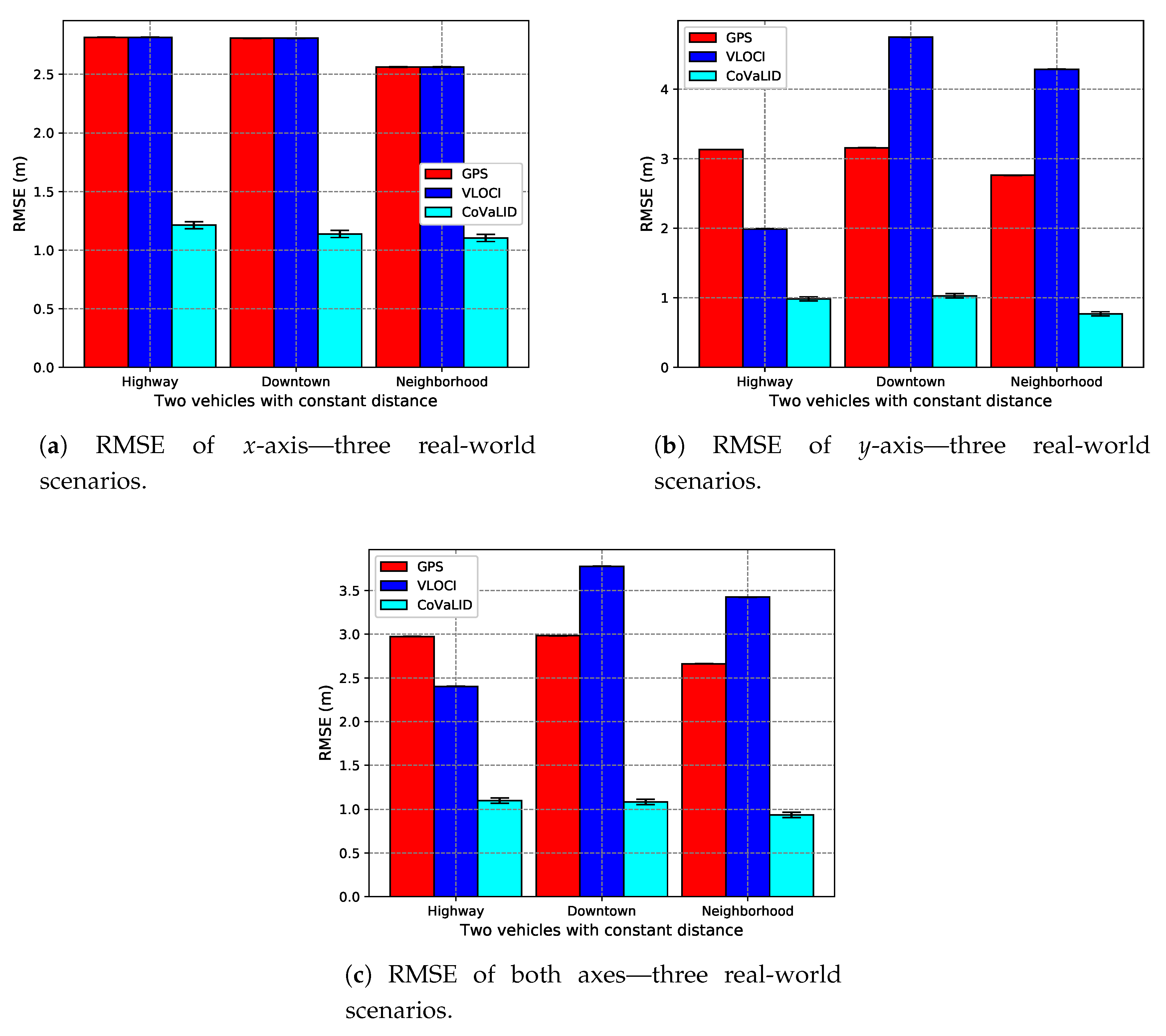
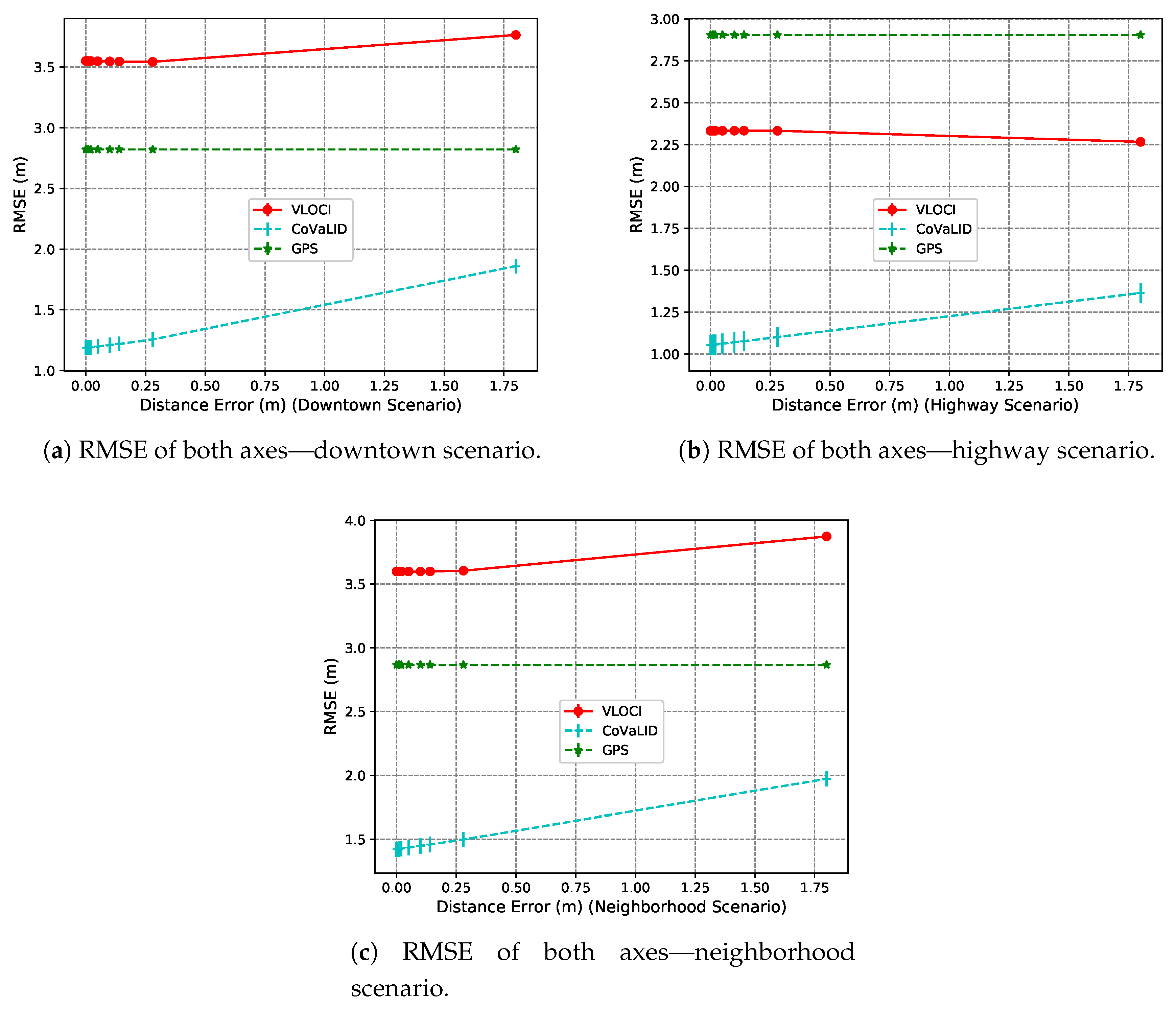
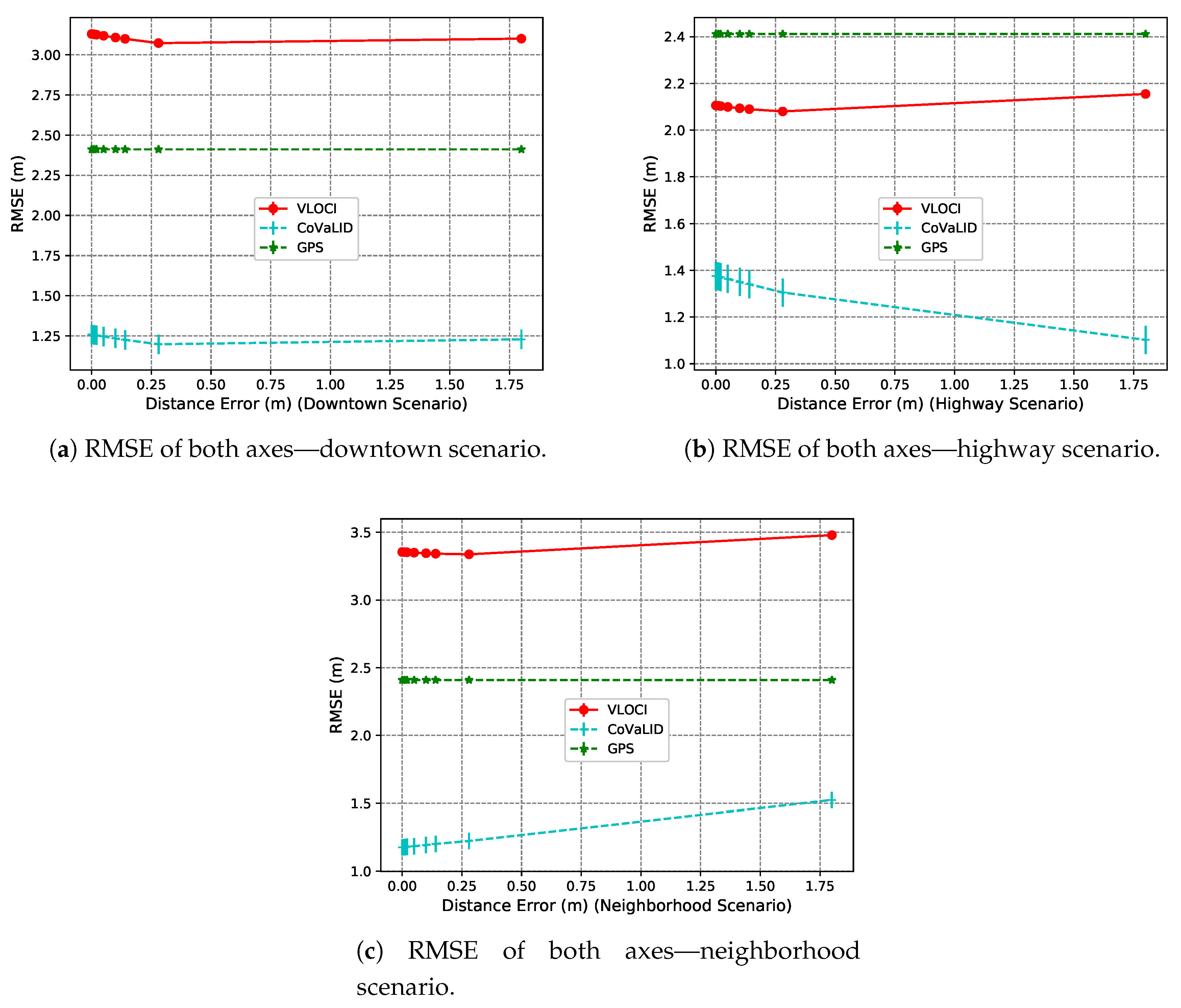
4.4.3. The Impact of Distance Information Error
This section aims at analyzing and assessing the sensors that are suitable to provide the distance information in all tested scenarios. We used the sensor’s specifications provided in the literature [
35]. The used parameters and their respective sensors are described in
Table 7.
Moreover, all simulations in this section were conducted using 10 vehicles with both distance and velocity set randomly, 2 m of GPS error, and the scenarios were divided into random, straight-line, and trajectories with turns.
In a random trajectory scenario, the results presented in the x-axis show that CoVaLID had similar behavior for all three tested scenarios. We can observe that the higher is the distance information error, the worse is the CoVaLID performance. The same behavior can be seen in the y-axis, and as a consequence, on average of both axes. However, the CoVaLID accuracy just decreased its performance around 32 cm in the downtown scenario.
Also, y-axis overall, we noticed that in both downtown and neighborhood scenarios, the VLOCI behavior was affected similarly as CoVaLID, whereas in highway scenario the VLOCI kept its accuracy almost constant due to the distance measurement model used in VLOCI algorithm along with vehicles’ skewed position treatment. Another interesting point is that in downtown scenario was also the worst CoVaLID performance as expected since the buildings and other obstacles can affect the sensors’ measurements.
The RMSE values on average of both axes, seen in
Figure 15a–c can summarize the behavior of the tested approaches. Overall, we can notice that the best accuracy was reached in the highway scenario that is due to its characteristics: a scenario with no buildings or obstacles, and mostly a straight-line scenario. Moreover, results suggest that the EKF works well using the velocities of the vehicles in this scenario.
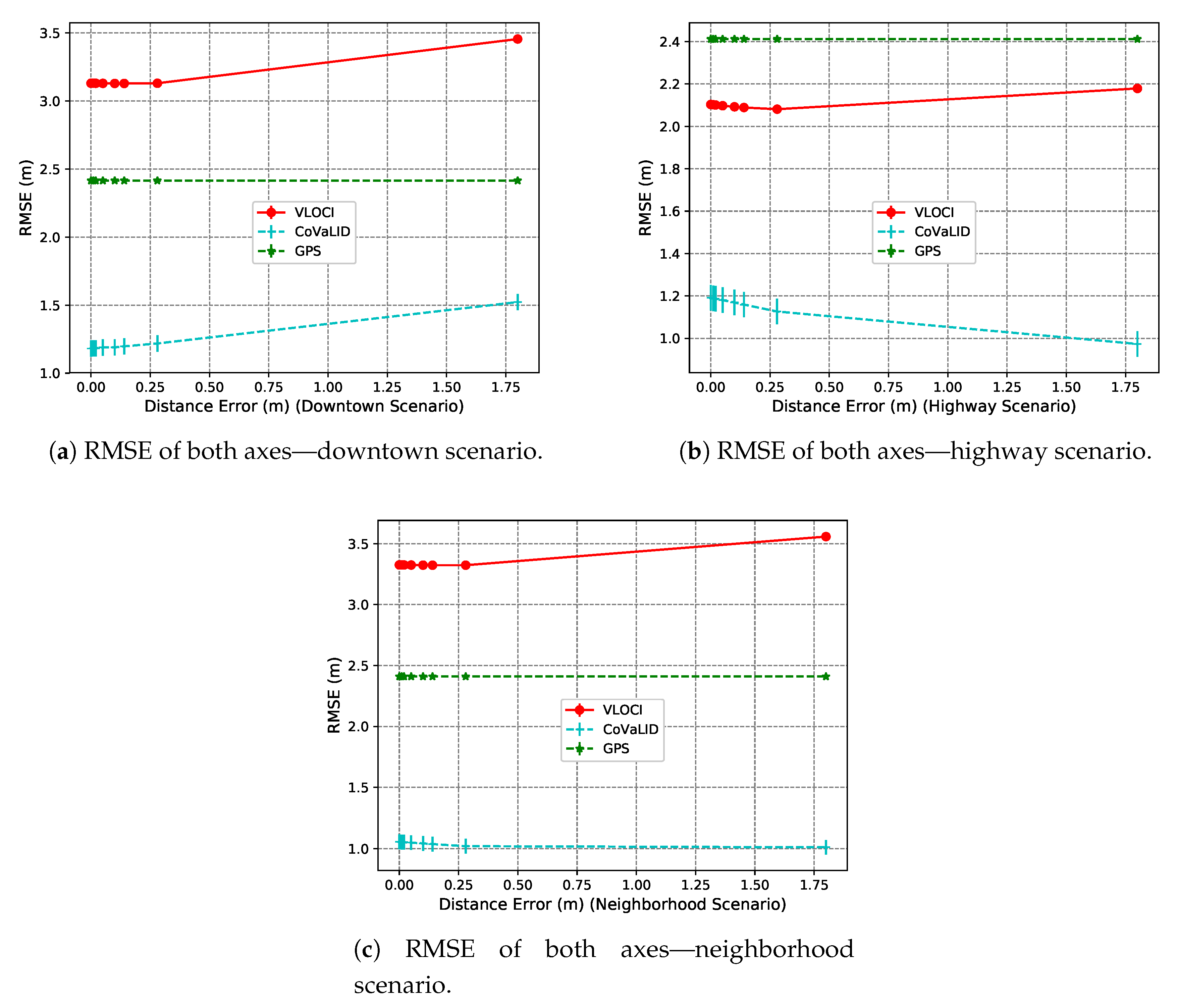
Using the straight-line trajectory, we can notice that, according to
Figure 16a–c, in both downtown and highway scenarios, the CoVaLID improved its performance due to two reasons. First, because of the trajectory characteristics (a straight-line). Second, because the EKF deals well with noises in distance information in these scenarios along with higher velocities, as seen in the highway case. However, as expected, in the neighborhood scenario, the CoVaLID had the worst performance due to the lower vehicles’ velocity.
From trajectories with turns, we can observe, according to
Figure 17a–c, that CoVaLID presented the same behavior as in the highway scenario, improving its performance. Whereas, in the downtown scenario, its accuracy was affected by the scenarios’ characteristics such as obstacles, lower vehicles’ velocity, and sensors’ field of view. On the other hand, in the neighborhood scenario, the CoVaLID kept RMSE values almost constant. It can be explained due to the combination of lower vehicles’ velocities and scenario characteristics.
Hence, we detailed the impact of the sensors used to provide distance information, and the results presented in this section suggest that either the trajectories and the noisy distance information can affect our proposed solution in some way.
4.4.4. Sensors Analysis
In this work, we tested and analyzed three different sensors that are capable of providing distance information that is used in our proposed approach to improve the vehicles’ position estimation. As seen in
Table 7, we used radars, lasers, and cameras as sensors.
Radar sensors are capable of measuring both the relative distance and speed of a target in short, medium, and long-range, with ranges up to 20 m, 100 m, and 250 m, respectively. In VANets, the radars commonly used to address localization problems are long-range sensors. In this section, we tested four different radars, all of them of long-range. Since most radar sensors have no moving parts, the across-track accuracy is affected. It can be verified through results shown in the previous section, wherein all tested scenarios, the accuracy was more affected in the y-axis than in the x-axis. However, these sensors work well even in challenging environmental conditions, such as rain, dust, and fog.
On the other hand, Laser sensors can measure the distance of an object. However, they are not able to measure the relative speed of a target with a single scan. For that purpose, lasers need successive scans. These kinds of sensors can be slightly more accurate than radars, although its accuracy is significantly affected by environmental conditions, and their prices are still higher when compared to radars. In this work, we tested two different laser sensors, and results show that the impact of the use of lasers is not significant in terms of accuracy. However, all applied approaches were not tested in adverse environmental conditions, and it is known [
35] that it can affect the accuracy of distance information given by lasers.
The cameras can also be used as devices that provide reliable distance information since its accuracy is around 0.01 m, and also they have higher update rates when compared to the other sensors. Although, it is a range-limited sensor that operates in a range of up to 10 m, as described in
Table 7. Furthermore, its accuracy can be affected when it is exposure to lights, mainly sunlight, and even at night when the other vehicles’ lights can interfere in the camera’s performance. In our simulation results, we can notice that cameras can have good accuracy since the distances among the target and the neighbors are up to 10 m. Also, the drawback situation with lights was not tested.
Overall, of all three sensors, the higher cost is the Laser, whereas the cheapest are the cameras, and both require a massive amount of data since they use 3D environmental representation. Hence, they are considered a high computational cost solution. On the other hand, radars cannot reach the resolution for object identification, but they can detect it.
Finally, analyzing the advantages and disadvantages of each sensor cited above, it is clear that it would be possible to combine the outputs of all three sensors in a data fusion approach to achieve a high level of accuracy since their efficiency depends on their field of view.

 ,
, 
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}