The Impact of Different Kernel Functions on the Performance of Scintillation Detection Based on Support Vector Machines †



Abstract
1. Introduction
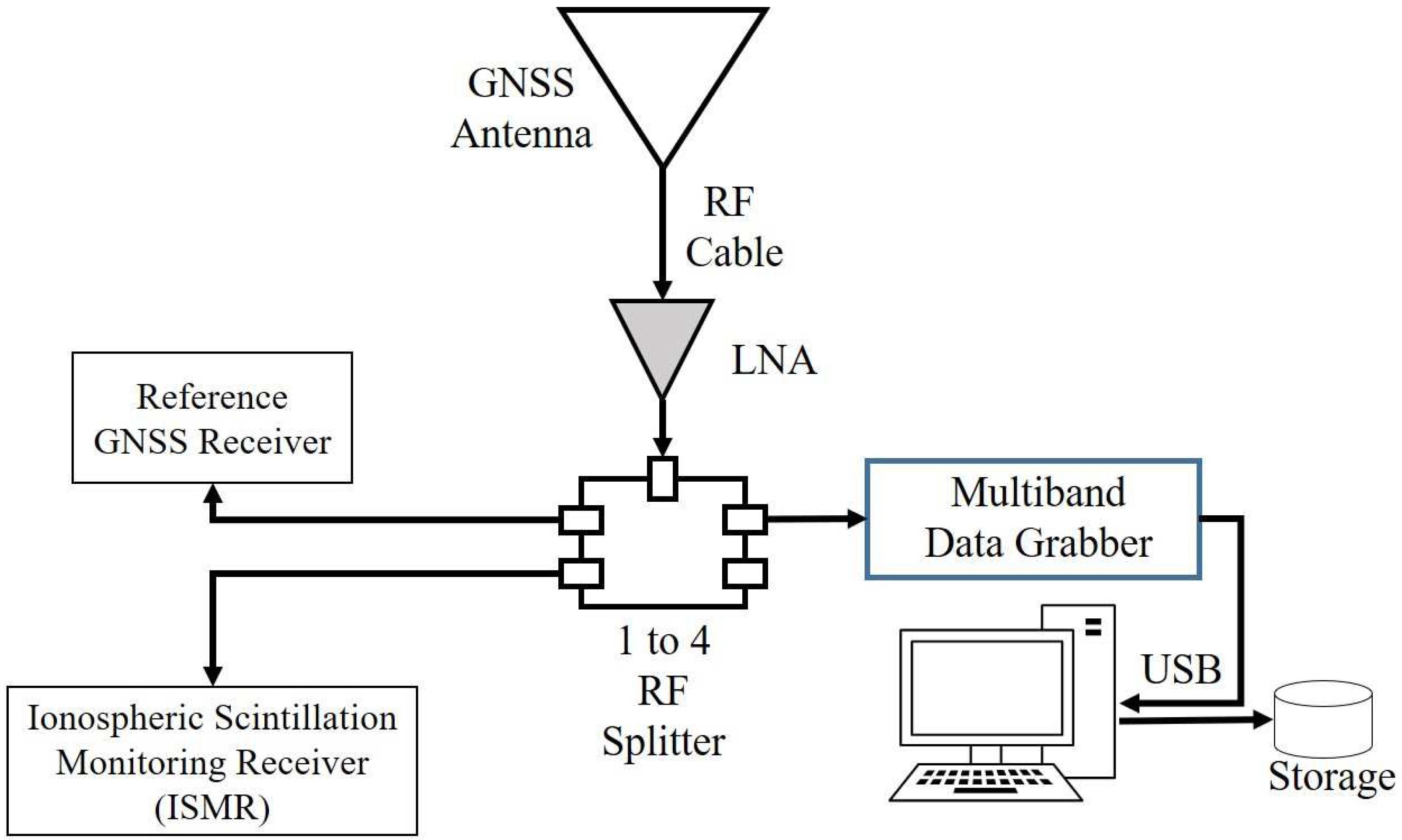
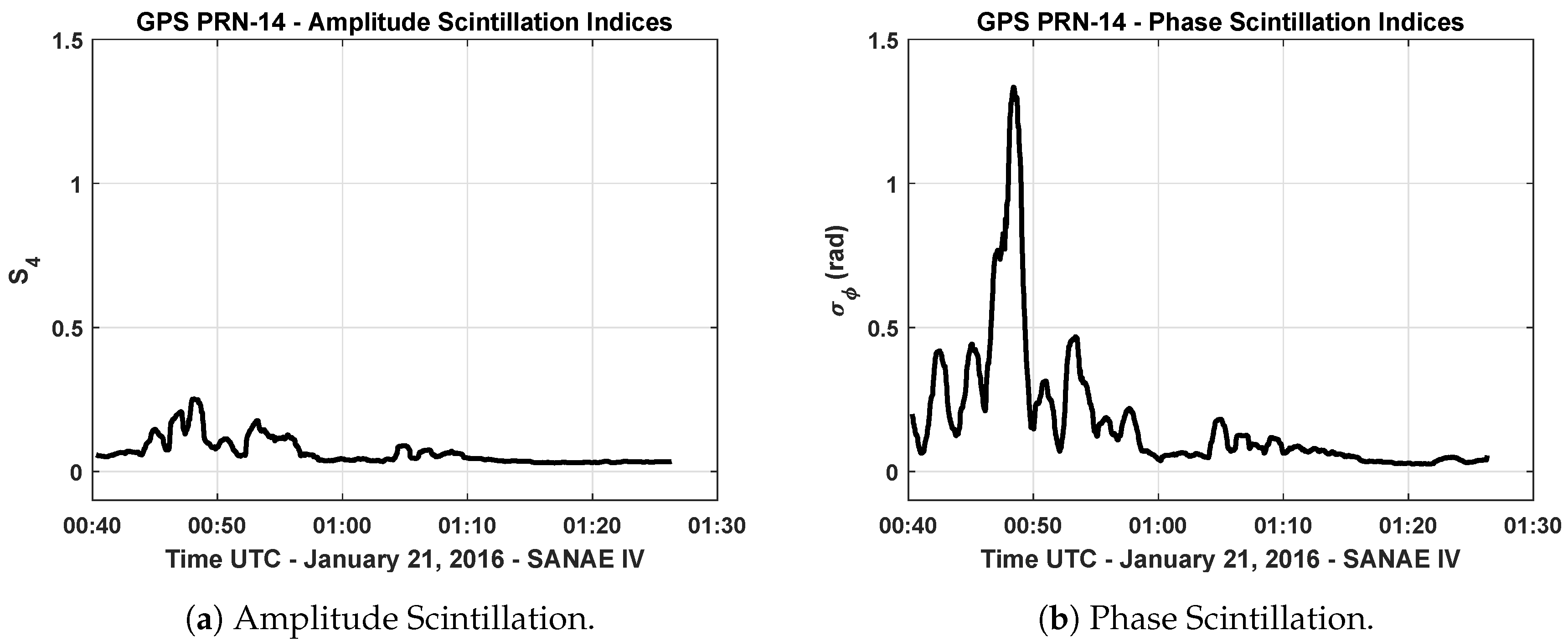
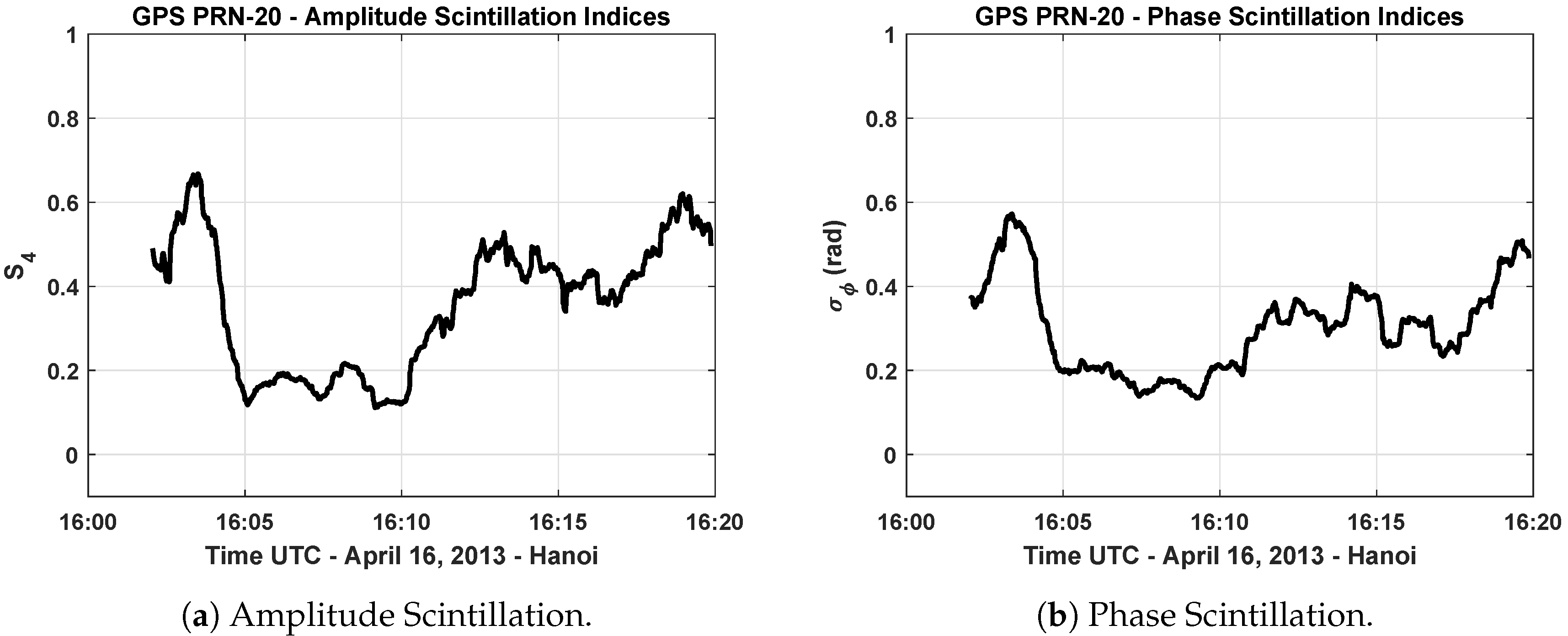
2. Ionospheric Scintillation Data and Analysis
3. Overview of Support Vector Machines Algorithm
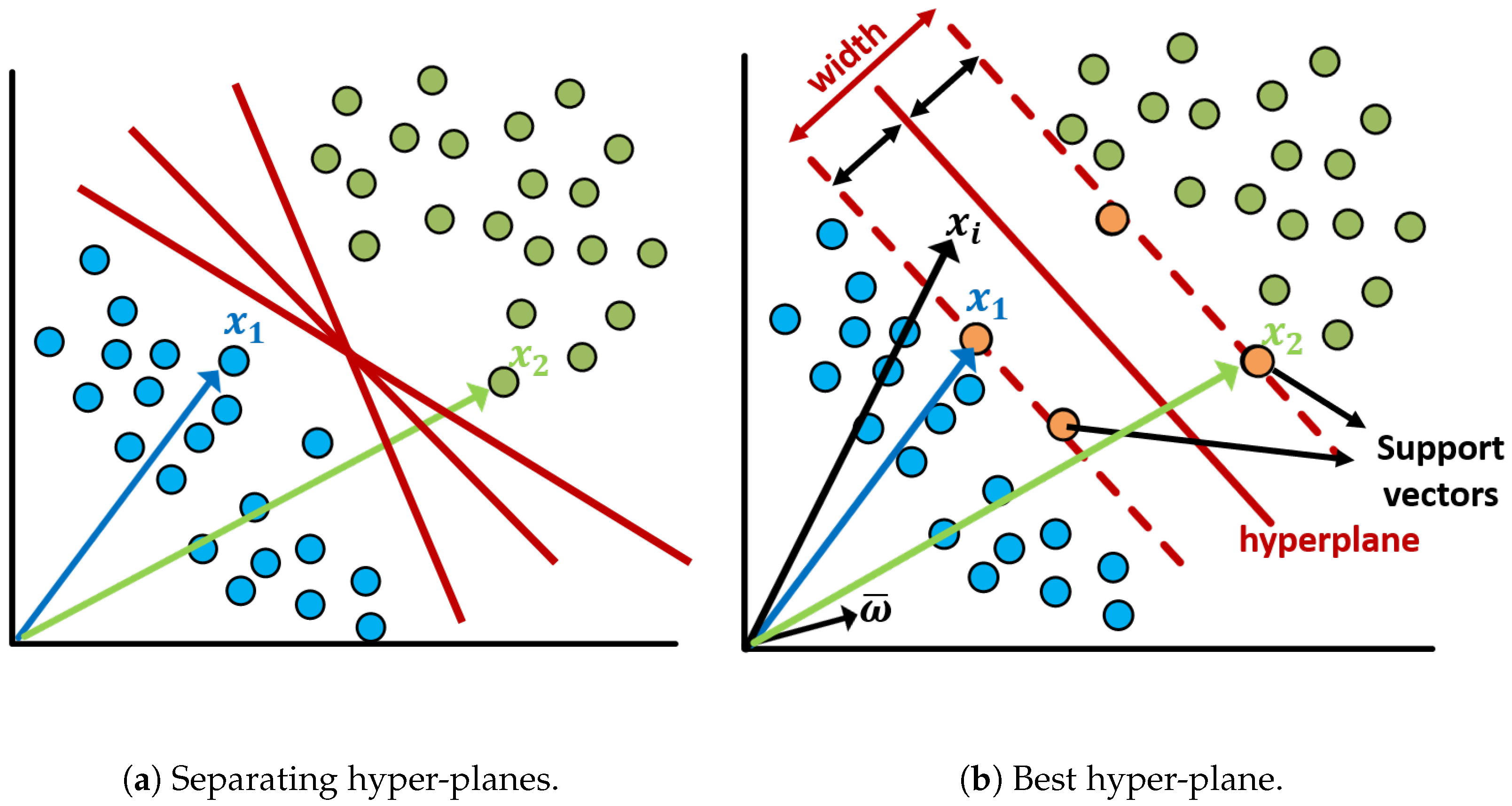
3.1. Derivation of the Optimum Hyper-Plane
3.2. Kernel Extension
4. Experimental Tests
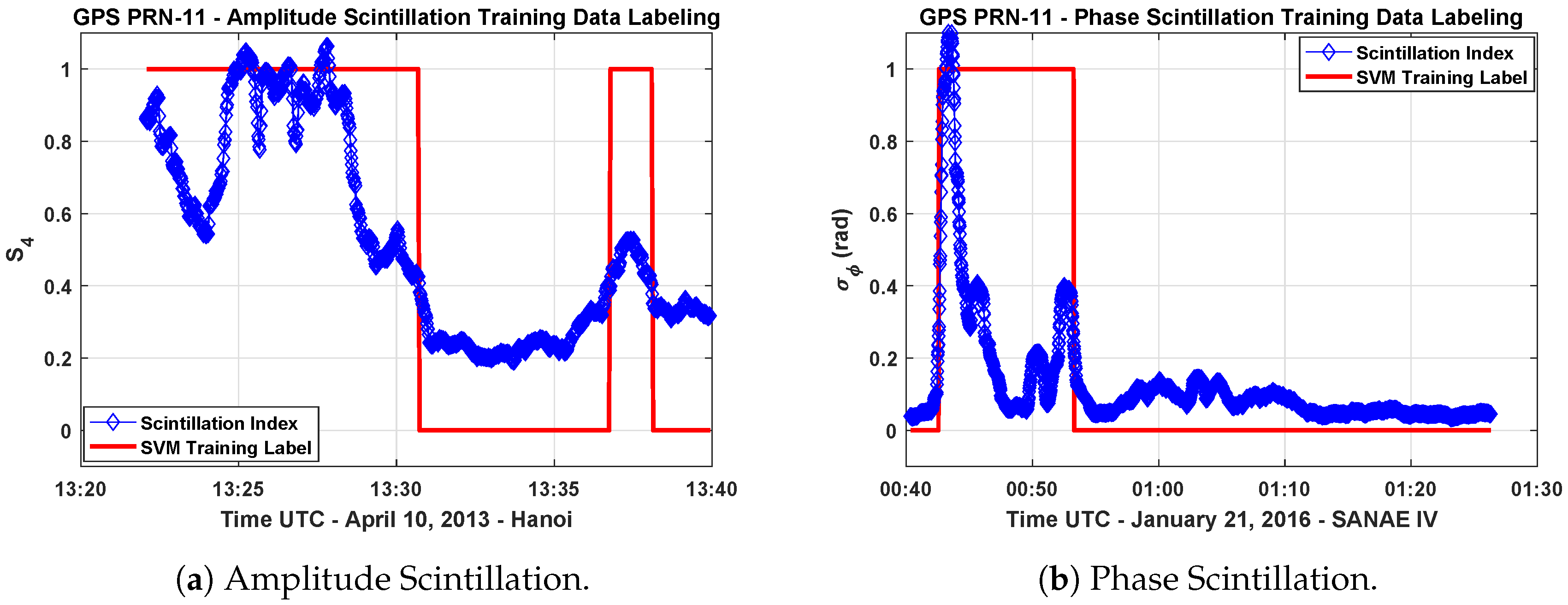
4.1. Training Data Preparation and Labeling
4.2. Cross Validation
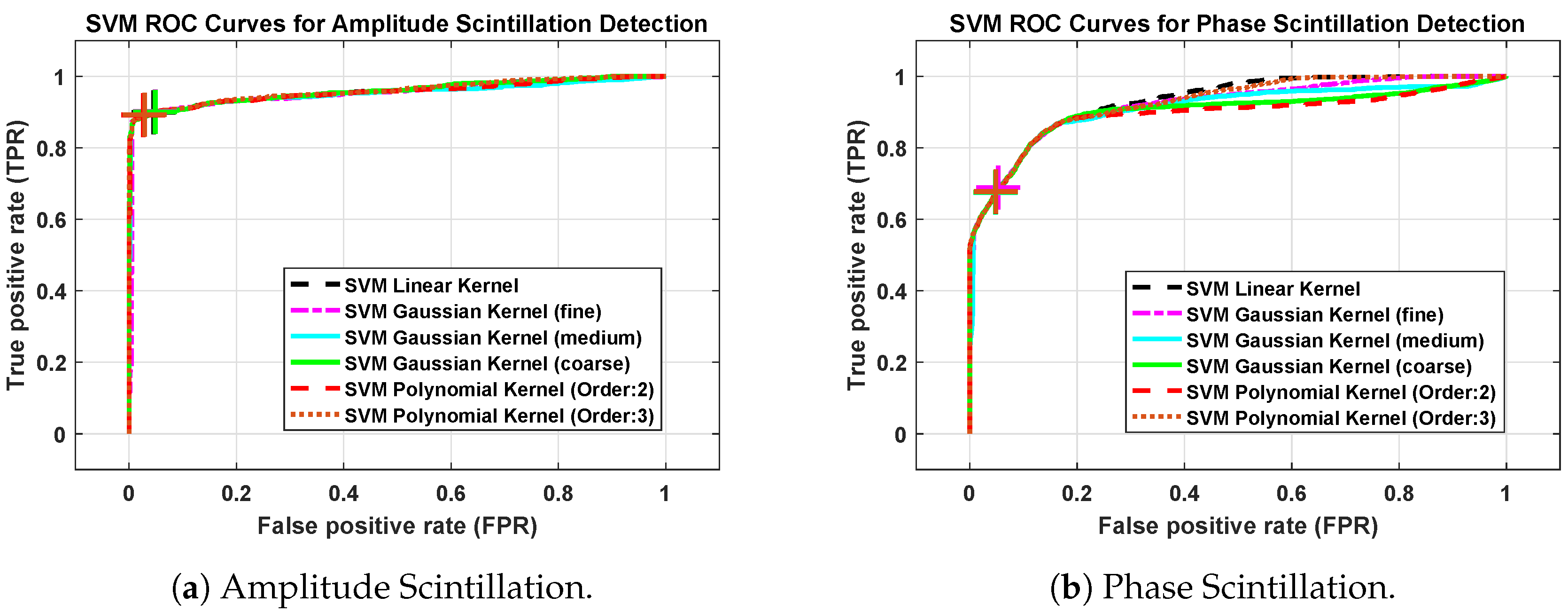
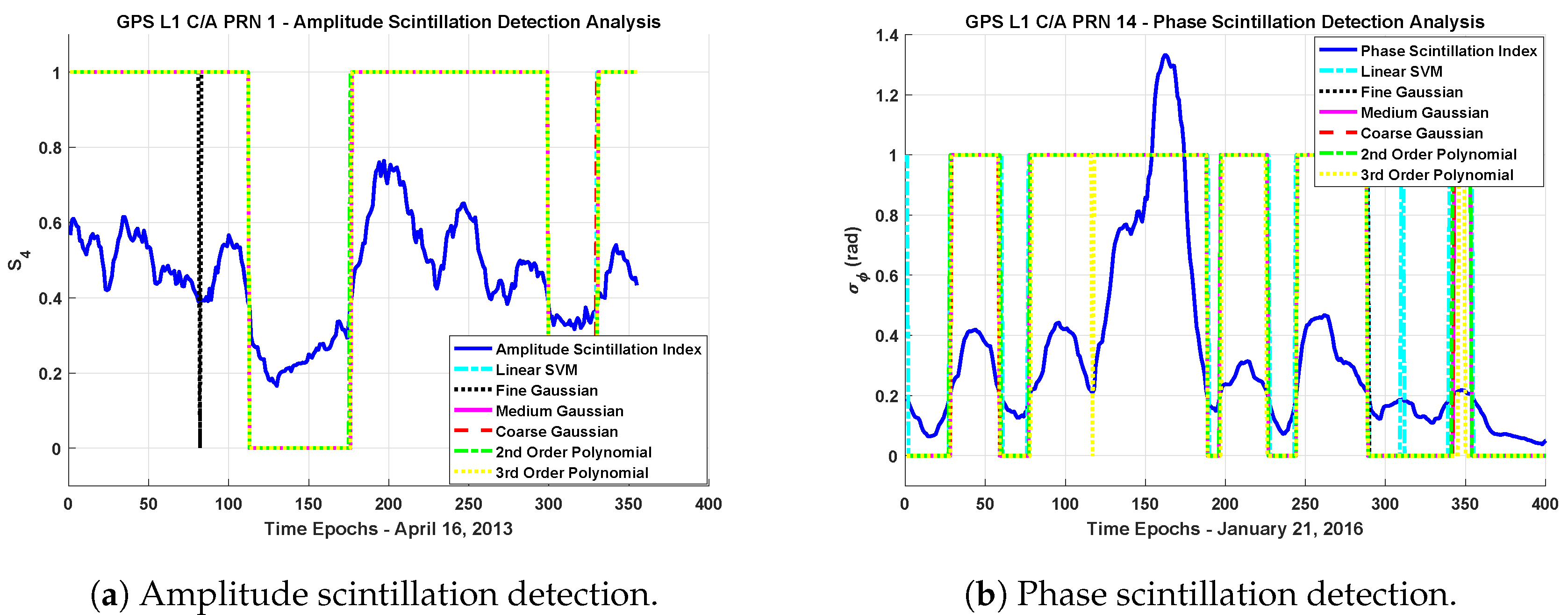
4.3. Tests and Evaluation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite Systems |
| SVM | Support Vector Machines |
| ROC | Receiver Operating Characteristics |
| RBF | Radial Basis Function |
| TP | True Positive |
| FP | False Positive |
| TN | True Negative |
| FN | False Negative |
| TPR | True Positive Rate |
| FPR | False Positive Rate |
| AUC | Area Under the Curve |
References
- Priyadarshi, S. A review of ionospheric scintillation models. Surv. Geophys. 2015, 36, 295–324. [Google Scholar] [CrossRef] [PubMed]
- Rino, C.L. The Theory of Scintillation with Applications in Remote Sensing; IEEE Press, Wiley, Inc. Publication: Hoboken, NJ, USA, 2011. [Google Scholar]
- Tatarskii, V.I. The Effects of the Turbulent Atmosphere on Wave Propagation; National Technical Information Service: Springfield, VA, USA, 1971. [Google Scholar]
- Yeh, K.C.; Liu, C.-H. Radio wave scintillation in the ionosphere. IEEE Proc. 1982, 70, 324–360. [Google Scholar]
- Crane, R.K. Ionospheric scintillation. IEEE Proc. 1977, 65, 180–199. [Google Scholar] [CrossRef]
- Cristodaro, C.; Dovis, F.; Linty, N.; Romero, R. Design of a configurable monitoring station for scintillations by means of a GNSS software radio receiver. IEEE Geosci. Remote. Sens. Lett. 2018, 15, 325–329. [Google Scholar] [CrossRef]
- Kintner, P.M.; Humphreys, T.E.; Hinks, J.C. GNSS and ionospheric scintillation – how to survive the next solar maximum. Inside GNSS 2009, 22–29. Available online: http://www.insidegnss.com (accessed on 15 September 2019).
- Savas, C.; Dovis, F.; Falco, G. Performance evaluation and comparison of GPS L5 acquisition methods under scintillations. In Proceedings of the 31st International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 3596–3610. [Google Scholar]
- Fugro Satellite Positioning—The Effect of Space Weather Phenomena on Precise GNSS Applications; White Paper; Fugro N.V.: Leidschendam, The Netherlands, 2014; Available online: https://fsp.support (accessed on 26 November 2019).
- Savas, C.; Falco, G.; Dovis, F. A comparative analysis of polar and equatorial scintillation effects on GPS L1 and L5 tracking loops. In Proceedings of the International Technical Meeting of the Institute of Navigation, Reston, VA, USA, 28–31 January 2019; pp. 632–646. [Google Scholar]
- Van Dierendonck, A.J.; Klobuchar, J.; Hua, Q. Ionospheric scintillation monitoring using commercial single frequency C/A code receivers. In Proceedings of the 6th International Technical Meeting of Satellite Division of the institute of Navigation (ION GPS 1993), Salt Lake City, UT, USA, 22–24 September 1993; pp. 1333–1342. [Google Scholar]
- Romero, R.; Linty, N.; Cristodaro, C.; Dovis, F.; Alfonsi, L. On the use and performance of new Galileo signals for ionospheric scintillation monitoring over Antarctica. In Proceedings of the International Technical Meeting of The Institute of Navigation, Monterey, CA, USA, 25–28 January 2016; pp. 989–997. [Google Scholar]
- Curran, J.T.; Bavaro, M.; Morrison, A.; Fortuny, J. Developing a multi-frequency for GNSS-based scintillation monitoring receiver. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 1142–1152. [Google Scholar]
- Peng, S.; Morton, Y. A USRP2-based reconfigurable multi- constellation multi-frequency GNSS software receiver front end. GPS Solut. 2013, 17, 89–102. [Google Scholar] [CrossRef]
- Linty, N.; Dovis, F.; Alfonsi, L. Software-defined radio technology for GNSS scintillation analysis: Bring Antarctica to the lab. GPS Solut. 2018, 22, 96. [Google Scholar] [CrossRef]
- Curran, J.T.; Bavaro, M.; Fortuny, J. Developing an Ionospheric Scintillation Monitoring Receiver. Inside GNSS 2014, 60–72. Available online: http://www.insidegnss.com (accessed on 15 September 2019).
- Curran, J.T.; Bavaro, M.; Fortuny, G.J.J. An open-loop vector receiver architecture for GNSS-based scintillation monitoring. In Proceedings of the European Navigation Conference (ENC-GNSS), Rotterdam, The Netherlands, 15–17 April 2014; pp. 1–12. [Google Scholar]
- Linty, N.; Dovis, F. An open-loop receiver architecture for monitoring of ionospheric scintillations by means of GNSS signals. Appl. Sci. 2019, 9, 2482. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Jiao, Y.; Hall, J.J.; Morton, Y.T. Automatic equatorial GPS amplitude scintillation detection using a machine learning algorithm. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 405–418. [Google Scholar] [CrossRef]
- Linty, N.; Farasin, A.; Favenza, A.; Dovis, F. Detection of GNSS ionospheric scintillations based on machine learning decision tree. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 303–317. [Google Scholar] [CrossRef]
- Jiao, Y.; Hall, J.J.; Morton, Y.T. Performance evaluation of an automatic GPS ionospheric phase scintillation detector using a machine-learning algorithm. NAVIGATION: J. Inst. Navig. 2017, 64, 391–402. [Google Scholar] [CrossRef]
- Bousquet, O.; Herrmann, D.J.L. On the complexity of learning the kernel matrix. In Proceedings of the Advances in Neural Information Processing Systems (NIPS), Vancouver, BC, Canada, 9–14 December 2002; pp. 399–406. [Google Scholar]
- Liu, Z.; Zuo, M.J.; Zhao, X.; Xu, H. An analytical approach to fast parameter selection of Gaussian RBF kernel for support vector machine. J. Inf. Sci. Eng. 2015, 31, 691–710. [Google Scholar]
- Cristianini, N.; Shawe-Taylor, J. An Introduction to Support Vector Machines and Other KERNEL-Based Learning Methods; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Asa, B.H.; Weston, J. A user’s guide to support vector machines. Methods Mol. Biol. 2010, 609, 223–239. [Google Scholar]
- Hsu, C.-W.; Chang, C.-C.; Lin, C.-J. A Practical Guide to Support Vector Classification; Technical Report; Department of Computer Science, National Taiwan University: Taipei City, Taiwan, 2003. [Google Scholar]
- Savas, C.; Dovis, F. Comparative performance study of linear and gaussian kernel SVM implementations for phase scintillation detection. In Proceedings of the IEEE International Conference on Localization and GNSS (ICL-GNSS), Nuremberg, Germany, 4–6 June 2019; pp. 1–6. [Google Scholar]
- Linty, N.; Romero, R.; Dovis, F.; Alfonsi, L. Benefits of GNSS software receivers for ionospheric monitoring at high latitudes. In Proceedings of the 1st URSI Atlantic Radio Science Conference (URSI AT-RASC 2015), Las Palmas, Spain, 16–24 May 2015; pp. 1–6. [Google Scholar]
- Alfonsi, L.; Cilliers, P.J.; Romano, V.; Hunstad, I.; Correia, E.; Linty, N.; Dovis, F.; Terzo, O.; Ruiu, P.; Ward, J.; et al. First, observations of GNSS ionospheric scintillations from DemoGRAPE project. Space Weather 2016, 14, 704–709. [Google Scholar] [CrossRef]
- Jacobsen, K.S.; Dahnn, M. Statistics of ionospheric disturbances and their correlation with GNSS positioning errors at high latitudes. J. Space Weather Space Clim. 2014, 4, 1–10. [Google Scholar] [CrossRef]
- Jiao, Y.; Morton, Y.; Taylor, S. Comparative studies of high-latitude and equatorial ionospheric scintillation characteristics of GPS signals. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium—PLANS, Monterey, CA, USA, 5–8 May 2014; pp. 37–42. [Google Scholar]
- Gutierrez, D.D. Machine Learning and Data Science: An Introduction to Statistical Learning Methods with R; Technics Publications: Basking Ridge, NJ, USA, 2015. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning (Information Science and Statistics); Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Laface, P.; Cumani, S. Support Vector Machines; Class Lecture; Machine Learning for Pattern Recognition (01SCSIU), Politecnico di Torino: Turin, Italy, 19 March 2018. [Google Scholar]
- Shawe-Taylor, J.; Cristianini, N. Kernel Methods for Pattern Analysis; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Aronszajn, N. Theory of reproducing kernels. Trans. Am. Math. Soc. 1950, 68, 337–404. [Google Scholar] [CrossRef]
- Asa, B.-H.; Ong, C.S.; Sonnenburg, S.; Scholkopf, B.; Ratsch, G. Support vector machines and kernels for computational biology. PLoS Comput. Biol. 2008, 4, e1000173. [Google Scholar]
- Kinrade, J.; Mitchell, C.N.; Yin, P.; Smith, N.; Jarvis, M.J.; Maxfield, D.J.; Rose, M.C.; Bust, G.S.; Weatherwax, A.T. Ionospheric scintillation over Antarctica during the storm of 5–6 April 2010. J. Geophys. Res. 2012, 117, A05304. [Google Scholar] [CrossRef]
- Moraes, A.O.; Costa, E.; De Paula, E.R.; Perrella, W.J.; Monico, J.F.G. Extended ionospheric amplitude scintillation model for GPS receivers. Radio Sci. 2014, 49, 315–329. [Google Scholar] [CrossRef]
- Provost, F.; Fawcett, T. Data Science for Business: What You Need to Know about Data Mining and Data-Analytic Thinking; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2013. [Google Scholar]
- Fawcett, T. An introduction to ROC analysis. Pattern Recognit. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]
- Japkowicz, N.; Shah, M. Evaluating Learning Algorithms: A Classification Perspective; Cambridge University Press: New York, NY, USA, 2011. [Google Scholar]
- The Mathworks, Inc. MATLAB and Statistics and Machine Learning Toolbox R2016b; The Mathworks, Inc.: Natick, MA, USA, 2016. [Google Scholar]
- Wang, T. Development of the Machine Learning-Based Approach to Access Occupancy Information through Indoor CO2 Data. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2017. Available online: http://repository.tudelft.nl/ (accessed on 15 September 2019).
- Abdiansah, A.; Wardoyo, R. Time complexity analysis of support vector machines (SVM) in LibSVM. Int. J. Comput. Appl. 2015, 128, 28–34. [Google Scholar] [CrossRef]
- Claesen, M.; De Smet, F.; Suykens, J.A.; De Moor, B. Fast prediction with SVM models containing RBF kernels. arXiv 2014, arXiv:1403.0736v3. [Google Scholar]
- Bradley, A.P. The use of the area under the ROC curve in the evaluation of machine learning algorithms. Pattern Recognit. 1997, 30, 1145–1159. [Google Scholar] [CrossRef]
- Ting, K.M. Confusion Matrix. In Encyclopedia of Machine Learning; Sammut, C., Webb, G.I., Eds.; Springer: Boston, MA, USA, 2011. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dates | PRNs | Station | Coordinates | |
|---|---|---|---|---|
| 1 | 21 January 2016 3 February 2016 8 February 2016 17 August 2016 | 9 | South African Antarctic Research Base (SANAE-IV), Antarctic | Lat.: ° S Long.: ° W |
| 2 | 10 April 2013 12 April 2013 16 April 2013 4 October 2013 | 11 17 | Hanoi, Vietnam | Lat.: ° N Long.: ° E |
| SVM Method | Kernel Scale | Running Time | Validation Accuracy (%) | Operating Point | AUC (%) | |
|---|---|---|---|---|---|---|
| TPR | FPR | |||||
| Linear | 1 | 86.01 | 0.6772 | 0.0468 | 91.98 | |
| Coarse Gaussian | 6.9 | 1.28 | 86.29 | 0.6755 | 0.0482 | 90.10 |
| Medium Gaussian | 1.7 | 1.55 | 86.16 | 0.6751 | 0.0480 | 90.85 |
| Fine Gaussian | 0.43 | 1.70 | 85.95 | 0.6890 | 0.0530 | 93.16 |
| Polynomial (Order:2) | 1 | 1.37 | 86.26 | 0.6768 | 0.0485 | 89.38 |
| Polynomial (Order:3) | 1 | 3.20 | 86.04 | 0.6779 | 0.0488 | 92.67 |
| SVM Method | Kernel Scale | Running Time | Validation Accuracy (%) | Operating Point | AUC (%) | |
|---|---|---|---|---|---|---|
| TPR | FPR | |||||
| Linear | 1 | 90.44 | 0.8990 | 0.0460 | 95.37 | |
| Coarse Gaussian | 6.9 | 1.02 | 90.72 | 0.9004 | 0.0487 | 95.18 |
| Medium Gaussian | 1.7 | 1.18 | 91.65 | 0.9004 | 0.0487 | 95.19 |
| Fine Gaussian | 0.43 | 1.33 | 91.56 | 0.9018 | 0.0378 | 96.01 |
| Polynomial (Order:2) | 1 | 1.08 | 91.42 | 0.8920 | 0.0265 | 95.61 |
| Polynomial (Order:3) | 1 | 1.80 | 91.56 | 0.8927 | 0.0292 | 95.88 |
| CONFUSION MATRIX | ACTUAL | ||
|---|---|---|---|
| Scintillation | No-Scintillation | ||
| PREDICTION | Scintillation | True Positive (TP) | False Positive (FP) |
| No-Scintillation | False Negative (FN) | True Negative (TN) | |
| Phase Scintillation | Amplitude Scintillation | |||
|---|---|---|---|---|
| Accuracy | Error Rate | Accuracy | Error Rate | |
| Linear | ||||
| Coarse Gaussian | ||||
| Medium Gaussian | ||||
| Fine Gaussian | ||||
| Polynomial (Order:2) | ||||
| Polynomial (Order:3) | ||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Savas, C.; Dovis, F. The Impact of Different Kernel Functions on the Performance of Scintillation Detection Based on Support Vector Machines. Sensors 2019, 19, 5219. https://doi.org/10.3390/s19235219
Savas C, Dovis F. The Impact of Different Kernel Functions on the Performance of Scintillation Detection Based on Support Vector Machines. Sensors. 2019; 19(23):5219. https://doi.org/10.3390/s19235219
Chicago/Turabian StyleSavas, Caner, and Fabio Dovis. 2019. "The Impact of Different Kernel Functions on the Performance of Scintillation Detection Based on Support Vector Machines" Sensors 19, no. 23: 5219. https://doi.org/10.3390/s19235219
APA StyleSavas, C., & Dovis, F. (2019). The Impact of Different Kernel Functions on the Performance of Scintillation Detection Based on Support Vector Machines. Sensors, 19(23), 5219. https://doi.org/10.3390/s19235219