Probability-Based Indoor Positioning Algorithm Using iBeacons

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
2.1. Signal Characteristics and Radio Signal Attenuation Model
2.2. Nearest Neighbor
2.3. Weighted Centroid
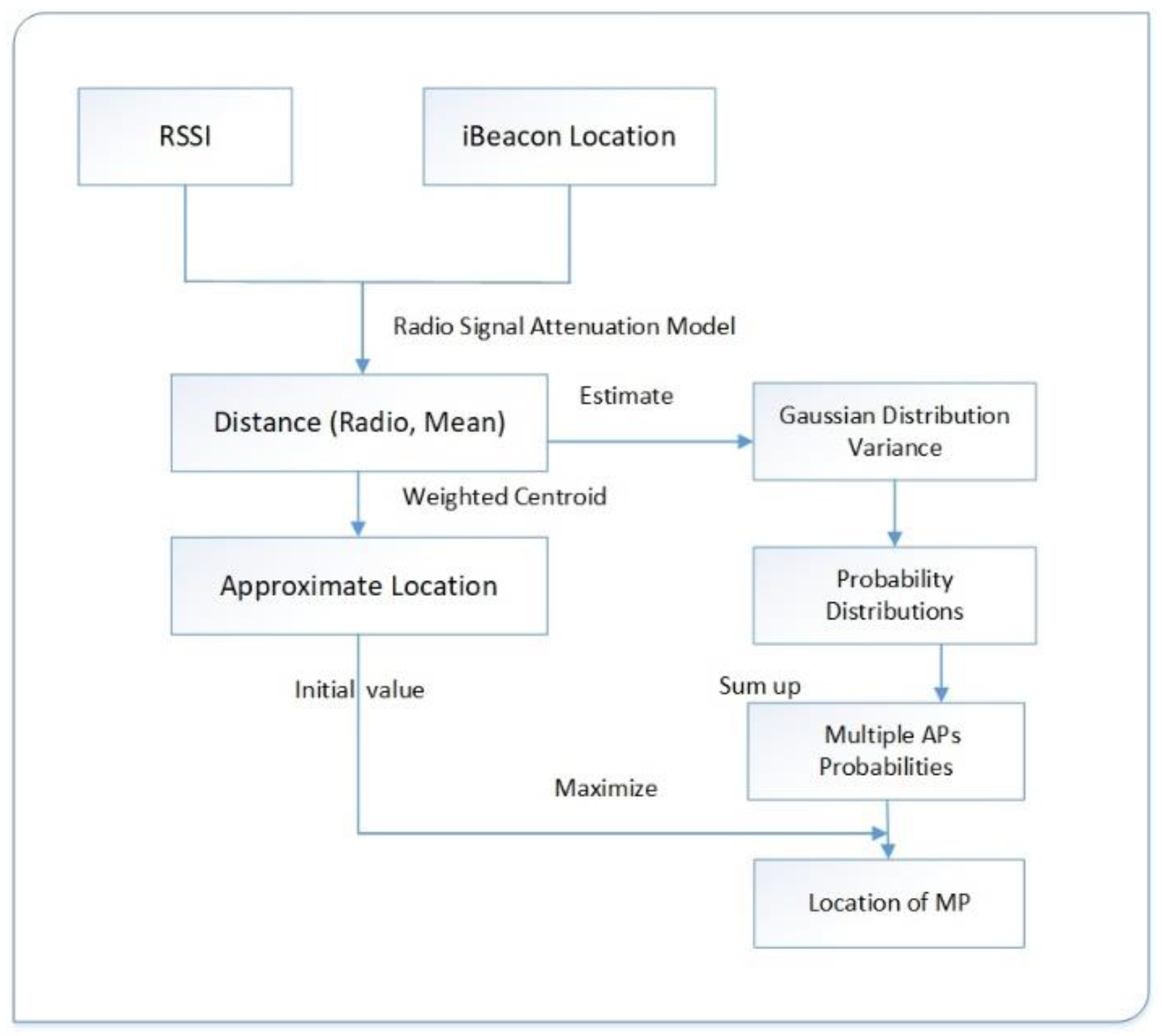
2.4. Advanced Weighted Centroid
3. Experiment
3.1. Device and Software
3.2. Experimental Sites
3.3. Data Processing
4. Results and Discussion
4.1. Positioning Trajectory Analysis
4.2. Positioning Accuracy Analysis
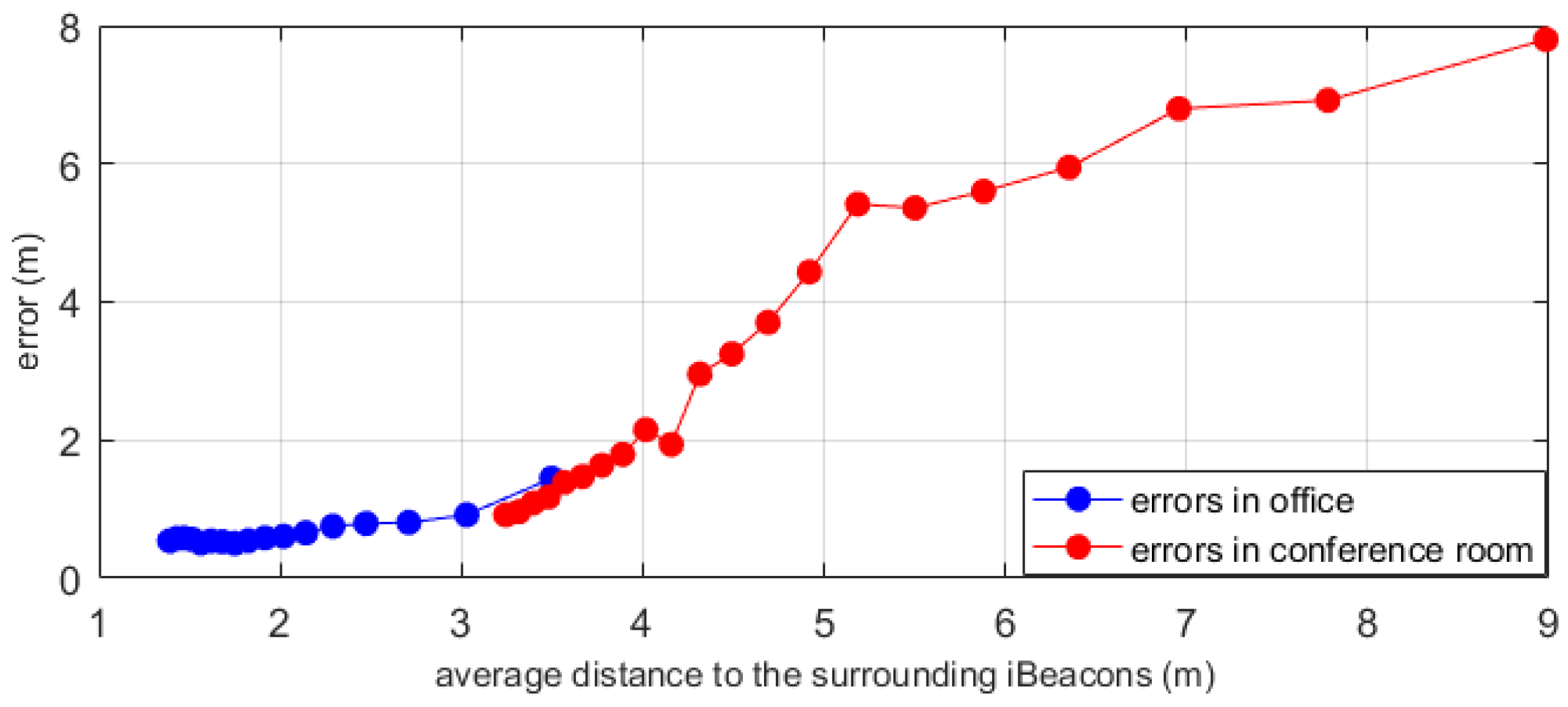
4.3. Effect of the Number of iBeacons on Accuracy
4.4. Effect of Different Emission Frequencies on Accuracy
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Klepeis, N.E.; Nelson, W.C.; Ott, W.R.; Robinson, J.P.; Tsang, A.M.; Switzer, P.; Behar, J.V.; Hern, S.C.; Engelmann, W.H. The National Human Activity Pattern Survey (NHAPS): A resource for assessing exposure to environmental pollutants. Expo. Sci. Environ. Epidemiol. 2000, 11, 231–252. [Google Scholar] [CrossRef] [PubMed]
- Prigge, E.A.; How, J.P. Signal Architecture for a Distributed Magnetic Local Positioning System. IEEE Sens. J. 2004, 4, 864–873. [Google Scholar] [CrossRef]
- Xia, H.; Zuo, J.; Liu, S.; Qiao, Y. Indoor localization on smartphones using built-in sensors and map constraints. IEEE Trans. Instrum. Meas. 2019, 68, 1189–1198. [Google Scholar] [CrossRef]
- Deretey, E.; Ahmed, M.T.; Marshall, J.A.; Greenspan, M. Visual indoor positioning with a single camera using PnP. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Banff, AB, Canada, 13–16 October 2015. [Google Scholar]
- Reza, A.W.; Geok, T.K. Investigation of indoor location sensing via RFID reader network utilizing grid covering algorithm. Wirel. Pers. Commun. 2009, 49, 67–80. [Google Scholar] [CrossRef]
- Schweinzer, H.; Kaniak, G. Ultrasonic device localization and its potential for wireless sensor network security. Control Eng. Pract. 2010, 18, 852–862. [Google Scholar] [CrossRef]
- Zhou, Y.; Law, C.L.; Guan, Y.L.; Chin, F. Indoor elliptical localization based on asynchronous UWB range measurement. IEEE Trans. Instrum. Meas. 2011, 60, 248–257. [Google Scholar] [CrossRef]
- Pivato, P.; Palopoli, L.; Petri, D. Accuracy of RSS-Based centroid localization algorithms in an indoor environment. IEEE Trans. Instrum. Meas. 2011, 60, 3451–3460. [Google Scholar] [CrossRef]
- Tao, P.; Xinhong, W.; Chao, W.; Danqing, S. Hybrid wireless indoor positioning with ibeacon and WI-FI. In Proceedings of the 11th International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–23 September 2015. [Google Scholar]
- Zhao, X.; Xiao, Z.; Markham, A.; Trigoni, N.; Ren, Y. Does btle measure up against wifi? A comparison of indoor location performance. In Proceedings of the European Wireless 2014; 20th European Wireless Conference, Barcelona, Spain, 14–16 May 2014. [Google Scholar]
- Yang, L.; Li, B.; Li, H.; Shen, Y. iBeacon/WiFi Signal Characteristics Analysis for Indoor Positioning Using Mobile Phone. In China Satellite Navigation Conference (CSNC) 2017 Proceedings: Volume I; Springer: Singapore, 2017; pp. 405–416. [Google Scholar]
- Newman, N. Apple iBeacon technology briefing. J. Direct Data Digit. Mark. Pract. 2014, 15, 222–225. [Google Scholar] [CrossRef]
- Huang, K.; He, K.; Du, X. A hybrid method to improve the BLE-based indoor positioning in a dense bluetooth environment. Sensors 2019, 19, 424. [Google Scholar] [CrossRef] [PubMed]
- BLE. Available online: https://en.wikipedia.org/wiki/Bluetooth_Low_Energy (accessed on 8 April 2019).
- Dickinson, P.; Cielniak, G.; Szymanezyk, O.; Mannion, M. Indoor positioning of shoppers using a network of Bluetooth Low Energy beacons. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Madrid · Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Lin, X.Y.; Ho, T.W.; Fang, C.C.; Yen, Z.S.; Yang, B.J.; Lai, F. A mobile indoor positioning system based on iBeacon technology. In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015. [Google Scholar]
- Teuber, A.; Eissfeller, B.; Pany, T. A two-stage fuzzy logic approach for wireless LAN indoor positioning. In Proceedings of the 2006 IEEE/ION Position, Location, and Navigation Symposium, Coronado, CA, USA, 25–27 April 2006. [Google Scholar]
- Kim, N.; Kim, Y. A novel RSS-Ratio position estimation scheme for Wi-Fi networks. In Proceedings of the 2015 International Conference on Electrical, Electronics and Mechatronics; AlWaely, W.M.L., Subban, R., Mehta, P.D., Eds.; Atlantis Press: Paris, France, 2016; Volume 34, pp. 61–64. [Google Scholar]
- Teuber, A.; Eissfeller, B. WLAN indoor positioning based on Euclidean distances and fuzzy logic. In Proceedings of the 3rd Workshop on Positioning, Navigation and Communication, Hanover, Germany, 1 January 2006; pp. 159–168. [Google Scholar]
- Canton Paterna, V.; Calveras Auge, A.; Paradells Aspas, J.; Perez Bullones, M.A. A bluetooth low energy indoor positioning system with channel diversity, weighted trilateration and kalman filtering. Sensors 2017, 17, 2927. [Google Scholar] [CrossRef] [PubMed]
- Altintas, B.; Serif, T. Indoor location detection with a RSS-based short term memory technique (KNN-STM). In Proceedings of the 2012 IEEE International Conference on Pervasive Computing and Communications Workshops, Lugano, Switzerland, 19–23 March 2012; pp. 794–798. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000. Conference on Computer Communications. Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Zuo, J.; Liu, S.; Xia, H.; Qiao, Y. Multi-phase fingerprint map based on interpolation for indoor localization using iBeacons. IEEE Sens. J. 2018, 18, 3351–3359. [Google Scholar] [CrossRef]
- Hansson, A.; Tufvesson, L. Using Sensor Equipped Smartphones to Localize WiFi Access Points. Ph.D. Thesis, Department of Automatic Control, Lund University, Lund, Sweden, 2011. [Google Scholar]
- Yoshida, S. Propagation Measurements and Models for Wireless Communications Channels. IEEE Commun. Mag. 1995, 33, 42–49. [Google Scholar]
- Rappaport, T.S. Wireless Communications—Principles and Practice. Microw. J. 2002, 45, 128–129. [Google Scholar]
- Whitman, G.M.; Kim, K.S.; Niver, E. A theoretical model for radio signal attenuation inside buildings. IEEE Trans. Veh. Technol. 1995, 44, 621–629. [Google Scholar] [CrossRef]
- Chen, J.; Ou, G.; Peng, A.; Zheng, L.X.; Shi, J.H. A hybrid dead reckon system based on 3-dimensional dynamic time warping. Electronics 2019, 8, 185. [Google Scholar] [CrossRef]
- Konrad, T.; Wölfel, P. Wifi Compass: Wifi Access Point Localization with Android Devices. Master’s Thesis, ST.Pölten University, Information of security, Lower Austria, Austria, 2012. [Google Scholar]
- Dennis, J.; John, E.; Moré, J.J. Quasi-Newton methods, motivation and theory. SIAM Rev. 1977, 19, 46–89. [Google Scholar] [CrossRef]
- nRF51822. Available online: https://www.nordicsemi.com/Products/Low-power-short-range-wireless/nRF51822 (accessed on 30 September 2019).

















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, T.; Xia, H.; Liu, S.; Qiao, Y. Probability-Based Indoor Positioning Algorithm Using iBeacons. Sensors 2019, 19, 5226. https://doi.org/10.3390/s19235226
Wu T, Xia H, Liu S, Qiao Y. Probability-Based Indoor Positioning Algorithm Using iBeacons. Sensors. 2019; 19(23):5226. https://doi.org/10.3390/s19235226
Chicago/Turabian StyleWu, Tianli, Hao Xia, Shuo Liu, and Yanyou Qiao. 2019. "Probability-Based Indoor Positioning Algorithm Using iBeacons" Sensors 19, no. 23: 5226. https://doi.org/10.3390/s19235226
APA StyleWu, T., Xia, H., Liu, S., & Qiao, Y. (2019). Probability-Based Indoor Positioning Algorithm Using iBeacons. Sensors, 19(23), 5226. https://doi.org/10.3390/s19235226